大型空间桁架天线振动控制及作动器位置优化
2016-09-27罗杰谢兰川张云明路遥刘青林魏薇
罗杰,谢兰川,张云,明路遥,刘青林,魏薇
(西南技术工程研究所,重庆 400039)
大型空间桁架天线振动控制及作动器位置优化
罗杰,谢兰川,张云,明路遥,刘青林,魏薇
(西南技术工程研究所,重庆 400039)
目的 对在轨大型空间柔性桁架天线结构振动进行主动控制及作动器位置优化。方法 采用线性二次型最优控制算法对天线结构进行振动抑制,以系统能量和控制能量的和作为优化性能指标,利用遗传算法对作动器的位置进行优化。结果 在优化配置的两个作动器控制作用下,受到激扰的天线结构振动便在10 s内得到良好得抑制,振动幅值减小了一个量级。 结论 适当地增加作动器数目,恰当地配置作动器的位置能有效抑制柔性天线结构的振动。
空间桁架天线;作动器位置优化;振动主动控制;遗传算法
随着空间无线电技术在军事侦察、空间科学、通信、对地观测等领域的作用日趋重要,空间桁架可展开天线也朝着大型化的方向发展。美国研发的第五代电子侦察卫星甚至已经发展到直径150 m左右[1]。空间大型可展开网状天线这样一个多柔体结构,柔度大、内阻小,在轨工作时会因为姿态调整、动力干扰、太空风、空间飞行碎片等的影响,从而激起低频、非线性、大幅度的复杂剧烈振动,且一旦受到某种激振力的作用,其大幅度的振动要延续很长时间。这不仅影响天线的通信质量,还可能对天线甚至卫星的结构造成破坏,导致卫星发射任务失败[2—3]。因此,大型桁架天线结构的振动抑制和作动器位置优化问题一直是航天结构工程中的重要课题[4]。
国内外对空间柔性桁架天线结构的振动抑制和作动器优化配置进行了各种研究[5—6]。Won等[7]采用内嵌的方式将压电驱动元件安装在空间桁架里,从实验和仿真方面证明了该装置能够抑制桁架结构的前几阶模态。刘相秋[8]提出了一种改进的粒子群优化方法,以系统总能量为性能指标对作动器位置进行了优化配置。王军等[9]在系统可控性Gram矩阵特征值的基础上来描述性能指标,以输入的能量吸收率为优化目标函数的位置优化配置准则,使用遗传算法对作动器的位置进行优化。杨要恩等[10]将智能结构应用到大型可展开天线的“在轨”振动控制中,采用平衡降阶处理方法设计控制器能有效地抑制外界的干扰。
卫星地面试验也不容易模拟卫星在轨状态[11]。为分析研究展开状态下桁架天线结构的振动抑制问题,文中通过数值模拟方法,以系统能量和控制能量两者的和作为优化性能指标,采用遗传算法对布置在天线桁架杆上的作动的位置进行优化,并采用线性二次型最优控制算法控制柔性桁架天线结构的振动。
1 桁架天线结构数值模型
天线结构为复环桁架结构,模型包括周边桁架、索网和支撑臂。其中复环外径为10 m,内径为9 m,展开状态时高2.2 m,索网内置。支撑臂为外径12 cm、内径6 cm的中空筒形梁,长5 m。结构杆件的材料均为不锈钢,索网的材料为尼龙绳。
在ANSYS中建立天线的有限元模型,如图1所示。竖向杆、连接杆、弦杆和两根斜支撑杆使用杆单元LINK180,上下弦加强索和内索网使用索单元LINK180,伸展臂使用梁单元BEAM188,采用质量元MASS21模拟节点的质量。

图1 桁架天线结构有限元模型Fig.1 Finite element model of the truss antenna
上、下索网预拉力为10 N,竖索网预拉力为5 N,环形框上的加强索预拉力为20 N。采用降温法对索网施加预应力,约束天线伸展臂底端节点的所用自由度。结构阻尼采用瑞利阻尼形式,ALPHA 取5.9×10-3,BETA取0.001[12]。
从ANSYS中桁架天线模型导出整体结构的总体刚度矩阵、质量矩阵和阻尼矩阵,在MATLAB中将以上导出的矩阵重新组建天线结构的的数值模型,以便于对其进行结构冲击响应分析和作动器位置优化配置。优化和控制算法中简单取Q=2E3×I,R=I,I为单位矩阵[12]。
2 振动控制及作动器位置优化设计
2.1线性二次型最优调节器设计
实际应用中作动器有多种安装方式,其中一种是将作动器嵌入结构中作为部分或整个结构构件,文中采用沿杆轴向作动器,如图2所示。若天线结构的总自由度为n,则受控结构运动方程可表示为[13]:

式中:M,C,K分别为结构的质量、阻尼、刚度矩阵;u(t)为控制力矩阵;D,E分别为控制力位置矩阵、外激励位置矩阵。
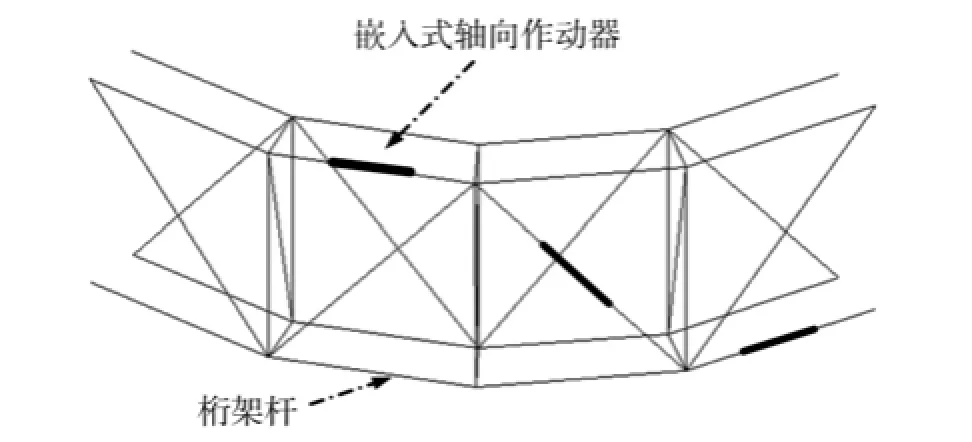
图2 周边桁架上作动器布置Fig.2 Position of actuator on the truss antenna
控制系统采用闭环控制系统,控制力是位移的线性函数。取z(t)=[x(t)x˙(t)]T作为状态向量,则线性定常受控系统的状态空间模型为:

式中:A为系统矩阵;B为作动器位置矩阵;H为外载荷作用位置矩阵;F,G为输出控制矩阵;y(t)为输出观测向量。
对于线性定常系统,求最优控制u使系统的二次性能指标:

取最小值[12],可得到天线结构整体的闭环控制系统的状态方程为:

2.2作动器位置优化性能指标
作动器/传感器采用对位配置的方式,以系统能量和控制能量两者的和作为优化性能指标,式(3)可变换为:

设系统的初始状态x0在n维的单位球面上随机分布,求J关于初始状态x0的数学期望,则有:


由修正后的性能指标建立桁架天线结构作动器/传感器位置优化配置模型为:

式中:μ(L( i), i)为优化后的系统性能指标;i为可配置作动器/传感器的杆件编号;n为可配置作动器/传感器的最大杆件编号。
2.3遗传算法的优化设计
以修正后的系统能量性能指标式(8)作为目标函数,它是关于作动器位置和数目相关的Lyapunov方程的迹,避免了系统初始状态对天线结构作动器位置优化结果的影响。
根据能量性能指标编写适应度函数,优化目标函数基于线性二次型最优控制理论,不同的作动器位置矩阵B对应了不同的适应度值。以周边复环桁架上所有可以安装作动器的杆件为优化配置的解空间,以ANSYS中杆单元编号作为每一根杆件的编号。可布置作动器的杆数为201,优化过程中取初始种群数为50,最大遗传世代数为200,交叉概率取0.8,变异概率取0.1。
3 优化和振动控制仿真
若天线结构的自由端部受到一大小为10 N,方向为(1,1,1)的瞬态冲击力的作用,受激励的结构在x,y,z三方向的响应如图3所示。由于天线结构整体刚度低、阻尼小,在受到外载荷激励时振动幅值大、持续时间长,对天线的通信功能和结构安全很不利。考虑在天线周边桁架杆上优化配置嵌入式作动器来对结构振动进行控制。

图3 天线结构受激励后x,y,z方向响应Fig.3 Antenna vibration at x,y,z when being shocked
采用遗传算法对不同数量传感器/作动器的位置优化配置的结果见表1和图4。随着作动器数目的增加,系统的总能量逐渐降低。从图4中可以看到,随着作动器数目的增加,能量变化曲线的斜率也快速减小,表明振动控制效果不随作动器的增加而线性叠加。

表1 前9个作动器的位置优化结果Table 1 Optimized positions on truss antenna

图4 受控系统结构总能量随作动器数目变化Fig.4 Variation curve of total energy with actuator numbers
根据优化结果,在第80,82号杆中布置作动器对受激结构进行振动控制,受控结构x,y,z三方向的响应如图5所示。对比控制前后的图3与图5可知,在优化控制作用下,结构振动幅值以指数形式降低,结构振动调节时间在10 s以内。取未优化的第19,123杆布置作动器与优化后的80,82杆布置作动器对天线结构z方向振动的控制效果进行对比,如图6所示。优化控制使得结构z向振动的调整时间从优化前的20 s以上缩短为9 s左右,调整周期减少为原来的30%左右,达到较好的振动抑制效果。

图5 两个优化配置作动器控制下结构响应Fig.5 Vibration of antenna controlled by two optimal actuators

图6 优化前后结构振动控制响应Fig.6 Vibration of antenna before and after being controlled
4 结语
大型空间柔性桁架天线结构整体刚度低、结构阻尼小,但其工作环境中的激励载荷十分复杂,天线结构频繁受到激励发生大幅持续的振动。文中的分析包括作动数目、作动器位置等因素对天线结构振动控制的影响,适当增加作动器数目、恰当地配置作动器位置等措施能有效地减小结构整体的能量,从而使结构振动得到良好抑制。
随着传感器/作动器数目的增加,天线结构振动控制效果呈增长趋势。传感器/作动器系统数目的增加,势必增加天线结构的整体质量和控制能量的消耗,增加设计难度。在实际工程应用过程中,应当权衡控制效果与结构整体重量和能源消耗的代价,同时使得优化的作动器位置布置能够保证天线结构质量的协调分布。
[1]梅国宝,吴世龙.电子侦察卫星的发展、应用及其面临的挑战[J].舰船电子抗,2005,28(4):28—30.
MEI Guo-bao,WU Shi-long.Development,Application andChallengeConfrontedwithElectronic ReconnaissanceSatellite[J].ShipboardElectronic Countermeasure,2005,28(4):28—30.
[2]赵保平,孙建亮,蔡骏文,等.航天动力学环境的最新进展与技术展望[J].装备环境工程,2015,12(3):8—14.
ZHAO Bao-ping,SUN Jian-liang,CAI Jun-wen.Recent DevelopmentandProspectofAstrodynamic Environmental Technology[J].Equipment Environmental Engineering,2015,12(3):8—14.
[3]陈凤贵,王胜国,谢志辉,等.空间环境对载人登月活动的影响及保障需求研究[J].装备环境工程,2015, 11(1):77—81.
CHEN Feng-gui,WANG Sheng-guo,XIE Zhi-hui,et al. Research on the Effects of Space Weather and Supporting NeedsinMannedLunarLanding[J].Equipment Environmental Engineering,2015,11(1):77—81.
[4]司洪伟,李东旭,陈卫东.大型网状可展开天线的动力学与控制研究进展[J].力学进展,2008,38(2):167—176.
SI Hong-wei,LI Dong-xu,CHEN Wei-dong.Dynamic and Active Control of Large Flexible Space Truss:A Review[J].AdvancesinMechanics,2008,38(2): 167—176.
[5]刘福强,张令弥.作动器/传感器优化配置的研究进展[J].力学进展,2000,30(4):506—516.
LIU Fu-qiang,Zhang Ling-mi.Advances in Optimal Placement of Actuators and Sensors[J].Advances in Mechanics,2000,30(4):506—516.
[6]罗鹰,段宝岩.星载可展开天线结构现状与发展[J].电子机械工程,2005,21(5):33—37.
LUO Ying,DUAN Bao-yan.The Study on Structure of Space Deployed Antenna[J].Electro-Mechanical Engineering,2005,21(5):33—37.
[7]WON C C,SULLA J L,SPARKS D W.Application of PiezoelectricDevicestoVibriationSuppression[J]. Journal of Guidance Control and Dynamics,1994,17(6): 1333—1338.
[8]刘相秋.改进PSO算法在结构作动器位置优化中的应用[J].力学与实践,2011,33(5):28—32.
LIU Xiang-qiu.Position Optimization of Actuator by Applying Animproved Pso Method[J].Mechanics in Engineering,2011,33(5):28—32.
[9]王军,杨亚东,张家应.面向结构振动控制的压电作动器优化配置研究[J].航空学报,2012,33(3):494—500.
WANGJun,YANGYa-dong,ZHANGJia-ying. InvestigationofPiezoelectricActuatorOptimal Configuration for Structural Vibration Control[J].Acta AeronauticaetAstronauticaSinica,2012,33(3): 494—500.
[10]杨要恩,刘明治,王庆敏.基于智能结构的空间大型可展开天线H∞振动控制[J].南京理工大学学报(自然科学版),2005(S1):118—121.
YANG Yao-en,LIU Ming-zhi,WANG Qing-min.H∞Vibration Control Based on Intelligent Structure for Large-SpaceDeployableAntennas[J].Journalof NanjinUniversityofScienceandTechnology, 2005(S1):118—121.
[11]杨新峰,白照广,杨栋,等.动量轮诱导的卫星地面微振动特性研究以及在轨仿真分析[J].装备环境工程, 2015,12(3):15—21.
YANG Xin-feng,BAI Zhao-guang,YANG Dong,et al. StudyonMicro-vibrationofSatelliteInducedby Momentum Wheels and On-orbit Simulation Analysis[J]. EquipmentEnvironmentalEngineering,2015,12(3): 15—21.
[12]高军虎.展开天线结构动力学和振动控制分析[D].杭州:浙江大学,2012.
GAO Jun-hu.Dynamics Analysis and Vibration Control onDeployableAntennaStructure[D].Hangzhou: Zhejiang University,2012.
[13]容里.压电作动器设计及双层球面网壳结构振动主动控制研究[D].杭州:浙江大学,2008. RONG Li.Design of the Piezoelectric Actuator and Study on Active Structure Vibration Control Mechanism of Double-layer Spherical Reticulated Shell[D].Hangzhou: Zhejiang University,2008.
[14]陈超伟.柔性张拉整体结构振动最优控制及作动器优化配置[D].西安:西安电子科技大学,2012.
CHEN Chaowei.Vibration Optimal Control and Actuator Optimization of Flexible Tensegrity Structures[D].Xi'an: Xidian University,2012.
[15]江洁,李团结.张拉整体结构振动最优控制的作动器优化配置[J].西安电子科技大学学报,2014(1):170—175.
JIANG Jie,LI Tuan-jie.Actuator Placement Optimization ofOptimumVibrationControlforTensegrity Structures[J].Journal of Xidian University,2014(1): 170—175.
Vibration Control of Large Space Truss Antenna and Optimization of Actuator Position
LUO Jie,XIE Lan-chuan,ZHANG Yun,MING Lu-yao,LIU Qing-lin,WEI Wei
(Southwest TechnologyAnd Engineering Research Institute,Chongqing 400039,China)
Objective To conduct active control on the vibration of large space flexible truss antenna structure and optimize the position of actuator.Methods A linear quadratic optimal control algorithm was used to suppress the vibration of the antenna structure.The sum of system energy and control energy was taken as the optimization performance index.The position of actuator was optimized with genetic algorithm.Results The vibration of the antenna structure was well suppressed in 10 s and the vibration amplitude was reduced by one order of magnitude when being controlled by two optimal actuators.Conclusion Appropriately increasing the number of actuators and properly configuring the position of the actuator can effectively suppress the vibration of flexible antenna structure.
space truss antenna;position optimization of actuator;active vibration control;genetic algorithm
2016-03-23;Revised:2016-04-26
10.7643/issn.1672-9242.2016.04.018
TJ06
A
1672-9242(2016)04-0112-05
2016-03-23;
2016-04-26
罗杰(1978—),男,四川南部人,工程师,主要研究方向为装备环境数字化仿真。
Biography:LUO J ie(1978—),Male,from Nanbu,Sichuan,Engineer,Research focus:equipped with digital simulation environment.
