考虑模型参数不确定性的航天器姿态机动控制
2016-10-11李隆侯建文史小平
李隆,侯建文,史小平
(1.哈尔滨理工大学 电气与电子工程学院,黑龙江 哈尔滨 150080; 2.上海航天技术研究院,上海 201109;3.哈尔滨工业大学 航天学院,黑龙江 哈尔滨 150080)
考虑模型参数不确定性的航天器姿态机动控制
李隆1,侯建文2,史小平3
(1.哈尔滨理工大学 电气与电子工程学院,黑龙江 哈尔滨 150080; 2.上海航天技术研究院,上海 201109;3.哈尔滨工业大学 航天学院,黑龙江 哈尔滨 150080)
针对具有参数不确定航天器大角度姿态机动的非线性控制问题,提出一种分散保性能控制律。研究刚性航天器大角度机动中航天器姿态控制问题时,忽略挠性模态对其的影响。在对具有参数不确定航天器进行建模的前提下,对模型的性质进行了描述。利用反馈线性化方法将航天器姿态动力学模型变换成三个部分进行分散控制器的综合,设计保性能控制律对航天器模型中参数不确定性进行抑制。由于引入保性能控制律,在补偿参数不确定性的同时还能够满足系统性能指标的要求。仿真实验结果表明,所设计的控制律能保证航天器在不确定性的影响下,精确完成大角度姿态机动,验证了方法的有效性。
航天器;姿态机动;保性能;反馈线性化;不确定性
0 引 言
航天器在进行对地观测、空间通信和导航等科学任务时,姿态要快速并以很高的控制精度对参考姿态进行跟踪。近些年来众多学者研究了复杂的控制方法[1-11],其中不乏适用于航天器控制的方法。文献[4]针对卫星姿态跟踪问题,设计了非线性最优反馈控制律。特别地,随着一些新型空间项目的出现,航天工程中需求的牵引对航天器的姿态控制精度提出了更高的要求。文献[5] 为适应飞行器大角度姿态机动的要求,采用修正的Rodrigues参数描述卫星的姿态运动,并将飞行器姿态运动学和动力学方程转化为线性参数可变系统,提出一种系统矩阵与Lyapunov矩阵分离的混合H2/H性能准则。航天器的大角度姿态控制是典型的非线性控制问题,传统的线性控制方法不能很好的解决这类问题。同时,航天器在工作过程中所遇到的参数不确定性也会对姿态控制的精度产生影响。近年来,许多学者使用先进的非线性控制算法对这类问题进行了研究,文献[6]针对不确定性航天器姿态控制问题,通过设计一种全状态反馈自适应控制律,保证航天器的姿态精确的跟踪期望轨迹;文献[7]中,作者使用Backstepping方法设计了航天器的姿态机动控制器;文献[8] 设计出基于降维观测器的非线性镇定控制器, 并采用SOS结合S-procedure理论, 给出挠性卫星非线性姿态系统的局部可镇定条件。文献[9] 提出了一种基于平方和优化的空间飞行器大角度姿态机动状态反馈最优保性能控制方法。文献[10]通过一种基于特殊Lyapunov函数的Backstepping方法设计了刚体卫星的姿态机动控制器,并对执行器饱等性能问题进行了研究;文献[11]利用动态逆方法解决了理想航天器模型的大角度姿态控制问题,但研究并不完善,未考虑不确定参数的影响。
针对前述研究的不足,本文给出了带有参数不确定性的航天器大角度姿态非线性控制的解决方案并满足性能指标的要求。首先分析了航天器模型的特点并进行了变换;然后,利用反馈线性化方法将航天器标称模型进行了补偿;接下来,考虑了航天器中存在的参数不确定性,利用保性能方法设计了一种分散姿态控制律,并用线性矩阵不等式方法给出了求解方法,严格的稳定性证明也在文中给出;最后,通过给出多组数值仿真结果并对结果进行比较和分析,仿真结果验证了提出方法的有效性。
1 航天器姿态动力学模型的建立及其性质描述
考虑以欧拉角描述的航天器动力学和运动学模型,其主要由式(1)和式(2)两部分组成,主要考虑的是大角度机动的刚性航天器模型,忽略挠性模态的影响,具体如下:

(1)
通过牛顿力学可得到航天器的动力学模型,参见文献[12]。具体如下:

(2)
其中:J是航天器的转动惯量矩阵;Tu是控制力矩矢量;Hs=Jω+hw。
根据MIT的Slotine教授等在文献[13]给出的航天器模型变换方法,可将式(1)和式(2)变换成如下的形式:

(3)
其中:M(γ)=Z-TJZ-1;

Tu=ZTF;

控制器的设计可利用模型的性质得到,为了后续的设计,首先给出式(3)描述的航天器模型的一些有用的性质,即
性质1模型(3)的质量矩阵M(γ)是正定且有界的;
性质2参数矩阵Z-TS(Hs)Z-1具有斜对称性质;
性质4式(3)描述的航天器模型是满足状态空间精确线性化的条件。
考虑到航天器在轨飞行的时候,许多结构参数会发生缓慢的变化,其模型不可能精确的获得,在控制器设计时,考虑了诸如转动惯量、不确定等因素后,模型(3)中的参数可重写成如下的形式:
(4)
将参数(4)带入到航天器的系统模型(3),整理后可得

(5)
控制目标是设计合适的控制器,保证航天器的姿态能够跟踪姿态指令的变化,指令姿态描述为

(6)
综上,控制问题可描述如下:
问题考虑航天器的姿态模型(1)~(3)和模型性质1~4,设计控制力矩Tu,保证航天器存在不确定(4)的情况下,航天器姿态γ的变化能够精确跟踪期望姿态γd。
2 分散保性能航天器姿态控制器设计
考虑带不确定性的航天器模型(5),首先采用反馈线性化方法设计标称模型的控制,其具体形式如下:

(7)


(8)
其中控制量υ0是整个控制器中的保性能鲁棒控制部分。
将控制律式(7)和式(8)带入到航天器的模型(5)中,得

(9)

(10)


(11)
由于在反馈线性化的作用下,航天器的三个回路可看作是独立的,因此控制器可进行分散设计,考虑每个回路的分散保性能鲁棒的形式

(12)
由式(10)和式(12)可知每一个回路的状态空间模型为

(13)
对于式(13)描述的航天器模型可以写成如下的带有不确定项的非线性系统的形式[14-15],

(14)
其中Δf(x,t)是系统的非线性的不确定项,根据前述的模型描述可知此不确定项是系统的姿态角位置,姿态角速度和加速度的函数;在实际航天运行中,当这些状态为零时此不确定项也应不存在,故不确定项Δf(x,t)满足如下的条件:
Δf(0,t)=0
(15)
并且满足Lipschitz条件(实际工程应用中,航天器模型不会存在奇异的非连续状态)

(16)
其中:ε是正的常数;ΔF是满足维数条件的常矩阵。
由条件式(15)和(16)可以得到如下的公式:
‖Δf(x,t)‖≤ε‖ΔF(x)‖。
(17)
为了给出控制器的设计方法,首先给出作为设计基础的二次稳定的定义,即
从信息经济发展层次相关性矩阵中相关系数的变化可以清楚的看到,下层信息经济的发展对上层信息经济发展的正向推动效应随着层级的升高而叠加递增,但是这种递增效应无法传递到最上层,即福利层。因此,尽管福利层信息经济的发展水平仍然需要依靠下层的支撑,福利层信息经济有其独特的特征。
xT(ATP+PA)x+2Δf(x,t)Px≤δ‖x‖2
(18)
的正定矩阵P和常数δ,则称该系统是二次稳定的。

ATP+PA+ε2PFFTP+I<0。
(19)
保性能控制是设计控制器保证系统的鲁棒稳定性,同时使系统的性能指标的值保持在确定的上界内,控制系统设计中常采用如下的二次型指标

(20)
其中,Q>0,R>0是对称正定阵。
定义2针对不确定系统(14)和性能指标(20),若有一状态反馈控制律u=Kx和正常数J*,保证闭环系统满足如下的两个条件:
(1)闭环系统鲁棒稳定;
(2)闭环系统的性能指标(20)的上界是J*,即J≤J*。
则控制u是系统(14)的保性能控制律。
引理2[16]在性能指标(20)下,考虑不确定系统(14),若存在对称正定矩阵P和矩阵K,保证对所有的容许不确定性满足
Q+KTRK+P[A+BK]+[A+BK]TP+ε2PFFTP+I<0。
(21)

引理2给出了保性能控制律存在的条件,但如何求解控制律的增益矩阵仍是难题,近年来,线性矩阵不等式(LMI)理论的快速发展给此类问题的求解提供了一个思路,下面将给出引理1基于LMI的等价条件。
定理针对系统(14)中所有容许的不确定性Δf(x,t),不等式(21)成立当且仅当存在对称正定矩阵M,矩阵W和正常数ε保证线性矩阵不等式

(22)
若式(22)存在可行解,则系统(14)的一个保性能控制律可表示为
u=WM-1x
(23)
证明:根据Schur补引理,由(22)可得

(24)
设Y=AM+BW+(AM+BW)T+MQM+WTRW,进行矩阵运算后,由式(24)可得

(25)
再次使用Schur补引理可得
Y+ε2FFT+MM<0。
(26)
记P=M-1,K=WM-1,由不等式(26)可得式(21)成立。
针对不确定系统(14),选取如下Lyapunov函数
V=xTPx。
(27)
对式(27)求导,且根据不等式(21)可得

(28)
(29)
证毕。
由前述的设计步骤可以得到航天器的控制器vri,由于各回路的模型是一样的,因此设计方法也是相同的,不再详述。
3 仿真验证
为了验证设计方法的有效性,本节对所设计的控制器进行仿真实验。航天器的转动惯量为
在仿真实验中,通过航天器滚转、俯仰和偏航三个控制回路在参数不确定条件下进行大角度姿态机动对其进行验证,其中转动惯量的参数不确定性由0.85J*≤J≤1.15J*来限定的。
为考察设计所设计控制器的性能,设计三种航天器姿态大角度机动任务,并对其进行数学仿真,仿真结果如图1~图9所示。
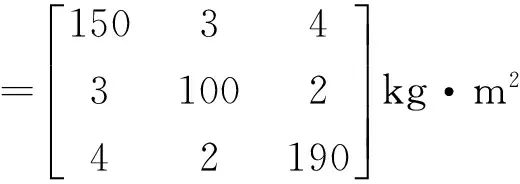
图1~图3是针对具有不确定性的航天器,仅令其滚转轴进行50°的大角度姿态机动,其偏航轴和俯仰轴保持在姿态稳定状态。由仿真结果可看出所设计的控制器,能够保证航天器完成单轴大角度姿态机动任务,并且控制力矩在合理的范围内。
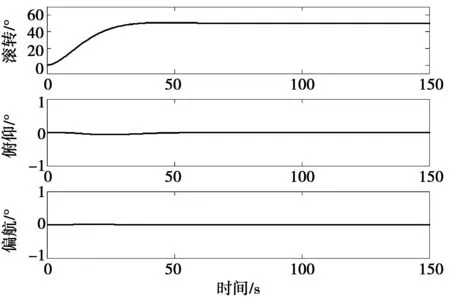
图1 姿态角变化曲线(任务1)Fig.1 Time history of the attitude angle(Mission 1)

图2 姿态角速率变化曲线(任务1)Fig.2 Time history of the angular velocity(Mission 1)
图3 控制力矩变化曲线(任务1)Fig.3 Time history of the control torque(Mission 1)
图4~图6是针对具有参数不确定性的航天器,令其滚转轴、俯仰轴同时机动。机动任务分别是滚转轴机动-60°,俯仰轴机动30°,偏航轴保持在姿态稳定状态。由仿真结果可以看出,针对任意两轴同时大角度机动任务,控制器能够保证航天器完成预定任务,并且保证控制力矩在合理的范围内。

图4 姿态角变化曲线(任务2)Fig.4 Time history of the attitude angular (Mission 2)

图5 姿态角速率变化曲线(任务2)Fig.5 Time history of the angular velocity (Mission 2)

图6 控制力矩变化曲线(任务2)Fig.6 Time history of the control torque (Mission 2)
图7~图9是针对具有参数不确定性的航天器,令其三轴同时进行大角度机动任务,任务分别是滚转轴机动40°,俯仰轴机动-25°,偏航轴机动55°。从仿真结果可以看出,针对航天器三轴同时进行大角度机动任务,控制器能够保证航天器完成预定任务,并且保证控制力矩在合理的范围内。

图7 姿态角变化曲线(任务3)Fig.7 Time history of the angular (Mission 3)
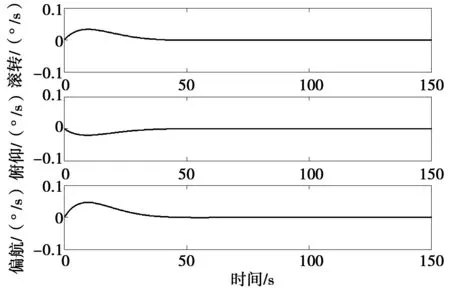
图8 姿态角速率变化曲线(任务3)Fig.8 Time history of the angular velocity (Mission 3)

图9 控制力矩变化曲线(任务3)Fig.9 Time history of the control torque (Mission 3)
分析以上仿真结果可以得到如下结论:
1)在设计控制器的作用下,航天器尽管受到参数不确定性的影响,但仍能很好的完成大角度姿态控制,并且控制力矩也保持在合理的范围之内,姿态角和姿态角速度的曲线变化平稳,姿态误差控制在合理的范围之内。
2)由三类不同任务的仿真可知,控制器不仅能够保证单回路的大角度姿态机动任务的完成,对于两回路和三回路这种非线性控制问题也能进行很好的解决,对转动惯量不确定性也进行了很好的抑制,展现了控制律的适应性和鲁棒性。
4 结 论
针对带有参数不确定性航天器的大角度姿态控制问题,本文首先将航天器模型转换为三个子回路分别进行控制器综合,然后结合反馈线性化和保性能控制方法设计了一种分散非线性姿态控制律并满足性能指标的要求。在进行理论推导的基础上,通过仿真实验对控制律进行了验证。结果表明,在本文控制器的作用下,航天器能够精确的完成三个回路的大角度姿态机动任务,过渡过程平稳,稳态误差小,充分展示了对参数不确定的抑制能力。在本文工作基础上,下一步可以考虑研究对外干扰的抑制的鲁棒保性能控制问题。
[1]武俊峰,贾婧媛.三自由度直升机模型自适应神经模糊控制[J].哈尔滨理工大学学报,2015,20(2):35-40.
WU Junfeng,JIA Jingyuan.Research on adaptive neural fuzzy control of 3-DOF helicopter model[J].Journal of Harbin University of Science and Technology,2015,20(2):35-40.
[2]武俊峰,孙雷.两轮自平衡机器人的控制方法研究[J].哈尔滨理工大学学报,2014,19(6):22-26.
WU Junfeng,SUN Lei.Two-wheeled self-balancing robot control method study[J].Journal of Harbin University of Science and Technology,2014,19(6):22-26.
[3]蔡陈生,杜宁,黎枭.挠性系统控制设计中的不确定性[J].哈尔滨理工大学学报,2014,19(2):41-44.
CAI Chensheng,DU Ning,LI Xiao.Uncertainty in control design for flexible system[J].Journal of Harbin University of Science and Technology,2014,19(2):41-44.
[4]ZHANG Binbin,LIU Kun,XIANG Junhua.A stabilized optimal nonlinear feedback control for satellite attitude tracking[J].Aerospace Science and Technology,27(2013):17-24.
[5]马清亮,郑建飞,蔡宗平,等.空间飞行器大角度姿态机动混合H2/H控制[J].哈尔滨工业大学学报,2012,44(11):105-111.
MA Qingliang,ZHENG Jianfei,CAI Zongping,et al.Mixed H2/Hcontrol of spacecraft large angle attitude maneuvers[J].Journal of Harbin Institute of Technology,2012,44(11):105-111.
[6]B T Costic,D M Dawson,M S de Queiroz,et al.Quaternion-based adaptive attitude tracking controller without velocity measurements[J].Journal of Guidance,Control and Dynamics,2001,24(6):1214-1222.
[7]K.Kim,Y.Kim.Robust backstepping control for slew maneuver using nonlinear tracking function[J].IEEE Transactions on Control Systems Technology,2003,11(6):822-829.
[8]周燕茹,黄文超,曾建平.挠性卫星姿态非线性局部镇定控制[J].控制理论与应用,2014,31(3):279-284.
ZHOU Yanru,HUANG Wenchao,ZENG Jianping.Nonlinear local stabilization control of flexible satellite attitude system[J].Control Theory & Applications,2014,31(3):279-284.
[9]马清亮,杨海燕,岳瑞华,等.空间飞行器大角度姿态机动优化控制[J].空间控制技术与应用,2013,39(3):8-13.
MA Qingliang,YANG Haiyan,YUE Ruihua,et al.Optimization control of spacecraft large angle attitude maneuvers[J].Aerospace Control and Application,2013,39(3):8-13.
[10]I.Ali,G.Radice,J.Kim.Backstepping control design with actuator torque bound for spacecraft attitude maneuver[J].Journal of Guidance,Control and Dynamics,2010,33(1):254-259.
[11]A.H.Bajodah.Inertia-independent generalized dynamic inversion feedback control of spacecraft attitude maneuvers[J].Acta Astronautica,2011,68(11-12):1742-1751.
[12]章仁为,卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,1998:149-155.
[13]J J E Slotine,M D D Benedetto.Hamiltonian adaptive control of spacecraft [J].IEEE Transactions on Automatic Control,1990,35(7):848-852.
[14]沃松林,吴建成.不确定非线性广义系统的鲁棒控制与保性能控制[J].系统工程与电子技术,2007,29(6):955-961.
WO Songlin,WU Jiancheng.Robust control and guaranteed cost control for uncertain nonlinear systems[J].Systems Engineering and Electronics,2007,29(6):955- 961.
[15]王进华,史忠科,曹力,等.一类非线性不确定性系统的H鲁棒控制[J].西北工业大学学报,2001,19(1):56-59.
WANG Jinhua,SHI Zhongke,CAO Li,et al.Hrobust control for a class of uncertain systems[J].Journal of North western Poly-technical Unnversity,2001,19(1):56-59.
[16]俞立.鲁棒控制——线性矩阵不等式处理方法[M].北京:清华大学出版社,2002:122-135.
(编辑:张楠)
Spacecraft attitude maneuver control considering uncertain parameters
LI Long1,Hou Jian-wen2,SHI Xiao-ping3
(1.School of Electrical and Electronic Engineering,Harbin University of Science and Technology,Harbin 150080,China;2.Shanghai Academy of Spaceflight Technology,Shanghai 201109,China;3.School of Astronautics,Harbin Institute of Technology,Harbin 150080,China)
In order to deal with the nonlinear control issue of spacecrafts with uncertain parameters in large angle attitude maneuver,a novel method based on decentralized guaranteed cost control was adopted.As researching object is rigid spacecraft in large angle attitude maneuver,the effects of the flexible modes of the spacecraft was neglected.The spacecraft with uncertain parameter was modeled and the spacecraft attitude dynamic model was transformed into three parts to integrate decentralized controller by using feedback linearization method.Guaranteed cost control method was added to reduce the level of uncertainty and meet the requirement of the performance index.The simulation results show that the designed controller ensures that the spacecraft can complete large angle attitude maneuver accurately even under the effects of uncertainty.Therefore,the proposed controller is proved to be effective.
spacecraft ; attitude maneuver; guaranteed cost control; feedback linearization; uncertain parameters
2014-12-16
中国空间技术研究院(航天五院)CAST基金资助项目
李隆(1977—),男,博士,讲师,研究方向为电机运动控制、智能电气、飞行器智能控制;
侯建文(1960—),男,博士,研究员,研究方向为航天器控制;
李隆
10.15938/j.emc.2016.09.014
TP 13
A
1007-449X(2016)09-0096-07
史小平(1965—),男,博士,教授,研究方向为飞行器智能控制、复杂系统仿真。
