基于模糊逻辑与数据融合的智能导盲手杖
2016-10-17陈冠宇刘宇红李乐乐
陈冠宇,刘宇红,李乐乐
(贵州大学 大数据与信息工程学院,贵州 贵阳 550025)
基于模糊逻辑与数据融合的智能导盲手杖
陈冠宇,刘宇红,李乐乐
(贵州大学 大数据与信息工程学院,贵州 贵阳 550025)
在分析国内外现有导盲设备的基础上,引入模糊逻辑与数据融合算法,对传统超声波探测方式进行改进。自行设计并组建超声波障碍物探测网络,进行数据采集、融合与分析,实现了对障碍物方位与距离的综合探测。此外,利用GPS模组、网络通信技术以及语音合成芯片设计,并实现了智能导盲手杖的GPS位置信息实时获取、GPRS短信提示、蓝牙语音提示等功能,以满足盲人日常生活的需求。
障碍物探测网络;模糊逻辑;数据融合;地理位置实时获取;蓝牙语音提示
随着导盲设备的广泛使用,有关导盲设备的研究日益深入。但多数导盲设备,存在功能单一、操作复杂、准确性不高、不易于携带等问题,无法满足盲人日常生活中需求多样性[1]。因此迫切需要一种多功能、智能化、操作简单且价格低廉的智能导盲设备来辅助盲人的日常生活。
手杖作为盲人日常的必备辅助工具,是导盲设备外观设计的最佳选择。现有的导盲手杖在障碍物探测环节,大多采取超声波探测的方式,即利用传感器,实现单一方向上障碍物探测。由于超声波探测的方向性较差,单一传感器仅能实现对障碍物距离的探测,无法准确对障碍物方位进行判定;另外控制系统过于简单,致使探测精度不高[2-4]。
随着模糊控制理论研究的不断深入,将其引入到系统设计中可以使系统控制方案得到进一步优化、行进轨迹也会更加合理,因此将模糊控制应用在导盲仪器上是发展的必然趋势[5-7]。
本文所设计的智能导盲手杖,利用模糊逻辑以及数据融合的思想,组建了超声波障碍物探测网络,进行数据采集与分析,实现对障碍物所在方位与距离的综合探测。此外,手杖还设计实现了对使用者地理位置信息的实时定位与显示、紧急情况下的短信报警以及蓝牙语音提示等功能,以满足盲人在日常生活与出行中的多种需求。
1 设计思路
智能导盲手杖功能系统结构框图如图1所示,系统主要由手杖端和外部服务端两部分组成,手杖端集成了主控单元、超声波障碍物探测网络、数据辅助、语音提示、GPS卫星定位、GPRS通信等模块;外部服务端则是由在PC机上搭建的服务器以及百度地图服务器两部分构成,用于对GPS模块获取的经纬度信息进行收发以及其所代表的地理位置的解析。
手杖端与外部服务端的协同运行,将实现对障碍物方位及距离的综合探测、当前实际地理位置信息的实时获取,以及蓝牙语音提示和GPRS模块的短信发送功能,将使用者所在地理位置信息发送至家人手机,以便使用者可以在遇到突发情况时让家人得知其当前所在位置。

图1 智能导盲手杖功能系统结构框图
2 系统设计
2.1主控单元
主控单元作为智能导盲手杖的控制核心,承担着整体系统中各模组间的数据融合、判断与控制。本设计采用STM32F103RDT6作为主控单元,利用USART串口通信实现主控单元与各模组之间的数据交互。在此基础上,为实现手杖各部分功能协调有序的运行,主控单元上还搭载了uC/OS-Ⅲ实时操作系统,实现对各个功能模组任务的调度,以保证系统稳定性与实时性[8]。
2.2超声波障碍物探测网络
障碍物探测功能是手杖实现导盲功能的重要环节。由于超声波检测的方式能够实现非接触性测量,能量消耗缓慢,环境适应能力强,且测距技术较为成熟,被广泛用于距离的测量[9]。本设计在传统超声波测距方式的基础上,不仅要求系统具备较高精度的距离探测性能,还应具备良好的方位判别性能。为满足这一要求,手杖利用4个ST1428超声波探测器组建了超声波障碍物探测网络。利用模糊数学的理论,对网络的探测区域进行模糊子集的划分,并利用数据融合的思想,对各探测器所采集的不同空间区域中的障碍物距离信息进行综合、过滤、合成及分析,从而获得障碍物方位信息。图2所示为障碍物探测网络及方位划分示意图。

图2 超声波障碍物探测网络及方位划分示意图
探测网络被划分成6个区域(俯视图中区域VI与III重叠),从I~VI分别代表左方、左前方、前方、右前方、右方以及下方等方位。探测器完成数据采集后,4个探头的数据会通过模糊逻辑算法进行数据融合,通过数据间相关性和隶属度关系的分析,实现障碍物与使用者相对方位的判定。
探测网络采用多次探测的方法进行数据采集。先令探测器0发出探测波,0、1、2探测器同时接收回波,获取距离信息;再依次令1和2先行探测,再令所有探测器同时接收回波,3次距离数据将会构成一个3×3的数据空间
Ri=[di0di1di2]
(1)
其中,i为当前进行探测的探测器,i=0,1,2;dij为i探测时探测器j检测到的距离,j= 0,1,2;每个传感器的测量数据会以不同的隶属关系隶属于各个探测器,这种隶属关系为隶属度。隶属度函数以传感器与障碍物距离为变量,距离越小,则隶属于某个传感器的程度越大。故定义数据的隶属度函数
(2)
式中,uij为i探测器探测时,障碍物对探测器j的隶属度;3次探测数据的隶属度空间为
(3)
其中,隶属度空间的每一列均表示障碍物隶属于探测器j探测区域的隶属度。对每一列隶属度进行求和可得
(4)
根据φ0、φ1、φ2的大小关系,设阈值为δ,则有:当|φi-φj|≤δ时,则障碍物位于探测器i与j(i≠j,i,j=0,1,2)探测区域的重叠部分,如Ⅰ和Ⅳ;当|φi-φj|>δ且φi>φj(φi<φj)或φi=1(φj=1)时,则障碍物位于探测器i(j)的独立探测区域(i≠j;i,j=0,1,2),如Ⅰ、Ⅲ、Ⅴ。
由此可判定障碍物位于图2中5个区域的其中之一,从而判断出其相对于使用者的方位。而区域Ⅵ(下方)可通过设置中断阈值实现判定。
探测器0、1、2构成上方探测网络,并以α=80cm为探测阈值,当探测区域内的障碍物距离小于阈值时,系统会开启蓝牙语音提示功能,为使用者循环提示障碍物方位及距离信息的变化;下方探测器3的探测阈值β= 40cm。当探测距离小于下方阈值时,系统则利用主控芯片的中断服务机制,提示使用者障碍物位于下方,并告知距障碍物离。
2.3地理位置信息实时获取
当使用者在户外时,手杖将作为客户端,其中GPS模块会实时获取当前位置的经纬度,并利用GPRS通信模块的GPRS流量通信的方式,将经纬度通过Socket通信的方式,发送至预先搭建的PC机服务器。PC机服务器调用百度地图应用程序编程接口(ApplicationProgrammingInterface,API),实现经纬度信息到地理位置信息的转换。
此后,地理位置信息会被发送至家人所使用的Android智能手机上,并对使用者的位置进行可视化显示,方便家人通过手机应用程序对手杖使用者的位置进行实时了解。同时,地理位置信息会被发送至手杖端,从而完成了整个GPS经纬度信息获取与地理位置解析的过程,解析过程如图1所示。
当使用者迷路时,通过触发按键,在蓝牙语音模组生成的语音提示下,可得知当前所在地理位置信息[10-13];若使用者急需家人帮助,则可以通过触发按键,在GPRS模块与SIM卡的配合使用下,实现短信发送功能,将位置信息发送至家人预存在数据辅助模块内部的安全数码卡(SecureDigitalMemoryCard,SD卡)中的手机上。可在使用者遇到突发情况时,令家人快速得知其所在位置。
2.4语音提示模块
语音提示模块是实现手杖与使用者之间良好交互的重要环节,其主要功能是将障碍物探测、地理位置信息以及系统提示信息以语音的方式告知使用者[14-15]。
设计采用SYN6288语音合成芯片将以上文本信息合成为相应的语音提示片段。在得到语音提示片段后,再利用蓝牙4.0模块实现语音提示片段的无线传输,使用者通过佩戴蓝牙耳机,即可接收到来自手杖的各种提示信息,并按照指示完成相关功能操作,使用方便快捷。
3 实验测试数据分析
障碍物探测网络作为智能导盲手杖的核心模块,也是实验测试的重点。如表1所示,为手杖上方3个探测器对依次放置在探测区域Ⅰ~Ⅴ,且与手杖相距50cm的障碍物的探测数据。
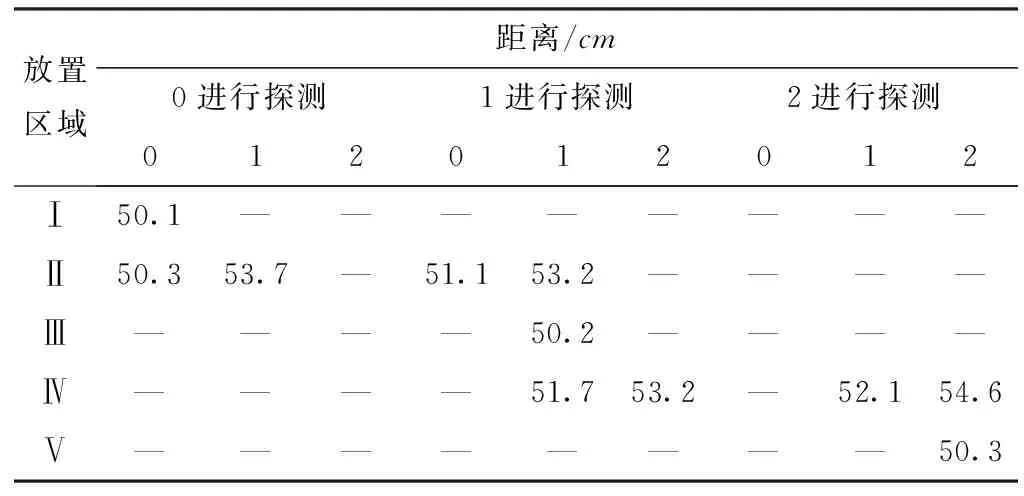
表1 不同区域内障碍物距离探测数据
注:“—”表示因设备探测范围限制未采集到数据
由表1可知,当障碍物位于Ⅱ区,即左前方时,经过3个探测器依次探测的数据如表中第二行所示。由此得到数据空间R中的d00,d01以及d10,d11,其他数据均置0。根据式(2)和式(3)得到隶属度空间u,再由式(4)得到φ0=0.974,φ1=1.026,φ2=0,由于|φ0-φ1|=0.052<δ( 是根据多次实测数据而确定的阈值),因此障碍物位于区域Ⅱ,即左前方。
区域Ⅳ判定方法同理,实现对左前方与右前方的判定;而区域Ⅰ、Ⅲ、Ⅴ则因其相应的φi= 1(i=0,1,2),系统可直接判定障碍物位于探测器i的独立探测区域中,即I(左方)、III(前方)、IV(右方);区域VI(下方)障碍物的判定,是根据下方探测器4独立完成,当障碍物距离小于下方探测阈值β时,系统会判定障碍物位于下方。通过该实验可知系统能够对障碍物所在方位进行正确判定。
除对障碍物方位判别实验外,实验运用网络探测以及传统单一传感器探测两种方式,对匀速接近手杖的障碍物进行了探测,并对其结果进行对比,对比图如图3所示。

图3 网络探测与传统单一传感器探测对比图
由图3数据曲线可知,超声波探测网路探测所得的数据,在经过模糊逻辑与数据融合算法的处理后,其数据与实际距离更加接近,并且拟合曲线趋于平缓,与单一传感器探测相比更为稳定,突变点位较少,在实际使用中能够对探测范围内的移动障碍物进行更为实时且精确的探测。
4 结束语
本文设计在传统超声波障碍物探测的基础上,通过引入模糊逻辑与数据融合算法以及传感器网络技术,实现了对障碍物所在方位的准确判断与距离探测,并采用多次探测的方法,使得手杖在对移动障碍物的探测时,令所得距离数据具有良好的稳定性、精度及实时性。
此外,本文还对智能导盲手杖的地理位置信息获取、短信发送以及无线语音提示等功能的实现进行了设计,使得手杖的功能更加智能化,以满足盲人使用者的日常需要。目前手杖各部分模块均已设计实现,且正常运行,但依然存在功能模块较多、功耗较大的问题需要进一步解决。
[1]于连甲.盲人手杖的国家标准[J].中国康复,1998,13(4):181-183.
[2]吴汉熙,肖本贤.基于模糊控制的超声波避障方法的研究[J].控制工程,2006,8(10):56-59.
[3]王化祥.传感器与检测技术[M].北京:电子工业出版社,2010.
[4]宋文,杨帆.传感器与检测技术[M].北京:高等教育出版社,2004.
[5]康耀红.数据融合理论与应用[M].西安:西安电子科技大学出版社,2006.
[6]高青.多传感器数据融合算法研究[D].西安:西安电子科技大学,2008.
[7]李士勇.模糊控制[M].哈尔滨:哈尔滨工业大学出版社,2011.
[8]石惠文,张勇.基于MSP430单片机的智能导盲手杖[J].科技世界,2014(8):155-156.
[9]朱劲夫,程方明.基于GPS和GSM智能手杖的设计与实现[J].电子技术与软件工程,2015(12):139-141.
[10]张新乔,李强,徐振中.基于GPS/GSM的智能导盲手杖设计[J].南方农机,2015(12):62-65.
[11]韦志强,周泽天,叶文通,等.智能导盲车硬件系统设计[J].电子制作,2013(7):119-122.
[12]仲小英.基于GPS和GSM的多功能智能拐杖设计[J].电脑知识与技术,2015,11(26):101-103.
[13]黄培,徐立鸿,王乐达.基GSM/GPRS的温室环境远程监控系统设计[J].微型机与应用,2012,31(18):45-47.
[14]刘永录,衣红钢,巩宪锋,等.基于GSM/GPRS的无线数据采集系统[J].信息安全与通信保密,2005(11):112-114.
[15]孙德辉,马文丽,姚文娟.基于GPRS的无线传输系统设计与实现[J].微计算机信息,2007,23(21):104-106.
An Intelligent Blind-guiding Cane on Fuzzy Logic and Data Fusion
CHEN Guanyu, LIU Yuhong, LI Lele
(College of Big Data and Information Engineering, Guizhou University, Guiyang 550025, China)
On the basis of analyzing the domestic and abroad existing blind-guiding equipment, the traditional ultrasonic detection algorithm is improved by introducing the fuzzy logic and data fusion algorithm. An ultrasonic obstacle detection network is designed and built for data collection, fusing and analysis, capable of comprehensive detection of the obstacle orientation and distance. The GPS module, online communication technology and speech synthesis chip are employed to achieve a series of functions, such the real-time GPS location acquisition, GPRS SMS prompts and Bluetooth voice prompts, to meet various needs of the blinds in their everyday life.
obstacle detection network; fuzzy logic; data fusion; real-time location getting; voice prompts by Bluetooth
2016- 02- 27
陈冠宇(1988-),男,硕士研究生。研究方向:嵌入式通信系统。刘宇红(1963-),男,教授。研究方向:嵌入式系统开发的。李乐乐(1988-),男,硕士研究生。研究方向:电路设计等。
10.16180/j.cnki.issn1007-7820.2016.09.031
TP316.2
A
1007-7820(2016)09-114-04
