临空高超声速飞行器地基拦截引导需求分析*
2016-09-21郭相科高嘉乐
孙 文,王 刚,韦 刚,郭相科,高嘉乐
(空军工程大学防空反导学院,西安 710051)
临空高超声速飞行器地基拦截引导需求分析*
孙文,王刚,韦刚,郭相科,高嘉乐
(空军工程大学防空反导学院,西安710051)
NSHV具有速度快、隐身性好、突防能力强等特点,对传统防空反导体系提出了巨大挑战,对国家安全构成了重大威胁。针对此类目标拦截引导难度大的特点,分析了地基雷达在地球曲率影响下引导能力的局限性;具体讨论了武器系统对NSHV的拦截引导需求,分析了地基雷达引导能力与需求的矛盾关系;基于上述分析,给出了天基、临空基、空基和地基探测平台协同引导的解决方案,并结合实例对协同引导的过程和能力进行了分析。此研究对于未来应对NSHV的威胁具有一定的理论指导意义。
临空高超声速飞行器,地基雷达,引导需求,协同引导
0 引言
临空高超声速飞行器(Near Space Hypersonic Vehicle,NSHV)指飞行高度在20 km~100 km,飞行速度在5Ma~25Ma的一类飞行器,主要有空天飞机、临空无人飞行器、超高速巡航导弹等[1-2],具有飞行速度快、隐身性能好、打击精度高、攻击范围广等特点[3],主要执行兵力投送、精确打击和战略威慑等任务[4],成为未来战争的杀手锏。
NSHV的拦截引导需求分析主要是指武器系统拦截NSHV时对其精确实时信息的需求情况分析,是实现探测→跟踪→拦截闭环过程的重要环节。目前,对于NSHV的拦截引导,可行性手段主要是依靠地基雷达的探测引导,而地基雷达受地球曲率影响尤其严重,难以探测超出直视距离以外的飞行器[5],导致NSHV速度、高度及系统反应时间变化时,会影响武器系统的拦截距离[6]。改进方式主要是依靠地基探测平台进行优化组网、增大功率、改进探测方式等,难以满足拦截引导的需求[7-8]。本文在详细分析地基雷达引导能力和不同情况下武器系统拦截引导需求的基础上,总结出实际能力与需求的矛盾关系,提出了借助更具有探测优势的天基、临空基和空基探测平台与地基探测平台协同引导的解决思路,满足未来武器系统对NSHV的拦截引导需求。
1 地基雷达引导能力分析
地基雷达的技术发展较为成熟,是未来引导武器系统拦截NSHV的可行性手段,在不考虑目标运用、光电特性等前提下,分析地球曲率对其引导能力的影响。

图1 视线盲区示意图
地球曲率主要影响探测角度,使地基雷达对目标探测时存在一定的视线盲区[9]。视线盲区如图1所示,盲区高度的计算公式如下:

其中,D为目标与雷达的距离,D'为目标与雷达在地球表面上的投影距离,D≈D',R是地球的半径,R'为考虑雷达波在大气中折射的地球等效半径,R'≈4/3R。
在标准大气压下,地基雷达对目标的探测距离公式如下:

其中,h1是地基雷达的高度,h2是目标的高度。通过计算可以等效为:

地基雷达的高度较低可以近似忽略,得到探测距离与目标高度的关系如图2所示。

图2 目标高度与雷达探测距离的关系
典型高度下探测距离如表1所示,由表可知,目标的飞行高度越低,地基雷达的探测距离越近,受地球曲率的影响对NSHV的最远探测距离为1 300 km。
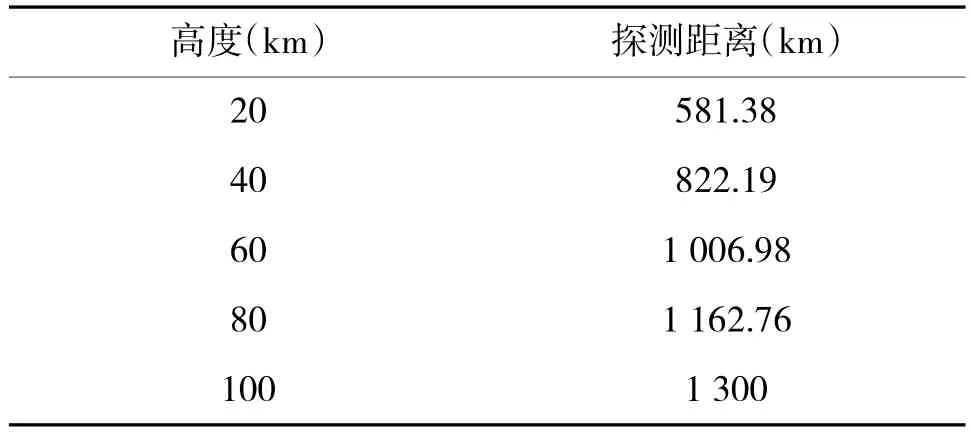
表1 高度与探测距离的关系
2 武器系统拦截引导需求及矛盾分析
目前,没有专门拦截NSHV的武器系统,在此,以典型防空反导武器系统为依据,假定未来拦截NSHV的武器系统所具有的性能[10-11]。典型的防空反导武器系统主要有PAC-3、THAAD和SM-3等,具体性能参数[12-13]如表2所示。综合考虑武器系统的性能参数和NSHV的飞行特性,以及战场情况下传输时延和人机交互的影响。以THAAD武器系统为例,假定,拦截弹的平均速度V=1.2 km/s,拦截线L=200 km,武器系统反应时间t1=30 s,整体反应时间t2=3.5min。
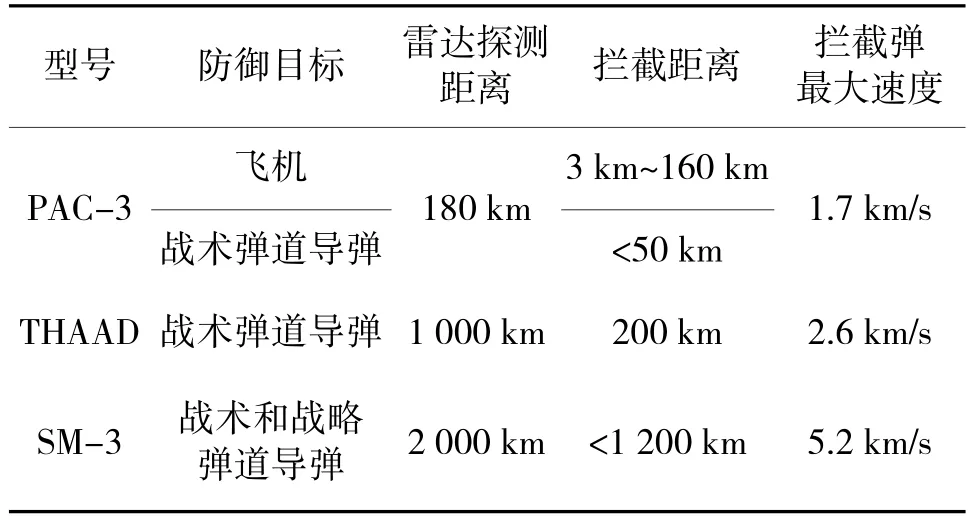
表2 武器系统性能参数
2.1不同情况下武器系统拦截引导需求分析
从拦截角度出发,分析情况1指定拦截距离(200 km)的引导距离;情况2考虑武器系统反应时间(30 s)计算所需的引导距离;情况3考虑整体反应时间(3.5min)计算所需的引导距离。得到不同情况下速度与所需的拦截引导距离关系如图3所示,典型速度下所需的引导距离,如下页表3所示。
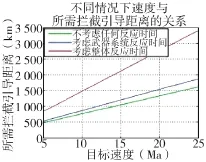
图3 不同情况下速度与拦截引导距离关系
由下页表3可知,随着速度的增加、反应时间的增长,所需的引导距离不断增大,完全满足所有的情况,所需的引导范围为483.6 km~3 404.5 km。
2.2引导需求与地基雷达引导能力矛盾分析
地基雷达受地球曲率的影响,对不同情况下NSHV的引导情况如表4所示。

表3 不同情况下典型速度所需的拦截引导距离
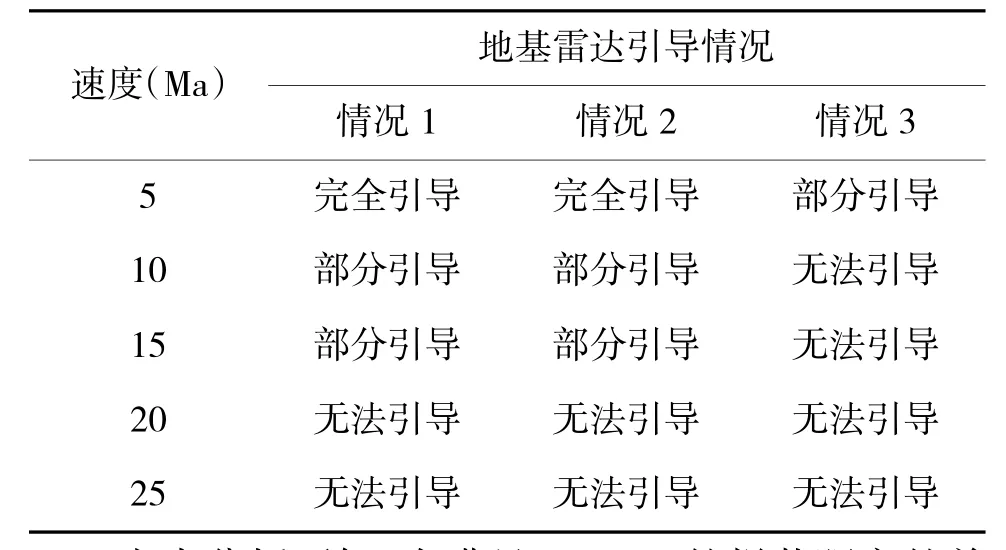
表4 不同情况典型速度下地基雷达的引导情况
由表分析可知,在满足200 km的拦截距离的前提下,随着情况的复杂、速度的增加,地基雷达的引导能力在不断被压缩;情况1下所需的引导范围484 km~1 618 km;情况2下所需的引导范围535 km~1873km;情况3下所需的引导范围841km~3405km,而地基雷达实际的引导距离580 km~1 300 km难以有效覆盖所需的探测引导范围。
综上所述,由于NSHV速度的增加,系统反应时间的增长,武器系统的引导需求越来越大,依靠地基雷达的探测能力不能够使拦截弹在200 km处拦截NSHV。为了解决引导需求与引导能力之间的矛盾,需要考虑借助天基、临空基和空基等其他探测平台进行协同引导。
3 拦截引导需求的实现途径
未来将主要通过借助天基、临空基、空基探测平台与地基探测平台协同引导的方式,来增大引导的距离,满足武器系统的对NSHV拦截引导需求。
3.1各探测平台性能分析
(1)前置雷达作用分析
由图4分析可知,对于20 km~100 km高度飞行的目标,前置雷达相比武器系统配属的地基雷达可以更早探测到目标信息,为拦截留下充足的准备时间;前置雷达比地基雷达的位置前移,可以在更远的距离探测到目标,减少地球曲率的影响;前置雷达的部署受地理限制较大,但是其引导精度较高,可以为拦截提供更加精确的目标信息。
(2)天基、临空基和空基探测平台性能分析
天基探测平台的高度大约在1000 km~2800 km,临空基探测平台的高度为20 km,空基探测平台分为8 km高的预警飞机和3 km高的飞艇两种类型[14],其探测性能仿真如图5~图8所示。
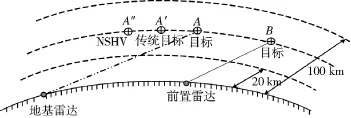
图4 地基雷达和前置雷达对目标的探测示意图
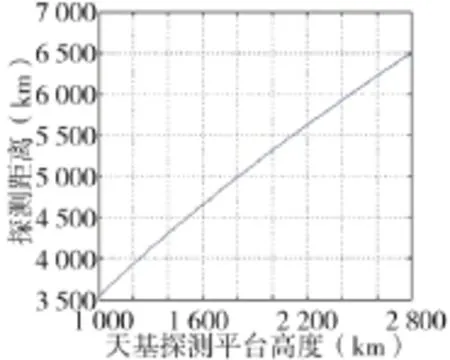
图5 天基探测平台探测距离与平台高度关系
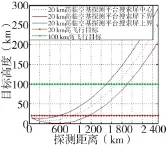
图6 临空基探测平台探测距离与目标高度关系

图7 8 km空基探测平台探测距离与目标高度关系

图8 3 km空基探测平台探测距离与目标高度关系
根据各个探测平台的性能仿真图,得到各平台在不同情况下引导的目标特性,如下页表5所示。在考虑直视距离的情况下,由表分析可知,天基探测平台可以对任意NSHV进行引导,临空基在情况1和情况2下对任意NSHV的进行引导,空基探测平台只能对一定速度范围的NSHV进行引导;在引导精度及效费比方面,空基最好,临空基次之,天基最差;各平台进行协同探测可以满足引导需求。
3.2多平台协同引导过程分析
不同探测平台在对NSHV的探测时段、距离和体制方面具有很强的优势互补性,为了最大限度地发挥各个探测平台的性能,需要各个探测平台协同工作。天基探测平台通常在目标的助推段最先发现目标;临空基、空基平台探测到的目标信息,为地基探测平台的搜索提供引导信息;前置雷达主要是增大探测距离、提高引导精度。临空基、空基和地基探测平台在探测距离上的互补性如图9所示。

表5 不同情况下各平台引导的目标特性
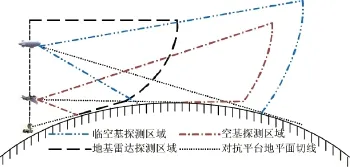
图9 临空基、空基探测平台与地基雷达在距离上的互补性示意图
天基、临空基、空基探测平台与地基探测平台协同引导过程如图10所示。
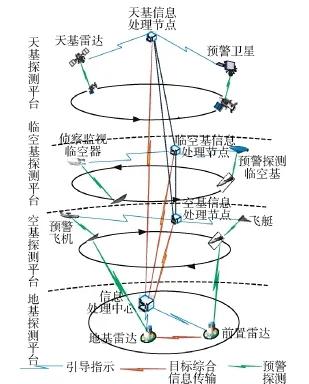
图10 天基、临空基、空基探测平台与地基雷达的协同探测过程
由图10分析可知,天基探测平台探测距离最远,可以在助推段或更早时刻探测到NSHV,将目标信息通过天基信息处理节点传递给信息处理中心;临空基、空基信息处理节点根据信息处理中心的指示调整各自探测器状态,对NSHV进行连续探测,将信息反馈到信息处理中心;信息处理中心对地基探测平台进行探测引导,地基探测平台及时调整雷达的波束指向,对预报空域进行重点的搜索,前置雷达将获取的高精度NSHV信息传递给地基雷达。地基雷达即使自身没有发现目标,也已经获取了目标的准确信息,能够对武器系统进行拦截引导。各探测平台可以通过信息处理中心和信息处理节点共享其他平台探测到的信息,另外,要根据NSHV的具体情况,灵活进行各个探测平台的组合使用。
3.3多平台协同引导能力仿真分析
以美军的HTV-2为例,具体介绍多平台协同引导的能力。HTV-2的飞行特性如表所示。
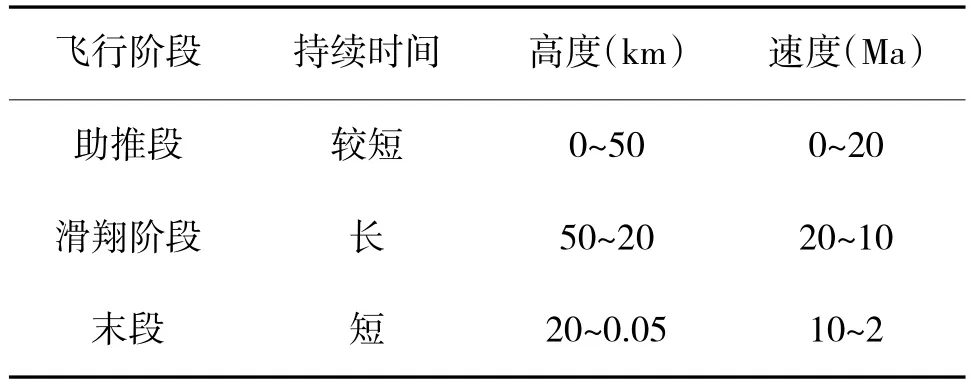
表6 HTV-2的飞行特性
假定,在情况1下,HTV-2从4 000 km以外的A点飞往B点,在飞行过程中,各探测平台对其引导过程如下页图11所示。
由图11分析可知,在HTV-2飞行助推段距B约为3 500 km~2 900 km的范围,主要由天基探测平台探测;在HTV-2滑翔的初始段距B点为3000 km~2 400 km范围,由天基和临空基共同探测,滑翔段的大部分区域距B点约为2 600 km~1 200 km,由临空基和空基探测平台进行探测;在HTV-2的滑翔段的后半部分和末段距B点约为15 000 km~0 km范围,主要是空基和地基探测平台进行探测。其中,目标信息的传输流程遵循处理节点与处理中心的传输准则,信息处理中心将HTV-2综合信息传递给地基雷达,引导武器系统进行拦截。
通过分析可以得到天基、临空基、空基探测平台与地基探测平台协同引导的优势如下:
①有助于减少地球曲率的影响;
②缩短搜索发现目标的时间;
③提升对目标的引导精度;
④提高对目标的发现概率。
综上所述,天基、临空基、空基探测平台与地基探测平台组成的协同引导方式对NSHV进行探测引导时,能够覆盖84 km~3 405 km的探测范围,实现在3种情况下对任意NSHV的拦截引导。

图11 多平台对HTV-2的协同引导过程
4 结论
临空高超声速飞行器的拦截引导已经成为攻防体系对抗的重要组成部分,对未来战争的胜负具有至关重要的影响。在传统防空反导体系的架构下,地基雷达的引导能力不能够有效满足武器系统的拦截引导需求,需要采用天基、临空基、空基探测平台与地基探测平台协同引导的方式,共同完成对NSHV的拦截引导。本文的研究对于构建NSHV防御体系,应对NSHV威胁具有重要指导意义,下一步研究的重点将是如何发挥天基、临空基、空基和地基等探测平台协同引导的最大效能。
[1]李淑艳,任利霞,宋秋贵,等.临近空间高超声速武器防御综述[J].现代雷达,2014,36(6):13-18.
[2]张海林,周林,马骁,等.临近空间飞行器发展现状及军事应用研究[J].飞航导弹,2014(7):3-7.
[3]CHEN M,WU Q X,JIANG C S,et al.Guaranteed transient performance based control with input saturation for near space vehicles[J].Information Sciences,2014,57(4):1-12.
[4]邢继娟,李伟.高超声速飞行器发展及作战效能初探[J].军事运筹与系统工程,2011,25(4):41-46.
[5]张国华.临近空间目标探测分析[J].现代雷达,2011,33 (6):13-16.
[6]包云霞,张维刚,李君龙,等.临近空间武器对预警探测制导技术的挑战[J].现代防御技术,2012,40(1):42-47.
[7]LIU LP,ZHANGZQ,YUDR,etal.Comparison ofprecipitation observations from a prototype space-based cloud radar and ground-based radars[J].Advances in Mospheric Science,2012,29(6):1318-132.
[8]陈大庆,刘丹,张哲,等.临近空间飞行器地面雷达组网优化仿真分析[J].飞行器测控学报,2012,31(6):27-31.
[9]叶文,范洪达,朱爱红.无人飞行器任务规划[M].北京:国防工业出版社,2011:53-55.
[10]白宏,张廷玖,周亚红.抗击临近空间超声速飞行器对策研究[J].现代防御技术,2014,42(6):22-27.
[11]刘彬,李为民,别晓峰,等.超声速巡航导弹目标的拦截策略探析[J].飞航导弹,2014(1):22-27.
[12]原晓波,王昆.美军PAC-3系统导弹防御能力评估[J].科技信息,2010(1):28-29.
[13]陈士涛,杨建军,马丽.末段高空区域防御系统及其作战部署[J].飞航导弹,2011(5):62-65.
[14]汪连栋,曾勇虎,高磊,等.临近空间高超声速目标雷达探测现状与趋势[J].信号处理,2014,30(1):72-85.
[15]邢永刚,唐硕.高超声速巡航飞行器纵向气动特性分析[J].火力与指挥控制,2011,36(2):112-114.
Ground-based Intercepting GuidanceDemand Analysisof NSHV
SUNWen,WANGGang,WEIGang,GUOXiang-ke,GAO Jia-le
(School of Air and Missile Defense,Air Force Engineering University,Xi’an 710051,China)
NSHV has the characteristics of high-speed,well-stealth performance,powerfulpenetration ability and so on,that puts huge challenges to the traditional air defense anti-missile system and forms great threat to the national security.Because of the difficult guidance,this paper analyzes the ground-based radar’s limitation under the curvature of the earth.It talks about the weapon system’s guidance demand and analyses the contradictory relationship between the groundradar’s guidance ability and the demand.Based on the analyses,this paper puts forward the collaborative guidance way about space-based,near space-based,air-based and ground-based exploring platform and analyzes the collaborative guidance’s process and ability with example.The study of this paper has a great theoretical guiding significance to dealwith NSHV in the future.
NSHV,ground-based radar,guidance demand,collaborative guidance
V448;TJ761.5
A
1002-0640(2016)08-0020-05
2015-06-25
2015-07-23
国家自然科学基金(61272011);国家自然科学青年基金资助项目(61102109)
孙文(1992-),男,山东青州人,硕士研究生。研究方向:临空高超声速飞行器引导需求。
