基于dsPIC30F4011的逆变电源复合控制
2016-10-12郭金库刘克平
郭金库, 赵 彬, 李 岩,刘克平
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
基于dsPIC30F4011的逆变电源复合控制
郭金库,赵彬,李岩,刘克平*
(长春工业大学 电气与电子工程学院, 吉林 长春130012)
将重复控制和双闭环控制相结合应用于单相逆变电源系统,建立了仿真模型,进行仿真实验。应用数字信号控制器dsPIC30F4011实现了该复合控制方法。
逆变电源; 重复控制; 复合控制
0 引 言
逆变电源的控制方法影响其输出电能的品质,其拓扑结构需要结合优良的控制方法才能输出高质量的电能,逆变电源的控制方法是近年来的研究热点之一[1-2]。第三代逆变电源采用实时反馈控制技术,目前,比较常用的实时反馈控制技术主要有双闭环控制、重复控制、滑模变结构控制、模糊控制等[3]。实时反馈控制技术的应用,使逆变电源的性能得到大幅度的提升。随着用户对逆变电源性能要求的提高,单一的控制方法难以同时满足动态、静态两方面的要求,将控制方法结合在一起,优势互补,构成复合控制器是一种趋势所在。文中分析了双闭环控制和重复控制方法的优缺点,提出一种将两种控制方法相结合的复合控制方法,通过Matlab/Simulink软件进行仿真实验,仿真结果表明,与单一的控制方法相比,复合控制方法能够改善逆变电源系统的动静态品质,具有快速的动态响应和较小的稳态误差。
1 重复控制方法及双闭环控制方法
1.1重复控制方法研究
重复信号发生器结构如图1所示。
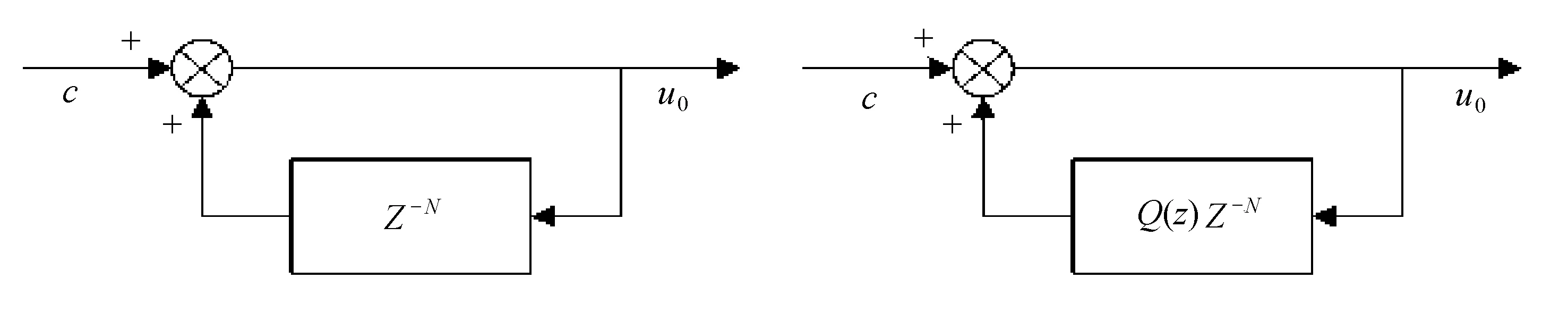
(a) 重复信号发生器 (b) 改进型重复发生器
图1重复信号发生器结构图
图1(a)为重复信号发生器,相当于以给定信号周期为步长的积分环节,可以实现跟踪给定信号,但对系统的鲁棒性极为不利。这种结构带来了单位圆上的开环极点,开环系统处于临界稳定状态。这种情况在实际工程应用中是不允许的,因此需要将这种结构加以改进,改进后重复信号发生器见图1(b),在反馈回路加入辅助补偿器Q(z),加入Q(z)后单位圆上的开环极点发生偏移,有利于系统的稳定。由图1(b)可得:
(1)
(2)
由式(2)可知,k时刻系统的输出等于(k-N)时刻输出的0.98倍与k时刻偏差的和。当输入量减小为输出量的2%时,累加过程相当于不再继续。通过加入辅助补偿器,系统的稳定性能得到了提高,但却牺牲了系统的稳态误差。实际中使用的均是改进型重复信号发生器见图1(b)。在此基础上添加周期延时环节Z-N、补偿器C(z)就构成了一个完整的重复控制器。重复控制器相当于在原有稳定系统的基础上嵌入重复控制器,这种控制结构可称为“嵌入式”结构。嵌入式重复控制系统结构图如图2所示。
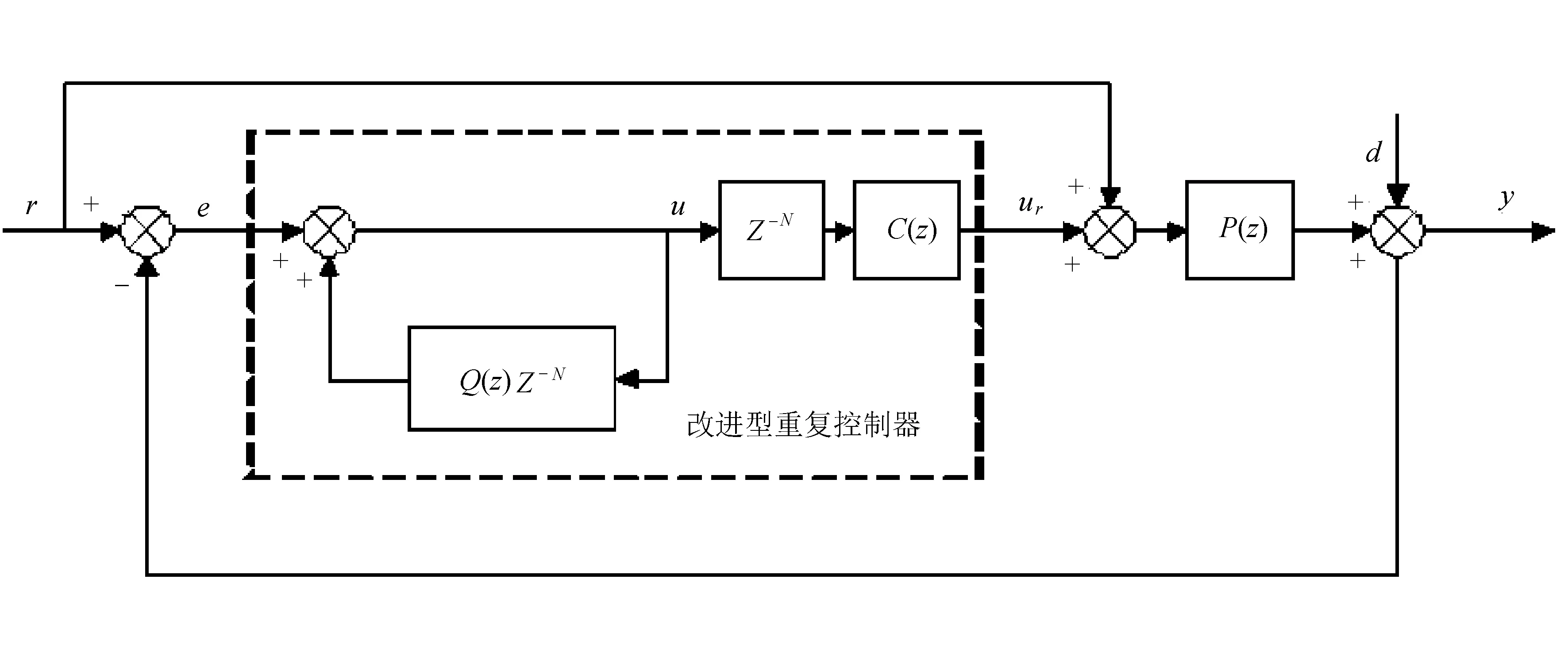
图2嵌入式重复控制系统结构图
图中:r——参考输入;
y——系统输出电压;
d——扰动信号;
P(z)——控制对象;
Z-N——周期延时环节,串联在前向通道,实现控制动作延迟,实现本周期的检测信号直至下一个周期影响控制量。
对于重复控制器,当系统存在偏差时,重复控制器产生的相应的控制量至少要延迟一个周期[4],所以采用重复控制方法,系统动态性能较差。
1.2双闭环控制方法研究
双闭环反馈分为电感电流双闭环反馈和电容电流双闭环反馈[5],电感电流双闭环反馈中电流反馈量为流经电感的电流,电容电流反馈中电流的反馈量则为滤波电容电流,双闭环反馈的结构图如图3所示。
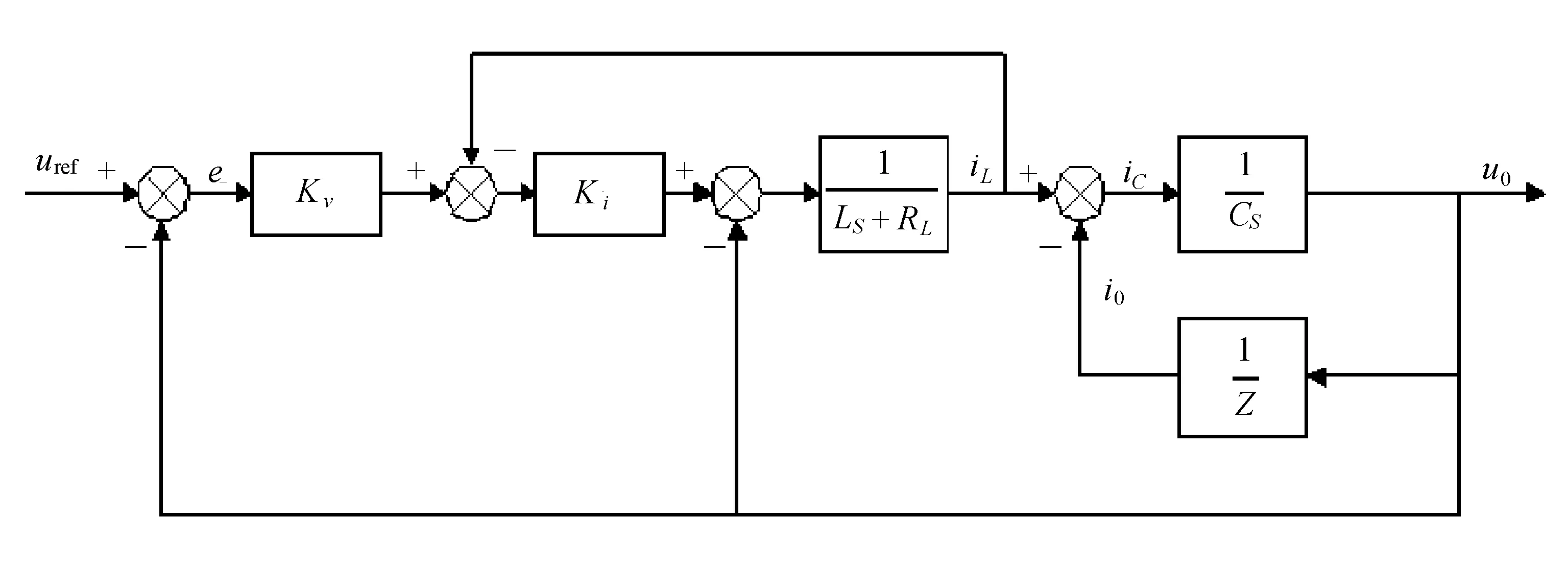
(a) 电感电流双闭环反馈
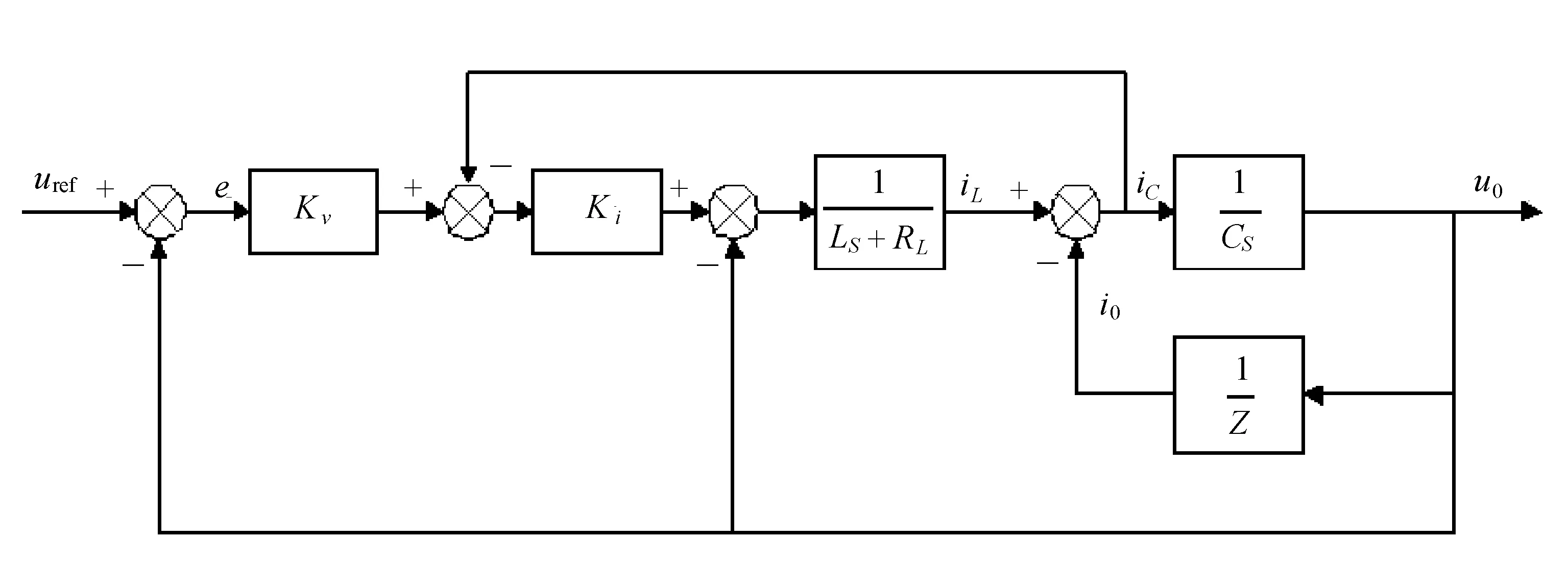
(b) 电容电流双闭环反馈
图中:uref——参考输入;
Kv——电压调节增益;
Ki——电流调节增益;
Z——负载。
由图3可以看出,参考输入电压与反馈电压信号做差得到偏差信号,经过电压调节器作用,作为电流环的输入,同反馈的电流信号作比较后,经过电流环调节器的作用输出相应的控制量。双闭环反馈控制采用电压作为外环反馈,电流为内环反馈,具有快速的动态响应,但稳态精度不高[6]。
2 复合控制方法研究及参数选择
通过对重复控制方法和双闭环控制方法的研究可知,二者各有优势,同时又各有不足之处,考虑到动、静态性能对系统的重要性,文中将重复控制器与双闭环控制器相结合构成复合控制器。采用复合控制,当存在偏差时,可以通过重复控制器逐周期的消除偏差,从而较好地跟踪给定信号,同时通过双闭环控制器加快系统的动态响应速度。重复控制提高系统的稳态性能,双闭环控制改善系统的动态性能,二者发挥各自优势,有效提高系统的动、静态性能。
复合控制系统框图如图4所示。
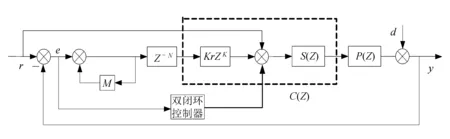
图4复合控制系统框图
图中:r——参考输入;
M——重复控制器的内模,M=Q(Z)Z-N+L,Q(Z)通常选取为略小于1的正常数,以实现系统的稳定。
用Kr来调整校正信号的幅值,超前环节Zk用来补偿滤波器S(Z)和控制对象P(Z)的总相位滞后,N为一个基波周期的采样次数,L=PdN/360,Q(Z)的相位滞后为Pd,文中取Q(Z)=0.95。补偿器C(Z)影响重复控制器控制效果,其作用是对P(Z)进行相位和幅值补偿。C(Z)=KrZkS(Z),重复控制器增益Kr用来调整相应控制量的幅值。超前环节Zk用来补偿系统的相位滞后θ,k=θN/360。滤波器S(Z)抵消谐振峰值,提高系统的稳定性。零相移滤波器可以对固定频率有很强的衰减[7],文中将二阶滤波器和零相移滤波器相结合作为S(Z)。实验中对双闭环控制器中的参数进行调整,使控制效果最优。
3 控制系统仿真
系统闭环仿真模型如图5所示。

图5系统闭环仿真模型
逆变桥的输出首先经过升压变压器、经LC滤波器滤波后输出。检测到的电压值与给定参考进行比较,产生偏差,经过复合控制器输出相应的控制量,调整由数字信号控制器dsPIC30F4011产生的PWM波形占空比,进而控制逆变桥中MOS管的导通和关断时间,使输出电压波形较好的跟踪给定参考。文中双闭环控制中,内环、外环只采用了比例调节器,因为加入积分调节器会使输出信号产生相位滞后,增加系统控制难度,加入微分环节会使系统的干扰信号增大,影响控制效果[8]。
系统复合控制器框图如图6所示。
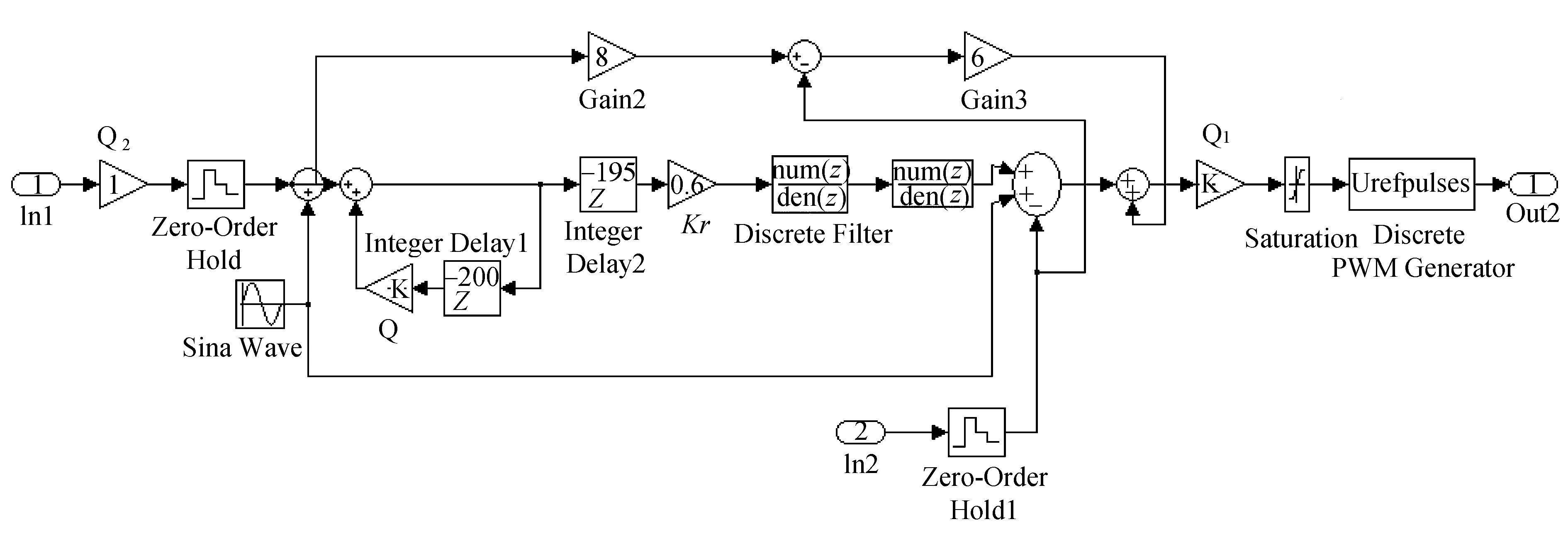
图6复合控制器框图
系统检测到的电压值与给定参考电压进行比较,产生偏差信号,经过复合控制器产生相应的控制信号,有效地抑制偏差,进而实现跟踪给定参考。检测到的电流值与电压环的输出值比较,增强系统的抗干扰能力及负载突变时的调节能力。当存在偏差时,通过双闭环控制器使系统具有快速的动态响应,通过重复控制器逐周期的消除偏差,较好地跟踪给定信号,系统采用复合控制方法时有更好的动静态性能。
4 仿真实验研究
仿真参数如下:直流母线电压为24V;额定输出电压为交流220V;额定输出电压频率为50Hz;滤波电感、电容分别为L=1mH,C=40μF,滤波电感等效串联电阻为0.1Ω,滤波电容等效串联电阻为0.01Ω;仿真时间0.1s。系统仿真波形如图7所示。
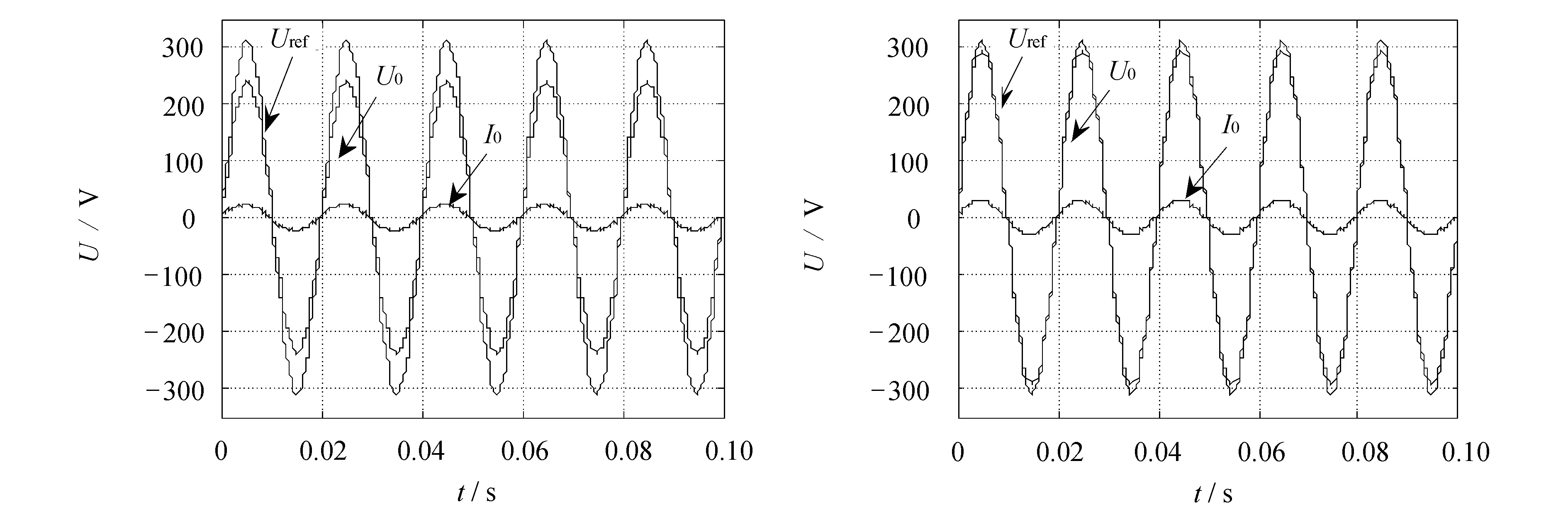
(a) 双闭环控制仿真波形(kv=2,ki=2) (b) 双闭环控制仿真波形(kv=6,ki=4)
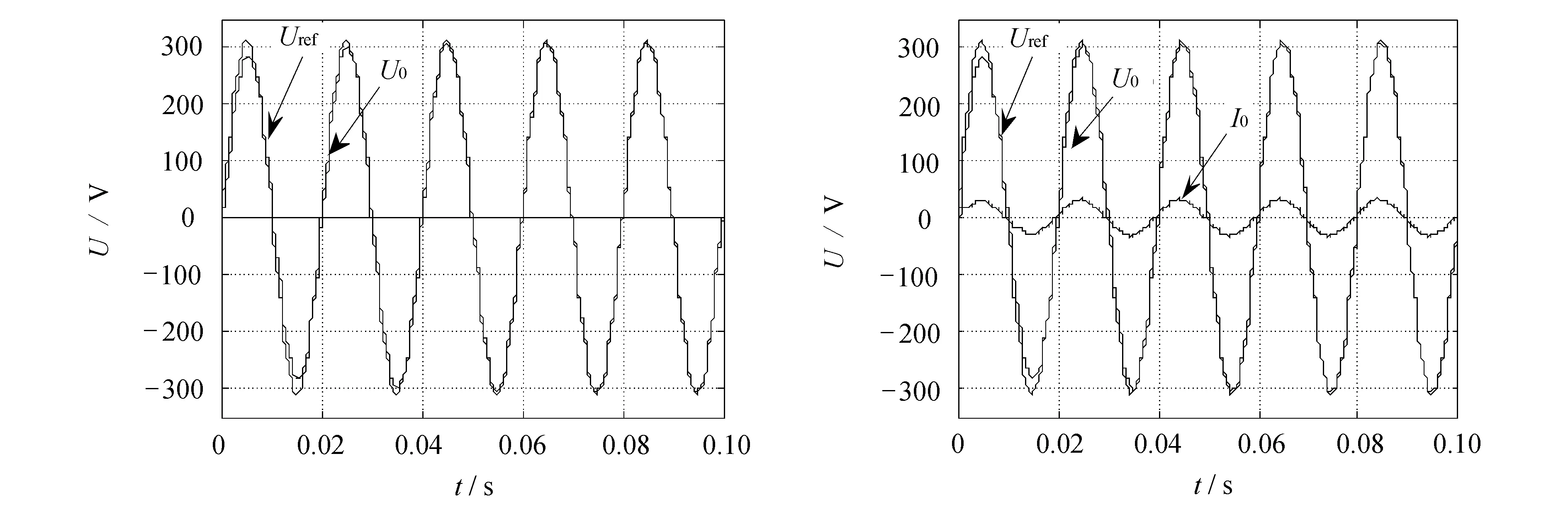
(c) 重复控制空载仿真波形 (d) 重复控制带载仿真波形
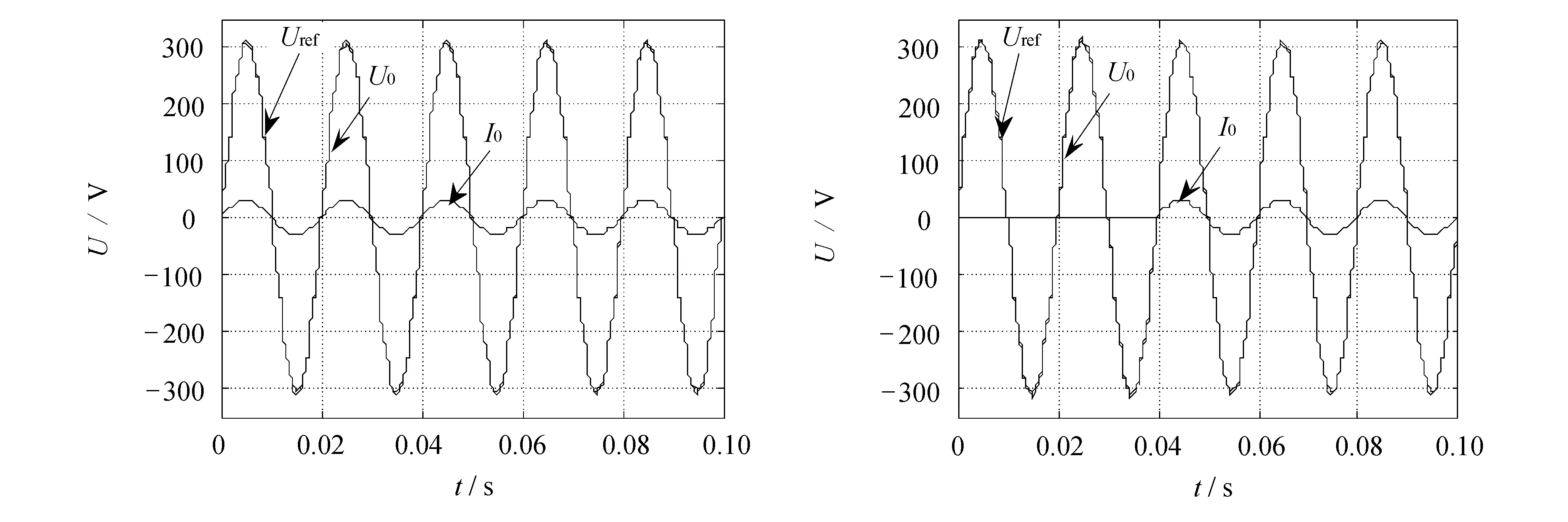
(e) 复合控制带载仿真波形 (f) 复合控制突加负载仿真波形
图中:U0——输出电压;
Uref——参考电压;
I0——输出电流。
系统采用双闭环控制方法时,从图7(a)中可以看出,当kv=2,ki=2时,系统稳态误差较大。进一步对参数进行调整,取得最优参数kv=6,ki=4,仿真波形见图7(b),与图7(a)相比较,虽然系统稳态误差明显减小,但稳态效果仍不理想。如继续增大kv或者ki,系统将会振荡。
系统采用重复控制方法时,输出波形见图7(c)、(d)。从图中可以看出,在重复控制器的作用下,从第一个周期开始,逐周期的减小偏差,系统的动态响应较慢,稳态误差较小。
系统采用复合控制方法时,输出波形见图7(e)、(f)。当存在偏差时,可以通过复合控制器逐周期地消除偏差,动态响应迅速,能够较好地跟踪给定信号。系统采用复合控制方法有更好的动静态效果。
5 实验研究
采用单相全桥逆变电路的结构设计了逆变电源系统。其中包括功率开关管、起到保护功率开关作用的二极管、起到续流作用的二极管以及功率开关管的输入电阻等外围配置元件,其主体电路图如图8所示。
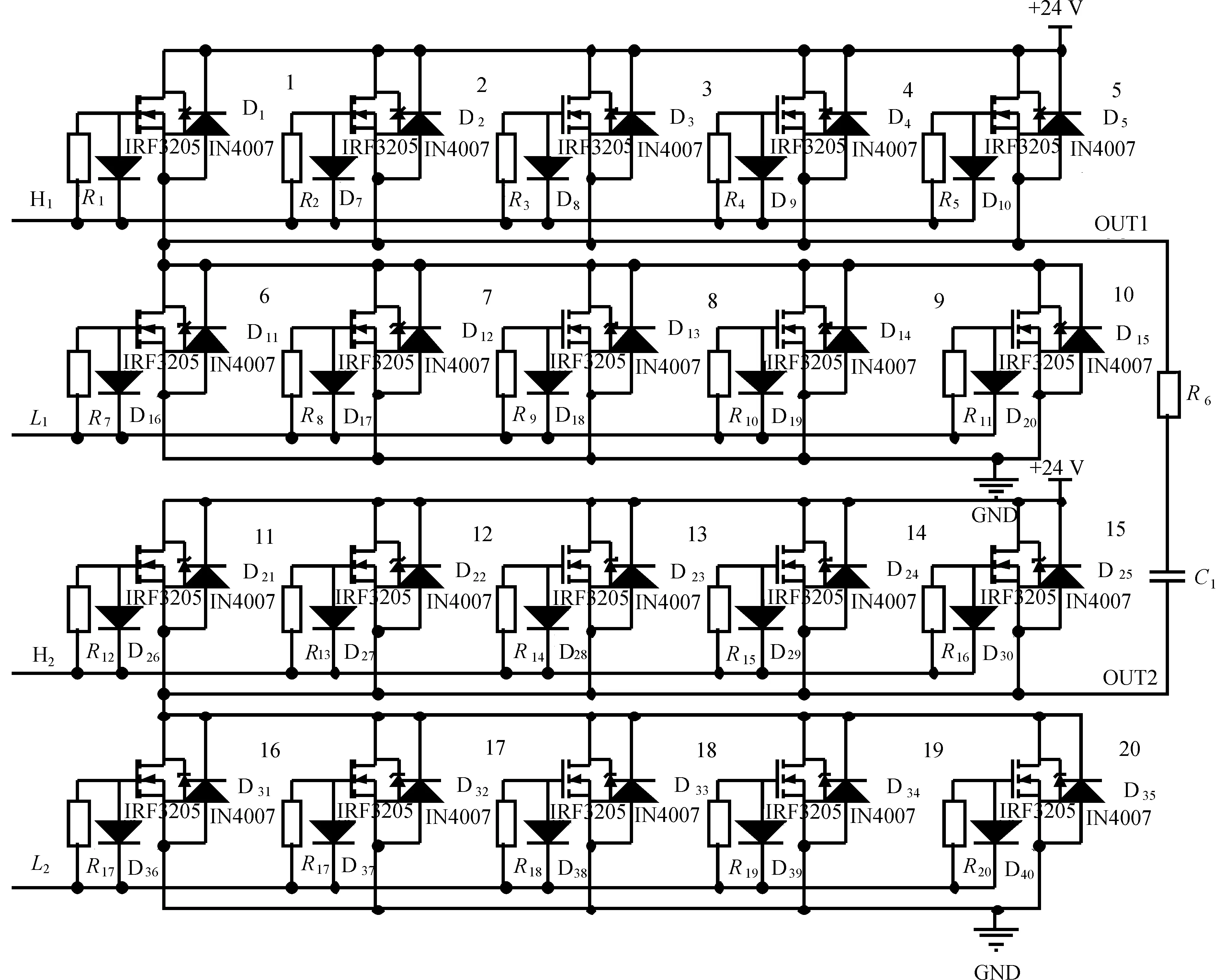
图8逆变器主电路
图8为文中设计的逆变电源系统主电路,直流母线电压为24V,图中H1、L1、H2、L2分别代表第一片及第二片驱动芯片IR2110的高端输出及低端输出。核心控制器dsPIC30F4011检测输出电压值,并根据复合控制方法产生相应的控制量,进而由PWM模块产生相应脉宽的PWM信号,经过驱动芯片控制两组桥臂交替导通及每组桥臂中MOS管的导通和关断的时间,使输出为稳定的电压波形。功率开关管选择为MOS管IRF3205,其能够承受电压最大为55V,允许通过的最大电流为110A,每一组桥臂均由10个MOS管组成,5个并联在一起作为一个整体,起到分流作用。与IRF3205反并联的二极管选择为IN4007,其反向耐压值可达700V,满足文中要求。与栅极输入电阻相连的二极管选择为IN4007,主要起到续流的作用,确保MOS管有效的关断,避免直通现象发生。在理论分析和仿真分析基础上,以数字信号控制器dsPIC30F4011作为核心,实现复合控制方法,应用于单项全桥逆变电源系统,系统输出电压波形如图9和图10所示。
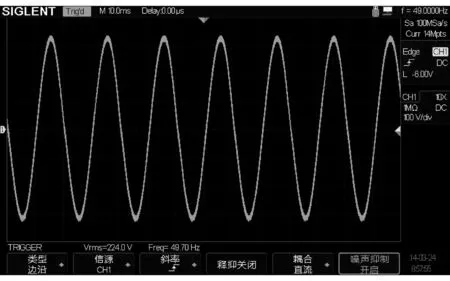
图9空载时系统输出
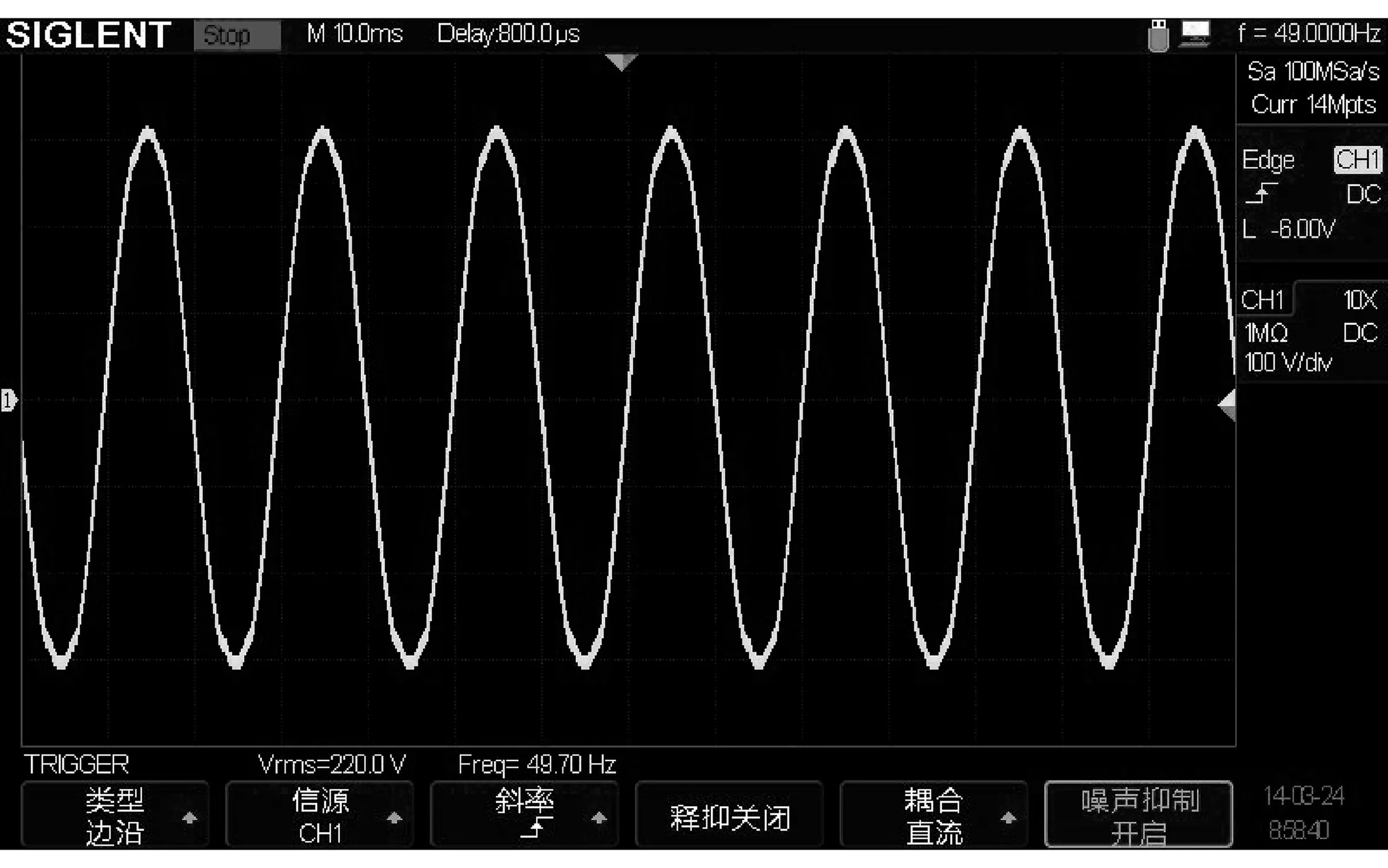
图10 带载时系统输出
图9和图10分别为滤波后的空载输出电压波形和滤波后的带阻性负载电压波形。从图中可以看出,在空载和带载的情况下,输出电压波形较好,输出电压无明显变化,系统负载调整率比较好,有良好的动、静态性能。
6 结 语
重点研究逆变电源的复合控制方案,分析了重复控制方法和双闭环控制方法的优缺点,将二者相结合,取长补短,优势互补,构成复合控制方法。在仿真实验的基础上,通过数字信号控制器dsPIC30F4011将复合控制方法应用于逆变电源系统。实验结果表明,复合控制方法结合了双闭环控制方法和重复控制方法的优点,有效地改善了逆变电源系统的动静态性能,动态响应速度快,稳态精度高。复合控制方法是一种优良的控制方法,具有广泛的应用前景。
[1]李勇,王国富,高东东.新型单相逆变电源及其控制算法的研究[J].电力电子技术,2013,47(10):90-92.
[2]杨照辉,陈红娟.基于SPWM模块化逆变电源的研究及设计[J].电源技术,2014,38(7):1349-1351.
[3]沈兰兰,李海标,秦泽熙.基于SPWM的逆变技术研究[J].电子技术应用,2014,40(8):58-61.
[4]侯磊.以新型单片机为核心的正弦逆变电源设计[D].呼和浩特:内蒙古大学,2013.
[5]TsaiMiching,YaoWusung.Designofaplug-intyperepetitivecontrollerforperiodicinputs[J].IEEETransonControlSystemsTechnology,2002,10(4):547-555.
[6]邹丽爽.逆变器数控算法的研究与实现[D].哈尔滨:哈尔滨理工大学,2009.
[7]梁美丽.基于SPWM技术的独立逆变电源技术设计[J].电子制作,2013(20):14-15.
[8]杨冬冬.基于DSP的逆变电源数字控制技术研究[D].南京:南京航空航天大学,2009.
Base on dsPIC30F4011 compound control of an inverter power
GUOJinku,ZHAOBin,LIYan,LIUKeping*
(School of Electrical & Electronic Engineering, Changchun University of Technology, Changchun 130012, China)
Repetitivecontrolanddoubleloopcontrolarecombinedtogetherapplyinginasingle-phaseinverterpowersystem.ThesimulationmodelisbuiltthedigitalsignalcontrollerdsPIC30F4011isusedtofulfillthecompoundcontrol.
inverter;repetitivecontrol;compoundcontrol.
2015-04-16
吉林省科技发展计划项目资助(20140204026GX)
郭金库 (1990-),男,汉族,吉林德惠人,长春工业大学硕士研究生,主要从事智能控制方向研究,E-mail:1057191467@qq.com. *通讯作者:刘克平(1971-),男,汉族,吉林汪清人,长春工业大学教授,博士,主要从事复杂系统建模、优化与控制方向研究,E-mail:liukeping@ccut.edu.cn.
10.15923/j.cnki.cn22-1382/t.2016.4.12
TM773
A
1674-1374(2016)04-0372-07
