基于无位置传感的开关磁阻电机试验系统研究
2016-10-09陈运亮
陈运亮
(江苏省高淳中等专业学校,南京 214028)
基于无位置传感的开关磁阻电机试验系统研究
陈运亮
(江苏省高淳中等专业学校,南京 214028)
提出一种基于最小二乘支持向量机的开关磁阻电机转子位置估计的新方法,形成一个理想的支持向量机结构来实现电机电流、磁链与转子位置之间的非线性映射,实现开关磁阻电机的转子位置估计。完成以DSP TMS320F28335作为控制核心的开关磁阻电机试验系统硬件设计,给出电流斩波、转子位置估算、相切换程序的流程图和转速估算的算法,并利用Matlab对开关磁阻电机调速系统实现仿真。
无位置传感器开关磁阻电机系统
开关磁阻电机(Switched Reluctance Motor,SRM)具有结构简单、工作可靠、运行效率高、制造成本低、控制灵活、调速性能好,适用于恶劣环境运行等诸多优点。由其构成的开关磁阻电机调速系统(Switched Reluctance Motor Drive,SRD)是一种新型的无极调速系统,兼有交、直流两类调速系统的优点,在较广的转速和功率范围内,控制灵活,易于实现各种转矩-速度特性,能四象限运行,具有较强的再生制动能力等,引起了国内外学者的普遍关注。SRD是一种新型的机电一体化无极调速系统,其技术涉及电机设计、微电子技术、电力电子技术、电机控制等学科。SRD系统在家用电器、通用工业、伺服与调速系统、牵引电机、高转速电机等方面得到了广泛的应用[1-3]。
1 TMS320F28335 DSP芯片
TMS320F28335型数字信号处理器与以往的定点 DSP相比,具有精度高、成本低、功耗小、性能高、外设集成度高、数据以及程序存储量大、A/D转换更精确快速等特点。TMS320F28335具有150MHz的高速处理能力,片内包含一个32位浮点处理单元(FPU),16通道12位AD转换器、2个采样保持器、采样精度为12位、转换时间为80ns、量程为0~3V,高达18路PWM输出,其中6路为150ps分辨率的HRPWM,88个GPIO,8个外部中断,6个捕捉单元(eCAP),2个正交脉冲编码电路(eQEP),6个DMA通道支持ADC、McBSP和EMIF。
基于LS-SVM的开关磁阻电机的无位置传感器试验系统需要实时处理大量的数据和复杂的控制算法,TMS320F28335强大的数字信号处理能力、强大的事件管理能力及良好的编程能力为精准快速地计算转子位置和转速,及时调整控制方式提供了良好的环境。
2 系统硬件设计
无位置传感器开关磁阻电机系统主要由电源、功率变换器、DSP控制器、驱动电路、采样电路、开关磁阻电机本体和显示等组成。其中,采样电路获得相电流、相电压信号,经过信号调理电路送至DSP的AD模块,由TMS320F28335完成磁链计算、转子位置估计、控制方式、换相逻辑信号的产生、转速估算与调节等一系列控制,并与上位机和显示通信来显示电机运行状态。SRD系统软件总体结构如图1所示。

图1 SRD系统软件总体结构
2.1功率变换器设计
功率变换器采用三相不对称半桥结构,不存在桥臂直通现象。相绕组之间完全独立,系统控制灵活、可靠性高。结构如图2所示。

图2 不对称半桥线路拓扑结构
2.2驱动电路设计
功率场效应管MOSFET作为主开关,型号为IRFP450,其漏源电压,连续漏极电流。考虑到主电路为高电压、大电流,而控制单元为低电压、小电流的情况,为了使它们之间隔离,提高系统抗干扰能力,根据功率变换电路结构,选用具有光电隔离的驱动芯片TLP250。该芯片是一种可直接驱动小功率MOSFET的功率型光耦,其最大的驱动能力达1.5A。选用TLP250芯片即实现了功率变换电路与控制电路的可靠隔离,又具备了直接驱动MOSFET的能力,使驱动电路简单。以A相为例,如图3所示。
由DSP给出的驱动信号,经逻辑电路进行逻辑转换来控制TLP250发光二极管阴极(CATHODE)。当CATHODE为低电平时,TLP250输出高电平,功率MOSFET导通;反之,当CATHODE为高电平时,TLP250输出低电平,功率MOSFET关断。
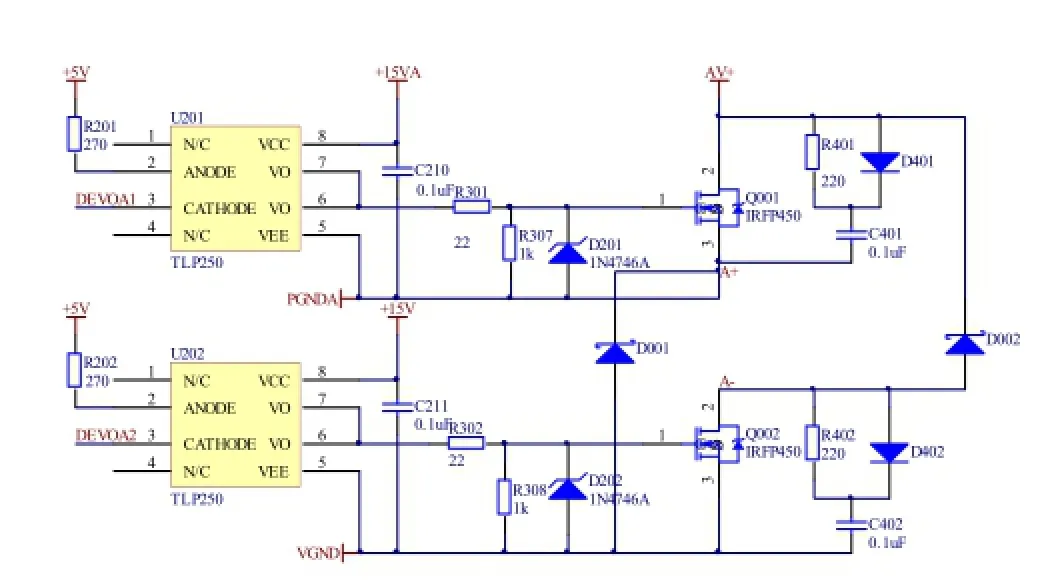
图3 MOSFET驱动电路
2.3主开关管缓冲电路设计
主开关如果突然关断,由于电机绕组呈电感特性,绕组电流不能突变,但却会产生很高的瞬时电压尖峰。如果主开关工作频率较高,该电压尖峰有可能超出主开关最高耐压值的许多倍,这是不允许的。因此,需要在主开关的漏源极之间并联一个缓冲吸收电路。图4显示了主开关关断时有、无缓冲电路时负载曲线的比较。图5则为RCD关断缓冲电路。RS为漏感储能释放电阻,DS为抑制集电极尖峰电压阻尼振荡二极管,CS为开断吸收电容,以减少开关管的关断损耗和保护瞬间尖峰电压击穿开关管。参数计算的依据为:

式中:tf为开关管的关断时间,Iph为相电流,US为电源电压,f为电流斩波频率。
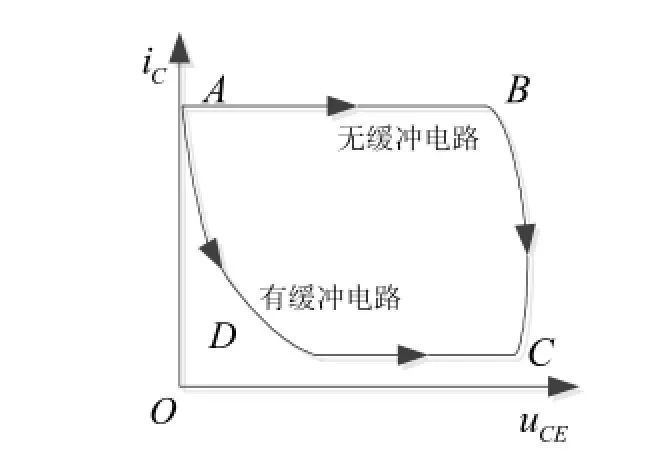
图4 关断时的负载线图

图5 主开关关断保护电路
2.4电流检测设计
霍尔传感器检测电流信号。为了使采样输出的电压与DSP的AD端口电压等级匹配,电路中设置了信号调理电路。为避免在电机运行时出现过电流,使霍尔传感器输出电压过高而损坏DSP接口,在信号调理输出端需增加稳压管1N4728A。
2.5保护电路设计
本系统主要考虑过电流保护。电流保护限的参考值根据绕组允许最大电流值和功率主开关承受最大电流值确定。采用不带自恢复的封锁性保护电路,如图6所示。图中比较器是带正反馈的滞环比较器,目的是避免输入信号在比较限上下时出现抖动而导致误触发。
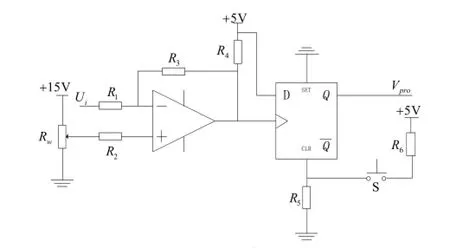
图6 保护电路
3 系统软件设计
SRM低速运行采用CCC控制,高速运行时采用APC控制。图7所示SRD系统控制软件由主程序、初始化程序和中断服务子程序构成。
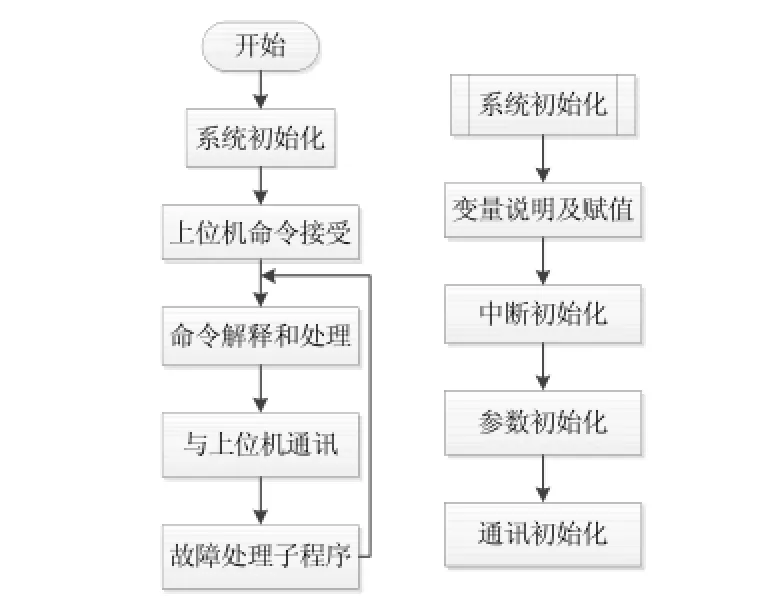
图7 SRD系统主程序及初始化程序
图8给出了开关磁阻电机低速运行时电流斩波控制的流程图,包括判断加电相、开通关断角检测、电流检测、电流限幅比较等。
3.1位置估计及相切换程序
SRM无位置传感器控制采用磁链-电流-位置角度法。根据它们之间的关系,得到转子位置。而实际过程中并不需要转子位置的信息,只需判断相应的换相位置,各相绕组就能轮流导通。因此,转子位置检测就可以简化为换相位置检测,即只需将对应当前电流的换相位置磁链与积分计算得到的估算磁链相进行比较。如果前者大于后者,则换相位置还未到,继续导通当前相;反之,则认为换相位置已到,关断当前相,导通下一相。这就是简化磁链法的思想。
采用最小二乘支持向量机无位置传感器来间接获得SRM转子位置信息,通过实时检测绕组的电压、电流值,经过调理电路,经AD转换端口输入到DSP磁链估算模块,利用最小二乘支持向量机估算出转子位置估计值θˆ和速度估算值ωˆ,根据简化磁链的思想执行相切换控制程序。获得位置信息后,相绕组切换子程序,根据估算的位置值决定当前应当开通的相。当θˆ大于开通角θoff时,导通相绕组;当θˆ大于关断角θoff时,关断相绕组。位置估算流程图如图9所示。

图8 SRM电流斩波流程图

图9 位置估算流程图
3.2速度估算程序

Δθ=15°,另设两次两个特定相邻两个转子位置定时器差值为m,则转速nr为:

为了消除干扰,平滑速度估计值需要采用IIR和FIR组合数字滤波算法,对转速进行数字滤波。计算公式如下:

4 实验仿真结果分析
以低速运行CCC控制和高速运行APC控制相结合的方式进行仿真实验。下面是Matlab仿真波形,其中图10为相电流波形。从图中可以看出,开关磁阻电机启动运行时,绕组电流值受斩波电流限的控制,使绕组电流被限制在190~210A。当转速上升到一定程度后,电机在APC控制下运行,此时电流波形稳定。图11为SRM转矩波形。在启动过程中,由于电流斩波的原因,转矩脉动比较大。当电机进入高速运行时,换相过程中为避免绕组电流进入电感下降区域产生制动转矩,需要提前关断绕组电流,因此也会产生转矩脉动。但于启动过程相比,此脉动要小。
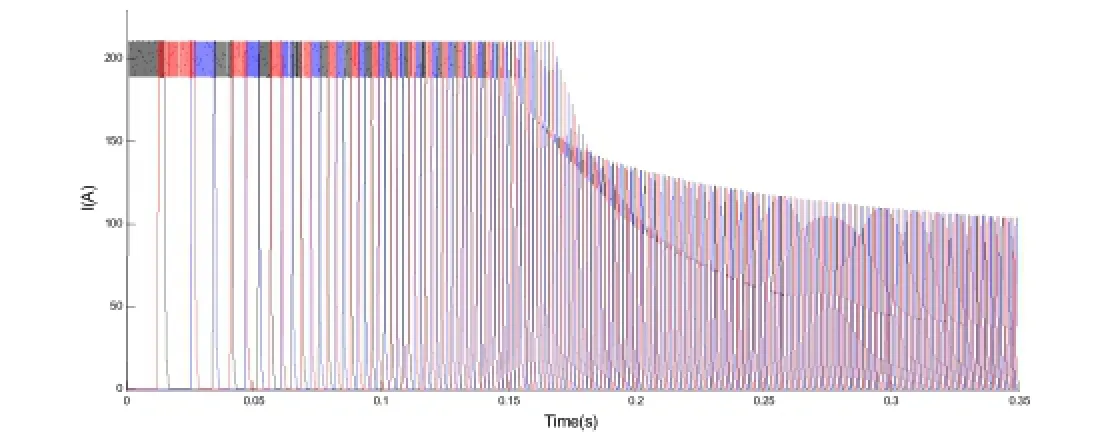
图10 SRM绕组电流波形
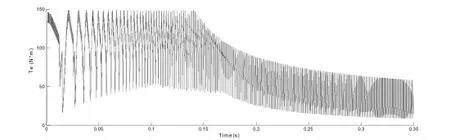
图11 SRM转矩波形
5 总结
本文提出一种基于最小二乘支持向量机的开关磁阻电机转子位置估计的新方法。该方法降低了SRM无位置传感器建模的复杂度、泛化能力强,结果精度高。研究表明,LS-SVM计算速度快、精确度高,能够实现SRM转子位置检测要求。
[1]王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社,1995.
[2]吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2000.
[3]詹琼华.开关磁阻电动机[M].武汉:华中理工大学出版社,1992.
[4]Echenique E,Dixon J,Cárdenas R,et al.Sensorless Control for a Switched Reluctance Wind Generator,based on Current Slopes and Neural Networks[J].Industrial Electronics,2009,56(3):817-825.
[5]夏长亮,王明超,史婷娜,等.基于神经网络的开关磁阻电机无位置传感器控制 [J].中国电机工程学报,2005,25(13):123-128.
[6]夏长亮,谢细明,史婷娜,等.开关磁阻电机小波神经网络无位置传感器控制[J].电工技术学报,2008,23(7):33-38.
Research on Switched Reluctance Motor Test System based on Non Position Sensor
CHEN Yunliang
(secondary professional school,Gaochun,Nanjing 214028)
This paper presents a new method based on least squares support vector machine for switched reluctance motor rotor position estimation and formed a ideal structure of support vector machines can realize nonlinear mapping between the motor current,flux and rotor position,switch reluctance motor rotor position estimation. Complete with the DSP TMS320F28335 as the core control of switched reluctance motor test system hardware design,given chopping current,rotor position estimation,phase switching program flow chart and the speed estimation algorithm in MATLAB,and simulation realization of switched reluctance motor drive system.
no position sensor,switched reluctance motor,system