沉垫自升式平台就位过程运动响应频域与时域分析
2016-09-15张兆德王玉红
张兆德,王玉红,陈 伟
(1. 浙江海洋学院船舶与海洋工程学院,浙江 舟山 316022;2. 浙江省近海海洋工程技术重点实验室,浙江 舟山 316022;3. 沃利帕森工程集团有限公司,美国 华盛顿州 西雅图)
沉垫自升式平台就位过程运动响应频域与时域分析
张兆德1,2,王玉红1,2,陈 伟3
(1. 浙江海洋学院船舶与海洋工程学院,浙江 舟山 316022;2. 浙江省近海海洋工程技术重点实验室,浙江 舟山 316022;3. 沃利帕森工程集团有限公司,美国 华盛顿州 西雅图)
针对沉垫自升式平台在下放过程中四角系有锚链且处于漂浮状态,在风、浪、流的作用下会产生六个自由度的运动响应,若响应过大,会影响平台的正常安装甚至危及平台安全。采用三维势流理论和Morison公式,运用大型水动力计算分析软件 SESAM,分别在频域和时域范围内对平台就位过程的运动响应进行了分析,并通过锚链的张力时历曲线对锚链的强度进行校核。结果表明,波浪的入射角和周期对平台运动有很大的影响,且纵摇和横摇对波浪的入射方向更加敏感,时域范围内考虑平台和锚链耦合作用影响下平台的运动响应和频域范围内短期预报的最大值相差不多,平台在此工况下具有良好的运动性能,在频域和时域范围内平台的运动均满足施工要求,锚链受到的张力符合强度要求。
沉垫平台;频域;时域;动力响应;三维势流理论;锚链张力
0 引 言
随着海洋石油工业的不断向深蓝海域发展,各类海洋工程装备也蓬勃崛起,相对于其他钻井船,自升式钻井平台由于其造价相对低廉、容易部署操作和能够重复使用,近年来发展迅速。自升式钻井平台的主要形式有插桩型、箱型和沉垫型。沉垫自升式平台具有海上储油功能,减少了平台上部载荷,而且沉垫对桩腿和主体平台起到支撑作用,避免了桩腿直接插入海底可能引起的桩靴穿刺现象。我国现有的沉垫型自升式平台作业多在浅水区域[1],本文研究的沉垫平台工作水深接近 100m,属于中深水区域,无论其在拖航还是就位过程中受到的波浪载荷和浅水区域中的工况差异很大。
沉垫平台需要到新站点作业时,具体为以下几个过程:① 桩腿拔桩,等沉垫升至主体下方最高位置时,用拖轮拖至作业点;② 到达作业点后,缓慢下放沉垫至海底,然后提升主船体到一定位置;③ 对平台进行预压,使沉垫下面底质密实,保证其坐底稳性。平台在下放过程中处于漂浮状态,在风、浪、流的作用下会产生6个自由度的运动,并且在安装过程中,平台的重心,浮心,转动惯量等参数都处于变化中,如果平台运动幅度过大,将危及平台的安全,甚至有倾覆的可能,因此对其就位过程运动响应进行正确的模拟,在设计过程中是非常重要的步骤。
很多学者在不同情况下对自升式平台进行了水动力响应分析。Jensen 和 Capul[2]研究了二阶随机波浪下自升式平台的极限响应,Cassidy等[3]预报了自升式平台长期预报极限响应的统计值,Martin 等[4]研究了自升式平台的非线性动力响应,何堃、唐友刚[5]对自升式钻井平台就位过程进行了桩腿的触底分析,樊敦秋[6]研究了沉垫自升式平台的关键技术。但对沉垫自升式平台就位过程运动响应的时域分析及系缆动力响应少有研究,本文开展了相关问题的初步研究工作。
选取沉垫自升式平台下放过程中沉垫和主体相距1m时,基于三维势流理论和Morison公式,应用SESAM软件对其在设计允许的最大海况下的垂向运动响应(垂荡、横摇、纵摇)进行分析。频域范围内得到平台短期预报的响应百一值,时域范围内得到平台各个方向的运动时历曲线图。同时对锚链的张力进行强度校核。
1 数值模拟
1.1结构参数及环境工况
以一座沉垫型自升式钻井平台为研究对象(见图1),其主要结构包括主船体(长76m,型宽54m,型深6.5m),储油沉垫(长76m,型宽52m,型深8.5m)和4根三角桁架式桩腿。在平台安装过程中,沉垫缓慢下沉,主体漂浮在水面,并在其上甲板的角隅处布有导揽孔连接锚链,锚链布置在四角处,与X轴水平成30°,Z轴垂下成50°,其锚链布置方式和坐标系见图2,锚链的主要参数见表1。

图1 平台侧视
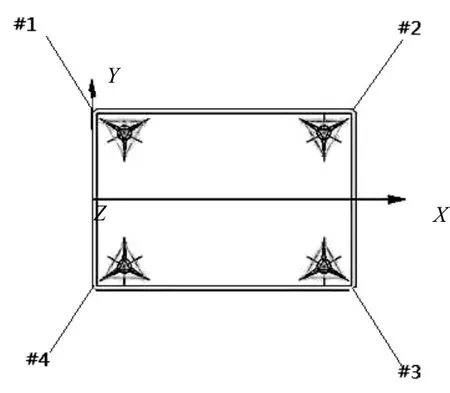
图2 锚链布置方式和参考坐标系

表1 锚链参数
表2为沉垫和主船体相距1m时平台在参考坐标系下的主要参数。随着沉垫的不断下降,这些参数也将发生变化。表3为设计海况下的环境条件。

表2 平台主要参数 单位:m
1.2计算理论
在频域和时域范围内分别对上述工况进行计算。基于三维势流理论和Morison公式,在频域范围内可得到不同波浪频率和方向下平台的附加质量、阻尼系数、船体运动响应传递函数等水动力参数。频域内的船体运动方程为:

式中:ω——角频率;β——波浪入射角;M——质量矩阵;A(ω)——附加质量矩阵;B(ω)p——势流阻尼矩阵; Bv——线性粘性阻尼矩阵;C和Ce——静水恢复力矩阵和外部恢复力矩阵;X(ω,β)——船体6自由度位移矢量;F(ω,β)——波浪激励力矢量[7]。根据求解方程得到的运动幅值响应算子结合波浪谱,基于瑞利分布可对平台的运动响应进行短期预报。
时域计算分析采用快速傅里叶变换(FFT)和卡明斯脉冲理论进行时域分析,其运动方程为:

1.3建立模型
面元法基于势流理论,假设流体振荡和物体摇荡的幅度与物体的横截面积尺度比为小量,忽略流体分离影响,是分析大型结构物在规则波中线性稳态响应的一种常用方法[10]。对于沉垫自升式钻井平台,需要建立主船体和沉垫的湿表面模型(见图3),基于莫里森公式的莫里森模型(见图4),图5为平台的整体水动力模型。本文使用SESAM的HydroD模块进行频域范围内分析,并求得水动力参数,时域非线性耦合分析使用DeepC模块进行求解,通过频域得到的水动力参数产生延时函数,并将一阶、二阶波浪力转换到时域范围内,建立平台系缆模型,求解方程得到平台运动的时历曲线。
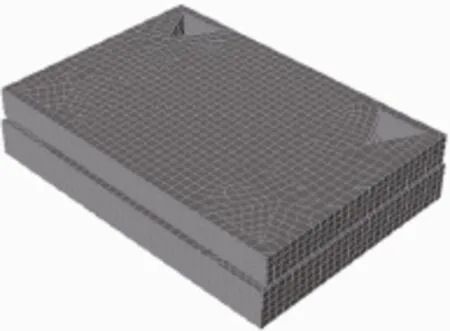
图3 湿表面模型

图4 莫里森模型
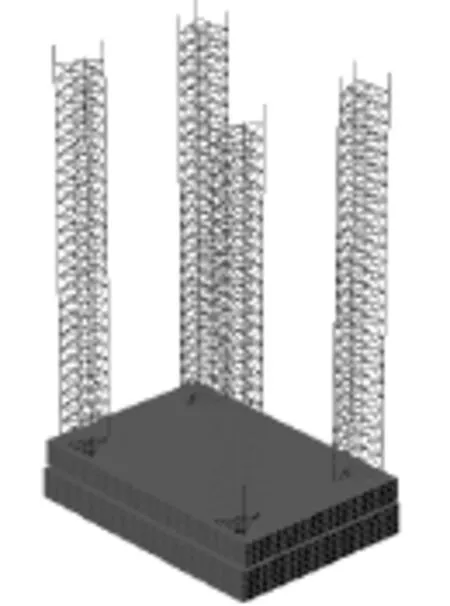
图5 平台水动力模型
2 计算结果及分析
2.1频域范围内计算结果
取平台就位过程中沉垫与主体相距1m的工况进行分析研究。其他位置分析方法与此相同。在频域分析过程中,取波浪的周期范围为2.5~25s,间隔为1.5s,峰值附近加密至0.5s。由于平台具有很好的对称性,波浪的入射角取0~90°,间隔15°,对每个波浪频率方向组合进行平台运动响应的分析。图6~8为平台垂向运动(垂荡、横摇、纵摇)的RAO(幅值响应算子)曲线。图9~11为3个方向运动传递函数结合波浪谱得到的运动响应谱。

图6 垂荡RAO

图7 横摇RAO
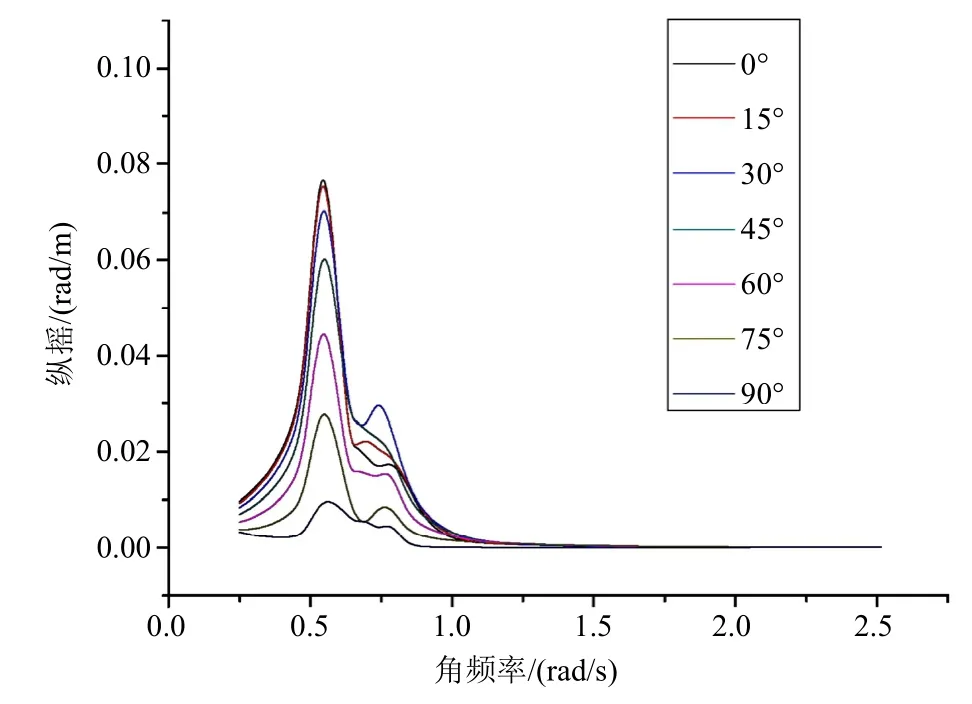
图8 纵摇RAO
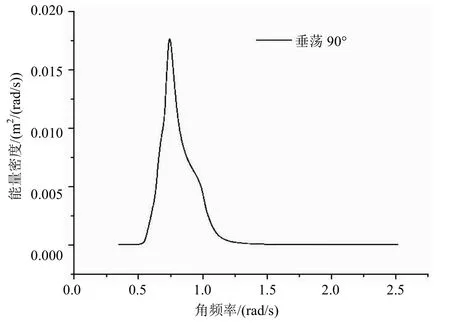
图9 90°波浪入射角垂荡响应谱

图10 90°波浪入射角横摇响应谱

图11 0°波浪入射角纵摇响应谱
通过对图6~8结果的分析可知,波浪的入射角和周期对3个方向的运动响应都产生非常大的影响,相对于垂荡,横摇和纵摇对波浪的入射方向更加敏感。垂荡和横摇在入射角为 90°时达到最大值,纵摇在入射角0°时达到最大值。3个方向的运动幅值均在波浪周期接近11.6s时达到最大,然后迅速减小,当波浪频率>1rad/s时,幅值接近于0,通过以上分析可以得出平台此种情况下的固有周期≈11.6s,远大于安装时所处海域的波浪周期,平台不会发生大幅度运动,具有良好的性能。图 9~11是选取最大运动响应传递函数(垂荡、横摇对应波浪入射角90°,纵摇0°)与波浪谱结合得到的运动响应谱,根据瑞利分布得到其短期预报的百一值[11](见表4)。

表4 垂荡、横摇、纵摇短期预报的百一值
通过对图9~11结果的分析,可以得出垂荡的主要波频成分为0.71rad/s,横摇和纵摇的主要波频成分为0.78rad/s。短期预报平台3个方向的最大运动幅值均在施工允许的范围内,能够正常施工。
2.2时域计算结果分析
通过频域计算得到平台的附加质量、阻尼系数等水动力参数后,可在时域范围内对平台的运动结果进行分析。通过静力计算,整个系统会达到一个动态平衡位置,然后以该位置为平衡中心运动。图 12、13为在风浪90°时的垂荡和横摇运动曲线。图14为在风浪均为0°时的纵摇曲线。图15为最大的锚链张力曲线图。并且根据时历曲线图得到如表5所示平台和锚链的响应统计值。本文时域计算所取模拟时间为3h。

图12 风浪90°垂荡时历曲线

图13 风浪90°横摇时历曲线

图14 风浪0°纵摇时历曲线

图15 #1锚链张力时间历程

表5 平台运动和锚链响应统计值
通过对时域内运动时历曲线得到的分析,对于垂荡和和纵摇其动态平衡位置偏移量大致为零,而横摇的动态平衡位置大偏移量接近0.5,考虑平台和锚链的耦合运动影响之后,通过表5对平台运动的响应统计值可以得出,垂荡、横摇和纵摇的最大平均值约为0.35、1.75和1.47,与频域范围内短期预报的最大值相差分别为 9%、4%和 5%,由此可知,频域和时域范围内对平台在此工况下运动响应的预报非常接近,因为垂荡、横摇和纵摇运动的能量集中在波频成分,低频部分对他们的影响很小。
图15为4根锚链中所受锚链张力最大的#1张力时历曲线图,从图15可知,锚链的最大张力≈1050kN,小于破断张力,锚链安全系数>2.0,锚链强度满足要求。
3 结 语
针对沉垫自升式储油平台下放过程处于漂浮状态时的动力响应在频域和时域范围内进行了研究,得出如下结论:
1) 波浪的入射角和周期对平台运动产生非常大的影响,且纵摇和横摇对波浪的入射方向更加敏感;入射角为90°时垂荡和横摇达到最大值,纵摇在入射角0°时达到最大值。平台在该工况下的固有周期≈11.6s,远大于安装时所处海域的波浪周期;
2) 时域范围内考虑平台和锚链耦合作用影响下平台的运动响应和频域范围内短期预报的最大值相差不多,平台在此工况下具有良好的运动性能。锚链所受的最大张力小于破断张力,安全系数>2.0;
3) 通过对主体与沉垫相距1m时的运动响应进行分析,可以对其之后的运动响应作出预测。随着沉垫与主体距离不断增加,沉垫所受到的波浪载荷不断减小,平台重心下降,惯性矩以及附加质量增加,平台的运动会越来越小,直至沉垫安全接触海底安装成功。
本文进一步认识了沉垫平台就位过程的运动响应特性,为沉垫平台的设计与研究提供参考和依据。
[1] 李嘉文,杨树耕,等. 九十米水深储油自升式平台的沉垫设计[J]. 船舶工程,2012, 34.
[2] Jensen, J.J., Capul, J.L.. Extreme response predictions for jack-up units in second order stochastic waves by FORM[J]. Probabilistic Engineering Mechanics. 2006, 21 (4): 330-337.
[3] Cassidy, M.J., Taylor, P.H., Taylor R. E. Evaluation of long-term extreme response statistics of jack-up platforms[J]. Ocean Engineering, 2002, 129: 1603-1631.
[4] Martin, S.W., Thompson, R.S.G., Guy T.H.. Non-linear dynamic analysis of offshore jack-up units[J]. Computers and Structure,1998, 169: 171-180.
[5] 何 堃,唐友刚,等. 自升式钻井平台就位过程桩腿触底分析[J]. 中国海洋平台,2012, 27 (2).
[6] 樊敦秋. 沉垫储油自升式平台的几个关键技术研究[D]. 青岛:中国海洋大学,2014.
[7] DNV, SESAM User Manual ,Wadam Version 8.3, December 14, 2011.
[8] 朱 建,窦培林,等. 西非海域涌浪对多点系泊FPSO水动力性能影响分析[J]. 中国造船,2014, 55 (3).
[9] 许 鑫,杨建明,等. 深水半潜式起重船耐波性研究[A]. 第十五届中国海洋工程学术讨论会论文集[C]. 219-225.
[10] 戴遗山,段文洋. 船舶在波浪中运动的势流理论[M]. 北京:国防工业出版社,2008.
[11] 莫瑞芳,刘亚东. 15000t半潜船耐波性分析和短期预报[J]. 船舶工程,2011, 2.
Frequency-domain and Time-domain Motion Response Analysis of Mat-supported Jack-up Platform Positioning Process
ZHANG Zhao-de1,2, WANG Yu-hong1,2, CHEN Wei3
(1. School of ship and ocean engineering, Zhejiang Ocean University, Zhoushan Zhejiang, 316022;2. Key Laboratory of Offshore Engineering Technology of Zhejiang Province, Zhoushan Zhejiang, 316022, China;3. WorleyParsons Group, Seattle WA, USA)
Considering the fact that the 4-leg anchor chains are floating during the mat-supported jack-up platform positioning process, the influence of wind, wave and current may induce 6 DOF motion responses of the platform. If the responses are too large, the normal platform installation will be disturbed, even its safety would be hazarded. Based on 3D potential theory and Morison equation, the platform motion responses during positioning process are analyzed respectively in the frequency domain and time domain using SESAM, a powerful hydrodynamic calculation analysis software. The anchor line strength is also checked based on the line tension time history curve. The result shows that the wave incoming direction and period have large influence on the platform motion, and the pitch and roll motions are more sensitive to the wave incoming direction; the platform motion response in time-domain considering the interaction between platform and anchor lines is close to the maximum value of short term prediction in the frequency domain; the platform has excellent motion performance under this condition, the frequency-domain and time-domain results can both meet the operation requirements, and the tension in the anchor lines can meet the strength requirement.
mat-supported platform; frequency-domain; time-domain; dynamic response; 3D potential theory; anchor line tension
U674.38+1
A
2095-4069 (2016) 01-0001-06
10.14056/j.cnki.naoe.2016.01.001
2015-05-04
国家自然科学基金(51179173,51379189)。
张兆德,男,博士,教授,1964年生。研究方向:船舶与海洋工程结构动力分析。