火控相控阵雷达的时间资源管理算法
2016-09-20戴奉周刘宏伟西安电子科技大学雷达信号处理国家重点实验室陕西西安710071
秦 童,戴奉周,刘宏伟,方 明(西安电子科技大学雷达信号处理国家重点实验室,陕西 西安710071)
火控相控阵雷达的时间资源管理算法
秦 童,戴奉周,刘宏伟,方 明
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071)
对于火控相控阵雷达,可以灵活地调整波束的指向方向,从而调整雷达用于跟踪的时间资源。针对这样的特性,提出了一种雷达用于跟踪的时间资源的管理算法,以提升雷达最大可跟踪目标的数量。该文以概率密度函数来描述雷达对目标的跟踪误差,综合考虑了测距与测速精度对跟踪误差产生影响。而后,采用马尔可夫决策的方法,对雷达照射目标的驻留时间与重访时间间隔进行求解。仿真结果表明,对于雷达场景中的目标数量较大情况下,相对于传统的雷达时间资源管理方法,该文提出的方法在保证跟踪精度符合要求的前提下,能够有效提高雷达最大可跟踪目标的数量。
火控相控阵雷达;时间资源管理;马尔可夫决策过程
网址:www.sys-ele.com
0 引 言
近年来,相控阵雷达技术已经取得了快速的发展。这种类型的雷达可以灵活地改变发射波的照射方向,可以根据目标的方向调整电磁波的发射方向与驻留时间。这些特性为我们提供了管理、优化雷达资源的可能性,进而可以对驻留时间、重访时间与发射功率等雷达资源进行合理的分配。进而达到节约雷达消耗功率,提高测量、跟踪精度,提高最大跟踪目标的数量,节约时间消耗等效果。
目前已有一定的关于雷达资源优化的研究工作,主要包括对雷达发射功率的优化与电磁波照射目标的驻留时间的优化。对于雷达发射功率资源的管理,目前的一部分的研究[1-6],集中在采用跟踪滤波的协方差或克拉美罗界作为评价函数,利用最优化方程的方法对雷达的功率资源进行优化。而对于时间资源的管理,主要集中在调节雷达照射目标的驻留时间方面。例如文献[7]在雷达时间资源有限的条件下,按照目标的优先级与威胁程度,对时间资源进行调整。文献[8]以雷达对目标的跟踪精度作为评价函数,进而调整驻留时间。文献[9-10]则是根据信噪比的变化与多个目标之间的信噪比比例,综合调整驻留时间、发射功率等参数。而文献[11-15]则是根据目标的跟踪滤波的协方差作为评价函数,对雷达时间资源与功率资源进行联合的优化。
对于单波束火控相控阵雷达,常常需要对多个目标进行跟踪,如果目标的数量超过雷达目前可以跟踪的最大数量,则会对雷达产生巨大的威胁。本文希望在不改变雷达硬件设施,消耗雷达时间、功率资源不变的情况下,通过对场景进行学习,获取目标信息,调节、管理雷达资源,从而提高雷达可以跟踪目标数量。
目前现有的雷达主要利用回波的多普勒信息,对目标进行测速。如果雷达照射某个目标的驻留时间越长,可以提取得到的多普勒信息越多,测速精度则越高。获得目标精确的速度的测量值,对于提高跟踪目标的精度有着巨大的帮助。然而在目前现有的研究中,对于目标跟踪精度的评价,主要采用跟踪的克拉美罗界或跟踪滤波的协方差的方法,这些方法只利用雷达对于目标的测距、测角精度信息,而没有衡量测速精度对最终跟踪精度的影响。因此本文采用概率密度函数对跟踪误差进行评价,综合考虑雷达对目标的测距精度与测速精度的影响,进而更准确地反映出雷达对目标的跟踪误差。
目前针对雷达资源的管理,主要采用最优化的方法进行计算,进而分配接下来一段时间的照射功率。而对于雷达时间资源的管理,若采用最优化的方法,需要在当前时刻预测接下来较长一段时间内目标的状态,并进行时间资源的分配。若采用该方法,一方面需要预测的时间过长,增加了预测的难度与误差,另一方面,经过分配后,需要经历较长的时间来实现优化的结果,雷达无法根据实际的情况进行灵活的调整。因此本文采用马尔可夫决策的优化方法,对全部目标短期与长期的跟踪效果进行综合的评价,进而对时间资源进行实时的管理与分配。
因此,针对现有的资源管理方法的不足,本文创新地采用概率密度函数的方法对目标跟踪误差进行评价,综合考虑雷达对目标测距精度与测速的精度。接下来采用马尔可夫决策的方法,实时地对雷达的时间资源进行管理与分配。采用这种方法,一方面可以实时地调整资源分配的策略以适应随时变化的情况,另一方面兼顾考虑了此次的决策对于长期效果的影响。最终通过仿真结果表明,采用本文的马尔可夫决策过程进行资源管理,可以有效提高单波束火控相控阵雷可跟踪目标的数量。
1 目标跟踪模型
本文利用概率密度函数模型,描述雷达对目标的跟踪误差。雷达在对目标进行跟踪的过程中,会综合计算目标在前一个时刻位置的估计值、当前速度的量测与当前位置的量测,以得到雷达对当前目标位置的估计值。
1.1 跟踪模型

式中,xk表示目标在k时刻的位置的状态值;p(xk)表示该状态的后验概率。
对后验概率p(xk)进行推导,可以得到


式中,p(yk)表示雷达对目标位置进行测量,测量值为yk的概率;p()表示雷达对目标速度进行测量,测量值为y的概率;p()表示目标在k-1时刻,位置为的概率p()表示经过测量后,对目标速度进行估计的后验概率;p(xk|yk,,)表示通过当前位置的量测、速度的估计值与上一个时刻对目标位置的估计,计算得到的当前目标跟踪位置的后验状态估计值。

式(2)中的对目标位置的后验状态估计p(xk|yk,,)可以推导为

式中,p(yk|xk)表示目标位置量测的概率密度函数;p(xk|,)表示目标的状态转移函数,即已知当前速度估计值为、上一个时刻目标位置估计值为情况下,目标当前位置为xk的概率密度函数。
将式(4)代入式(2),得到

通过式(5)的描述,可以看到影响雷达对目标跟踪的精度,受到以下几个因素的影响:雷达对目标位置的量测、对目标速度的量测、目标速度的估计与上一个时刻目标的位置估计。
1.2 跟踪误差模型
根据式(5)可以看到,对目标进行跟踪后目标所在位置的概率密度函数,可以视为由位置量测概率、速度量测概率、状态转移概率等多种概率综合影响的结果。本文将在下面对于各种影响因素进行详细的描述。
雷达对目标位置测量的概率密度函数p(yk|xk)可以表示为

式中,N(yk;xk,)表示目标的位置量测yk服从以xk为均值,为方差的正态分布。方差的克拉美罗界(Cramer-Rao lower bound,C R LB)描述为

式中,CRLB(xk)表示对于目标的位置量测的CRLB;c表示光速;α表示雷达照射目标回波信噪比;表示均方带宽。
回波的信噪比α受到雷达波束持续照射目标的驻留时间τk与平均照射功率Pk影响,即αk∝τk·Pk。


式中,T表示当前时刻距离上一次雷达照射该目标的重访时间间隔;σ2表示目标在飞行过程中单位时间的状态噪声方差。目标状态转移的概率密度函数可以描述为:当前目标的位置状态xk,服从以+T为均值,(Tσ)2为方差的正态分布。
则跟踪过程中,目标n在k时刻丢失的概率Ploss(k,n)可以描述为,雷达对于目标位置的估计值与真实值差距超过门限的概率,表示为

本章节采用概率密度函数的方法,将雷达对目标的跟踪的概率密度函数与丢失概率进行了描述,为接下来的资源管理提供了评价函数。本文将对雷达照射目标的时间资源进行管理,而驻留时间的长短对于测速精度具有至关重要的影响。因此本文创新的采用概率密度函数来评价雷达对目标的跟踪性能,综合考虑了测速精度的影响。
2 资源管理模型
在第1章,本文提出了一种采用概率密度来描述目标跟踪误差的方法,并推导出了目标丢失概率的函数。接下来,本章节将以目标丢失概率作为评价函数,对雷达跟踪目标的时间资源进行管理与优化。
2.1 马尔可夫决策
在雷达视线范围内共有N个目标,则n∈[1,N]。采用fk(n,τ)表示决策函数,即在k时刻,雷达对目标n进行照射,照射该目标的驻留时间为τ。
雷达在进行决策fk(n,τ)后,即对目标n进行照射后产生的效果表示为r[fk(n,τ)],也就是目标n的丢失概率:

雷达在k时刻进行决策过后,会对剩余的时间资源与其他目标产生一定的影响。为了量化这种影响,我们假设经过当前决策之后,即k+τ时刻,对目标m再进行照射的效果表示为

采用马尔可夫决策的方法,对于雷达时间资源进行管理,一方面希望能够根据当前目标的状态进行决策,另一方面希望能够考虑到该决策产生的长期影响。
如果在当前k时刻,雷达进行了时间资源管理的决策,即对某个目标n照射了τ的时间,则直接会对目标n产生影响,导致该目标丢失概率减小为Ploss(k,n)=r[fk(n,τ)]。这一部分是进行决策后的短期影响。
当雷达对目标n照射了τ的时间之后,雷达就需要对其他目标进行跟踪,即对k+τ时刻进行决策。对于目标m在k+τ时刻进行照射的概率表示为Pk+τ(m)。Pk+τ(m)与目标m当前的丢失概率成正比,即目标m的丢失概率越大,就越有可能需要在k+τ时刻对该目标进行照射,以保证其丢失概率处于合理的范围之内。而在k+τ时刻对目标m进行了驻留时间长度为τ0的照射,则会导致该目标的丢失概率变为Ploss(k+τ,m)。该丢失概率描述了在k时刻对目标n照射了τ的时间之后,对于目标m可能产生的影响,因此称为k时刻决策产生的长期影响。综合所有目标的长期影响,可以描述为

因而将影响的函数Tk(n,τ)表示为在k时刻对目标n照射了τ的时间之后,对于所有目标的丢失概率产生的短期影响与长期影响。Tk(n,τ)可以表示为

2.2 优化方程
根据第2.1节中式(14)的描述可以看到,在k时刻进行决策后,将会对所有的目标产生一个短期与长期的影响,即对影响函数Tk(n,τ)的描述。
在优化的过程中,在每个k时刻进行决策,决定需要照射的目标n与相应的驻留时间τ。同时需要保证对当前照射的目标保持跟踪情况下,其他目标在接下来的时间内不丢失,即影响函数Tk(n,τ)最小。则优化函数可以写为

式中,Tr表示当前雷达剩余的可以用于跟踪的时间资源;约束条件s.t.τ≤Tr表示为当前用于跟踪的驻留时间不超过当前可用的时间资源。
本文提出的算法的运算复杂度较高,运算量的多少取决于目标的数量N与设置的速度状态的数量L1与位置状态的数量L2。根据式(10)与式(14)可以将算法的时间复杂度表示为O(n2·L31·L32)。然而在雷达实际的应用中,可以根据实际精度的需求改变设置的状态的数量L1与L2,以提高运算速度。
2.3 时间资源分配流程
接下来本文将详细描述在跟踪过程中,对于时间资源分配的流程。
步骤1 在k-1时刻,首先对雷达视线范围内的N个目标建立跟踪,对目标n(n∈[1,N])进行测量后,获得目标的位置的估计:^xk-1(n)。
步骤2 在当前时刻k,需要决定接下来一段时间内需要照射的目标n,以及对其照射的驻留时间τ。当前时刻剩余的用于跟踪的时间资源为Tr,则可分配的时间τ<Tr。
首先根据当前时刻对目标位置的估计,计算雷达距离目标n的径向距离Rk(n)。回波的信噪比αk(n)受到雷达波束持续照射目标的驻留时间τk(n)与平均照射功率Pk影响:

步骤3 由于已知k时刻的目标位置与信噪比,根据式(10)可以计算得到任意目标n在分配给予τ的时间长度照射后的丢失概率r[fk(n,τ)]。并且能够计算k+τ时刻后,对其他目标进行照射τ0时间的丢失概率总和

根据以上计算得到的任意目标n分配任意τ的驻留时间后的影响函数Tk(n,τ),根据全部数值求解优化函数(15),得到满足条件的需要照射的目标n以及需要照射的驻留时间长度τ。
步骤4 根据分配的结果,对雷达k到k+τ时刻的波束方向进行调整,对目标n进行驻留时间为τ的照射,当前剩余的时间资源Tr=Tr-τ。
步骤5 时刻k=k+τ,若当前时刻可以补充时间资源,则Tr=Tr+Tb,其中Tb表示经过一段时间之后,可以补充的照射时间资源。跳转至步骤2,继续对全部目标进行跟踪,并进行时间资源的分配。
本章节采用马尔可夫决策过程,对资源分配的方法进行优化。相对于传统的自适应的资源管理,采用本文的方法,一方面考虑了目标当前的情况,可以实时地进行决策;另一方面,兼顾了此刻的决策造成的长期影响。
3 仿真验证
为了验证采用马尔可夫决策的时间资源综合分配算法的有效性,本文进行了如下仿真,并将该算法的性能与传统的平均分配、自适应分配时间资源的方法进行比较。
3.1 对比验证方法
为了验证本文方法的有效性,在仿真过程中将采用两种传统的方法,对雷达时间资源进行管理,用来对跟踪后的结果进行比较。
方法1 平均分配的方法
雷达照射每个目标的重访时间间隔均为1s,根据目标的状态调整驻留时间的长短。驻留时间与雷达与目标的径向距离、目标的RCS等因素有关,可以描述为τk∝R4/RCS。
方法2 自适应分配方法
该方法在每个时刻,均对所有目标的跟踪误差σk(n)进行计算与估计,当存在某个目标的σk(n)>Thr,其中Thr表示跟踪误差的门限,则对该目标n进行照射,分配给该目标的驻留时间τk∝R4/R CS。
该方法的核心思想是根据目标的跟踪精度的需求,即时地给予一定的时间资源,以保证所有目标的跟踪误差小于门限Thr。
3.2 仿真场景
仿真场景如图1所示,在雷达的视线范围内,存在10个飞行的目标,目标的速度在400~800 km/h之间,所有目标在飞行过程中均为匀速直线运动,并存在一定的R CS起伏。因此根据对场景内的目标的运动特性,均采用卡尔曼滤波的方法,对目标进行跟踪。如果按照传统的平均分配雷达的时间资源,视线内的目标个数已经远远超过雷达的最大可跟踪目标的数量,即雷达无法对这10个目标全部进行跟踪,只能对其中5~6个目标进行跟踪。,则在整个飞行过程中,雷达照射每个目标获得的回波的平均信噪比如图2所示。

图1 仿真场景与目标轨迹

图2 场景中10个目标的平均信噪比
仿真采用的是单波束相控阵雷达,采用线性调频脉冲信号对目标进行照射。雷达同时发射一个波束照射某个位置上的目标,并且可以即时调整发射方向。雷达每1 s的时间中有15%的时间资源用以对目标进行跟踪,即150 ms。我们设定的跟踪误差的门限为10 m,即需要通过时间资源管理,保证进行跟踪的目标,跟踪的位置与真实位置间的差距不超过10 m。
3.3 仿真结果
对仿真场景中的10个目标建立跟踪,分别采用方法1、方法2与本文的方法对时间资源进行管理。由于目标数量远远大于雷达可以跟踪的目标的最大数量,故在跟踪过程中,需要根据不同的分配方法所剩余的时间,对跟踪目标进行取舍。
则采用3种方法,对场景中的目标进行跟踪,跟踪过程中全部目标的平均跟踪误差如图3~图5所示。其中图3表示采用方法1进行时间管理得到的实际跟踪误差,图4表示采用方法2进行时间管理得到的实际跟踪误差,图5表示采用方法3进行时间管理得到的实际跟踪误差。图中显示的柱状图表示对应编号的目标在整个跟踪过程中,平均的跟踪误差。若某个目标编号上不存在柱状图,表示没有对该目标进行跟踪。

图3 采用方法1每个目标平均跟踪误差

图4 采用方法2每个目标平均跟踪误差

图5 采用本文方法每个目标平均跟踪误差
通过图3可以看到,若采用方法1,即平均分配的方法管理时间资源,雷达可以跟踪6个目标,且保证每个目标的跟踪精度都处于要求的门限之下。如图4所示,若采用方法2,即自适应的方法,可以保证6个目标的有效跟踪。同时剩余出一部分的时间资源,对目标9进行跟踪,但是无法形成有效的跟踪,所以这个目标的跟踪误差远超过门限要求。若采用本文中提出的马尔可夫决策的方法,如图5所示,则可以保证对8个目标的有效跟踪。通过3种方法的比较,采用本文提到的方法,可以保证目标的跟踪误差处于门限范围内。
而在整个跟踪过程中,以图6中目标3为例,代表了诸如目标2~6、10等6个目标,可以采用方法1与方法2进行很好的跟踪。而以目标9为例,采用方法1已经无法进行跟踪,采用方法2则有一部分时间可以进行照射,而采用方法3可以进行跟踪。目标5与目标9在3种跟踪模式下的跟踪误差如图6与图7所示。

图6 分别采用3种方法情况下目标5的跟踪误差
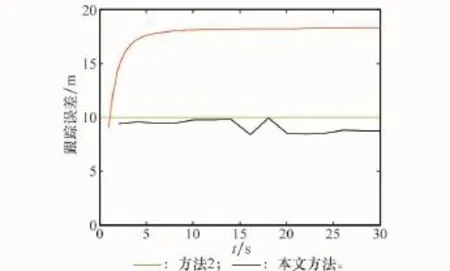
图7 分别采用3种方法情况下目标7的跟踪误差
通过图7可以看到,以目标5为例的目标2~6、10等6个目标,由于距离雷达较近,较容易进行跟踪。因此在整个跟踪过程中,不论采用3种方法中的任意一个,跟踪误差均处于设定的门限之下。而通过图7可以看到,对目标7的跟踪,由于时间资源的不足,采用方法1完全无法跟踪,被完全舍弃;采用方法2,由于时间资源的不足,虽然可以分配一定的时间资源进行照射与跟踪,但是跟踪误差超过了门限设定的要求,无法满足跟踪的要求;而采用本文中的马尔可夫决策的方法,可以对该目标进行跟踪,并保证部分时刻的跟踪精度处于要求的范围内。
通过以上的仿真可以看到,当雷达的视野范围内出现了较多数量的目标,目标的数量超过了雷达最大可以进行跟踪的能力,采用传统的时间资源管理的方法已经无法满足需求。因此采用本文的马尔可夫决策的方法对单波束火控相控阵雷达用于跟踪的时间资源继续管理,可以有效地节约一部分时间资源,以跟踪更多的目标,提高雷达跟踪性能。同时保证增加的目标跟踪误差处于设定的门限范围内。
4 结 论
本文针对单波束火控相控阵雷达的应用,提出了一种基于马尔可夫决策的时间资源管理算法,目的是针对雷达有限的时间资源,进行合理的管理,进而尽可能地节约时间资源,对更多的目标进行跟踪。
由于传统的评价雷达对目标跟踪误差描述的函数,无法衡量速度量测的影响,而驻留时间的长度对于测速精度有着巨大的影响。因此本文创新地采用概率密度函数的方法,综合测速精度与测距精度的影响,以目标的丢失概率作为跟踪误差的评价函数。
在进行资源管理的过程中,考虑到预测的难度与资源分配的实时性,采用马尔可夫决策的方法进行资源管理的计算。实时的决策标准既兼顾了当前的目标状态,同时考虑到了进行分配后对于整体状态的长期影响。
本文所采用的马尔可夫决策的方法对雷达时间资源进行管理,适用于单波束火控相控阵雷达,即雷达可以实时、快速改变单个波束发射方向。而该算法适用于雷达场景中的目标数量较多,超过了雷达最大的可跟踪目标的数量的情况。可以通过本文的方法,对时间资源进行管理与调整,以提高可以跟踪的目标个数。
通过仿真实验表明,相对于平均分配时间资源与传统的自适应的分配方法,本文的方法能够有效地节约时间资源,并对节省下来的时间资源合理利用,对更多的目标进行跟踪。对于单波束相控阵雷达,跟踪目标的数量可以提高30%,在保证资源不变情况下,有效提高性能。提高最大可跟踪的目标数量,对于火控相控阵雷达,这种经常需要大量目标数量的雷达,具有重要的意义。
[1]Narykov A S,Oleg A K.Algorith m for resource management of multiple phased array radars for target tracking[C]∥Proc.of the 16th International Conference on Inform ation Fusion Istanbul,2013:1258-1264.
[2]Yan J K,Jiu B,Liu HW,et al.Joint cluster and power allocation algorith m for m ultiple targets tracking in m ultistatic radar systems[J].Journal of Electronics&Inform ation Technology,2013,35(8):1875-1881.(严俊坤,纠博,刘宏伟,等.一种针对多目标跟踪的多基雷达系统聚类与功率联合分配算法[J].电子与信息学报,2013,35(8):1875-1881.)
[3]Yan J K,Xia S Z,Dai F Z,et al.Power allocation strategy for target tracking in asynchronous m ultistatic radar systems[J]. Journal of Xidian University,2013,46(6):32-40.(严俊坤,夏双至,戴奉周,等.异步多基地雷达系统目标跟踪的功率分配算法[J].西安电子科技大学学报,2013,46(6):32-40.)
[4]Zhao J X,Seok J W.A greedy policy for fleet-level radar resource management[C]∥Proc.of the52nd IE E E Conference on Decision and Control,2013:3160-3165.
[5]Narykov A S,Krasnov O A.Effectiveness-based radar resource management for target tracking[C]∥Proc.of the International Radar Conference,2014:1-5.
[6]Seok J,Zhao J X.Radar resource management:dyna mic program ming and dyna mic finite state machines[C]∥Proc.of the European Control Conference,2013:4100-4105.
[7]Jin woo S,Zhao J X.Radar resource management:dyna mic program ming and dyna mic finite state machines[C]∥Proc.of the European Control Conference,2013:4100-4105.
[8]Chen Y J,Luo Y,Zhang Q,et al.Adaptive schedul ing algorith m for phased array radar based on cognitive ISA R imaging[J].Journal of Electronics&Information Technology,2014,36(7):1566-1572.(陈怡君,罗迎,张群,等.基于认知ISAR成像的相控阵雷达资源自适应调度算法[J].电子与信息学报,2014,36(7):1566-1572.)
[9]Zhang Z K,W ang F,Zhou J J,et al.A daptive time resource scheduling for m ultiple target tracking[J].Acta Aeronautica et Astronautica Sinica,2011,32(3):522-530.(张贞凯,汪飞,周建江,等.多目标跟踪中自适应时间资源调度[J].航空学报,2011,32(3):522-530.)
[10]M atthiesen D J.Efficient bea m scanning,energy allocation,and time allocation for search and detection[J].Phased Array Systems and Technology,2010:361-368.
[11]M oham mad R,Bi l l M.Constrained multi-object Markov decision schedul ing with appl ication to radar resource management[C]∥Proc.of the13th Information Fusion,2010:1-8.
[12]Vikra m K,Djonin D V.Optimalthreshold policies for m ultivariate P O M D Ps in radar resource management[J].IE E E Trans.on Signal Processing,2009,57(10):3954-3969.
[13]Fotios K,Driessen H.Radar resource management for improved situational awareness[C]∥Proc.of the International Radar Conference,2014:1-6.
[14]Chen M Y,W ang L.Resource management algorith m based on the minim u m covariance mean deviation criterion for phased array radars[C]∥Proc.of the Microwave and Millimeter W ave Circuits and System Technology,2012:1-2.
[15]Li W L,Yuan S.Efficient anchor power allocation forlocationaware networks[C]∥Proc.of the IE E E International Conference,2011:1-6.
Time resource management algorithm for the fire control phased-array radar
QIN Tong,D AI Feng-zhou,LIU Hong-wei,F A N G Ming
(National Laboratory of Radar Signal Processing,Xidian University,Xi’an 710071,China)
For fire control phased array radar,itis flexible to adjust the direction of the beam,so as to adjust the time resource of radar for tracking.Aiming at this characteristic,a kind of time resource management algorith mis proposed,which is used to enhance the maxim umnumber of radar tracking targets.The tracking precision of the targetis described with the probability density function,and the influence of ranging and velocity precision ofthe measurement on the tracking erroris considered.The method of Markov’s decision is used to allocate the dwell time and revisit time interval for each target.The simulation results show that,co m pared with the traditional methods of resource management,the proposed method can increase the maxim u m nu m ber of the target and the radar can track with the same tracking accuracy.
fire control phased-array radar;time resource management;Markov decision
TN953
A
10.3969/j.issn.1001-506 X.2016.03.11
1001-506 X(2016)03-0545-06
2015-04-20;
2015-09-15;网络优先出版日期:2015-12-24。
网络优先出版地址:http:∥w w w.cnki.net/kcms/detail/11.2422.T N.20151224.1018.004.html
国家自然科学基金(61271291,61201285);新世纪优秀人才支持计划(N C E T-09-0630);全国优秀博士学位论文作者专项资金(F A N E D D-201156);国防预研基金;中央高校基本科研业务费专项资金资助课题
秦 童(1988-),男,博士研究生,主要研究方向为认知雷达、雷达资源管理。
E-mail:qin13@yeah.net
戴奉周(1978-),男,副教授,博士,主要研究方向为统计与自适应信号处理、信号检测。
E-mail:fzdai@xidian.edu.cn
刘宏伟(1971-),男,教授,博士研究生导师,主要研究方向为雷达系统、雷达信号处理、雷达自动目标识别。
E-mail:h wliu@xidian.edu.cn
方 明(1987-),男,教授,博士研究生,主要认知雷达、空时自适应处理、目标检测。
E-mail:zj02065119@163.com
