智能三坐标视觉测量在线标定
2016-10-12勾治践贾兆海
勾治践, 贾兆海
(长春工业大学 机电工程学院, 吉林 长春 130012)
智能三坐标视觉测量在线标定
勾治践,贾兆海
(长春工业大学 机电工程学院, 吉林 长春130012)
利用三坐标测量机能够精准平移的优势,采取单摄像机进行双目视觉测量。实验分析采用张正友标定法,在MATLAB实验环境下对内外参数进行计算和标定,给出实验结果并分析实验误差来源。
单目视觉; 在线标定; 三坐标测量
0 引 言
三坐标测量机应用广泛,是产品数字化以及智能化的象征。传统的三坐标测量机存在一些弊端,接触式测量机效率低,在测量时需要获取大量的云数据,这样就浪费了时间,非接触式测量机精度低,传统的光电式测量机虽然缩短了测量时间,但是降低了精度,为解决以上问题,基于机器视觉下的三坐标测量已经是当今热点话题,利用单摄像机对零件相关信息进行测量,得到物体三维信息来判断物体空间位置信息取得一定的成果,而摄像机内部和外部参数影响了识别精度,故此摄像机参数标定是视觉测量的关键步骤。
目前,国内方面也已经取得显著的成绩,采用机器视觉技术应用到三坐标的测量当中,使三坐标测量更加自动化、智能化。因此,基于机器视觉的智能三坐标测量有着很好的发展前景和空间。利用摄像机定位原理对被测物体进行识别定位,将视觉系统的图像信息引入三坐标测量系统中,充分利用了三坐标的高精度性和机器视觉的柔性,降低成本,节省时间,缩短了产品周期。
1 智能三坐标视觉测量在线标定原理
由于三坐标测量机可以沿着坐标轴精确移动,我们把摄像机安装在三坐标测量机的z轴上,摄像机可以随着三坐标精确平移,在两个位置获取同一物体两幅图像,于双目视觉测量相似,进行视觉测量[1]研究,如图1所示。
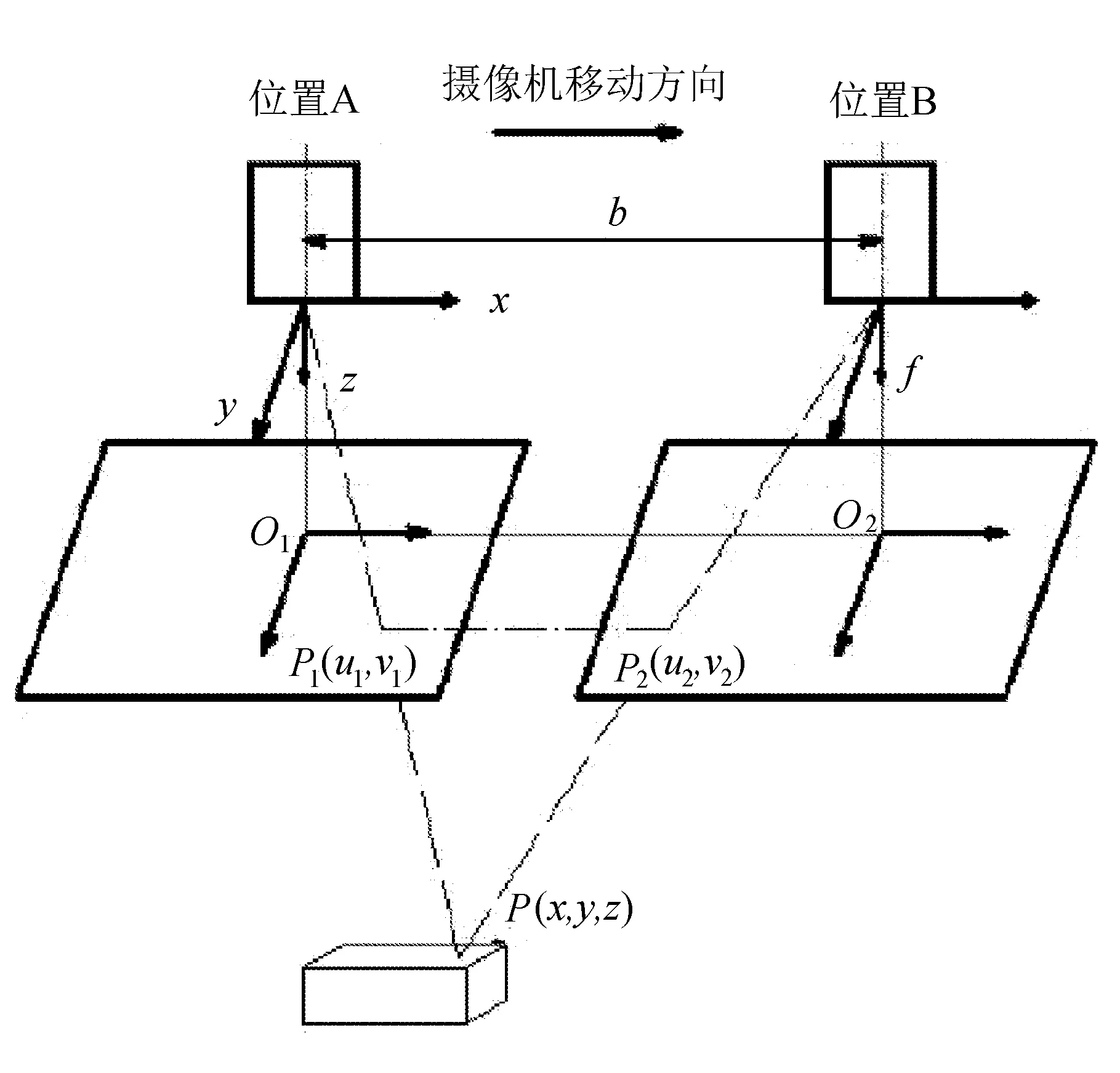
图1 单摄像机双目视觉测量系统图
1.1传统平行双目视觉立体测量系统原理
平行双目视觉立体测量下两摄像机的光轴是互相平行的,空间点P在各图像坐标系中存在如下关系[2]:
所以,左摄像机图像对应右图像上的点的三维坐标都能通过上式求得。
1.2单摄像机双目立体视觉系统标定原理
由于视觉测量系统在线标定的数学模型是表示世界坐标系owxwywzw到图像像素坐标系uv的坐标转换的非线性方程组,于是在建模之前就必须构建一个合理的坐标系[3],如图2所示。
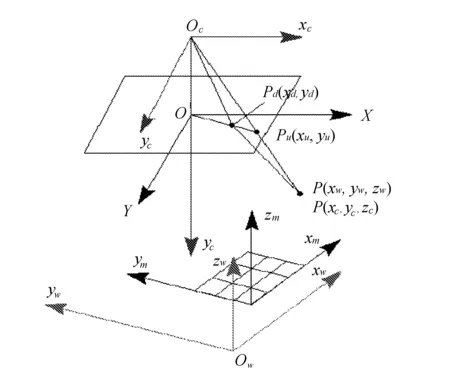
图2 坐标关系示意图
世界坐标系与模板坐标系有着平移关系,其坐标转换关系为[4-5]:
式中:x0,yo,zo——定值,3个坐标轴方向的平移值。
模板坐标系与摄像机坐标系有着平移和旋转关系为:
式中:R——旋转变换,是3×3的正交矩阵;
t——三维平移向量。
通过像素坐标系可以得到像素坐标值,但是像素坐标系(o,u,v)仅仅表示位于图像中的行、列数,不包含像素的空间位置信息。而用图像坐标系(o1,x,y)(或者说测头坐标系)来表示图像的实际物理位置,像素坐标系(u,v)与图像坐标系(x,y)存在以下关系:
式中:dx,dy——x轴、y轴的物理尺寸;
θ——u轴与v轴的互不垂直程度。
摄像机坐标系用来描述摄像成像过程,是以摄像机透镜中心点为坐标原点构建的坐标系,投影模型可以表示为:
式中:f——摄像机的焦距;
zc——摄像机到物体的距离;
(x,y)——特征点的图像坐标。
2 张正友标定法的在线标定实验
将三维空间的物体到平面投影看作是成像模型,建立的成像模型如图3所示。
图3 系统组成示意图
依据此模型进行标定方法的实验,该实验通过三坐标的精确移动来控制摄像机的位置,然后拍摄两幅不同的被测物的图像,由于本实验采用三坐标的平移拍摄图形,所以两个摄像机坐标系之间有着依存关系,不需要计算两者之间的矩阵转换,减轻了计算量,也减小了误差。依靠MATLAB软件进行摄像机内外参数的标定计算,为达到标定目的进行如下实验。
2.1摄像机内部参数的标定
根据摄像机的成像模型分析,摄像机的内参数包括:f,dx,dy,u0,v0。首先制作一张8×8的棋盘格格式黑白标定模板,然后附着在固定的平面上。在三坐标测量机上安装固定摄像机,并配备计算机、图像卡和标定软件,将摄像机对该模板进行拍摄,如图4所示。
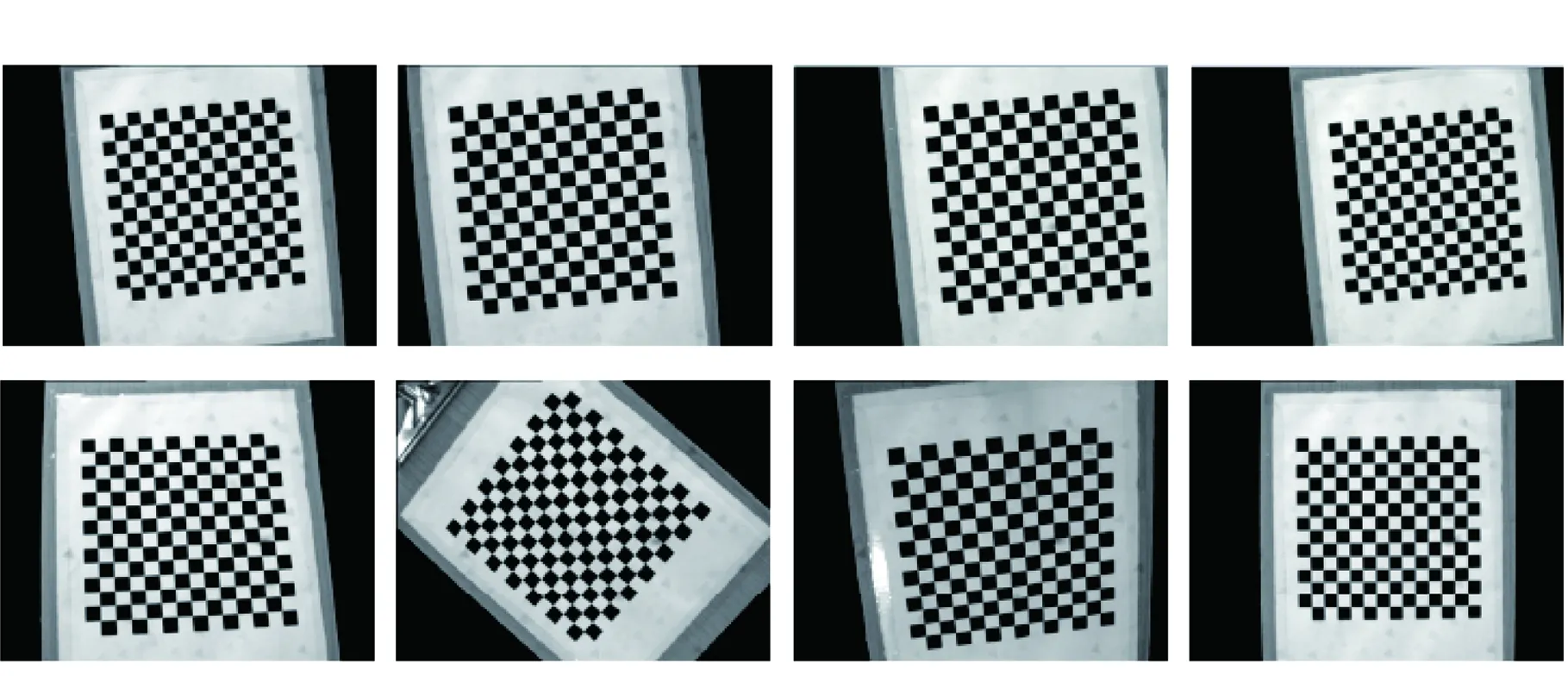
图4 摄像机模板参数的标定图像
利用MATLAB图像处理软件对次模板进行特征点(角点)的提取,确定这些特征点的坐标值。并且标定棋盘格的角点,提取角点,此外还要对平面模板的4格顶点坐标信息进行设定,确定后,MATLAB软件就可以自动生成模板区域内的所有点的坐标信息。于是得到了摄像机的内参数,完成了内参的标定。A称为摄像机内部参数矩阵,定义
式中:(u0,v0)——主点坐标;
u0,v0——分别为u轴和v轴的尺度因子;
γ——u轴和v轴的不垂直因子。
2.2摄像机的外部参数标定
由于系统采用的是在三坐标机驱动单摄像机精确移动完成的,所以只需要对摄像机的外部参数标定一次就行,摄像机移动前后,产生的直线距离为B。也就是说计算出移动前后矩阵的旋转关系以及平移关系。
同时,在对外部参数进行标定的过程中,必须要固定棋盘式模板在实验台的位置,不能移动,否则会使实验结果不准确。由这台摄像机在“左、右”方向对零件和模板的拍摄,要求次画面中同时拥有零件图和模板图。如图5所示。
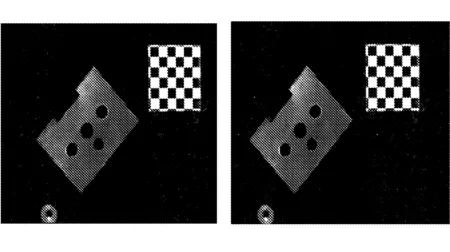
(a) 左图 (b) 右图
2.3数据的处理及参数的优化
应用标定软件对标定数据进行处理,计算出摄像机参数,完成标定。根据以上分析,用最大似然估计对以上参数进行优化[2]。假定坐标点在不同的图像中噪声分布是相同的,那么利用评价函数
进行最小值求解,其中A、Ri、ti就是问题的最优解。
2.4实验结果及误差分析
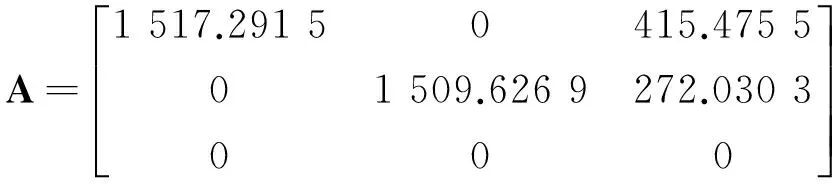
本实验是在Windows7系统下,实验当中用到一台索尼DSC-W150摄像机,摄像机的有效像素为7.2pixiel,利用MATLAB软件标定计算后得到摄像机的内参矩阵为:
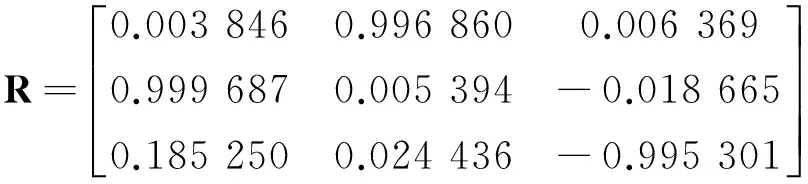
经计算后得到摄像机的外部参数:

另外,实验提取棋盘模板的几组点进行验证。(X、Y、Z)表示实际的坐标值,(x0,y0,z0)表示通过实验给出其对应点的坐标值,进行对比实验,结果见表1。
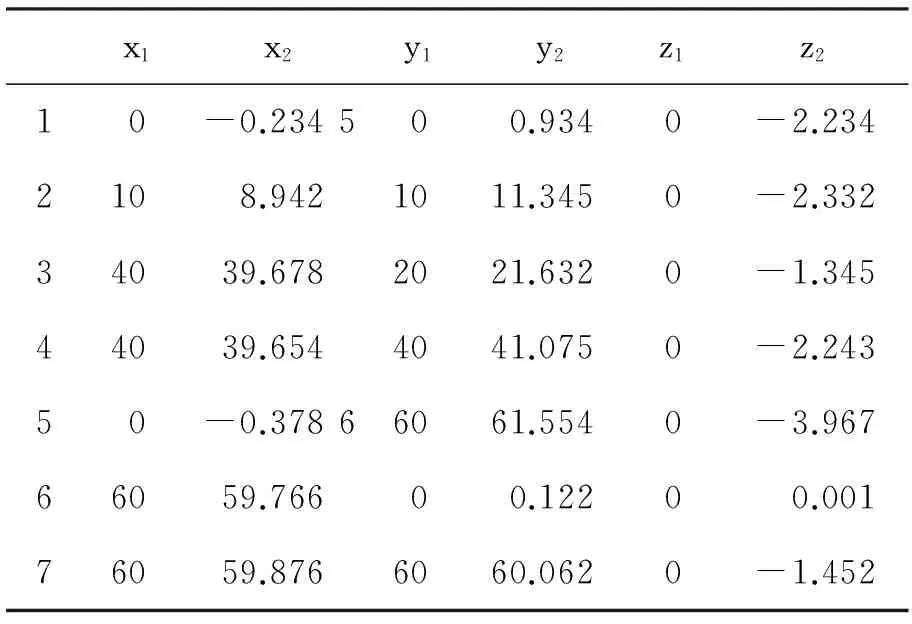
表1 实验数据
从实验结果可以看出:
Δx=-3.782mm
Δy=2.567mm
Δz=-3.967mm
误差产生主要有以下原因:
1)自己制作的棋盘模板粗糙,不够精细。通过数据看出z轴数据不为0,推测原因是在粘连模板时有缝隙,制作工艺有待提高。
2)实验过程中,可能会有其他噪声的干扰、摄像机的倾斜因子、畸变系数等,需要进行去噪实验以及优化实验。
3)实验次数少,所以增加实验的次数,有可能会提高实验数据的准确性。
4)图像有径向畸变和切向畸变等几何变形。
3 结 语
基于张正友标定法[3]利用MATLAB进行标定实验,提出了智能三坐标视觉测量在线标定技术,分析了该项技术的原理,建立数学模型,同时也对标定技术进行了实验,数据显示标定精度与传统的标定技术精度在±4 mm以内,该项技术满足了企业的工程需要,降低了成本,提高了效率。
[1]黄风山,钱惠芬.三坐标测量机驱动摄像机标定技术[J].光学精密工程,2010,18(4):952-957.
[2]刘晓利,田媛,童飞,等.双目立体视觉的光学标定设计[J].光学仪器,2013,35(3):11-15.
[3]王春梅,黄风山.三坐标测量机驱动的单目立体视觉坐标测量方法[J].组合机床与自动化加工技术,2013(12):71-74.
[4]B Triggs, P Mclaucnlan, R Hartley, et al. Bundle adjustment-a modern synthesis[J]. Vision Algorithm Theory and Practice,2000,1883:78-81.
[5]马新辉.智能三坐标测量机的研究[D].天津:天津大学,2002.
Online calibration in intelligent three-dimensional visual measurement
GOU Zhijian,JIA Zhaohai
(School of Mechatronic Engineering, Changchun University of Technology, Changchun 130012, China)
By taking advantage of the accurate translation in three-coordinate measuring machine, a single camera is used for binocular vision measurement. Zhangzhengyou calibration method is applied for experimental analysis, and both inside and outside the calculation of parameters are calculated and calibrated with MATLAB. The experimental results and error source are studied in detail.
monocular vision; online calibration; three-coordinate measurement.
2016-01-22
吉林省科技成果转化重大项目(20115079)
勾治践(1956-),男,汉族,吉林长春人,长春工业大学教授,博士,主要从事机械系统动力学方向研究,E-mail:gouzhijian@ccut.edu.cn.
10.15923/j.cnki.cn22-1382/t.2016.4.15
TP 391
A
1674-1374(2016)04-0392-04
