基于SIFT算法在遥感图像匹配中的研究
2016-10-17李校林王志锋
李校林,李 银,王志锋
(1.重庆邮电大学,重庆 400065;2.重庆信科设计有限公司,重庆 400065)
基于SIFT算法在遥感图像匹配中的研究
李校林1,2,李银1,王志锋1
(1.重庆邮电大学,重庆400065;2.重庆信科设计有限公司,重庆400065)
针对遥感图像在光照和几何差异等复杂因素上引起的匹配误差,深入研究了SIFT特征描述符的改进方法。利用特征点圆形区域来构造特征描述符,采用自适应量化策略用来局部区域的划分和梯度直方图的计算,并对每个描述子采用一种插值法重新确立主方向,改进SIFT算法的描述符。降低特征点维数的同时,又保证特征点描述符的独特性和鲁棒性。研究结果表明,改进的SIFT描述符在遥感图像几种复杂环境下都取得了预期的结果,证实了改进算法的可行性。
SIFT算法;特征匹配;特征描述符;主方向;自适应分级;遥感图像
针对SIFT算法在遥感图形匹配方面的不足,本文改进了SIFT描述符。首先利用一种基于插值法重新确定直方图的主方向,保证主方向的正确性;其次,提出了一种新的自适应策略形成了独特的描述子构造方法,增强了描述符的特殊性和鲁棒性。最后通过实验验证了本文改进算法在遥感图形方面的鲁棒性、实时性和匹配准确性都得到了显著提高,具有很强的现实意义。
1 SIFT算法简介
SIFT算法是近年来比较先进局部图像描述算法,主要基于以下3个步骤[6-7]:
1)关键点检测。关键点的检测是在构建的一系列高斯差值(DoG)图像上找到极值点,然后去除由DoG算子产生的不稳定的边缘响应点和低对比度的关键点。
2)关键点的方向分配。首先为每个特征点计算出一个方向,然后利用关键点邻域像素的梯度方向分布特性为其指定方向参数,使得到的算子具有旋转不变特性。
3)关键点描述符的生成。经过上述两步检测到的每一个关键点都具有3个信息,即尺度、方向和位置,这样确定的特征区域保证了关键点的尺度和旋转不变性,这一步主要通过局部梯度直方图构造的特征向量来描述关键点。

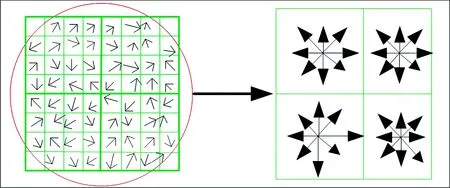
图1 SIFT特征点描述符局部构造
2 SIFT算法描述符的改进
2.1改进特征点主方向
陆游在蜀地的游历不仅感受了与江南迥异的风土人情,蜀地海棠、彭州牡丹的花容花貌,他在《入蜀记》和《老学庵笔记》中都有描述,还见识到了不同于江南呢哝软语的蜀地女子的美丽风情。蜀伎多才多艺,蜀女自有诗情,相传陆游曾在一个驿馆的墙壁上得诗一首,竟是驿卒女所写,陆游遂纳为妾④。
特征点的主方向是确保旋转不变特征的关键,如果主方向是不准确的,那么它可以影响特征点匹配的结果。本文提出基于插值法用来确定主方向
(1)
式中:binnew表示新生成的主方向;binini代表原主方向;mainl,main和mainr分别表示直方图峰值左侧、峰值和右侧的柱的值。
2.2改进特征描述子
SIFT描述符是基于特征点分布的,它运用方向方图来表示外观或形状不同的特点。为了这个目的,局部特征区域被分成不同的区域,并计算每个区域的特定直方图,最终的描述符是由这些直方图的有序级联给出。这往往在质量、数量、提取特征的分布、对光照强度和几何差异的敏感性上有存在问题,特别是在多源遥感图像中[8]。由于距离特征点越近的领域像素对特征点描述的影响越大,本节提出了一种新的自适应策略,提出了独特的描述子构造方法。通过采用自适应量化策略用来局部区域的划分和梯度直方图的计算,采用递减环数来表示特征点的邻域区域;代替使用单一的梯度直方图作为现有的局部描述符,根据距离局部特征中心的远近使用不同尺寸的多个梯度直方图。具体做法如下:
1)以局部特征点为中心,把归一化的部区域R根据不同的步长l(l1,l2,…,lm)分离成m个不重叠的圆环R(1),R(2),…,R(m)。
2)采用自适应的梯度方向直方图数K={k1,k2,…,km},这是不同于其他基于分布的方法在每个局部区域生成一个常数直方图。
3)对每个子区域R(m)进行均匀的角度量化,量化数为n,由此就可以确定每个子区域R(i,j),其中i={1,2,…,m},j={1,2,…,n}。
本文提出的描述符尺度计算参数值如表1。
表1描述符尺度计算参数值
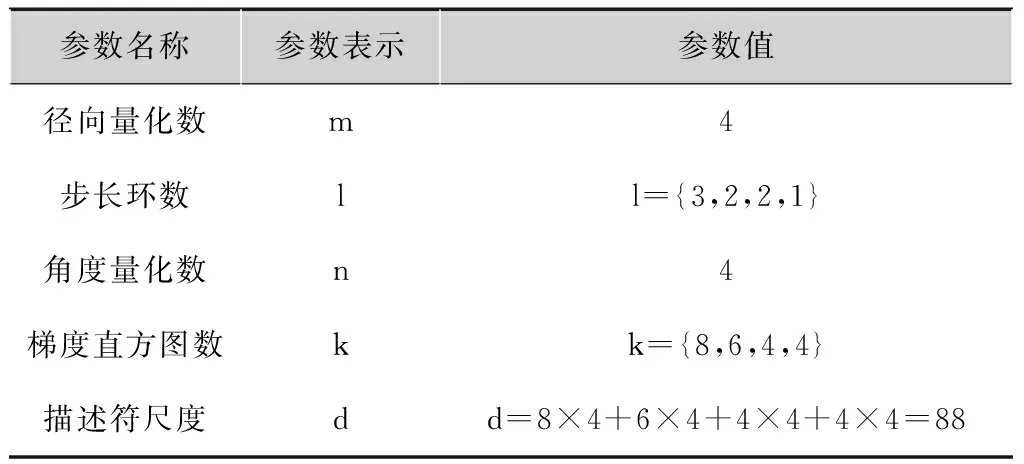
参数名称参数表示参数值径向量化数m4步长环数ll={3,2,2,1}角度量化数n4梯度直方图数kk={8,6,4,4}描述符尺度dd=8×4+6×4+4×4+4×4=88
由此可设计特征点描述符构造图如图2所示。
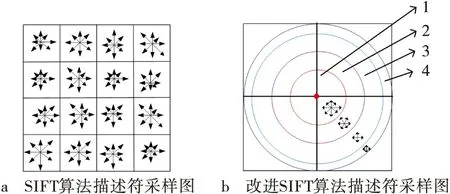
图2 改进前后构造描述符对比图
利用表1给出的参数值,采用不同的步长,即3、2、2、1的环数划分4个圆环,运用梯度直方图分别统计4个圆环内的不同梯度方向的梯度累加值。每个圆环内形成4个种子点,共有16个种子点;距离中心特征点的不同圆环分别取k={8,6,4,4}个方向向量信息,统计每个种子点生成的特征向量,总共得到88维的描述子向量。考虑到越靠近中心特征点的的像素对生成的描述子影响越大,将每个子区域生成的特征向量由内向外顺序排列。子区域1的特征向量作为最前面的1~32维;子区域2的特征向量作为33~56维;子区域3的特征向量作为57~72维;子区域4的特征向量作为73~88维。最后统计各个子区域内的灰度累加值,并将其进行归一化处理,进一步去除光照、噪声等复杂因素的影响。
3 实验结果与分析
实验平台为Windows7系统,CPU2.0GHz,内存2Gbyte,利用VS13+Opencv2.4.8平台进行仿真实验。无人机采取某城市一角1∶5 000的遥感图像,分别在不同场景下对选取图像进行实验对比,如图3所示。统计实验数据,并分析改进SIFT描述符算法的鲁棒性和匹配率。
其中正确匹配率的评价方法[9]可用公式表示为
(2)
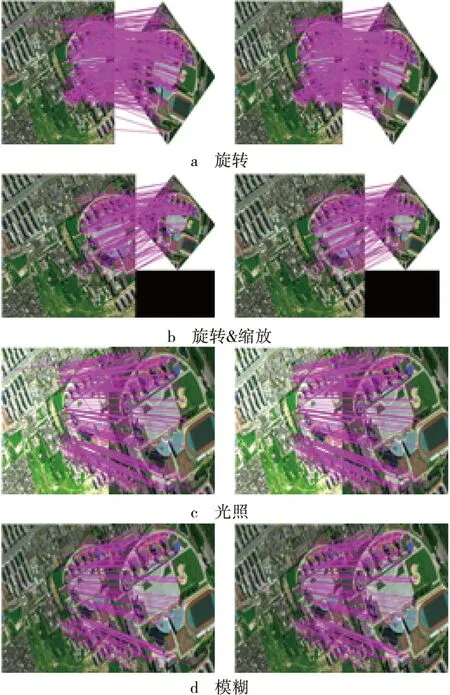
图3 实验对比图
从实验结果可以得出,运用本文提出的SIFT的改进算法在不同条件下对所选遥感图像进行匹配实验,其匹配效率和匹配时间都有明显增强。其中考虑到圆具有良好的旋转不变性,采用圆形区域来构造特征描述符,并根据离特征点距离不同来划分不同的子区域,提高了描述子的独特性,重新确定特征点主方向的方法也保证了每个匹配点的准确性,最终对每个描述符确立的88维特征向量,充分考虑了邻域内距离特征点不同的像素对特征点描述符影响不同这一特点,不仅减小了算法的时间复杂度,还增强了描述符的独特性和鲁棒性。分析表2数据可知,本文提出的改进对光照条件下的遥感图像匹配效果最好。与文献[10]介绍
表2实验数据对比

算法类型对比项图3a图3b图3c图3dSIFT算法匹配对数/对362148257146匹配时间/s8.675.386.764.79正确匹配率/%89.583.382.680.1本文算法匹配对数/对353142249144匹配时间/s5.454.013.013.23正确匹配率/%90.385.788.983.7
的GLOH描述子相比较,不仅满足遥感图像数据量大的特点,降低了算法的复杂度,计算速度得到一定的提高,而且增强了每个描述子的特征数的独特性,误匹配率也有所降低。
4 结束语
本文在深入研究SIFT特征匹配的基础上,针对遥感图像的特点提出了一种特征描述符的改进方法。采用自适应策略,提高了图像配准效率与配准精度,不仅满足遥感图像采集图像时的复杂环境,而且符合其数据量大对实时性的要求,具有很好的应用前景。
[1]徐丽艳.基于特征点的遥感图像配准方法及应用研究[D].南京:南京理工大学,2012.
[2]余婷,厉小润. 基于SIFT的全自动遥感图像配准算法[J].机电工程,2013(1):111-115.
[3]LOWE D G. Object recognition from local scale-invariant features[C]// Internat-ional Conference on Computer Vision. Greece: IEEE,1999:1150-115.
[4]LOWE D. Distinctive image features from scale-invariant key points[J]. Nit compute vis, 2004(60):91-110.
[5]SEDAGHAT A,EBADI H. Remote sensing image mathching based on adaptive bini-ng SIFT descriptor[J].IEEE transactions on geoscience and remote sensing,2015,53(10):5283-5292.
[6]肖健.SIFT特征匹配算法研究与改进[D].重庆:重庆大学,2012.
[7]马莉,韩燮. 主成分分析法(PCA)在SIFT匹配算法中的应用[J]. 电视技术,2012,36(1):129-132.
[8]CHAO D,YA L Q. An improved algorithm of multi-source retmote sensing image registration based on SIFT and Wavelet Trasform[J].IEEE institute of fiber communication & information eng-ineering college of information engineer-ing,2014,9(14):1189-1192.
[9]MIKOLAJCZYK K,SCHMID C. A perform-ance evaluation of local descriptors[C]//IEEE Computer Society Conference on computer Vision and Pattern Recognition. [S.l.]:IEEE,2005:257-263.
[10]BELLAVIA F,DOMENICO T. Impoving SIFT-based descriptor stability to rotation-ns[C]//International Conference on Pattern Recogntion. [S.l.]:IEEE,2010:3460-3463.
李校林(1968— ),硕士生导师,正高级工程师,主要研究方向新一代移动通信技术、天线与电波传播;
李银(1990— ),硕士生,主研计算机视觉、图像处理;
王志锋(1989— ),硕士生,主研图像处理、机器学习。
责任编辑:闫雯雯
Research SIFT matching algorithm based on remote sensing image
LI Xiaolin1,2,LI Yin1,WANG Zhifeng1
(1.ChongqingUniversityofPostsandTelecommunications,Chongqing400065,China;2.ChongqingInformationTechnologyDesigningCo.Ltd.,Chongqing400065,China)
For remote sensing image matching error on the complex factors causing differences in light and geometry, in-depth study of the improved method of SIFT feature descriptor. Use a circular area to construct the feature point feature descriptor, adaptive quantization strategy used to calculate the histogram division and gradients local area, and each descriptor uses an interpolation method to re-establish the main direction, improved SIFT algorithm descriptor. Reduce the dimension of feature points, they also feature point descriptor ensure uniqueness and robustness. The results show that the improved SIFT descriptors in the complex environment of several remote sensing images have achieved the expected results, confirming the feasibility of the improved algorithm.
SIFT algorithm; feature matching; feature descriptor; main direction; adaptive classification; remote sensing image
TP317
A
10.16280/j.videoe.2016.09.022
重庆市研究生科研创新基金项目(CYS15166)
2015-11-16
文献引用格式:李校林,李银,王志锋. 基于SIFT算法在遥感图像匹配中的研究[J].电视技术,2016,40(9):108-111.
LI X L,LI Y,WANG Z F. Research SIFT matching algorithm based on remote sensing image[J]. Video engineering,2016,40(9):108-111.