基于Boost变换器的蓄电池稳定输出设计
2016-09-21刘立言龙永红吴煌辉刘贤湖南工业大学电气与信息工程学院湖南株洲412007
刘立言,龙永红,吴煌辉,刘贤(湖南工业大学 电气与信息工程学院,湖南株洲 412007)
基于Boost变换器的蓄电池稳定输出设计
刘立言,龙永红,吴煌辉,刘贤
(湖南工业大学 电气与信息工程学院,湖南株洲 412007)
为了使蓄电池的供电准确稳定,研究了双闭环PI控制算法以及采样数据的校正方法,总结了硬件器件选型和程序控制思路,在一定程度上提高了采样效率与精确性。通过反馈的电流和电压双闭环控制使Boost变换器输出电压稳定。实验结果验证了本方法的合理性。
Boost变换器;数据校正;双闭环PI
0 引言
作为电力电子技术的一个重要分支,开关直流源被广泛的应用于数据通讯、办公自动化设备、军事、计算机等领域。其中蓄电池的输出受外界影响容易产生波动,所以需要DC-DC变换器保证蓄电池的稳定输出。DC-DC变换器的实现相较于传统用模拟电路实现闭环控制,数字化可以简化电路,尤其可以灵活应用控制算法和策略实现各种复杂情况下电路的稳定输出。用软件也能方便的解决器件个体的差异以及温漂等问题。在一定程度上能节约硬件成本。DC/DC变换器稳定的输出是基本要求,因此研究数字化Boost变换器对蓄电池的稳定输出具有重要的意义。
针对BOOST电路输出稳定方面有各方面的研究。文献[1]从交错并联技术方面入手,扩大了电路的稳定域范围,减小电流和电压纹波。文献[2]里通过4个独立的开关管,形成4个独立的占空比控制,定义3种不用的功率运行模式,进而控制Boost变换器的输出。文献[3]从电路的拓扑角度出发,让变换器工作于DCM模式,实现开环控制输出功率。文献[4]通过直接控制电感电流从而控制输出电压的方法,实现了消除输出电压稳态误差。文献[5]采用单闭环控制给蓄电池供电。
本文设计了一种给蓄电池供电的双闭环控制的Boost转换器,使控制响应时间缩短,同时输出电压能稳定在设定值。硬件采用DSP芯片控制电路,相较于专用芯片控制的Boost转换器,能够使用程序方便的实现智能输出。主电路使用线性光耦芯片进行主电路与控制回路的隔离。为了够降低采样时的损耗与提高准确度,使用了电流霍尔传感器,同时设计了相对应的采样电路和采样程序。为了稳定而快速的控制电路的输出电压,在控制PWM占空比的程序中使用双闭环PI算法。通过实验样机的测试证实上述设计的有效性。
1 系统设计分析
1.1 硬件设计
本文的硬件设计思路如图1所示,它由Boost主电路、保护电路、驱动电路、采样电路组成。其控制方式采用双闭环PI控制。

图1 Boost变换器电路图Fig.1 Circuit diagram of Boost converter
其中电压采样模块是在电路的输出端用分压电阻进行采样。为了隔离主电路与采样电路,加入电压跟随器作为中间级。在中间级之后,为了保证数字电路的可靠采样,在一部分信号干扰较为严重或者被采样电压的等级过高时进行隔离采样。隔离采样一般可以用霍尔传感器实现隔离,将采样电阻的电流通过霍尔传感器转化为电压信号,因此在采样的过程中造成了一定损耗,本文不予采用。另外一种光耦隔离芯片在数字信号的隔离中也经常用到,但是一般的光耦芯片在一定情况下有非线性传输特性,传输特性会在一定程度上受周围温度的影响,因此本文采用线性光耦[6-7]。它能简化模拟信号传输中的隔离电路设计,并且利于提高DSP的采样精度。
电流采样一般有两种方式,一种是使用采样电阻,通过采样电阻的电流信号转为电压信号。另一种是霍尔传感器,直接将电流信号转换成电压信号[8]。由于采样电阻会导致电路的损耗增加,因此选择更为高效,精度更高的霍尔传感器。霍尔电流传感器又分为闭环模式和开环模式。为了简化电路,同时提高精度和线性度,本文选择开环模式的霍尔传感器,即传感器的输入为电流,输出为电压。但是此传感器没有隔离作用,为了防止主电路对DSP的冲击,在霍尔传感器与DSP之间要加上一个隔离模块。
电流采样的输出电压可能会超过DSP采样电压范围,所以需要其进行调制才能输入到DSP的采样通道。调制方法有两种:第一种是偏置电路,将输出电压通过硬件电路对其进行减法运算,使电压降到DSP采样可接受范围同时不影响采样灵敏度,但是其实现需要较多元器件造成成本升高。第二种是将输出电压经过分压的形式进行降压。为了保证传输稳定,需要在分压前加上电压跟随器。此种方法实现简单,成本低,但相对会降低一定精度。本文采用第二种方式实现DSP采样。
1.2 软件设计
如图2为程序设计的流程图。本文采用DSP完成整个系统的控制。AD采样为系统的反馈环节包括电压和电流的反馈,采样进DSP的数据经过内部的分析转换成实际的电压和电流值。通过采样得到的电流值和电压值进行判断模糊PI处理,得到一个控制量,DSP的事件管理器将控制量转换成PWM。DSP输出的PWM经过驱动电路后控制MOS管的通断,最终实现Boost电路的双闭环控制。

图2 程序设计流程图Fig.2 Programming flow diagram
PWM程序分为两个部分,一部分是开环调试时执行,另一部分是闭环控制时执行。
开环调试在DSP的事件管理器初始化程序中设定PWM的周期以及占空比,使Boost电路输出恒定电压,用于检测电压和电流采样结果,检验校正效果,以及确定电路正常的工作条件。
闭环控制时,PWM根据PI计算出的值,在周期中断的子程序中更新新的占空比,使输出电压稳定。此时,DSP的PWM输出不再是初始化时的固定占空比,而是经过电压PI以及电流PI修正过后的占空比,实现电路的反馈控制。
电路在实际工作过程中,刚启动时由于电容的存在,会有较大的冲击电流,另外DSP在初始化时会输出高电平导致MOS管开通使输入短路,因此必须要加上软启动电路才能正常工作。为了防止过流过压,当采样到异常数据时会切断主电路上的继电器,同时停止PWM输出。
2 数据采集与处理
2.1 AD采样
由于采样条件的不稳定,采样数据不可避免产生误差,此误差为过失误差,不真实的数据会对控制效果造成不良影响。采集到的数据经过数据校正后,其有用的数据会增加。因此对于数据的校正是十分必要的。过失误差一般可分为3种方法检查。理论分析法可能会忽略一些潜在的潜在的误差,硬件冗余法对于过多变量会造成成本增加,统计检验法对于硬件要求不高,便于实时运行。所以本文采用统计检验法进行采样数据的处理。
由于采样过程中干扰信号的存在,导致采样得到的数据有波动,甚至出现异常数据,因此本文根据实际的采样情况选择限幅平均滤波法滤波。相较于其他滤波方式,它能克服偶然性的干扰,同时提高数据的平滑性 。将滤波后的值做为实际的采样值进行校准处理。这样就能滤去偶然产生的较大干扰以及使数据平滑的过渡,防止出现过大的输出波动。
经过滤波后的采样值通过校正后即可作为有效数据进行PI计算。经过校正后作出DSP采样通道实际电压和误差电压的分布图如图3。

图3 采样通道实际电压与误差电压分布图Fig.3 The distribution of actual voltage and error voltage
图3中X轴为给定的采样电压,Y轴为给定电压减去采样电压。可以看出DSP的采样通道在中段也就是0.7V-1V之间的误差较小,采样精确,但是在低电压和高电压,尤其是在采样2V以上的电压时误差特别大。根据误差范围的不同分别做出各个区间的输出对应输入的函数,对于每个函数是否更符合数据的变化规律有一个值,这个值为拟合度R2,如果R2越接近1则表明此函数越符合数据的变化规律。最终采样通道校正分为7段,拟合度R2在0.9892-1之间。截取其中一段校正曲线如图4。为了能确保最终Boost电路输出误差在0.1V以内,上述采样校准数据每隔0.05V采样一次。

图4 校正曲线图Fig.4 Correction chart
本文在DSP的AD采样程序中,先将采样得到的电压信号通过计算得出电压值,将此电压值经过滤波后进行分段校正处理,即根据不同的误差电压值,进行校正计算,再将校正后采样通道的值根据电压采样电路中的分压电路转化为实际的输出电压,以及校正后的采样通道的值根据霍尔电流传感器电流对应电压的关系转化为实际的电流值。最终将这两个实际值作为PI控制的输入量。
2.2 数字PI程序
为了实现系统快速并且精确的控制,需要采用相应的算法来达到控制要求,本文选择用工程中常用的数字PI算法来实现控制。PI控制可分为位置式和增量式,由于位置式PI在积分作用下饱和难以退出,会导致系统响应缓慢,而增量式可以解决此问题。因此本文选择增量式PI。并分别设计了数字比例控制器和数字积分控制器[9]。控制采用双闭环的方案,将电流环作为内环使响应速度提高,电压换作为外环用来稳定输出电压。为了使输出信号与反馈信号一致,程序中将电压与电流信号转换为了占空比信号。在占空比输出阶段,为了防止过压和过流,加入了限制占空比程序,避免外界过大的干扰,确保控制过程中的各项性能稳定[10]。
3 实验结果分析
实验主电路为Boost升压电路,在负载为10欧,蓄电池输入3.3V,设定输出5V的情况下,单独的电流内环PI控制输出波形如图5,电压外环和电流内环组成的双闭环PI控制输出波形如图6。可以看出在单独的电流环基础上加入电压外环以后输出电压控制得更加稳定。
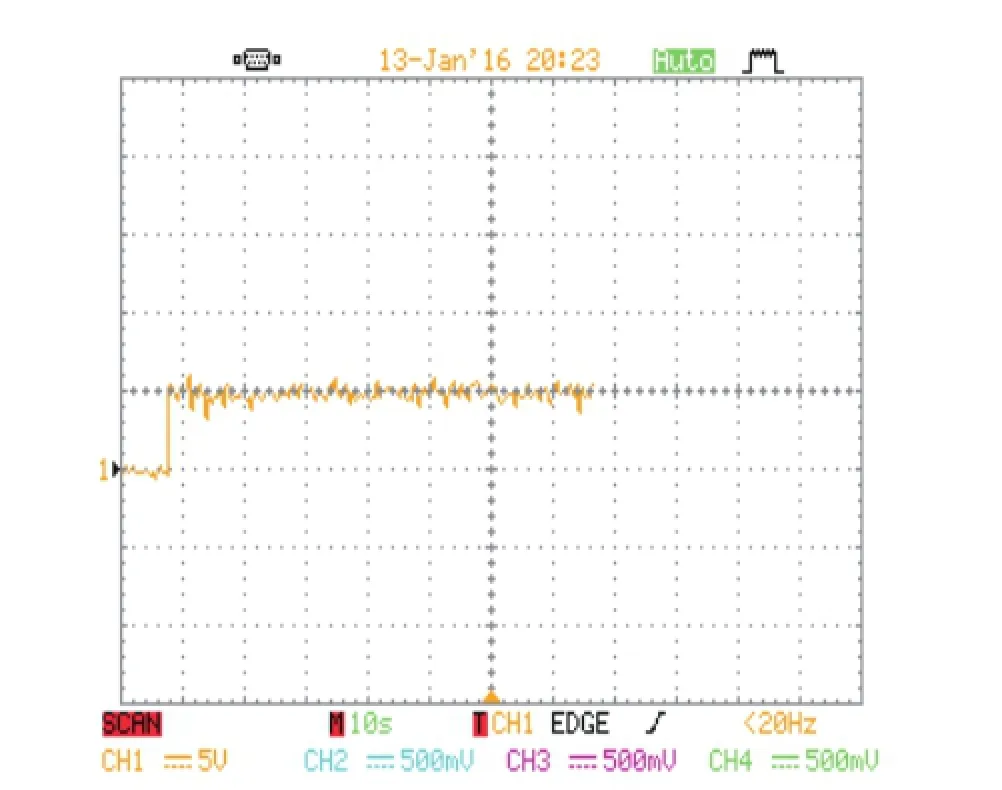
图5 独立电流环PIFig.5 Independent current loop PI

图6 电压环外环和电流内环PIFig.6 The voltage loop and current loop PI
在PI的调试过程中,调试的方法是先调电流内环,再调电压外环。表1为PI调试过程中的参数。
根据表1,得出最终的电流环PI参数为:I=0.3,P=0.00009。电压环PI参数为:I=0.005,P=0.0031。

表1 PI调试过程中的参数Tab.1 The PI parameter in the process of debugging
系统在10欧负载下,图7为响应时间,图8为稳定后的输出波形,可以看出响应时间在50ms,误差在0.2V以内。
4 结语
本文设计的Boost升压电路,使用线性光耦进行主电路与控制电路的隔离,电流采样的电路中用霍尔传感器将采样电流转为电压,降低了电路损耗。在DSP程序中将采样进的电压值还原为实际的电压和电流值进行PI控制。控制环节采用电流、电压瞬时值控制,控制算法为双闭环形式的增量式PI。为了确保控制的稳定,防止误扰动,提高控制的各项性能,在输出占空比以及PI增量处进行了限幅。电路控制的核心是TMS320F2812芯片,最终稳定的升压功能能够很好的满足蓄电池供电的要求。

图7 响应时间Fig.7 Response time

图8 误差值Fig.8 Error value
[1] 谢玲玲,龚仁喜,李畸勇.光伏发电最大功率点跟踪交错并联Boost变换器的动力学特性分析[J].中国电机工程学报,2013,33(6):38-45.L Lxie, Rx Gong, J Q Li.Analysis of the Dynamical Characteristics of the Interleaved Boost Converter in Maximum Power Point Tracking for Photovoltaic Power[J].Proceedings of the CSEE,2013,33(6):38-45.
[2] Farzam Nejabatkhah Saeed Danyali, Seyed Hossein Hosseini, Mehran Sabahi, Seyedabdolkhalegh Mozaffari Niapour.Modeling and Control of a New Three-Input DC-DC Boost Converter for Hybrid PV/FC/Battery Power System[J].IEEE Transactions on Power Electronics,2012,27(5): 2309-2324.
[3] 吴红飞,古俊银,张君君,等.高效率高增益Boost-Flyback直流变换器[J].中国电机工程学报,2011,31(24):40-45.H F Wu, J Y Gu, J J Zhang, et al.High Efficiency High Step-up Boost-Flyback DC/DC Converter[J].Proceedings of the CSEE,2011,31 (24):40-45.
[4] 帅定新,谢运祥,王晓刚, 等.Boost变换器非线性电流控制方法[J].中国电机工程学报,2009,29(15):15-21.Dx Shuai, Yxxie,x G Wang, et al.Nonlinear Current Control Method for Boost Converter[J].Proceedings of the CSEE, 2009,29(15):15-21.
[5] 姚立波, 江笑文.光伏蓄电池供电的Boost转换器输出稳压设计[J].自动化仪表,2015,36(12):81-86.L B Yao,x W Jiang.Design of Output Voltage Stability of Photovoltaic-battery-powered Boost Converter[J].Process Automation Instrumentation, 2015,36(12):81-86.
[6] 林如意,黄继业,高明煜, 等.HEV动力电池组数据采集系统设计[J].电子器件,2011,34(5):576-579.R Y Lin, J Y Huang, M Y Gao, et al.HEV Battery Powered Data Acquisition System[J].Chinese journal of Electron Devices,2011,34(5):576-579.
[7] 李平,王科,玉梅, 等.LED 电流/电压特性和光致发光性能参数的联系[J].新型工业化,2011,1(5):42-51.P Li,K Wang,M Yu, et al.Connections of current/voltage characteristics and photoluminescence performances in LEDs[J].The Journal of New Industrialization,2011,1(5):42-51.
[8] 李振森.单级PFC反激式LED驱动电源设计与研究[D].杭州:杭州电子科技大学.2010.Z S Li.Dissertation Submitted to Hangzhou Dianzi University for the Degree of Master [D].Hangzhou :Hangzhou Dianzi University.2010.
[9] 孙大鹰,徐申,孙伟锋, 等.Buck型DC-DC变换器中数字预测模糊PID控制器的设计与实现[J].东南大学学报:自然科学版, 2014(5):897-901.D Y Sun, Sxu, W F Sun, et al.Design and implement of digital fuzzy PID controller with prediction algorithm for Buck DC-DC converter[J].Journal of southeast university (Natural Science Edition),2014(5):897-901.
[10] 帅定新.单相全桥逆变器状态反馈精确线性化控制[J].新型工业化,2014,4(4):51-57.Dx Shuai.State Feedback Exac Linearizaion Control of Single-Phase Full-Bridge[J].The Journal of New Industrialization,2014,4(4):51-57.
Design of Ouput Voltage Stability for Battery Based on Boost Converter
LIU Li-yan, LONG Yong-hong, WU Huang-hui, LIUxian
(College of Electrical & Information Engineering Hunan University of Technology, Zhuzhou 412007, China)
In order to make the battery power supply is stable,sampling selection of hardware device and process control ideas is given after studying the double closed-loop PI control algorithm and sample data correction method,this improves the efficiency and accuracy to some extent.Design of double closed-loop PI regulator so that the output voltage stability.Experimental results confirm the validity of the method.
Boost converter; Data correction; Double closed-loop PI
10.19335/j.cnki.2095-6649.2016.03.001
LIU Li-yan, LONG Yong-hong, WU Huang-hui, et al.Design of Ouput Voltage Stability for Battery Based on Boost Converter[J].The Journal of New Industrialization, 2016, 6(3)∶ 1-6.
国家自然科学基金项目(61503131)
刘立言(1990-),男,湖南工业大学硕士研究生,主要研究方向:现代电力电子技术及其系统;龙永红(1968-),男,教授,主要研究方向:模式识别与人工智能,智能仪器;吴煌辉(1991-),男,硕士研究生,主要研究方向:现代电力电子技术;刘贤(1993-),男,硕士研究生,主要研究方向:现代电力电子技术
本文引用格式:刘立言,龙永红,吴煌辉,等.基于Boost变换器的蓄电池稳定输出设计[J].新型工业化,2016,6(3):1-6.