电梯门锁啮合深度的图像测量方法研究
2016-10-14周薇郑耿峰张健
周薇,郑耿峰,张健
(福建省特种设备检验研究院高新技术研究所,福建福州350008)
电梯门锁啮合深度的图像测量方法研究
周薇,郑耿峰,张健
(福建省特种设备检验研究院高新技术研究所,福建福州350008)
为了提高电梯门锁的检测精度和效率,提出采用图像识别的方法实现电梯门锁啮合深度的测量。首先,通过触点接通电压突变的特性采集电梯门闭合瞬间的门锁图像,然后在HSV空间中采用阈值法分割出图像中的红色标记区域,选择离心率和连通域面积作为衡量标准进行刻度线和标记点的特征提取,同时采用密度聚类实现有效像素点筛选,最后通过分层霍夫变换识别和定位刻度线,对其累加得到啮合深度。对本文算法的试验表明,本文算法提取刻度线的准确率达93.8%,耗时753 ms,能满足实时检测要求。
电梯门安全;啮合深度;图像识别;分层霍夫变换
电梯事故的种类按发生事故的系统位置可分为:门系统事故、冲顶或蹲底事故、其他事故,据统计,门系统事故占到了事故总起数的80%左右[1],确保电梯门系统的正常运行至关重要。电梯国标GB10060-1993《电梯安全验收规范》及国家质检总局颁布的《电梯监督检验规定》中提出:电梯轿厢在锁紧元件啮合长度不小于7 mm时才能启动。目前,检验员主要采用直尺测量电气装置触点刚刚闭合时锁紧元件的啮合深度,存在较大的误差,无法保证检验效率和测试精度。机器视觉系统具有速度快、精度高、抗干扰能力强等突出的优点,近年来在在工业检测中得到了广泛应用,促进了生产线的自动化和智能化。提高电梯检测智能化水平是我国电梯检测发展的必然趋势。
上海交通大学[2]研究了电梯导轨垂直度检测机器人来检测导轨垂直度,可移动机构搭载发光圆环在竖直导轨上运行,并由安置在井底的摄像机对发光圆环的位置进行摄像,通过图像处理技术得到发光圆环空中位姿参数,从而实现导轨垂直度的检测。北京市朝阳区特种设备检测所[3]使用相机采集门锁锁钩的图像,基于形状匹配的方法搜索与模板图像相似的图像区域,自动计算门锁的啮合深度,该方法简单直接,但是不具备旋转不变性和尺度不变性,因此只适用于特定条件下的门锁啮合深度测量。
本文提出采用基于图像识别的方法测量电梯门锁的啮合深度,在门锁上粘贴刻度标识,电梯门接通瞬间触发摄像头采集电梯门锁图像,通过对刻度线的提取和识别得到啮合深度,本文的研究旨在提高电梯检测数据的精度、减少检验员的时间花销,同时为电梯门系统事故鉴定提供测试条件。
1 电梯门锁啮合深度的图像测量方法
本文采用视频成像技术建立电梯门锁啮合深度测量系统,使用工业摄像头采集门锁锁钩图像,设计图像处理算法,计算门锁啮合深度。
轿厢启动瞬间指触点接触引起门锁电路导通或断开瞬间的状态。在电梯门锁电路通断的瞬间,两个触点间电压值由V突变为某一接近零的值,电压阶跃的变化产生脉冲式的触发信号,为图像采集提供轿厢启动瞬间的同步信号,电梯门锁啮合深度的图像测量过程如图1所示。
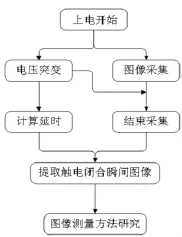
图1 电梯门锁啮合深度的图像测量过程
2 基于图像识别的刻度线提取
在获取触点闭合瞬间的电梯门锁图像后,本文采用基于图像识别的方法实现刻度线检测,主要的步骤有:基于HSV彩色空间的图像分割、形态学图像特征检测和基于霍夫变换的刻度线提取。
2.1HSV彩色空间中的图像分割
图像分割是从杂乱无章的信息中获取有意义的对象集合体的过程,现有的图像分割方法主要有:基于阈值、基于区域和基于边缘的分割方法[4],本文通过设置彩色信息的阈值实现图像分割。由于RGB颜色空间中分量之间相关程度很高,难以描述颜色认知属性,而HSV(Hue Saturation Value)颜色空间的描述更直观,更符合人的视觉特性[5]。Androutsos等人通过实验对HSV颜色空间进行了大致划分,H分量的范围是[0,360°),S分量的范围是[0,255],V分量的范围是[0,255]。
为了增强图像中的线条信息,采用反锐化掩模算法实现图像增强,计算公式如式(1):

2.2形态学图像特征检测
图像特征可分成3类:尺寸测量、形状分析和纹理分析,基于形态学的特征检测能够有效地用于目标物体的分类和识别,常用的形状有:椭圆离心率、圆形度和形状描述子等。本文采用离心率和区域面积实现特征提取。与区域具有相同标准二阶中心矩的椭圆的离心率定义为两焦点的距离与长轴长度的比值,是椭圆扁平程度的一种量度,在[0,1]的范围内,值越大,形状越趋于扁平,表达式如式(2):

其中,a、b、c分别为与区域具有相同标准二阶矩的椭圆的长轴长、短轴长和两焦点的距离,e为椭圆离心率。
2.3基于密度聚类的特征筛选
聚类是指将物理或抽象的对象集合分成由类似的对象组成的多个类的过程。由聚类所生成的一组数据对象的集合被称为簇,同一个簇中的对象彼此相似,与其他簇中的对象相异。利用基本密度的常有噪声的窨聚类(DBSCAN),把具有足够高密度的区域划分为簇,去除目标区域以外满足形态学特征的稀疏区域的干扰。DBSCAN算法的思想是:对于图像中符合条件的每一个点,计算给定半径邻域内的点的个数,如果该点在指定半径内的邻接点数大于给定的阈值,则属于核心点,那么将处于该半径内的点归为一簇,同时采用广度优先遍历此邻域内的点,逐步将这个簇扩大,重复这种操作,直到所有的点都被访问[6]。
对于图像I,可表示为:

其中,pm={(x,y)|x∈Z,y∈Z,1≤x≤n,1≤y≤n}。
核心点、边界点和噪声点的定义为:

其中,N[epsneb(pm)]为点pm邻域eps范围内的点的数量,epsneb(pm)是点pm的邻域,满足:

2.4基于霍夫变换的刻度线提取
霍夫变换提取直线的原理是在二维坐标平面中,所有经过点(x,y)的直线可以由坐标原点到直线的距离ρ和直线的垂线与X轴的夹角θ来描述,参数方程为:

假如图像空间的一条直线上有n个像素点,那么参数空间上相交于(ρ,θ)点上的曲线则有n条,通过设置构成直线的像素点个数,即可判断其是否为直线。传统的霍夫变换方法对每个有效像素点均做[-90°,90°)的坐标空间变换,计算量非常大,本文采用分层霍夫变换的思想[7],首先每隔5°计算n值,在最大值对应的方向上,然后在该区间内精确定位直线,大大降低了直接检测的计算量。
通过比较标记点坐标与刻度线坐标关系,即可得到电梯门锁的啮合深度。
3 试验验证与分析
本课题组采集了大量不同结构的电梯门锁在接通电气触电瞬间的图像,用于电梯门锁啮合深度的图像测量方法研究。
3.1电梯门锁啮合深度测量算法的试验分析
选取其中一幅图像对电梯门锁啮合深度的图像测量方法的过程进行分析,如图2所示,图2(a)是获取的电梯门锁的原图,采用RGB颜色空间和HSV颜色空间分别进行阈值分割后得到的效果如图2(b)和图2(c),RGB空间的阈值难以确定,并且容易看出分割出的刻度线存在较严重的断裂现象,对后续的特征提取造成较大的干扰,这是由于RGB各分量相关性大,难以准确的表征颜色;而HSV空间可以较好的分离出刻度线,且对不同光线下的红色特征具有较强的鲁棒性,但是仍然存在形状不规则的干扰区域。通过形态学算法和DBSCAN密度聚类相结合,效果如图2(d),此时仅含有刻度线和标记点的区域已完整提取出来,基于霍夫变换的直线检测效果如图2(e)所示,仅有一条直线未被检测出来,文中依据直线间距离恒定做出决策,计算出漏检的直线,具有一定的容错性能。对二十幅图像结果进行统计分析显示,本文算法提取刻度线的准确率达93.8%,且均能准确显示出标记点对应的刻度线结果。

图2 电梯门锁啮合深度测量
3.2时间性能分析
本文通过两个措施提高算法运行效率:1)由于获取的原图空间分辨率大,在图像分割过程中耗时较长,因此在后续处理中,自动剪裁掉不含目标像素的边缘区域,有效缩短了处理时间;2)由于适用于本文的刻度线与水平线的夹角较小,因此设置在[-90°,-70°]∪[70°,90)区间内进行直线提取,并采用分层霍夫变换的思想,每隔5°进行直线检测,运行时间缩短了三分之二。本文算法在内存2 G,Win32位PC机上测试,各个步骤需要的时间如表1所示,总耗时753 ms,能够满足实时测量的要求。

表1 本文算法各个步骤耗时
4 结束语
文中提出了采用图像识别的方法进行电梯门锁啮合深度测量,旨在提高电梯检测数据的精度、减少检验员的时间花销,同时为电梯门系统事故鉴定提供测试条件。采用HSV颜色空间进行图像分割,通过离心率和连通域区域等形态学算法实现特征检测,并结合DBSCAN聚类算子去除干扰区域,最后利用分层霍夫变换完成刻度线提取,最终实现对标记点指向的刻度数的计算。对不同结构的电梯门锁在接通电气触电瞬间的图像进行本文测量算法的验证分析和时间性能分析,提取刻度线的准确率达93.8%,耗时753 ms,能够满足实时测量的要求。
[1]杨柏山.重视电梯门系统参数对电梯安全运行的影响[J].科技创新导报,2013(21):62.
[2]郑淑娟.电梯门系统状态监控和实验研究[D].上海:上海交通大学,2009.
[3]王跃宗,卢志远,杜文广,等.电梯门锁啮合深度视频检测系统设计[J].中国特种设备安全,2012,28(11):13-15.
[4]蔡燕伟,崔红霞.基于彩色空间的二维OSTU的图像分割算法[J].电子设计工程,2014,5:131-133.
[5]Phan R,Androutsos D.Colour logo and trademark retrieval and tracking in unconstrained image sequences using Colour Edge Gradient Co-occurrence Histograms[C]//Electrical and Computer Engineering,2009.CCECE'09.Canadian Conference on.IEEE,2009:225-228.
[6]周薇,马晓丹,张丽娇,等.基于多源信息融合的果树冠层三维点云拼接方法研究[J].光学学报,2014(12):193-200.
[7]邸男,朱明,王毅楠.提取直线特征实现机场跑道实时检测[J].光学精密工程,2009,17(9):2336-2341.
Image measurement on meshing depth of elevator door
ZHOU Wei,ZHENG Geng-feng,ZHANG Jian
(Fujian Special Equipment Inspection and Research Institute,Fuzhou 350008,China)
In order to improve the accuracy and efficiency of elevator door detection,this paper proposed a novel method based on image recognition to measure the meshing depth of elevator door.Firstly,elevator door image was acquired relying on voltage transients caused by contact connected.Secondly,red labeled areas were segmented by setting threshold of hue component in HSV(Hue Saturation Value)color space,and feature regions were checked out combining morphological characteristics with density clustering algorithm.Thirdly,hierarchical Hough transform was used to recognize and pinpoint tick marks.Finally,meshing depth was obtained by cumulating tick marks above mark point.Several groups of experiments were conducted for verification.Simulation experiments show the algorithm is completed within 753 ms and its positioning accuracy rate reaches 93.8%,which proves that this method can meet the requirements of real-time detection.
elevator door safety;meshing depth;image recognition;hierarchical Hough transform
TP242.62
A
1674-6236(2016)12-0156-03
2015-07-15稿件编号:201507111
福建省质量技术监督局科技项目(FJQI2012018)
周薇(1990—),女,江西抚州人,硕士。研究方向:机器视觉。
