一种旋转型机器人柔性关节设计与分析
2016-10-13史延雷张明路张小俊
史延雷 张明路 张小俊 白 丰
河北工业大学,天津,300132
一种旋转型机器人柔性关节设计与分析
史延雷张明路张小俊白丰
河北工业大学,天津,300132
通过对人类膝关节柔性产生机理研究,仿照动物关节肌肉-肌腱组织设计出一种适用于电机驱动的旋转型柔性关节。通过研究对比旋转型SEA(serieselasticactuator)与直线型SEA机构特点,提出一种由8个压缩弹簧协同组成的柔性输出机构,并建立柔性输出机构刚度模型,确立了弹性元件参数与柔性关节等效刚度的数学关系。在此基础上,对柔性关节整体进行紧凑化设计,电机、减速器、柔性输出机构集中安装于关节部位,使柔性关节模块化、通用性强。通过对该柔性关节软件仿真及关节样机测试,验证了关节抗冲击能力和柔性输出能力可以满足柔性关节型机器人对柔性关节的应用需求。
机器人;柔性关节;紧凑设计;串联弹性驱动器
0 引言
关节型机器人以其活动灵活、工作空间大的特点,广泛应用于工业、医疗等各个领域。传统的机器人关节采用刚性设计方法,运动速度、精度已经达到较高水平,但随着机器人应用的不断普及,面对新任务,传统刚性关节已经不能满足要求:工作在障碍物较多的未知环境,刚性机器人因碰撞障碍物而导致精度降低或损坏;在与人类肢体直接接触的助残、康复、外骨骼机器人上,安全问题是设计过程中必须考虑的重要方面,刚性机器人即使配合各类传感装置,安全系数仍不能达到要求[1]。
事实上,大自然中动物与人的运动关节就表现出了非常出色的运动特性,不仅具有快速响应能力、大力矩输出能力,还体现出优秀的柔顺特性。关节柔顺特性不仅仅保护动物机体组织在外力作用时免受损伤,而且能够保证精准的力输出。参考动物关节特性,国内外研究人员提出了在驱动器与执行器间串联弹性元件的串联弹性驱动器(series elastic actuator,SEA),并基于此柔性驱动器原理设计出了多种具有柔顺特性的机器人关节结构。
Kong等[2]设计的外骨骼机器人,通过在一级减速与二级减速之间串联扭簧,实现了机器人关节的柔顺特性,主要用来实现小腿关节的转动。Knox等[3]研制的双足机器人KURMET,腿部由四个圆形弹性驱动器实现周向驱动,采用扭转卷簧作为柔性产生单元。Lens等[4]设计了一款应用在轻型机械臂BioRob机器人上的串联弹性驱动器,电机力矩输出通过柔性绳索驱动关节运动,达到柔性输出的目的。
尹鹏等[5]设计的面向足式机器人的柔性关节,由多个相对独立的盘体组成,盘上加工有不同形状的滑槽,不同转盘间的相对转动将推动滑块转动,滑块通过扭簧驱动关节,实现了关节的柔性输出。同时,关节通过两组特制钢丝绳线缆驱动,利用杠杆原理,达到了柔性关节输出刚度可调的目的。
目前大部分柔性关节依据特定机器人设计,普遍存在柔性实现机构体积大,驱动元件与传动机构不够紧凑,柔性关节整体集成度不高,柔性关节通用性差的特点[6-8]。本文基于柔性关节研究现状[9-14],以串联弹性驱动为核心展开研究,设计出了一款紧凑、通用的机器人柔性关节,在完成关键刚度模型分析的基础上进行了关节的结构设计与样机研制。
1 动物关节柔性产生机理研究
图1是人类膝关节结构图。膝关节连接股骨和胫骨,是人体最大且构造最复杂的关节,人类行走、跑步、跳跃均由膝关节完成。股四头肌是膝关节运动的“驱动器”,通过股四头肌的伸缩,完成小腿伸、大腿伸屈、维持站立等动作,股四头肌与胫骨通过肌腱、韧带连接,通过肌腱、韧带牵引胫骨转动。肌腱是一种黏弹性物质,这种物质在受到迅速拉伸时,能够产生较大的弹性力,肌腱的串联弹性可使肌肉在最佳范围内运动,在奔跑、跳跃过程中,关节的肌腱、韧带被认为是动物储存和释放能量的机构,也称为弹性储能元件,起到柔性缓冲、能量储存、能量放大等重要作用,是实现关节柔顺特性的重要组成部分[15-16]。
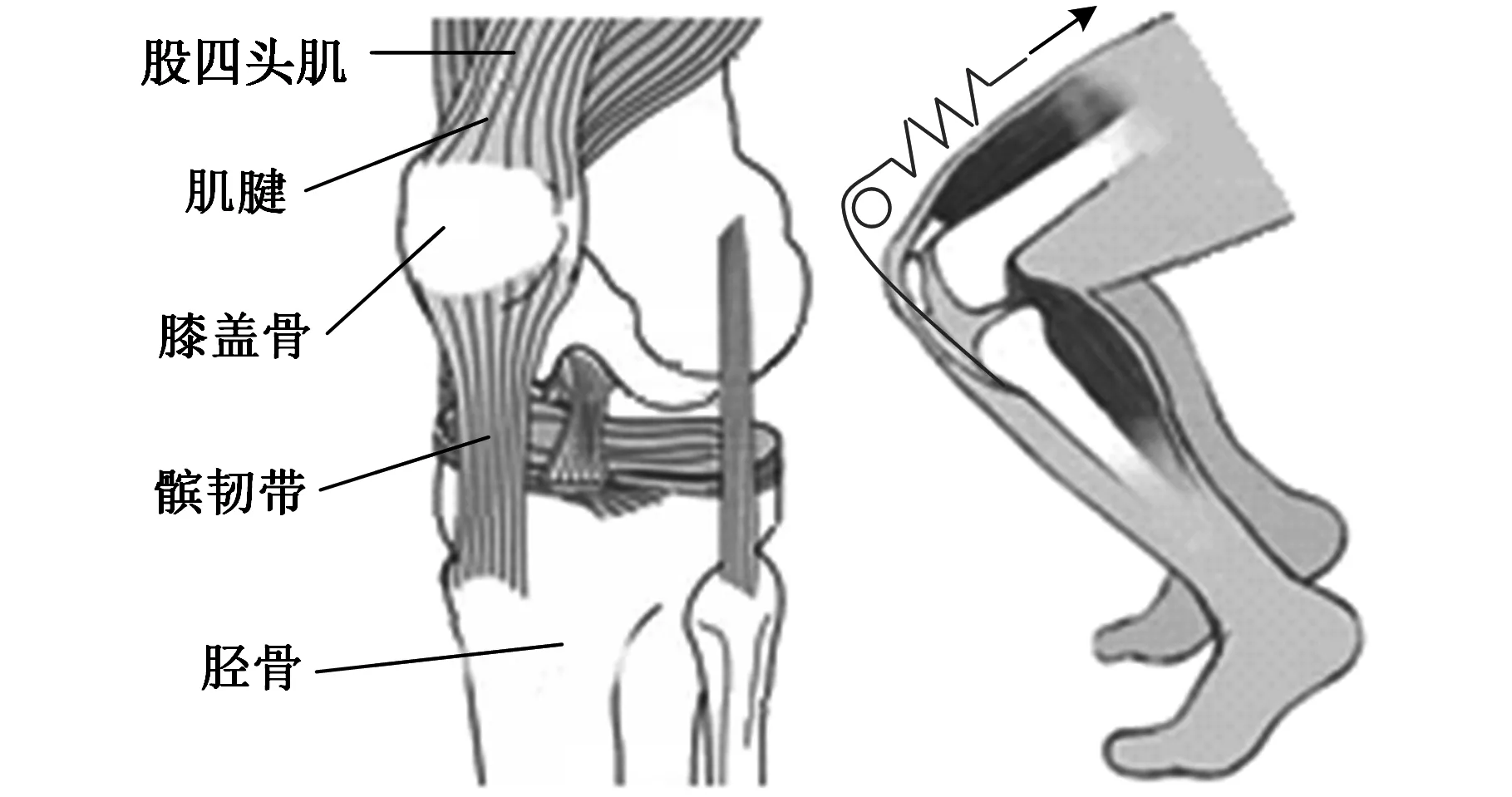
图1 人类膝关节结构图
仿照动物关节肌肉-筋腱组织,在机器人关节驱动器与被驱动机构间串联弹性元件,即构成了串联弹性驱动器(series elastic actuator,SEA)[17],将柔性、抗冲击性、能量储存释放等机理引入到关节中,既可以降低关节驱动受到外力冲击,又能减少能量消耗,降低控制精度要求[18-20]。
2 柔性关节设计
2.1串联弹性驱动器在关节上的应用
目前串联弹性驱动器应用在机器人关节主要分为直线型SEA和圆周型SEA两种:直线型SEA结构上通过驱动器的直线运动输出连接到弹性元件(压缩弹簧)实现关节的柔性输出,这种直线型SEA需要安装在两关节臂之间,限制了关节的灵活程度;圆周型SEA是在旋转型驱动器与旋转输出轴间串联弹性元件(压缩弹簧、卷簧等)来实现柔顺特性,圆周型SEA适用于电机驱动的关节型机器人上,相较于直线型SEA的优点是省去“旋转-直线-旋转”转换,结构紧凑,关节活动范围大,柔性参数易于设计。
通过以上对于直线型和圆周型SEA优缺点的分析,为达到结构紧凑、通用性强的特点,考虑到现有关节型机器人多为电机驱动型,故本文采用圆周型SEA作为柔性关节设计的基本结构。
2.2柔性输出机构刚度模型分析
本文设计的提供柔顺特性的柔性输出机构简图见图2,主要包括弹簧安装架、弹簧和输出盘。旋转驱动输入带动弹簧安装架转动,弹簧安装架压缩弹簧,弹簧推动输出盘转动输出扭矩,压缩弹簧作为弹性元件实现柔顺特性;4组8条弹簧对称布置,在实现双向柔顺的同时降低了对单一弹簧的参数要求。
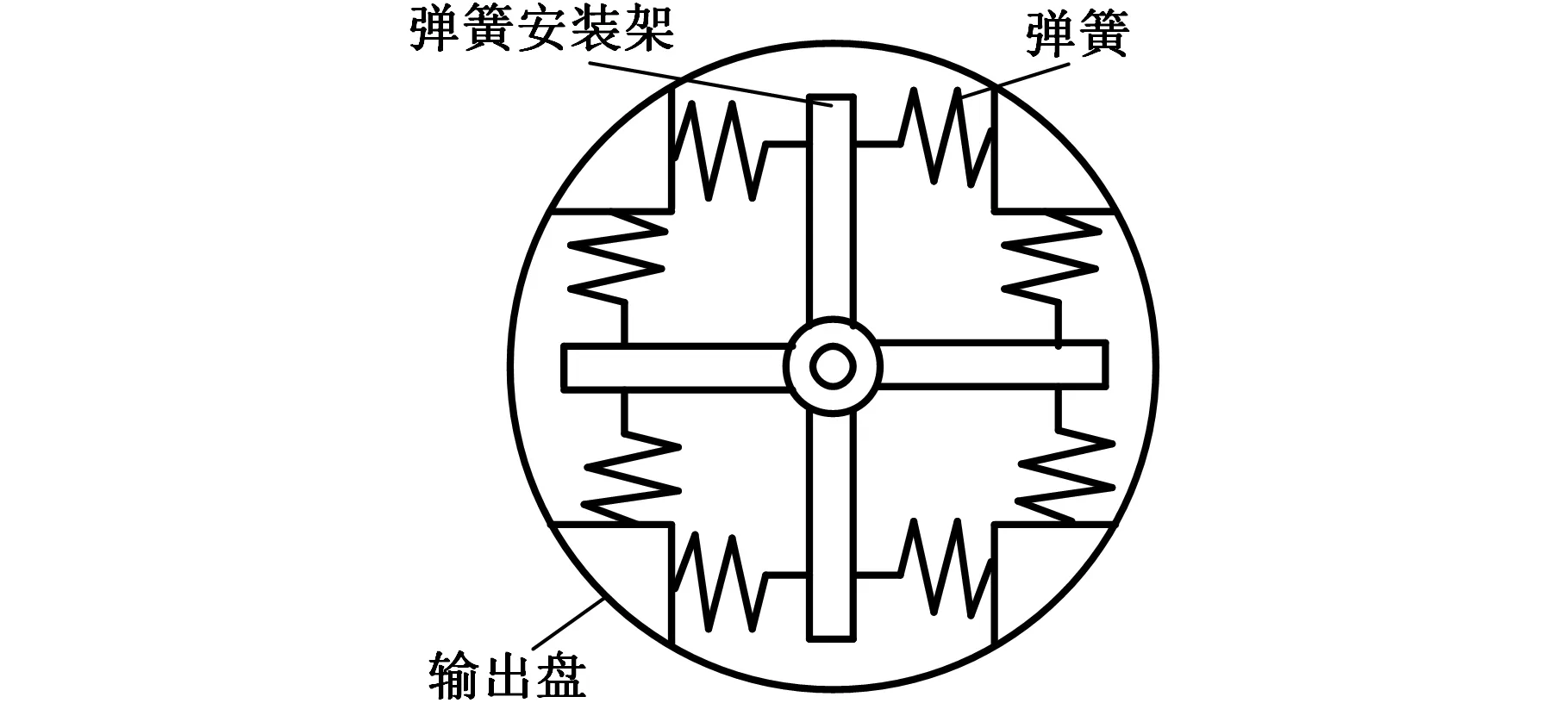
图2 柔性输出机构结构图
弹簧的刚度影响整个关节的刚度,决定了整个关节的柔顺特性,通过建立柔性输出机构刚度模型来分析关节等效刚度与单个弹簧刚度的关系。当输出轴固定,输入弹簧安装架旋转θs时,单根弹簧受力模型如图3所示。
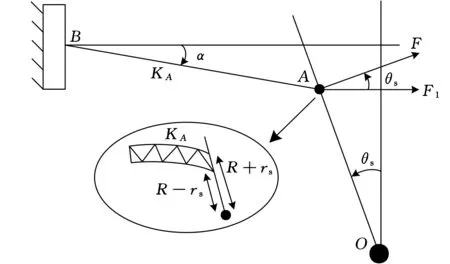
图3 单根弹簧受力机构简图
不考虑弹簧半径rs,弹簧与弹簧安装架接触点到旋转轴线距离为R,对称布置的弹簧一根压缩一根拉伸,形变量同为Δx,Δx=Rsinθs,单根弹簧的刚度为KA,产生的力矩为
T=2ΔxKARcosθs=2KAR2sinθscosθs
(1)
若考虑到弹簧的半径rs,则弹簧与弹簧安装架的受力并不是均匀的。远离旋转中心α的一端变形量最大,受力也最大,则一组弹簧产生力矩为
(2)
四组弹簧合力产生的总力矩为单组弹簧力矩的4倍,因此由弹簧轴向偏转引起的柔性关节的等效刚度Ks为
(3)
由式(3)可见:柔性关节等效刚度Ks与单个弹簧刚度KA成正比,且弹簧轴线到旋转中心距离越大,系数越大。
假设KA=20N/mm,R=35.5mm,rs=9mm,θs=0~0.2rad,利用MATLAB对关节刚度进行仿真,刚度曲线如图4所示。
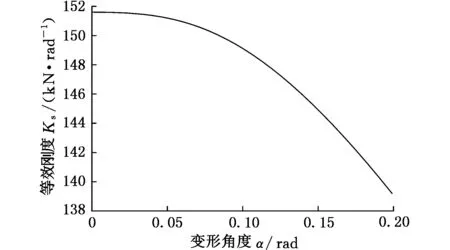
图4 关节刚度变化曲线
从图4纵坐标可以看出:关节等效刚度随关节中心轴转角的增大而略有减小,但在较小的偏转角度范围内可以认为柔性关节等效刚度没有变化。通过上述分析,结合实际需求选择适当刚度参数的弹簧,该柔性输出机构能够实现柔性输出功能。
2.3柔性关节整体结构设计
柔性关节机构简图见图5。当柔性关节工作时,电机连接同步带轮,通过同步带将动力传至第二同步带轮,进而将动力传至谐波减速器,谐波减速器连接上述柔性输出机构。采用同步带连接电机与减速器,使电机与谐波减速器、柔性输出机构平行放置,关节结构更加紧凑。
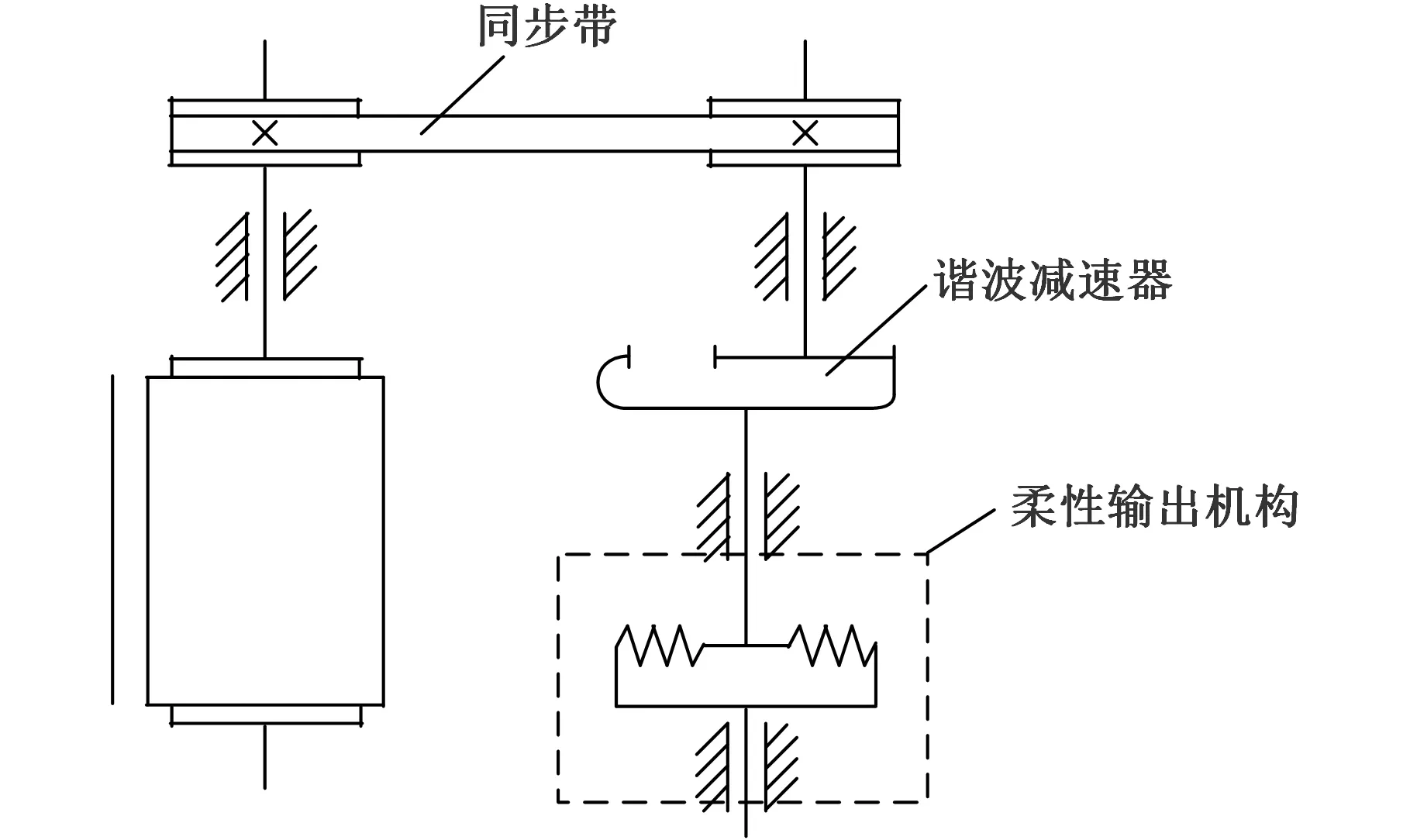
图5 柔性关节机构简图
由图6可知,柔性关节的电机安装在电机架上,电机扭矩通过同步带,谐波减速器传递到输出法兰轴,输出法兰轴与柔性输出结构相连。当输出法兰轴转动时带动弹簧安装架旋转,对位于弹簧安装架的同一枝上两侧的弹簧分别进行压缩和恢复,并通过弹簧的回复力带动输出盘转动,实现转矩和力的柔性输出。输出盘将动力传至关节连接板,输出动力,实现关节旋转运动。此外,输出法兰轴通过轴肩、交叉滚子轴承实现与关节连接板的相对转动;输出盘通过螺栓固接在关节连接板上,实现与输出法兰轴的相对转动。
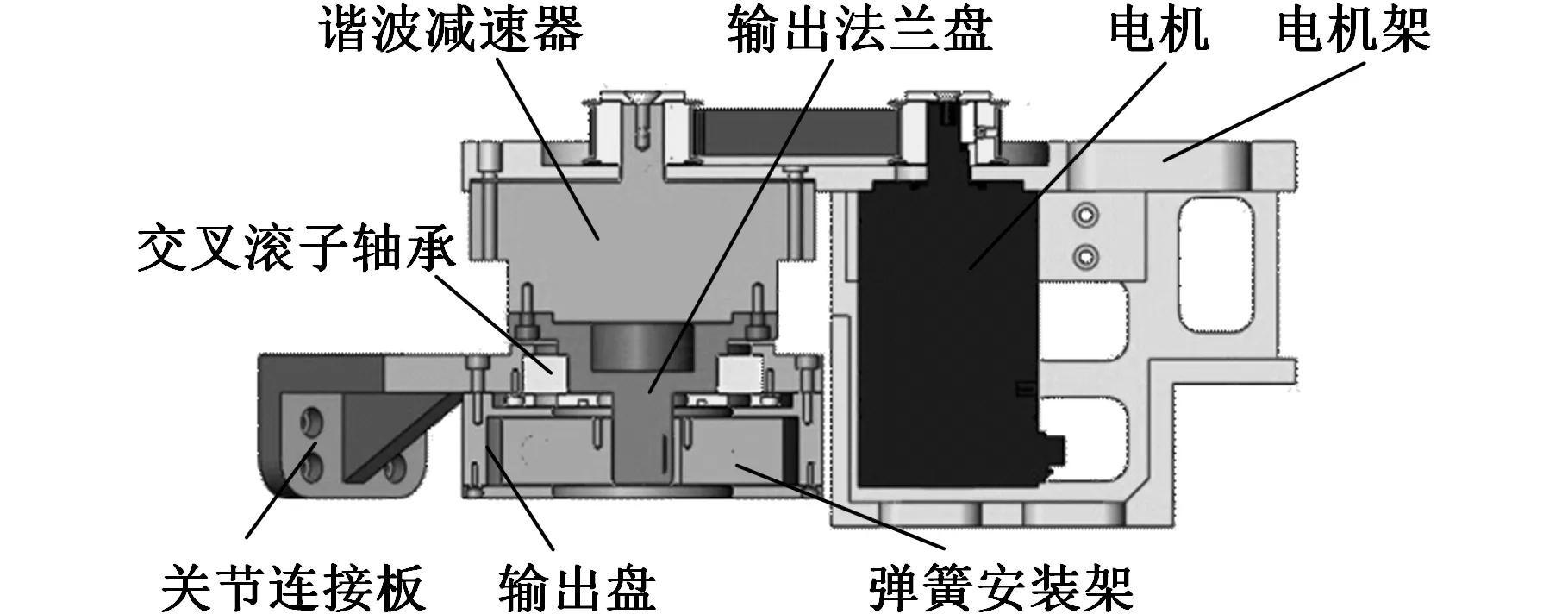
图6 柔性关节剖视图
3 柔性关节动力学模型的建立
依据经典控制理论,建立该柔性关节转矩输出控制模型,对柔性关节转矩输入输出特性进行分析,其控制模型如图7所示。 其中,闭环控制系统转矩输入为Td,输出转矩为Tl,PID控制器输入转矩为Te,PID控制器输出转矩为Ta,传动机构等效质量对柔性关节运动特性的影响不可忽略,即电机转子、同步带轮、法兰轴等传动部件等效到柔性输出机构前端,等效转动惯量为Ja。同时,考虑电机固有电气特性及传动机构摩擦,控制模型柔性机构前端添加阻尼ca。柔性关节输出转矩为Tl,负载转动惯量为Jl。
由图7可得动力学方程组为
(4)
式中,θl为负载旋转角度;θa为柔性元件前传动机构转动角度。
当驱动器末端固定,即θl=0时,则控制系统开环传递函数为
(5)
控制系统加入PID闭环控制参数KP、KI、KD后,控制模型为
(6)
在拉普拉斯域PID控制系统的闭环传递函数为
(7)
对闭环传递函数进行稳定性分析,将系统参数ca=0.3,KP=30,KI=0,KD=1.8,Ja=0.04kg·m2代入式(7)中,则闭环传递函数为
(8)
分别观察Ks为1.5、0.15kN/rad时传递函数的稳定性,闭环系统奈奎斯特曲线及阶跃响应曲线如图8、图9所示。

图8 闭环系统Nyquist图
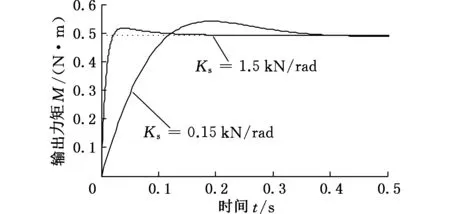
图9 闭环系统阶跃响应曲线
闭环系统奈奎斯特曲线均位于虚轴的右侧,与负实轴无交点,即系统具有较稳定的幅值阈度,阶跃响应曲线同样体现出闭环系统稳定快速特性。
4 柔性关节软件仿真
使用ADAMS软件对关节三维模型进行仿真分析,设定单根弹簧刚度KA=20N/mm,考虑到系统的摩擦会使SEA柔性关节的运动产生一定的衰减,因此本文设定SEA柔性关节的阻尼为0.01N·s/m,仿真模型如图10所示。
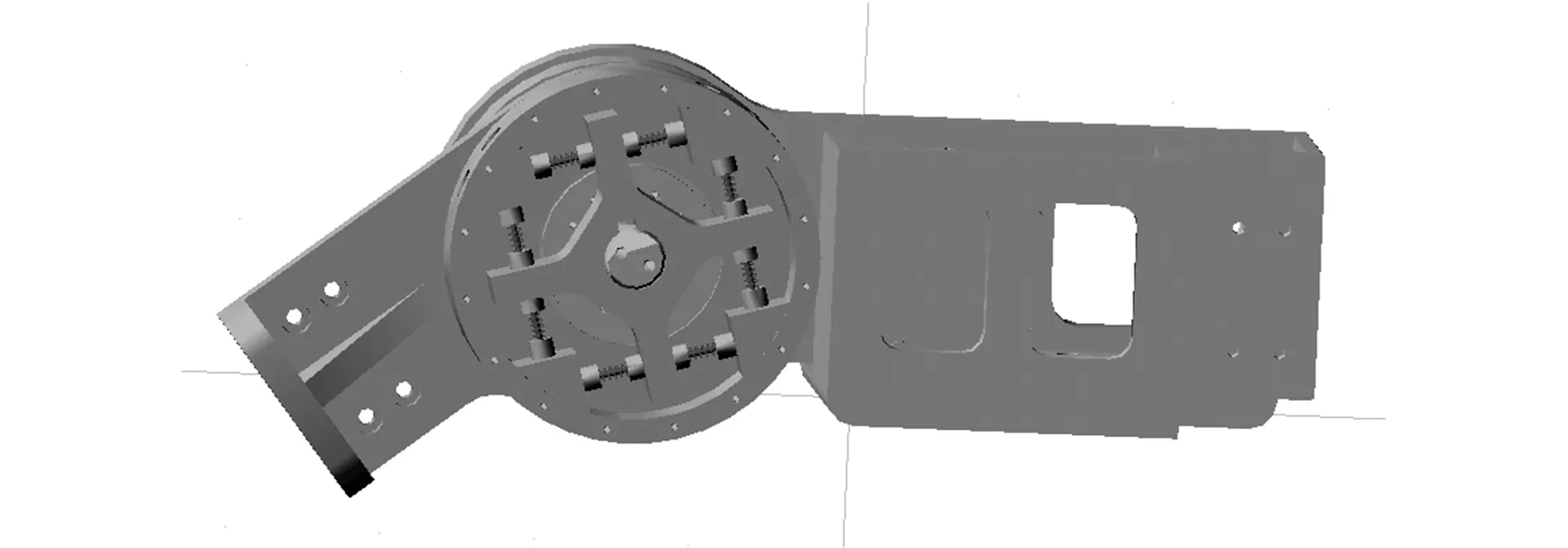
图10 柔性关节仿真模型
柔性关节是具有柔顺特性的机器人关节,其最大特点是抗冲击能力强。本文对SEA柔性关节在静止和运动时施加瞬时力以模拟机器人运行时意外受到的冲击力,并对SEA柔性关节的输出力和位置进行仿真分析。
SEA柔性关节在静止时对SEA柔性关节输出盘施加瞬时力,图11a所示为施加200N的力时关节受到的力仿真曲线,虚线表示施加的瞬时力、实线为关节受到的力。图11b所示为施加200N的力时关节角度的变化曲线。
(a)静态冲击-关节受力曲线

(b)静态冲击-关节角变化曲线图11 柔性关节静态冲击仿真曲线
在对柔性关节施加200 N的瞬时力时,SEA柔性关节稳定时间约为0.175 s,关节刚性驱动轴承受的冲击力最大值为140 N,小于外界的冲击力,可见柔性机构起到了缓冲保护作用。在位置仿真时,SEA柔性关节输出盘最大偏转角度为8.5°。
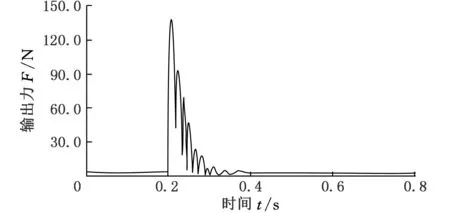
SEA柔性关节在运动时对SEA柔性关节输出盘施加200 N瞬时力,其仿真曲线如图12所示。图12a所示为施加200 N瞬时力时关节承受力的仿真曲线。图12b所示为施加200 N瞬时力时柔性关节输出角度的变化曲线。

(a)动态冲击-关节受力曲线
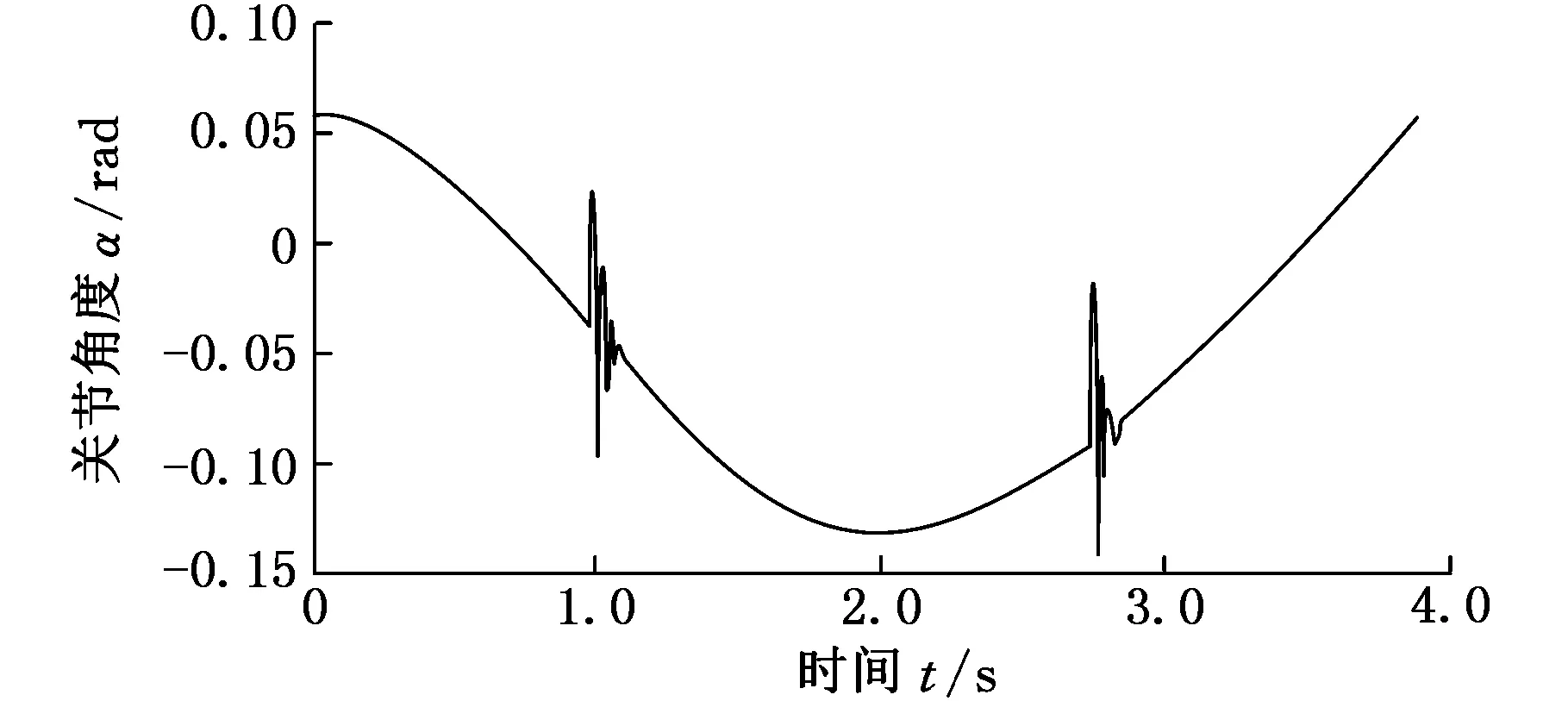
(b)动态冲击-关节角变化曲线图12 柔性关节动态冲击仿真曲线
从图12a可以看出,当SEA柔性关节受到冲击时,能以较快的速度稳定,稳定时间约为0.2 s。从图12b可以看出,SEA柔性关节在受到冲击时位置会发生较大振荡,然后衰减到平衡位置,能够与期望位置有较好的拟合。
通过对SEA柔性关节在静止和运动时受到瞬时接触力时的输出力和位置仿真分析,可初步得到结论:上述机器人柔性关节在受到冲击力作用时,能起到缓冲保护作用。
5 柔性关节样机系统及实验
本文设计的柔性关节样机如图13所示,柔性关节总质量为6.5 kg,尺寸为:218 mm×160 mm×120 mm。柔性关节驱动采用安川SGMJV-04ADE6S型号400 W交流伺服电机,其质量为1.3 kg,额定输出转矩为1.27 N·m,瞬时最大转矩为4.46 N·m,额定转速为3000 r/min,转子转动惯量为0.418×10-4kg·m2。搭配减速比为100的谐波减速器。受机械结构的影响,弹簧的最大行程为20 mm,弹簧外径小于23 mm,弹簧材料选用淬火回火碳素弹簧钢丝,其中τp=568.8 MPa,两端并紧并磨平,支承圈数各1圈,弹簧外径为18 mm,线径为3 mm,总圈数为6,自由高度为24.7 mm。

(a)柔性关节样机
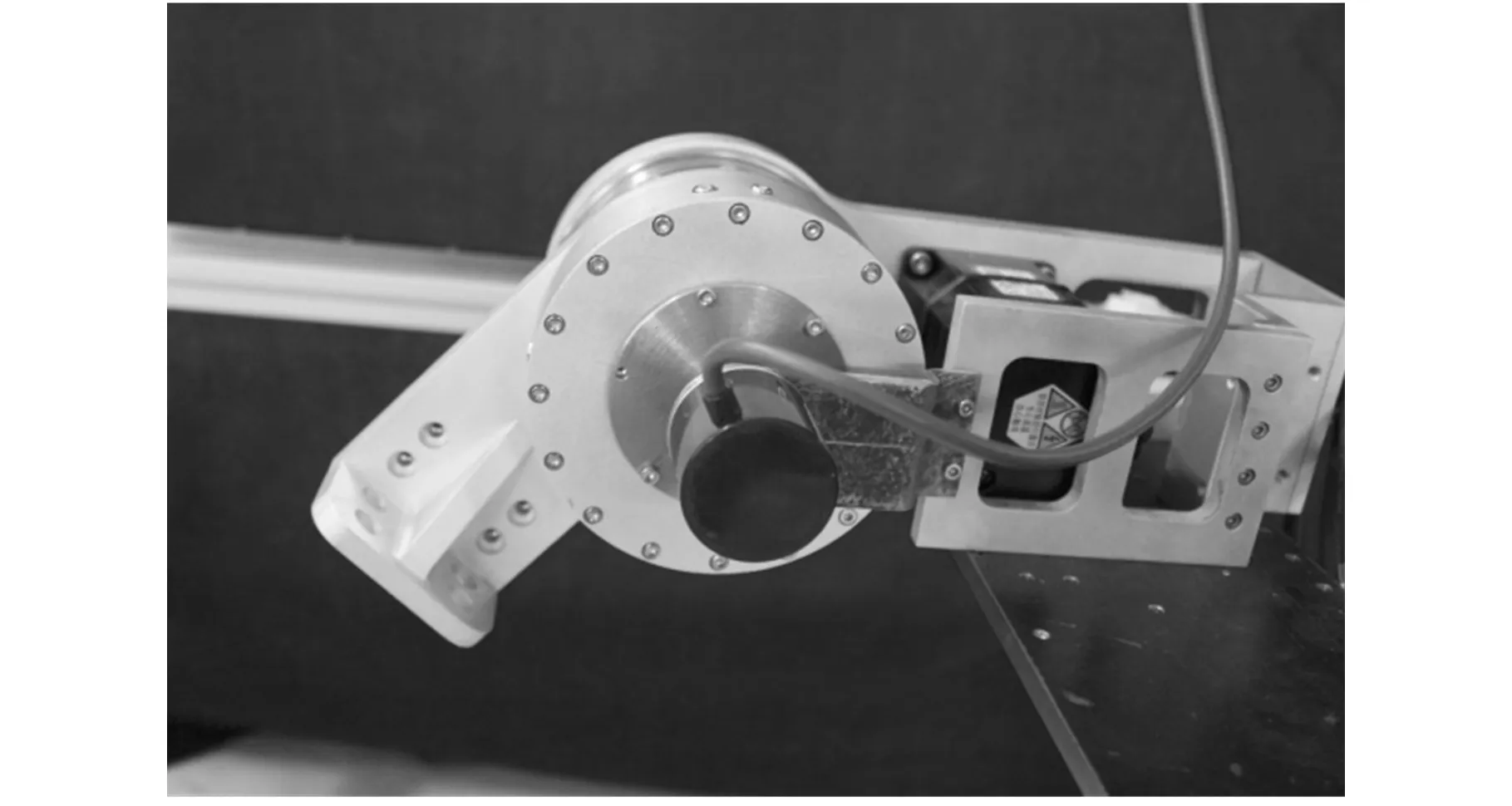
(b)柔性关节样机实验台图13 柔性关节样机实验系统
将柔性关节一端与实验台固定,在关节旋转轴上安装旋转编码器记录柔性关节输出角度,对柔性关节进行静止冲击实验,交流伺服电机上电并保持当前位置,使用橡胶锤敲击柔性关节末端,使用旋转编码器记录柔性关节输出盘转角。
图14是SEA柔性关节在末端自由并且静止时受到撞击力情况下输出盘的角度变化曲线,从图中可以看出SEA在受到撞击时能够快速稳定,时间约为0.7 s,输出盘最大转角约为6.8°,输出盘位置曲线变化规律基本与第2节ADAMS仿真结果一致。

图14 柔性关节输出转角曲线
柔性关节相比传统刚性关节优势在于:在未知环境中与障碍物发生碰撞,柔顺特性能够保护机器人本体损坏,其柔顺特性能够实现连续稳定的力矩输出。为验证该关节柔顺特性及其力矩输出能力,使用DAYSENSOR牌DYLY-102拉压力传感器,该传感器量程为300 N,精度为0.05%。设计如下实验(图15):柔性关节输出端连接摆腿,设置关节驱动电机匀速旋转一定角度,使摆腿在水平位置与压力传感器接触,通过压力传感器测量不同柔性变形下关节的柔顺力输出特性,压力传感器测量曲线见图16。
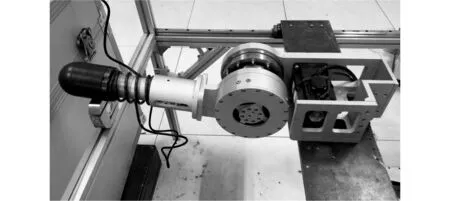
图15 关节柔性输出实验

图16 压力传感器测量曲线
初始阶段摆臂逐渐与传感器接触,压力曲线较为平缓,完全接触后,传感器压力与电机转角近似成正比关系,符合2.2节中得到的一定转角内关节刚度基本不变的结论。随着伺服电机继续旋转,关节柔性接近上限,刚性变大,随后电机停止转动。由此实验可以验证柔性关节具有良好柔顺特性。
6 结论
(1)以旋转型SEA为基础,对机器人柔性关节进行了紧凑型、模块化设计。
(2)建立了柔性关节刚度数学模型,分析确定了弹性单元与柔性关节的参数关系。
(3)建立了柔性关节PID闭环控制系统数学模型并推导出了闭环传递函数,代入系统参数验证了系统稳定性。
(4)通过软件仿真及样机实验,验证了该柔性关节的可行性。
[1]Wolf S,Hirzinger G.A New Variable Stiffness Design:Matching Requirements of the Next Robot Generation[C]//IEEE International Conference on Robotics and Automation. New York: IEEE,2008:1741-1746.
[2]Kong K,Bae J,Tomizuka M.A Compact Rotary Series Elastic Actuator for Human Assistive Systems[C]//IEEE/ASME Transactions on Mechatronics. Kaohsiung, 2012:288-297.
[3]Knox B T,Schmiedeler J P.A Unidirectional Series-elastic Actuator Design Using a Spiral Torsion Spring[J].Journal of Mechanical Design,2009,131(12):125001.
[4]Lens T,Kunz J,Stryk O V.Dynamic Modeling of the 4-DoF BioRob Series Elastic Robot Arm for Simulation and Control[C]//SIMPAR 2010. Darmstadt, 2010:411-412.
[5]尹鹏,李满天,郭伟,等.面向足式机器人的新型可调刚度柔性关节的设计及性能测试[J].机器人,2014,36(3):322-329.
Yin Peng,Li Mantian,Guo Wei,et al.Design and Testing of a Novel Joint with Adjustable Stiffness for Legged Robot[J].Robot,2014,36(3):322-329.
[6]Jafari A,Tsagarakis N G,Vanderborght B,et al.A Novel Actua-tor with Adjustable Stiffness (AwAS)[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway,USA: IEEE,2010:4201-4206.
[7]王勇利.基于电机控制的低阻抗弹性驱动器设计[D].哈尔滨:哈尔滨工业大学,2010.
[8]陈兵,骆敏舟,孙少明,等.基于仿生原理的节能减振类人机器人膝关节的设计[J].机器人,2014,36(2):218-223.
Chen Bing,Luo Minzhou,Sun Shaoming,et al. Design of Energy-saving and Vibration Damping Knee Joint of Humanoid Robot Based on Bionic Principles[J].Robot,2014,36(2):218-223.
[9]Alexander R M. The Maximum Forces Exerted by Animals[J]. Journal of Experimental Biology, 1985, 115(1):231-238.
[10]Kubo K, Kawakami Y, Fukunaga T. Influence of Elastic Properties of Tendon Structures on Jump Performance in Humans[J]. Journal of Applied Physiology, 1985, 87(6):2090-6.
[11]Wilson A M, Watson J C, Lichtwark G A. Biomechanics: A Catapult Action for Rapid Limb Protraction[J].Nature, 2003, 421(6918):35-36.
[12]马洪文,赵朋,王立权,等. 刚度和等效质量对SEA能量放大特性的影响[J]. 机器人,2012,34(3):275-281.
Ma Hongwen, Zhao Peng, Wang Liquan, et al. Effect of Stiffness and Equivalent Mass on Energy Amplification Characteristics of SEA[J].Robot, 2012,34(3):275-281.
[13]Narioka K, Hosoda K. Motor Development of an Pneumatic Musculoskeletal Infant Robot[C]//IEEE International Conference on Robotics and Automation. Shanghai, 2011:963-968.
[14]Hutter M, Siegwart R, Remy C D, et al. High Compliant Series Elastic Actuation for the Robotic Leg ScarlETH[C]//International Conference on Climbing and Walking Robots (CLAWAR). Paris, 2011:1-8.
[15]Arampatzis A,Brüggemann G P,Metzler V.The Effect of Speed on Leg Stiffness and Joint Kinetics in Human Running[J].Journal of Biomechanics,1999,32(12):1349-1353.
[16]Buehler M,Koditschek D E.Analysis of a Simplified Hopping Robot[C]//IEEE International Conference on Robotics and Automation.Piscataway, 1988:817-819.
[17]Pratt G A,Williamson M M.Series Elastic Actuators[C]//Proc. IEEE Int. Intelligent Robots and Systems. Pittsburg, 1995:399-406.
[18]马洪文,王立权,赵朋,等.串联弹性驱动器力驱动力学模型和稳定性分析[J].哈尔滨工程大学学报,2012,33(11):1410-1416.
Ma Hongwen,Wang Liquan,Zhao Peng,et al. Series Elastic Actuator Mechanical Model and Stability Analysis[J].Journal of Harbin Engineering University,2012,33(11):1410-1416.
[19]Seok S,Wang A,Chuah M Y,et al. Design Principles for Highly Efficient Quadrupeds and Implementation on the MIT Cheetah Robot[C]//2013 IEEE International Conference on Robotics and Automation. Karlsruhe: IEEE,2013:3307-3312.
[20]何福本,梁延德,孙捷夫,等.基于SEA的机器人仿肌弹性驱动关节研究[J].中国机械工程,2014,25(7):900-905.He Fuben,Liang Yande,Sun Jiefu,et al.Study on Elastically Actuated Joints of Robot for Mimicking Musculo-tendinous Functions Based on SEAs[J].China Mechanical Engineering,2014,25(7):900-905.
(编辑王艳丽)
Design and Analysis of a Rotary-type Robot Flexible Joint
Shi YanleiZhang MingluZhang XiaojunBai Feng
Hebei University of Technology,Tianjin,300132
According to the researches of the mechanism of flexibility of human knee joint, the animal musculo-tendinous tissue was modeled to design a suitable motor-driven rotary-type robot flexible joint. Then, comparative mechanism characteristics of the rotary type and linear type SEA(series elastic actuator) were analyzed, a flexible output mechanism with eight interaction compression spring was proposed as the core of the compliant joint, and based on this structure the relationship among joint structure parameters and output stiffness was calculated. To achieve the joint modularity, versatile, lighter and more compact, motor, reducer and flexible output mechanism centrally were installed in joints. Software simulation and tests on a prototype joint show that this joint has impact property and flexible output capacity and may be applied to various robots with respect to its structure design and functions.
robot; flexible joint; compact design; series elastic actuator
2015-11-23
国家自然科学基金资助项目(61503119)
TP242.6
10.3969/j.issn.1004-132X.2016.18.014
史延雷,男,1989年生。河北工业大学机械工程学院博士研究生。主要研究方向为机构学、机器人技术及应用等。张明路,男,1964年生。河北工业大学机械工程学院教授、博士研究生导师。张小俊(通信作者),男,1980年生。河北工业大学机械工程学院副教授。白丰,男,1988年生。 河北工业大学机械工程学院博士研究生。
