四足机器人液压驱动单元变刚度和变阻尼负载特性的模拟方法
2016-10-13巴凯先吴柳杰孔祥东
俞 滨 巴凯先 王 佩 吴柳杰 孔祥东,3
1.燕山大学,秦皇岛,0660042.浙江大学流体动力与机电系统国家重点实验室,杭州,3100003.河北省重型机械流体动力传输与控制实验室,秦皇岛,066004
四足机器人液压驱动单元变刚度和变阻尼负载特性的模拟方法
俞滨1,2,3巴凯先1王佩1吴柳杰1孔祥东1,3
1.燕山大学,秦皇岛,0660042.浙江大学流体动力与机电系统国家重点实验室,杭州,3100003.河北省重型机械流体动力传输与控制实验室,秦皇岛,066004
基于机理建模方法建立了液压驱动单元位置控制系统数学模型,针对不同环境结构下负载刚度和负载阻尼的动态变化特性,把位置控制环作为控制器内环,推导了一种变刚度和变阻尼负载特性的模拟方法。建立了负载特性模拟方法的仿真模型,并在液压驱动单元性能测试平台上进行了模拟方法的实验测试,研究了斜坡阶跃负载力和正弦负载力下变刚度和变阻尼负载特性的模拟效果。研究结果表明:设计的模拟方法能够较好地模拟环境刚度参数变化、阻尼参数变化,以及刚度参数和阻尼参数同时变化时的负载特性。
四足机器人;液压驱动单元;变刚度阻尼负载特性;负载特性模拟
0 引言
液压驱动相对于传统的电机驱动和气压驱动,具有体积小、输出功率大、响应快、精度高等优势,特别适合足式机器人的高性能要求,可以提高足式机器人对未知、非结构环境的适应能力,使其可应用于野外复杂环境下的探测、运输、救援等领域,是近年来各国机器人领域学者的研究热点[1-3]。美国波士顿公司成功研制了液压驱动型四足仿生机器人Big-Dog,Big-Dog出众的运动性能以及其在雪地、沙地、冰面、土地、瓦砾等各种负载接触环境下的适应能力,大大提高其军用和民用价值[4-5]。
该类液压驱动型四足仿生机器人每条腿一般有3~4个主动运动关节,各主动运动关节均由一个高集成性的液压驱动单元驱动[6-8]。对于该四足机器人常用的运动控制方法而言,各关节的液压驱动单元可采用高精度的位置控制[9-10],但在足端触地或接触障碍物时,如果继续采用位置控制会产生较大冲击,从而引起四足机器人的不稳定,甚至造成机身及其附带的电子设备的损坏,这时需将四足机器人某些关节的液压驱动单元切换为力伺服控制或者柔顺力控制。四足机器人足端接触的真实环境复杂多变,如何准确地模拟出等效至各液压驱动单元的负载特性,以用于验证液压驱动单元控制方法的有效性和鲁棒性,是需要解决的关键问题之一。
传统的负载力模拟方法及相应的多余力抑制方法主要用于提高已知负载力曲线下的负载模拟精度[11-12],而当面临接触环境参数变化时,如何较为准确地模拟出此时的负载特性,相关的研究成果并不多。多数学者在进行机器人控制研究时,主要的工作是将负载特性等效为典型力加载信号或已知的负载力时程曲线,在此基础上研究机器人液压控制系统的鲁棒性:Xu等[13]将学习控制方法和鲁棒控制方法结合在一起设计了一种新的鲁棒学习控制器,利用鲁棒控制方法保证系统全局渐进稳定、利用学习控制方法消除系统结构不确定的影响,使机器人具有良好的适应能力;Namvar等[14]对机器人控制性能影响最大的环境因素展开研究,在环境地形和刚度不确定的情况下,设计了一种针对环境不确定性的自适应控制器,使机器人能够很好地进行多种环境下的跟踪控制;Irawan等[15]研究了自适应阻抗控制的设计与变刚度调谐方法,该方法对机器人的控制方法设计起到了一定指导作用。而四足机器人在实际工作中足端接触的环境结构具有多样性,不同的环境结构对应着各液压驱动单元的负载特性亦不同。由于环境结构的多变性及复杂性,诸多学者提出将不同的环境结构近似简化为刚度和阻尼系统的参数变化,若能将这种刚度和阻尼参数的动态变化特性作为负载特性进行高精度模拟,可使液压系统的负载特性更加贴近实际工况,在此基础上进行机器人液压系统的控制方法研究及控制有效性验证,将更具针对性及工程实用性。
针对上述存在的问题,本文设计了一种基于液压驱动单元位置控制环的变刚度和变阻尼负载特性模拟方法。首先,建立液压驱动单元位置控制系统数学模型,阐述液压驱动单元性能测试实验平台的原理及组成;其次,将液压驱动单元接触的环境结构等效为一种变刚度和变阻尼负载特性,基于一种典型的负载特性与位置变化量关系式,设计一种变刚度和变阻尼负载特性模拟器;最后通过实验和仿真对比分析,验证变刚度、变阻尼负载特性模拟的可行性。
1 液压驱动单元位置控制系统
1.1液压驱动单元位置控制系统数学模型
液压驱动单元作为高性能四足仿生机器人各关节的驱动器,是机器人的核心部件之一,主要由小型对称伺服缸、流量伺服阀、力传感器和位移传感器集成,其三维装配图见图1。

图1 液压驱动单元三维装配图
采用机理建模的方法,基于液压系统滑阀压力-流量方程、流量连续性方程及伺服缸力平衡方程,可建立液压驱动单元位置控制系统框图见图2。
依据图2,采用MATLAB/Simulink中子模型功能进行封装,建立的液压驱动单元位置控制系统仿真模型如图3所示。
控制系统框图及仿真模型中的主要参数物理意义及初值如表1所示。
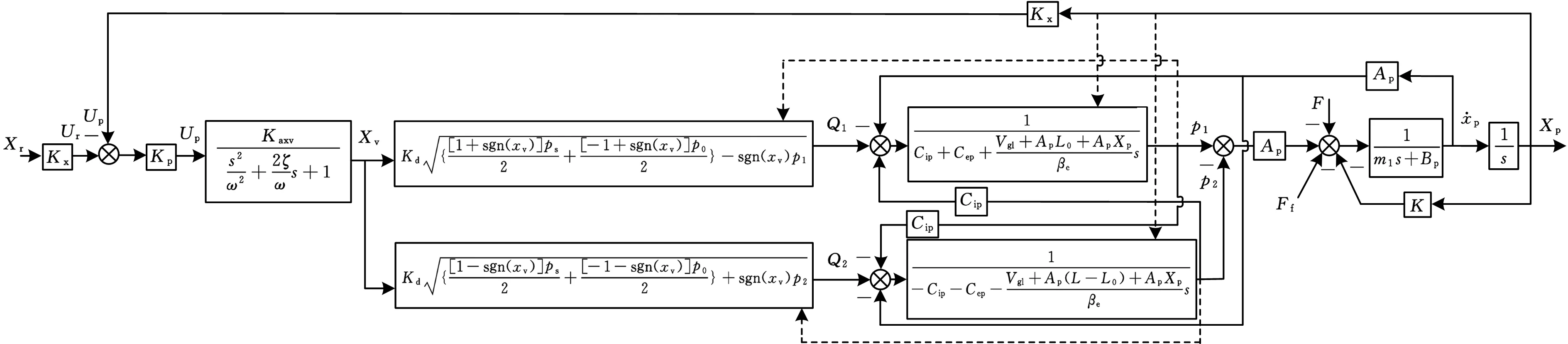
图2 液压驱动单元位置控制系统框图
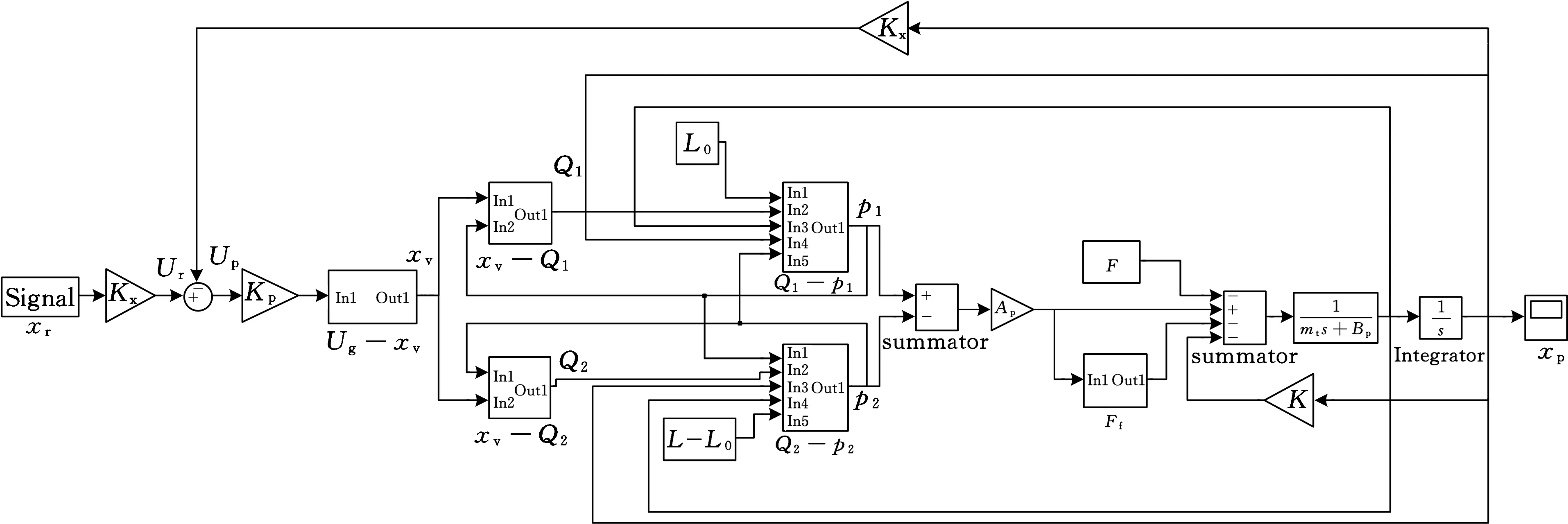
图3 液压驱动单元位置控制系统仿真模型
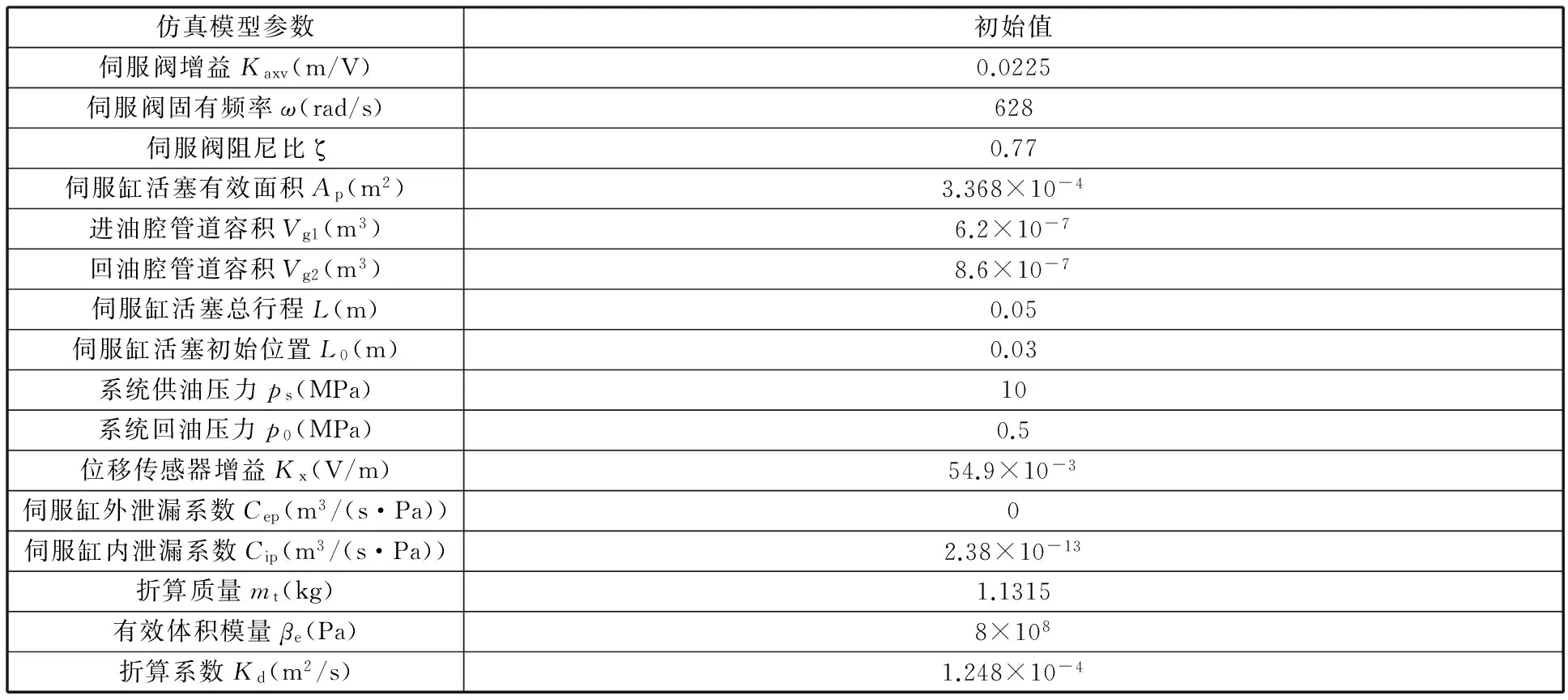
仿真模型参数初始值伺服阀增益Kaxv(m/V)0.0225伺服阀固有频率ω(rad/s)628伺服阀阻尼比ζ0.77伺服缸活塞有效面积Ap(m2)3.368×10-4进油腔管道容积Vg1(m3)6.2×10-7回油腔管道容积Vg2(m3)8.6×10-7伺服缸活塞总行程L(m)0.05伺服缸活塞初始位置L0(m)0.03系统供油压力ps(MPa)10系统回油压力p0(MPa)0.5位移传感器增益Kx(V/m)54.9×10-3伺服缸外泄漏系数Cep(m3/(s·Pa))0伺服缸内泄漏系数Cip(m3/(s·Pa))2.38×10-13折算质量mt(kg)1.1315有效体积模量βe(Pa)8×108折算系数Kd(m2/s)1.248×10-4
1.2液压驱动单元性能测试实验平台
液压驱动单元动态性能的好坏直接影响着四足机器人整体运动性能,为了更好地研究液压驱动单元的力控制方法和位置控制方法,搭建了专用的液压驱动单元性能测试实验平台,其液压原理示意图见图4。

图4 四足机器人液压驱动单元性能测试实验系统组成示意图
图4所示的实验系统采用了航空航天、船舶、工程机械等诸多领域广泛应用的电液力模拟器原理[16],由两套相同的液压驱动单元对顶安装。左侧液压驱动单元采用力闭环控制,称为力控系统;右侧液压驱动单元在位置闭环控制的基础上设计变刚度阻尼特性,称为负载特性模拟系统,用于模拟负载特性的动态变化;力控系统和负载特性模拟系统之间通过力传感器刚性连接。液压驱动单元性能测试实验平台实物照片及控制器如图5所示。

(a)性能测试实验系统对顶机构

(b)dSPACE控制器及工控机图5 液压驱动单元性能测试实验系统
2 液压驱动单元变刚度和变阻尼负载特性模拟方法
2.1负载特性模拟要求
将环境结构特性等效为刚度、阻尼参数可变的负载特性,则图4可等效为图6,即需要使图4右侧液压驱动单元模拟出图6中变刚度和变阻尼的负载特性。
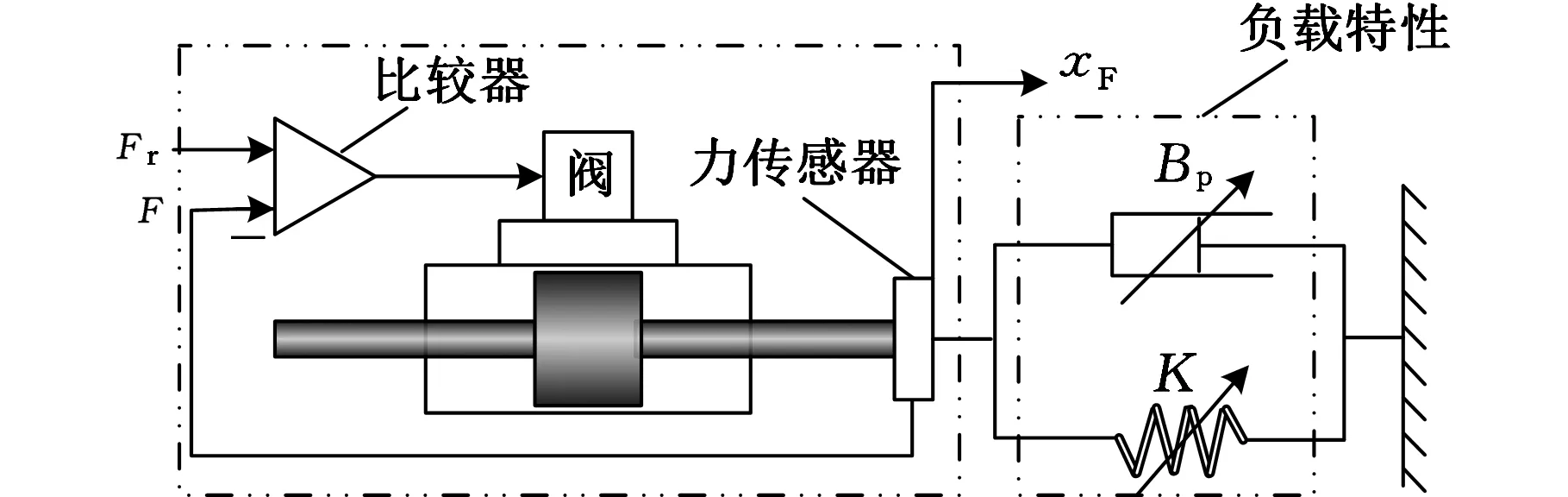
图6 力控系统与负载特性的关系示意图
由于力传感器质量、液压缸活塞质量以及油液折合至活塞上的质量均较小,忽略由此产生的惯性力,则以图中力传感器为质心,可建立如下动力学方程:
(1)
式中,Bp为活塞及负载黏性阻尼系数;F为力传感器实测力;K为负载刚度;xF为力控系统活塞位移变化。
一般而言,将某一真实的环境结构等效为刚度和阻尼,其刚度和阻尼参数必然是动态变化的,其值的大小通常与位移的压缩量有关,且随着位移压缩量的增大,相应的刚度和阻尼参数增大。以某一种典型环境下的刚度和阻尼参数变化为例,其负载刚度K与位移变化量xF成3次指数关系,其表达式为
(2)
式中,K0为负载刚度初始值,N/m;M为负载刚度变化系数。
设定某环境下负载阻尼Bp与位移变化量xF成二次指数关系,其表达式为
(3)
式中,Bp0为负载阻尼初始值,N·s/m;N为负载阻尼变化系数。
联立式(1)~式(3),将位移变化量xF列为状态变量,则可将式(1)转化为
(4)
式(4)表征了变刚度和变阻尼负载特性下力与位移变化量的动力学关系,由此可建立力与位移变化量的传递框图,如图7所示。
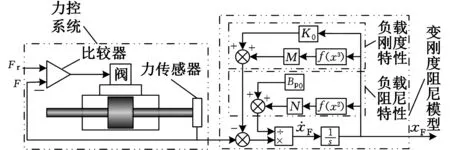
图7 力与位移变化量的传递框图
2.2负载特性模拟原理
由图7可知,若要准确地模拟出负载刚度和阻尼特性,当模拟系统受到力F的作用时,其位移应变化xF。在负载特性模拟系统中引入图7的变刚度和变阻尼模型,可得液压驱动单元变刚度和变阻尼负载特性的模拟原理示意图,如图8所示。

图8 变刚度阻尼负载特性的模拟原理示意图
图8中,在负载特性模拟时,xF相当于位置修正量给定,而由力F引起的真实变化量为实际位移响应xp与位移给定xr之差,因此,变刚度阻尼模型的形变量输入应为xp-xr。该负载特性模拟系统对应的部分参数值如表2所示。

表2 负载特性模拟对应的参数初值表
2.3负载特性模拟控制器设计
在图3液压驱动单元位置控制系统仿真模型的基础上,结合图7和图8搭建负载特性模拟系统的仿真模型,如图9所示。
在实验过程中,搭建负载特性模拟系统的控制界面如图10所示。为消减两液压驱动单元固连的多余力,在控制中引入了参数自整定的多余力抑制方法。
为验证本文设计方法在刚度、阻尼参数同时变化时的有效性,并使验证结果更清晰且更具说服力,在后续分析中先进行单因素分析,即先分别分析刚度模拟和阻尼模拟的模拟效果,再分析整体模拟效果。由于本文模拟的刚度和阻尼值均为液压驱动单元输出位移的函数,而刚度和阻尼值又无法直接测得,因此刚度和阻尼的理论计算值和实际模拟值均需通过相应的数据处理求得。对于刚度而言,其理论计算值应满足式(2),而其实际模拟值反映的是液压驱动单元在受力时抵抗变形的能力,需用实测负载力F除以实际变化量xp-xr计算得出,通过理论计算值和实际模拟值的对比,可获得刚度模拟效果。对于阻尼而言,其理论计算值应满足式(3),而由于液压驱动单元的行程很小,单独测量阻尼易导致系统失速,且实际的接触环境产生的负载力一般以刚性力为主,不会存在单纯阻尼负载的情况,因此,阻尼模拟的仿真和实验是在刚度 K=1MN/m条件下完成的,通过位移变化量的变化速率间接观察阻尼模拟的有效性。

图9 负载特性模拟系统MATLAB/Simulink仿真模型

图10 负载特性模拟系统的控制界面
3 液压驱动单元负载特性模拟效果
3.1斜坡加载下变刚度模拟效果
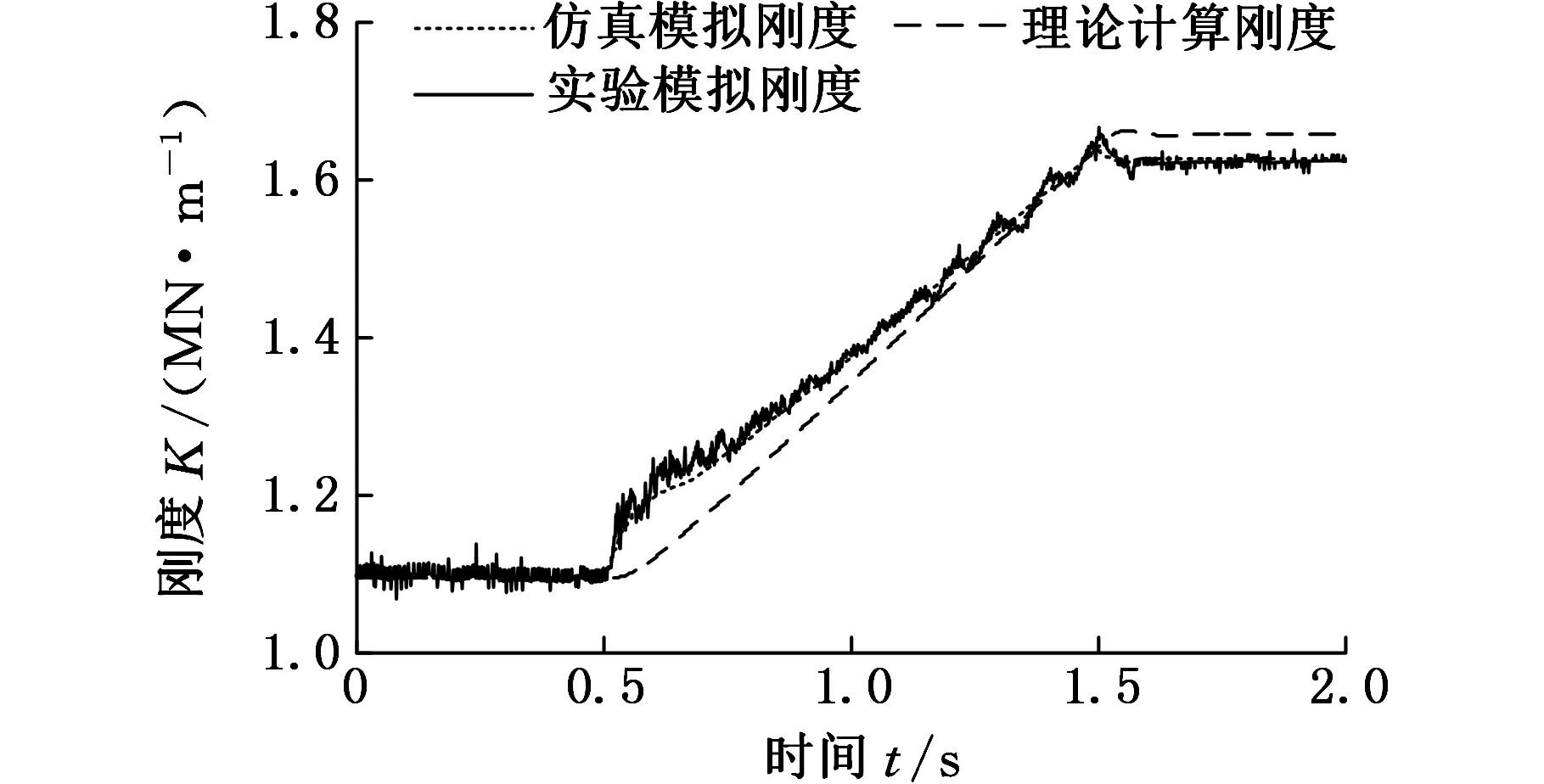
将初始值为500N、终值为1500N、斜坡斜率分别为1000N/s和2000N/s的斜坡负载力施加至负载特性模拟系统,负载特性模拟系统的位移响应曲线、理论计算刚度和仿真模拟刚度对比曲线如图11所示。由图11分析可知,位移响应实验曲线、刚度实验曲线的变化趋势与仿真结果相同。其位移变化量均与仿真值相差0.2mm左右,实验模拟的斜率与仿真结果相差不大;两组理论计算刚度与实验模拟刚度终值相差最大值为0.007MN/m,最小值为0.002MN/m,在跟踪过程中理论计算刚度与实际模拟刚度最大误差分别为0.1MN/m、0.142MN/m,可见该刚度模拟方法对斜坡加载是可行的且具有一定的模拟精度。

(a)1000 N/s斜坡加载下的位移响应曲线
(b)1000 N/s斜坡加载下理论计算刚度与仿真模拟刚度曲线

(c)2000 N/s斜坡加载下的位移响应曲线

(d)2000 N/s斜坡加载下理论计算刚度与仿真模拟刚度曲线图11 斜坡加载下变刚度模拟仿真曲线
通过仿真和实验曲线也可以发现如下问题:①理论计算刚度滞后于实际模拟刚度,这是由于两者的计算方法不同,由式(2)可知,理论计算刚度是位移变化量的函数,而实际模拟刚度是力传感器实测加载力和位移变化量的函数,由于位移变化是由加载力引起的,因此位移变化量滞后于加载力,这是导致理论计算刚度值滞后于实际模拟刚度值的主要原因;②随着加载频率的增大,理论计算刚度逐渐变小,而实际模拟刚度逐渐增大,这是由于实际的检测位移变化存在一定滞后性,加载频率越大,滞后越明显,理论计算刚度与位移变化量成三次指数关系,而实际模拟刚度则与位移成倒数关系。
3.2阶跃加载下变阻尼模拟效果
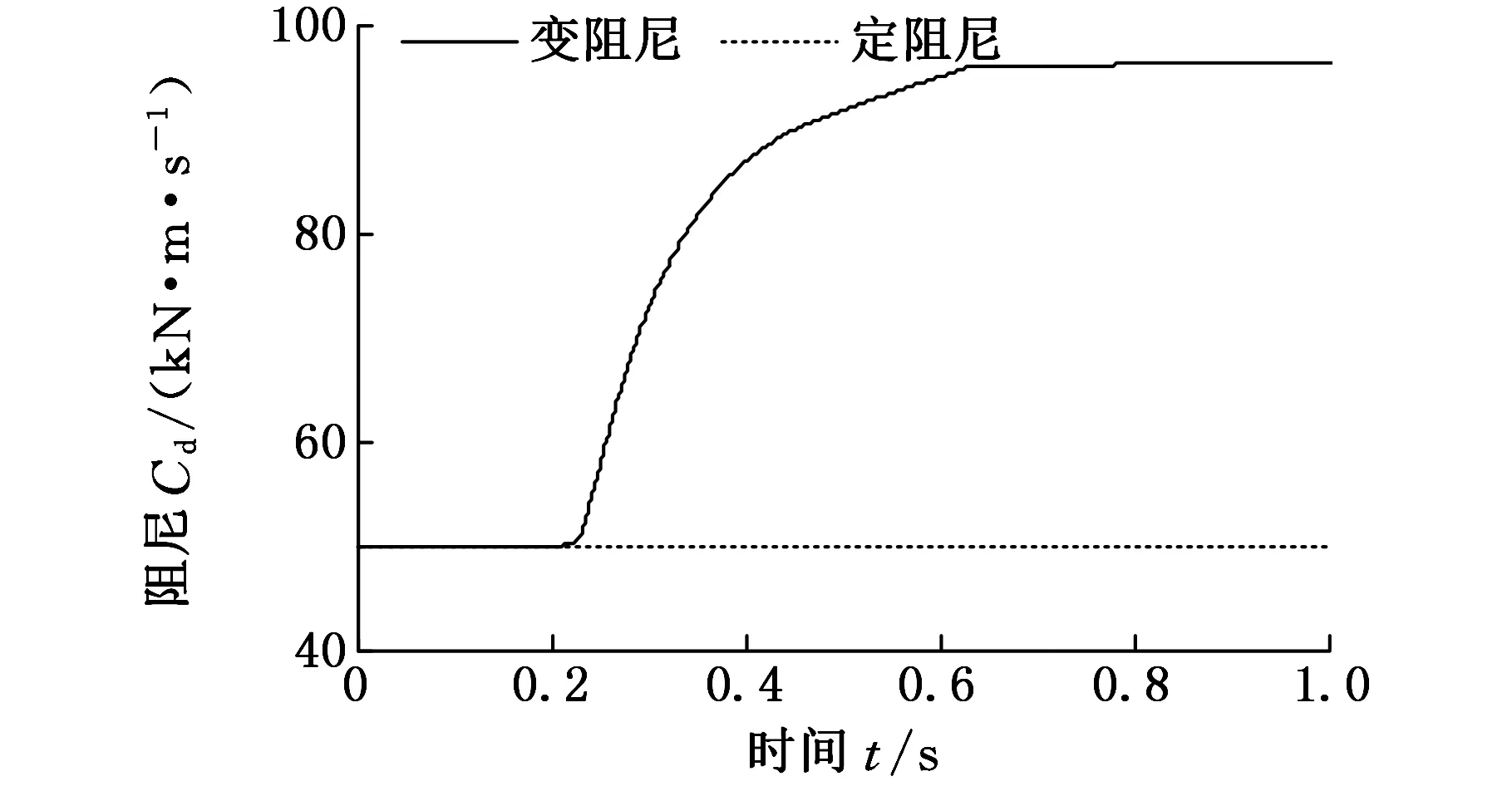
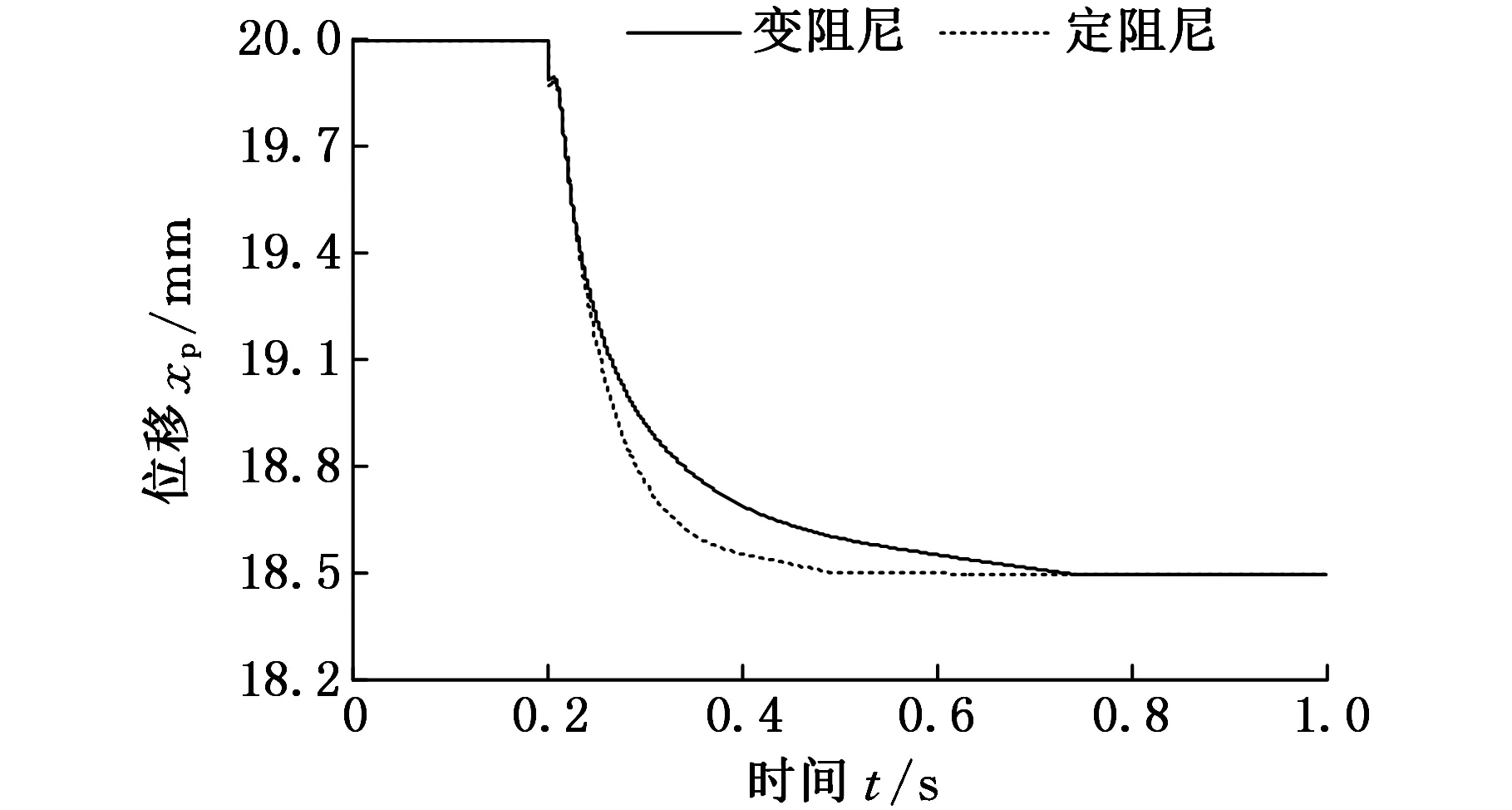
将幅值F=500N、1000N和1500N的阶跃加载力施加给负载特性模拟系统,负载特性模拟系统的位移响应仿真曲线和理论计算阻尼曲线与定阻尼的位移响应仿真曲线进行对比,结果如图12~图14所示,其对应的实验曲线如图15~图17所示。

(a)位移响应曲线

(b)阻尼曲线图12 500 N阶跃加载下位移曲线与阻尼曲线(仿真)

(a)位移响应曲线
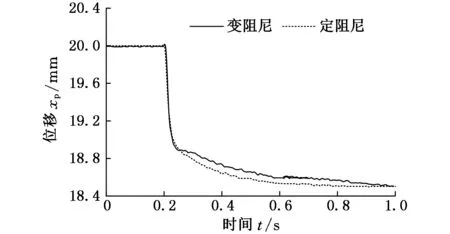
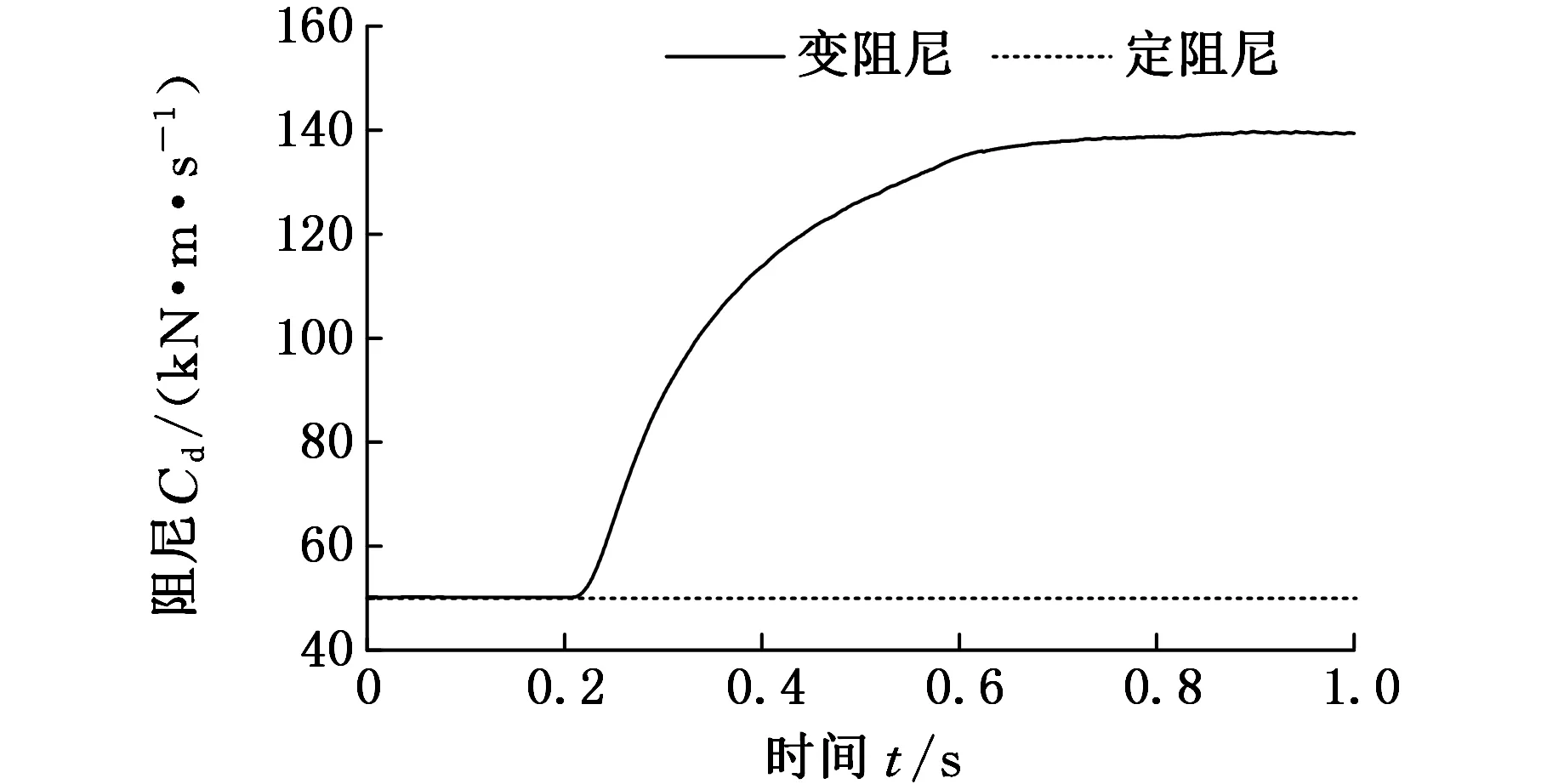
(b)理论计算阻尼与定阻尼曲线图13 1000 N阶跃加载下位移曲线与阻尼曲线(仿真)
(a)位移响应曲线

(b)理论计算阻尼与定阻尼曲线图14 1500 N阶跃加载下位移曲线与阻尼曲线(仿真)
由图12~图14可以看出,在定刚度条件下,随着负载力幅值的增大,负载特性模拟系统的位移响应速度变慢,达到稳态所需的时间变长,分别为273ms、380ms和533ms,与其对应的定阻尼达到稳态所需时间分别为260ms、284ms和298ms,且当负载力越大时变阻尼作用效果越明显。

(a)位移响应曲线

(b)理论计算阻尼与定阻尼曲线图15 500 N阶跃加载下位移曲线与阻尼曲线(实验)

(b)理论计算阻尼与定阻尼曲线图16 1000 N阶跃加载下位移曲线与阻尼曲线(实验)
由图12~图17对比分析可知,位移响应实验曲线与仿真结果相同。在定刚度条件下,负载力幅值越大,变阻尼效果越明显,且阻尼的增大阻碍了液压驱动单元位移响应的快速性,验证了变阻尼的模拟效果。
3.3典型加载下变刚度和变阻尼模拟效果
对负载特性模拟系统施加如图18a所示的斜坡阶跃负载力,并通过力传感器检测实际负载力曲线如图18b所示,负载特性模拟系统的位移响应仿真曲线和实验曲线如图19所示。
(a)位移响应曲线
(b)理论计算阻尼与定阻尼曲线图17 1500 N阶跃加载下位移曲线与阻尼曲线(实验)
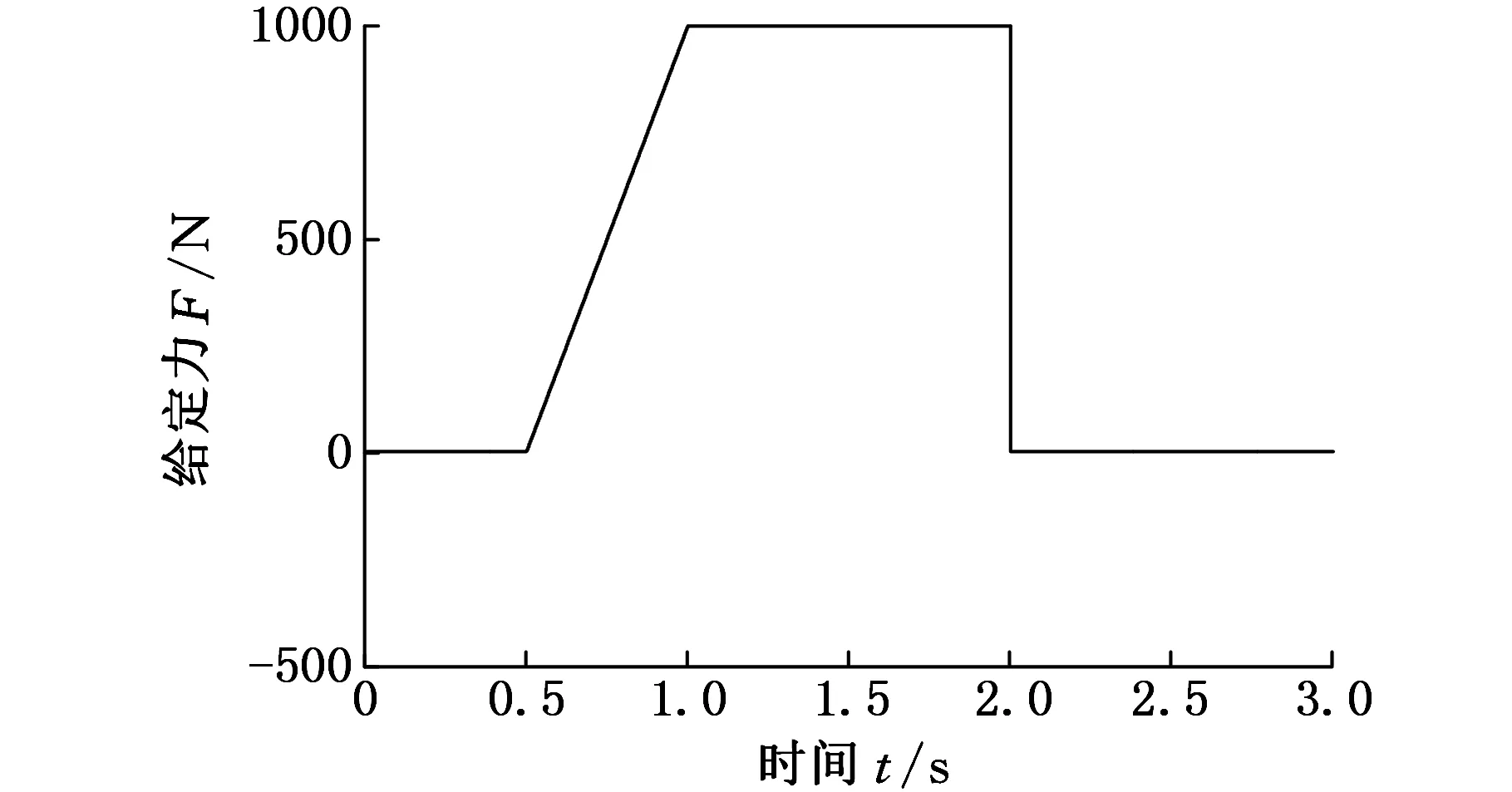
(a)斜坡阶跃加载给定负载力仿真曲线
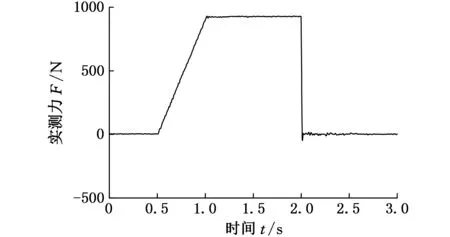
(b)斜坡阶跃加载给定负载力实测曲线图18 斜坡阶跃负载力曲线
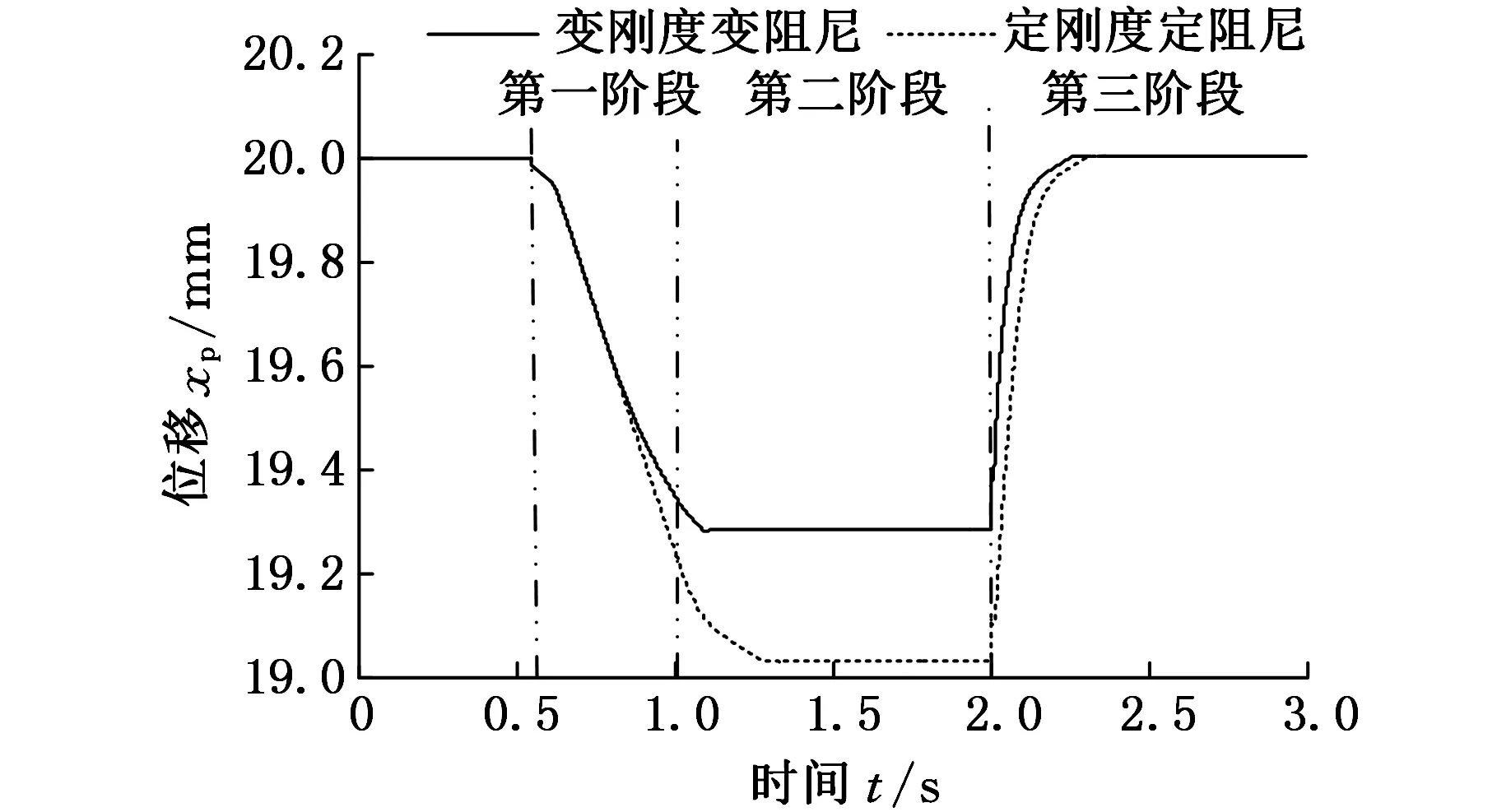
(a)斜坡阶跃加载位移响应仿真曲线
(b)斜坡阶跃加载位移响应实验曲线图19 斜坡阶跃加载下变刚度和变阻尼模拟效果
由图19可以看出,在斜坡阶跃加载力作用下负载特性模拟系统位移曲线在第一阶段从重合到逐渐分离,达到稳态的时间分别为531 ms和1077 ms,响应时间有差异是由于两者的负载刚度和阻尼不同;第二阶段稳定在不同位置,其位移形变量分别为0.72 mm和0.95 mm,位移形变量存在差异是由于两者的负载刚度不同;第三阶段阶跃力瞬间撤去,变刚度变阻尼和定刚度定阻尼位移仿真曲线变化趋势一致,实验曲线有细微差别。在斜坡阶跃加载力作用下,变刚度和变阻尼模拟同时起了作用。
4 结论
(1)斜坡加载力下的负载刚度模拟效果表明:该变刚度的模拟方法模拟出了负载刚度特性的变化,且实验效果和仿真效果相近,变刚度的模拟方法是可行的。给出了理论计算刚度与实际模拟刚度产生差异的原因。
(2)阶跃加载力下的负载阻尼模拟效果表明:变阻尼下的位移响应曲线均滞后于定阻尼的位移响应曲线,可见变阻尼的模拟方法起到了阻碍液压驱动单元位移响应快速性的作用。
(3)斜坡阶跃加载力下的变刚度变阻尼负载特性模拟效果表明:即使刚度和阻尼参数与加载力产生的形变量同时成非线性的函数关系,设计的模拟方法仍能够较好地模拟刚度和阻尼参数的动态变化,且具有较高的模拟精度。
[1]Semini C, Tsagarakis N,Guglielmino E, et al. Design of HyQ-A Hydraulically and Electrically Actuated Quadruped Robot[J]. Proceedings of the Institution of Mechanical Engineers Part I: Journal of Systems and Control Engineering, 2011, 225(6):831-849.
[2]孔祥东,俞滨,权凌霄,等.对四足仿生机器人液压驱动单元轨迹灵敏度分析[J].机械工程学报,2013,49(14):171-175.Kong Xiangdong, Yu bin, Quan Lingxiao, et al. Trajectory Sensitivity Analysis of Hydraulic Drive Unit of Quadruped Bionic Robot[J]. Chinese Journal of Mechanical Engineering, 2013, 49(14):171-175.
[3]Vo G L, Koo L M, Duc T T, et al. Sensingand Control of Quadruped Walking and Climbing Robot Over Complex Environment[C]//International Conference on Intelligent Robots and Systems, Acropolis Convention Center. Nice, France, 2008:3884-3889.
[4]丁良宏,王润孝,冯华山,等.浅析BigDog四足仿生机器人[J].中国机械工程,2012,23(5):505-514.
Ding Lianghong, Wang runxiao, Feng huashan, et al. Brief Analysis of a BigDog Quadruped Robot[J]. Chinese Journal of Mechanical Engineering, 2012, 23(5):505-514.
[5]Playter R, Buehler M, Raibert M. Bigdog[C]//Proceedings of SPIE. San Jose, USA, 2006:6320-6323.
[6]孔祥东,俞滨,权凌霄,等.四足机器人对角小跑步态下液压驱动单元位置伺服控制特性参数灵敏度研究[J].机器人,2015,37(1):63-65.Kong Xiangdong, Yu Bin, Quan Lingxiao, et al. Characteristic Parameters Sensitivity of Position Servo Control for Hydraulic Drive Unit of a Quadruped Robot in Trotting Gait[J]. Robot, 2015,37(1):63-65.
[7]李满天,蒋振宇,郭伟,等.四足仿生机器人单腿系统[J].机器人,2014,36(1):21-28.
Li Mantian, Jiang Zhenyu, Guo Wei, et al. Leg Prototype of a Bio-inspired Quadruped Robot[J]. Robot, 2014,36(1):21-28.
[8]Kong Xiangdong,Ba Kaixian, Yu Bin, et al. Trajectory Sensitivity Analysis of First Order and Second Order on Position Control System of Highly Integrated Valve-controlled Cylinder[J]. Journal of Mechanical Science and Technology, 2015,29(10):4447-4466.
[9]蒋振宇. 基于液压驱动的四足机器人对角小跑步态控制研究[D]. 哈尔滨:哈尔滨工业大学,2014.
[10]Kong Xiangdong, Yu Bin, Quan Lingxiao, et al. Nonlinear Mathematical Modeling and Sensitivity Analysis of Hydraulic Drive Unit[J]. Chinese Journal of Mechanical Engineering, 2015,28(5):999-1011.
[11]Quan Lingxiao, Zhang Wei, Yu Bin, et al. Decoupling Control Research on Test System of Hydraulic Drive Unit of Quadruped Robot Based on Diagonal Matrix Method[J]. Intelligent Control and Automation, 2013, 4(3):2320-2327.
[12]张伟. 四足机器人液压驱动单元负载模拟系统多余力抑制研究[D]. 秦皇岛:燕山大学,2013.
[13]Xu J X, Viswanathan B, Qu Z H. Robust Learning Control for Robotic Manipulators with an Extension to a Class of Non-linear Systems[J]. International Journal of Control, 2000, 73(10):858-870.
[14]Namvar M, Aghili F. Adaptive Force Control of Robots in Presence of Uncertainty in Environment[C]//Proceedings of the 2006 American Control Conference. Minneapolis Minnesota, USA, 2006:3253-3258.
[15]Irawan A, Ohroku H , Akutsu Y, et al. Adaptive Impedance Control with Compliant Body Balance for Hydraulic-actuated Hexapod Robot[C]// 10th International Conference on Motion and Vibration Control. Tokyo, Japan, 2010:1-9.
[16]Jiao Z X, Gao J X, Hua Q, et al. The Velocity Synchronizing Control on the Electro-hydraulic Load Simulator[J]. Chinese Journal of Aeronautics, 2004, 17(1):39-46.
(编辑王艳丽)
Simulation Method of Variable Stiffness and Damping Load Characteristics on Hydraulic Drive Unit of a Quadruped Robot
Yu Bin1,2,3Ba Kaixian1Wang Pei1Wu Liujie1Kong Xiangdong1,3
1.Yanshan University,Qinhuangdao,Hebei,066004 2.State Key Laboratory of Fluid Power and Mechatronic Systems(Zhejiang University),Hangzhou,310000 3.Hebei Provincial Key Laboratory of Heavy Machinery Fluid Power Transmission and Control,Qinhuangdao,Hebei,066004
The position control system mathematic and simulation model of HDU was established by the mechanism modeling method. A variable load stiffness and load damping characteristics simulation method was derived through the position control loop as controller inner loop, considering the dynamic characteristics of the stiffness and the load damping under different environment structures. The simulation model for load characteristics was established. Then, the experimental test of simulation method was conducted on the HDU performance test platform. During the test, the stiffness, under the ramp-step and sinusoidal load force, and the characteristics of load with varied damping were researched. The research results indicate that the method designed herein may well simulate the variations of load stiffnesses, the variations of load dampings and even the coinstantaneous variations of load stiffness and load damping characteristics.
quadruped robot; hydraulic drive unit(HDU); variable load stiffness and load damping; load characteristics simulation
2015-11-20
国家自然科学基金资助项目(51605417);流体动力与机电系统国家重点实验室开放基金课题资助项目(GZKF-201502);燕山大学博士基金资助项目(B930)
TH137
10.3969/j.issn.1004-132X.2016.18.008
俞滨,男,1985年生。燕山大学机械工程学院博士、讲师。主要研究方向为电液伺服控制系统。巴凯先,男,1989年生。燕山大学机械工程学院博士研究生。王佩,女,1991年生。燕山大学机械工程学院硕士研究生。吴柳杰,男,1987年生。燕山大学机械工程学院硕士研究生。孔祥东(通信作者),男,1959年生。燕山大学机械工程学院教授、博士研究生导师。
