车辆电动静液压作动器的半主动悬架时滞补偿控制
2016-09-13寇发荣范养强张传伟杜嘉峰
寇发荣 范养强 张传伟 杜嘉峰 王 哲
西安科技大学,西安,710054
车辆电动静液压作动器的半主动悬架时滞补偿控制
寇发荣范养强张传伟杜嘉峰王哲
西安科技大学,西安,710054
为了改善车辆行驶的平顺性和操纵稳定性,设计了一种基于电动静液压作动器(EHA)的车辆半主动悬架结构。进行了EHA作动器的性能试验分析,建立了EHA半主动悬架的键合图模型,计算了EHA半主动悬架系统的临界时滞,分析了时滞对EHA半主动悬架幅频特性和减振性能的影响,设计了Smith预估时滞补偿控制器,进行了EHA模糊控制半主动悬架的时滞补偿仿真分析。结果表明,EHA半主动悬架具有较好的阻尼可控性;然而随着时滞的增大,悬架系统会出现“轮跳”现象;在Smith时滞预估补偿控制下,EHA半主动悬架的簧载质量加速度减小约30%,轮胎动载荷减小约20%。
电动静液压作动器;半主动悬架;模糊控制;预估时滞补偿
0 引言
可控悬架已成为车辆悬架技术发展的方向。根据工作机理及调节对象的不同,可控悬架又可分为半主动悬架和主动悬架。半主动悬架介于被动悬架和主动悬架之间,具有与主动悬架较为接近的控制效果[1-2]。然而,时滞问题一直是影响可控悬架动态性能的主要因素之一,包括以下几个方面:①传感器采集信号过程的时滞;②信号由传感器传送到控制器的时滞;③控制器计算的时滞;④控制信号由控制器传送到作动器的时滞;⑤作动器建立控制作用的时滞;⑥作动器动作的时滞。时滞不仅会影响悬架系统的性能,而且可能导致严重的“轮跳”现象致使悬架系统失稳,从而严重影响车辆安全性。
国内外学者先后开展了对可控悬架时滞稳定性问题的研究[3-5]。文献[6-7]针对基于可调阻尼减振器的半主动悬架设计了时滞补偿控制器,以解决半主动悬架控制中的“不合拍”问题;文献[8]提出了一种综合考虑系统输入时滞和控制器摄动的输出反馈控制器的设计方法,使悬架仍然能保证自身的性能。
本文提出了基于电动静液压作动器(electro-hydrostatic actuator,EHA)的车辆半主动悬架结构[9],并开展其力学特性试验,考虑EHA半主动悬架控制时滞,计算EHA半主动悬架系统的临界时滞,分析时滞对EHA半主动悬架幅频特性和减振效果的影响,采取Smith 预估补偿策略对EHA半主动悬架进行模糊时滞补偿控制。
1 EHA半主动悬架结构
1.1EHA半主动悬架的工作原理
EHA半主动悬架的基本结构如图1所示。该半主动悬架主要由EHA作动器和弹簧组成,其中,EHA作动器由无刷直流电机(发电机)、液压泵(液压马达)、液压缸及控制器、传感器、驱动电路、蓄能电路、蓄能电源等构成。
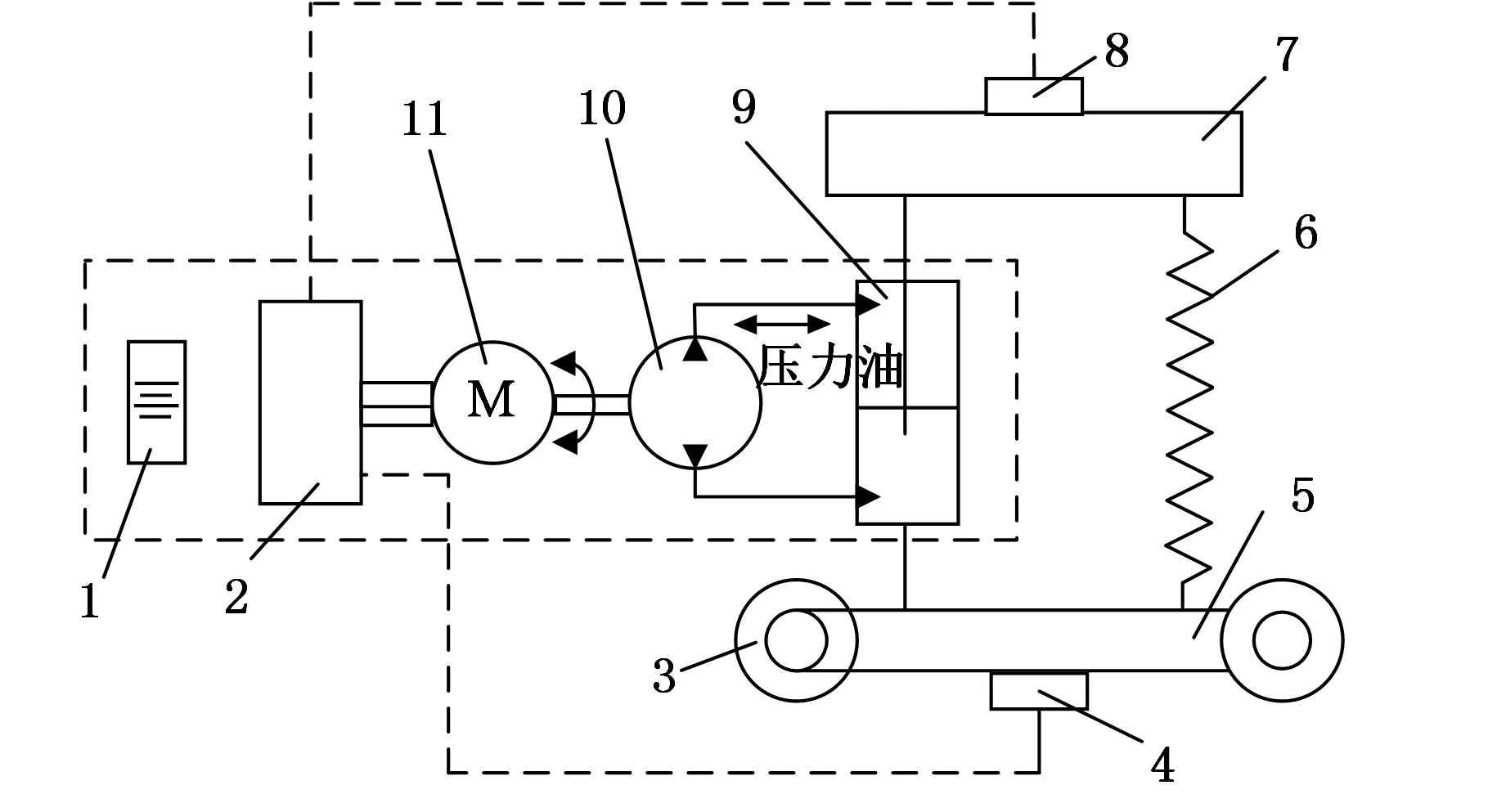
1.电源 2.控制器 3.车轮 4,8.传感器 5.车桥6.弹簧 7.车身 9.液压缸 10.液压泵 11.无刷电机 图1 EHA半主动悬架结构
当切断电源供电或电源电量不足时,在车身振动作用下液压缸随动工作,液压泵作为液压马达工作,直流电机作为发电机工作,把振动的能量转化为电能,存储在蓄电电容或电池中,同时可通过控制电磁阻力,产生再生制动力矩,实现悬架的半主动控制。如果接通蓄能电源供电,通过控制直流电机的转向和转速,进而使液压泵的转速和转向也得到控制,从而调节液压缸的阻尼力,也可以实现主动控制功能。
1.2EHA作动器的力学特性
为了验证EHA半主动悬架作动器的可行性及力学特性,试制了EHA作动器原理样机,并按照国家标准QC/T545-1999《汽车筒式减振器台架试验方法》,进行了半主动悬架作动器的力学特性试验,如图2所示。

图2 EHA半主动悬架作动器试验
将振动台激励设置为正弦输入:激振频率为1 Hz,振幅为15 mm。为了实现EHA作动器的可控阻尼力,通过分别为直流电机串联0.5、0.65、0.75、0.85电阻以及断开电路,起到改变作动器阻尼力的作用。图3和图4所示分别为EHA作动器的示功图特性和速度特性曲线。
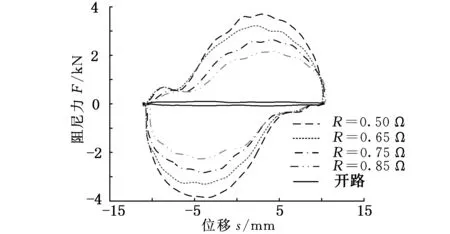
图3 阻尼力-位移曲线
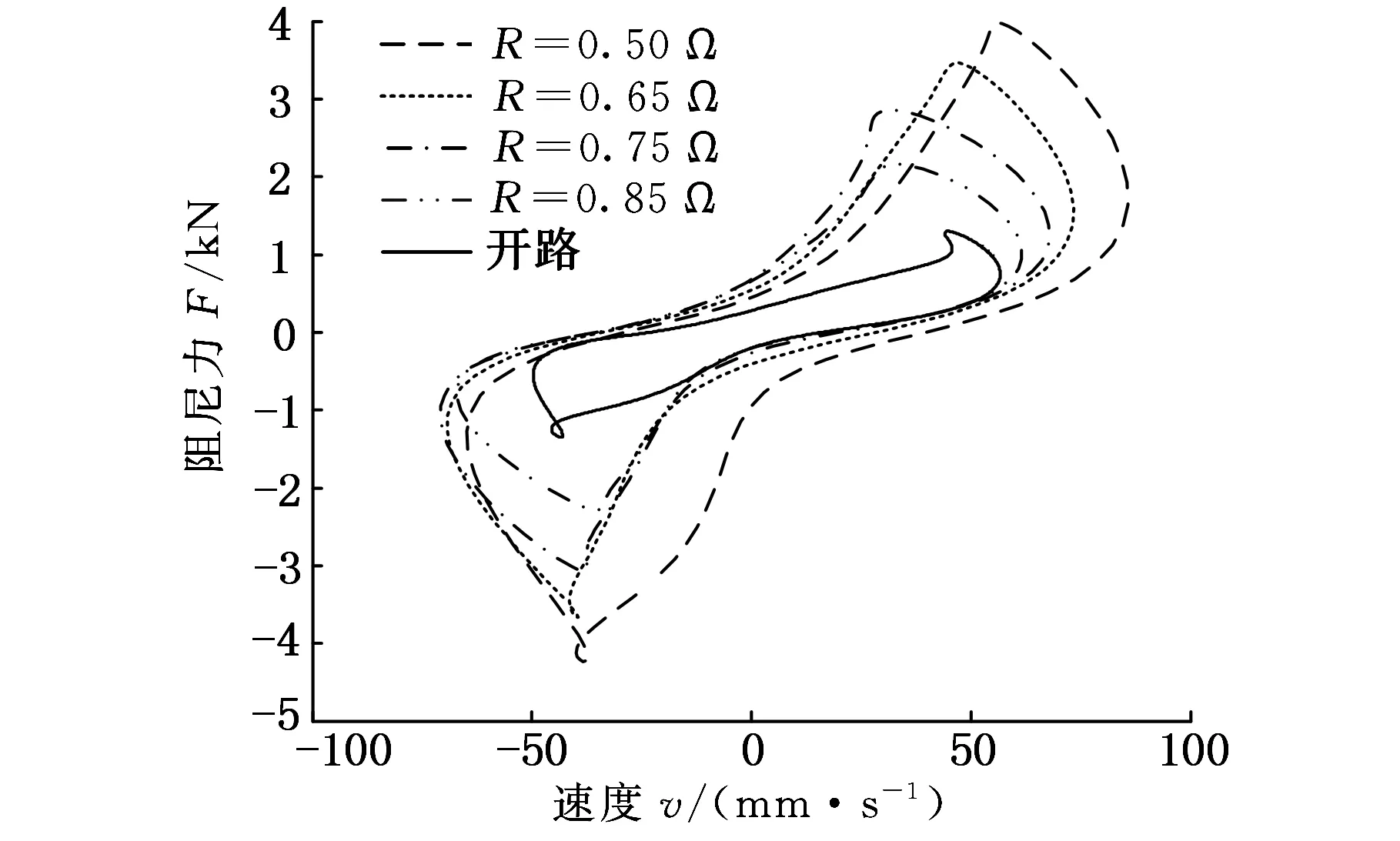
图4 阻尼力-速度曲线
从图3和图4中可以看出,当直流电机串接电阻R为0.5时,其阻尼力可达4 kN。随着直流电机外接电阻值的增大,EHA作动器的阻尼力变小,主要是因为随着外接电阻值增大,直流电机的电流变小,由于直流电机的扭矩与电流成正比,故阻尼力变小。当电路为开路时,电机不再起作用,此时作动器中仅有黏滞阻尼力发挥作用。
由EHA作动器力学特性试验分析可以看出,通过改变外接负载阻值可以改变作动器阻尼力,因此,EHA作动器具有良好的阻尼可调特性,从而保证了EHA半主动悬架功能实现的可行性。
2 含时滞的EHA半主动悬架模型的建立
2.1含时滞的EHA半主动悬架力学模型
根据图1所示的半主动悬架基本结构,建立1/4汽车二自由度半主动悬架力学模型,如图5所示。

图5 二自由度主动悬架系统模型
悬架作动器的阻尼力u由黏滞阻尼力Fs和可控阻尼力Fr组成。本文主要考虑可控阻尼力产生的时滞作用。设系统黏滞阻尼系数为cs,可控阻尼系数为cr,系统时滞为τ,则有
(1)
(2)
(3)
按照牛顿运动定理,得出含时滞的半主动悬架动力学方程:
(4)
式中,ms为簧载质量;mu为非簧载质量;kt为轮胎刚度;ks为悬架刚度;z为路面激励;x1为非簧载质量位移;x2为簧载质量位移。
2.2EHA半主动悬架系统键合图模型的建立
EHA半主动悬架是包含直流电机、液压系统、机械结构的复杂机电液一体化系统。如果采用传统的建模方法,建模难度大,准确性低。本文利用键合图进行建模,将机电部分和液压部分的复杂物理关系统一用势、流等变量来表示,同时按照能量单元之间的实际存在关系用一组相当少的物理元件相互连接,最终组成系统动态综合模型。
按照键合图的建模方法分别建立直流电机、液压泵、液压缸等键合图模型,最终得到EHA作动器键合图模型[10]。在建立半主动悬架系统键合图模型的基础上,将EHA作动器和悬架系统的键合图模型进行耦合,最终得到EHA半主动悬架系统的键合图模型。按照键合图的求解方法,进一步得到EHA半主动悬架的方框图,然后根据系统方框图在MATLAB中建立系统仿真模型。
3 EHA半主动悬架统临界时滞计算
临界时滞是时滞系统由渐进稳定状态转变为不稳定状态的临界点,是表征时滞系统保持稳定状态时所能够允许的最长迟滞时间。按照含时滞的线性常微分方程理论,半主动悬架系统的微分方程(式(4))解的形式如下:
xi(t)=Xieλt
(5)
式中,Xi为xi经过拉氏变换的变量,i=1,2。
将式(5)代入式(4),并根据微分方程非零解的存在条件得到特征方程:
(6)
半主动悬架系统渐进稳定的充分必要条件是式(6)所有的根都有负实部。系统失稳的临界条件是式(6)有纯虚根λ=iω,系统失稳后将以ω为基频做自激振动。为了计算系统失稳的临界条件,将λ=iω代入式(6),分离实部和虚部得到方程有纯虚根的条件[11]:
(7)
如果式(7)没有实根,则EHA半主动悬架系统在任何时滞条件下都处于稳定状态。计算可得系统的临界时滞计算公式:
(8)
当EHA半主动悬架参数一定时,根据式(8)可以得到可调阻尼cr与临界时滞τ的关系,如图6所示。可以看出:当基值阻尼cs一定时,临界时滞τ随可控阻尼cr的增大而减小;当可控阻尼cr足够小时,系统进入全时滞稳定状态。

图6 可控阻尼与临界时滞关系
图7所示为当系统基值阻尼变化时基值阻尼cs与可调阻尼cr之间的对应关系,同时,图7还给出了基值阻尼与可控阻尼对系统全时滞稳定区域的影响。由图7可以看出:当基值阻尼cs大于可控阻尼cr时,悬架系统进入全时滞稳定状态。

图7 (cs,cr)平面内全时滞稳定区域
图8所示为临界时滞、可控阻尼和基值阻尼三者之间的关系。
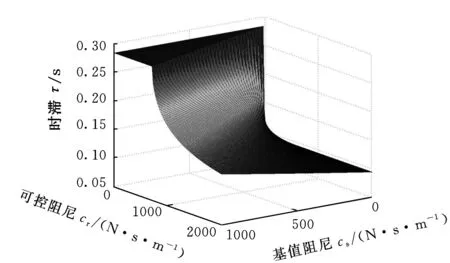
图8 基值阻尼、可控阻尼与临界时滞关系
4 EHA半主动悬架的时滞补偿控制器设计
4.1EHA半主动悬架模糊控制器
模糊控制是目前工业领域内应用较为广泛的一种控制策略,具有很好的鲁棒性和非线性系统适应性。模糊控制系统的核心是模糊控制器。图9为模糊控制系统的结构图。
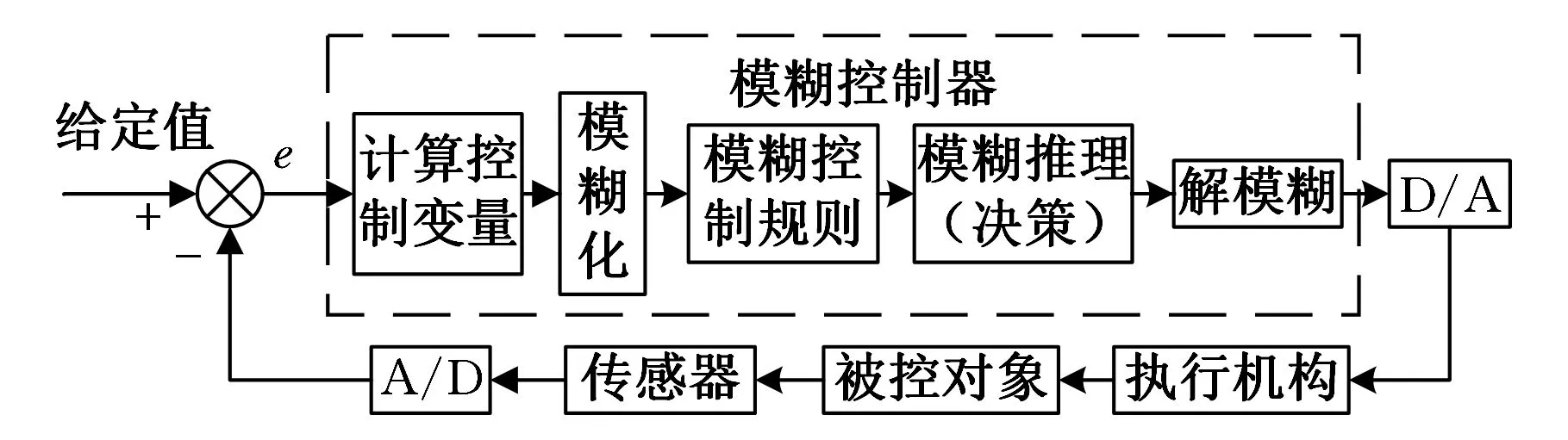
图9 模糊控制器结构
由于EHA半主动悬架是通过控制直流电机的转速来实现对液压缸控制的,故本文选择模糊控制输出量为占空比α,输入量为簧载质量的位移偏差e及其变化率ec,同时选择7个模糊集合对输入和输出状态进行描述,即正大(PB)、正中(PM)、正小(PS)、零(ZE)、负小(NS) 、负中(NM)和负大(NB),设输入量的论域均为[-6,6],输出变量U的论域为[-6,6],同时在满足控制精度的前提下选择三角形隶属度函数。在MATLAB软件中设计EHA半主动悬架系统模糊控制器,同时得到输入量e、ec以及输出量u之间的关系,如图10所示。
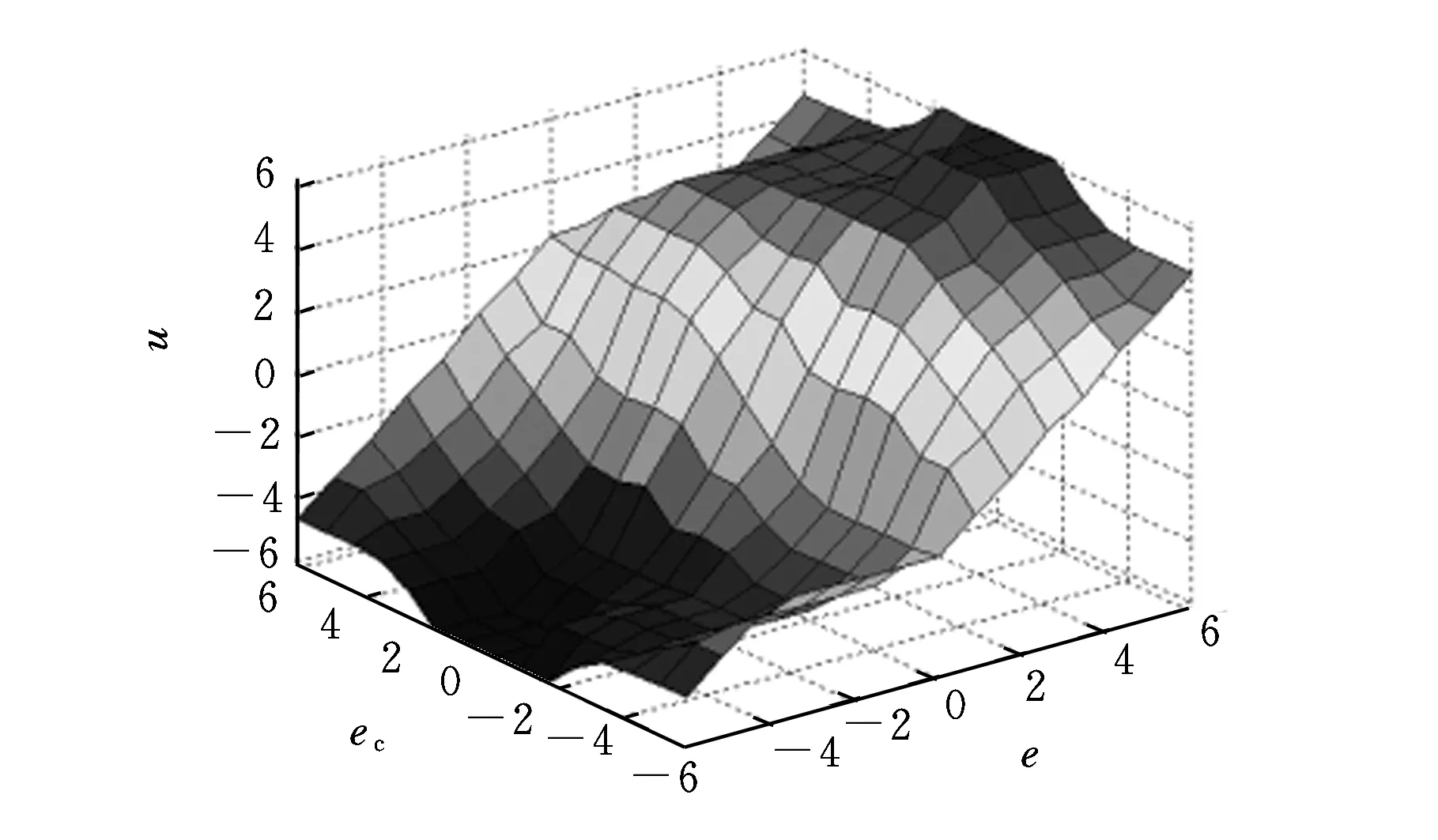
图10 输入量与输出量之间的关系
图11所示为含时滞的模糊控制半主动悬架Simulink仿真模型。

图11 含时滞的模糊控制半主动悬架仿真模型
4.2EHA半主动悬架的预估时滞补偿控制器
4.2.1Smith预估时滞补偿原理
Smith预估补偿控制策略是目前工业领域应用较为广泛的时滞控制策略[12],如图12所示。该方法的基本原理是给系统的控制回路引入一个与悬架系统相并联的反馈环节,即预估补偿器,该环节由预测单元G0(s)和超越单元eτs组成。预测单元提前预测出半主动悬架的动态模型,然后经由超越单元eτs将被延迟了时间τ的被控量提前送入控制器,从而使得悬架作动器提前动作,抵消时滞对于半主动的影响,提高系统的稳定性[13-14]。
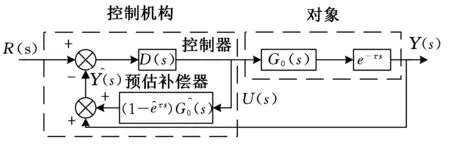
图12 Smith预估补偿控制原理
由于EHA半主动悬架的可控阻尼力是时变的,反馈环节中的Smith预估补偿单元的时滞τ应该根据EHA半主动悬架实时可控阻尼的大小和临界时滞计算公式得出,从而取得动态控制EHA半主动悬架的效果。
4.2.2EHA半主动悬架时滞补偿控制器模型
利用键合图的求解方法得到EHA半主动悬架Simulink仿真模型,并与图11所示的模糊控制器联立。根据图12所示的Smith预估补偿控制原理,在该模糊控制悬架系统中设计时滞预估补偿器,最终得到具有时滞补偿的模糊控制EHA半主动悬架Simulink仿真模型,如图13所示。

图13 EHA半主动悬架时滞补偿控制模型
5 EHA半主动悬架预估时滞补偿控制仿真
5.1时滞对EHA半主动悬架的影响
5.1.1时滞对EHA半主动悬架幅频特性的影响
根据二自由度弹簧质量阻尼系统的幅频特性求法,首先应求出EHA半主动悬架系统的频率响应函数[15]。对式(4)的EHA半主动悬架动力学方程进行傅里叶变换:
(9)
由式(9)得到路面激励对簧载质量位移的幅频特性:
(10)
A1=ks+jωcs-jωcrejωτ
A2=-ω2ms+ks+jωcs-jωcrejωτ
A3=-ω2mu+ks+kt+jωcs-jωcrejωτ
根据式(10)即可得到在不同时滞下的EHA半主动悬架幅频特性曲线,如图14和图15所示。

图14 小时滞对幅频特性的影响
由图14可以看出:随着时滞的增大,EHA半主动悬架系统的一阶和二阶主振型的振动幅值明显增大;同时,一阶主振型的共振频率逐渐增大,二阶主振型共振频率逐渐减小。

图15 大时滞对幅频特性的影响
由图15可以看出:当时滞继续增大时,振动系统会出现多个振峰,车辆会因此而出现“轮跳”现象,从而影响了汽车的行驶平顺性和安全性。
5.1.2时滞对EHA半主动悬架减振性能的影响
EHA半主动悬架参数如下:kt=160 kN/m,ks=16 kN/m,mu=30 kg,ms=210 kg,cs=1 kN·s/m。EHA作动器的参数如下:K=0.0135,q=4×10-6m3/rad,L=60.5 μH,R=0.5 Ω,Ra=0.1 Ω,A=7.6576×10-4m2。
利用图11所示的时滞控制EHA半主动悬架系统仿真模型,进行模糊控制和时滞响应仿真分析,结果如图16和图17所示。
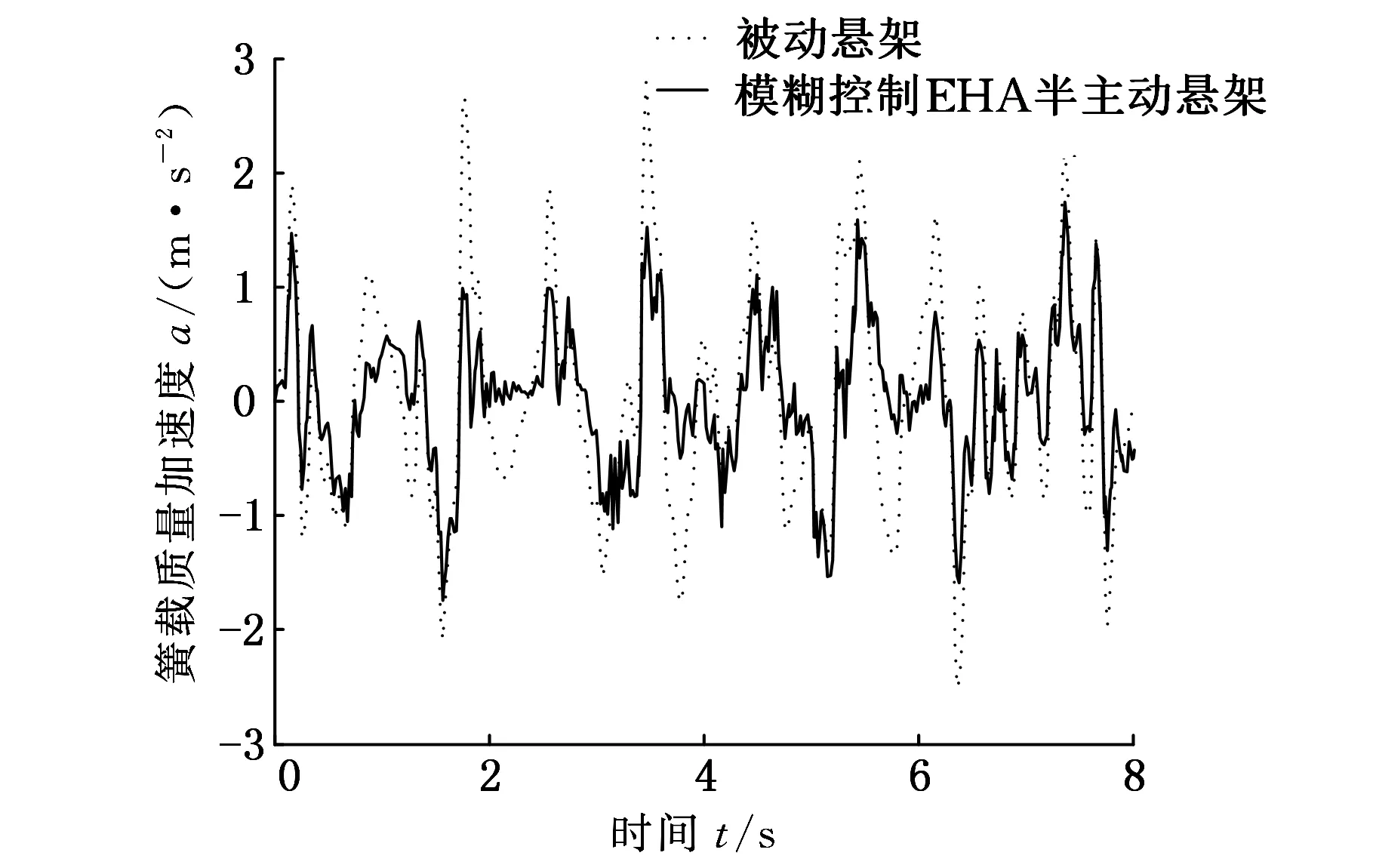
图16 簧载质量加速度响应

图17 不同时滞的簧载质量加速度响应
图16和图17结果表明,不含时滞时模糊控制EHA半主动悬架的簧载质量加速度下降32.38%,汽车平顺性有了大幅提升。随着时滞的增大,EHA半主动悬架的减振性能明显降低。
5.2EHA半主动悬架时滞补偿控制仿真
利用图13所示的具有时滞补偿的模糊控制EHA半主动悬架仿真模型,采用C级白噪声路面谱输入,汽车行驶速度设为40 km/h,对含时滞补偿和不含时滞补偿的模糊控制EHA半主动悬架性能进行对比分析,结果如图18~图21所示。
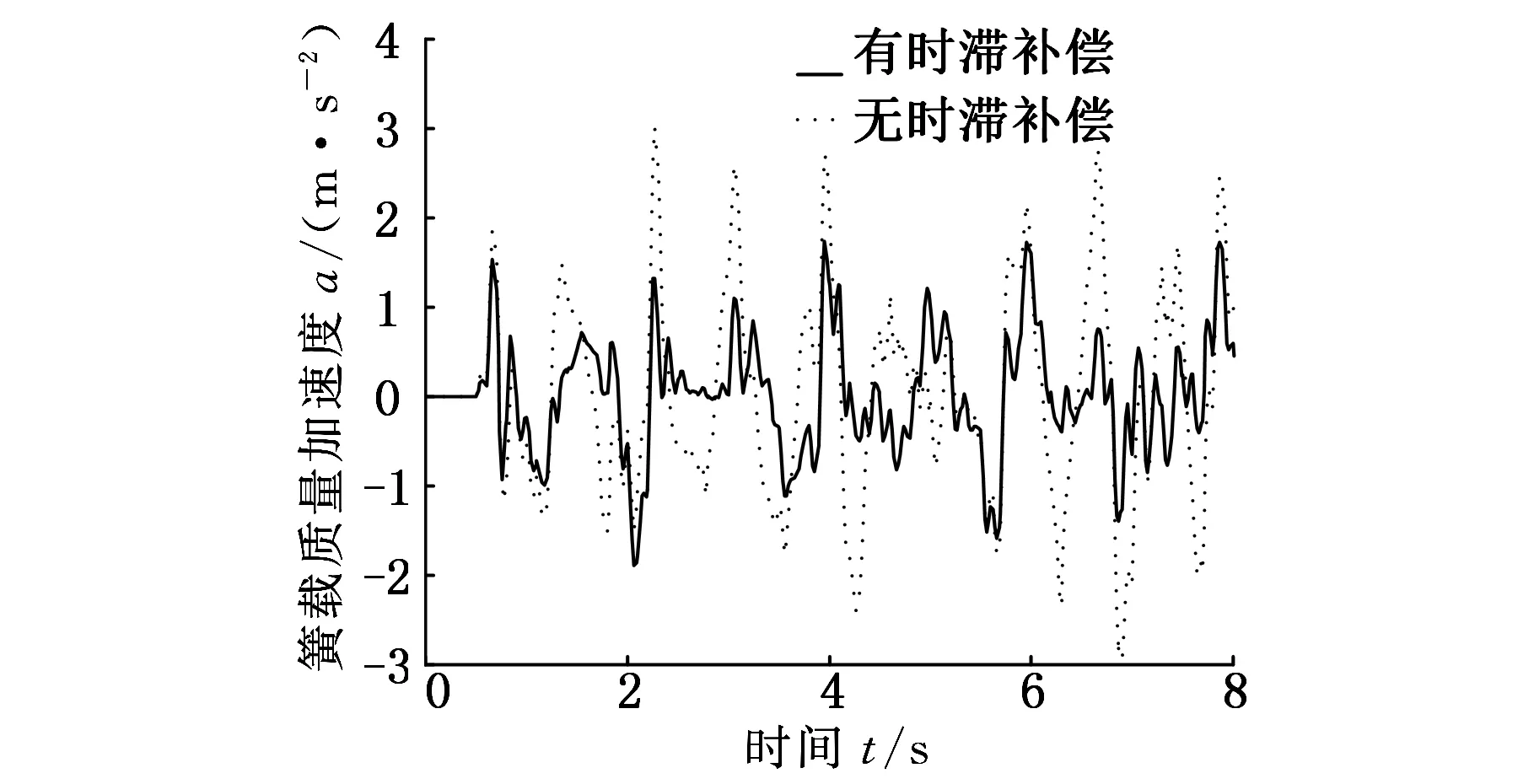
图18 时滞为0.25 s时簧载质量加速度对比
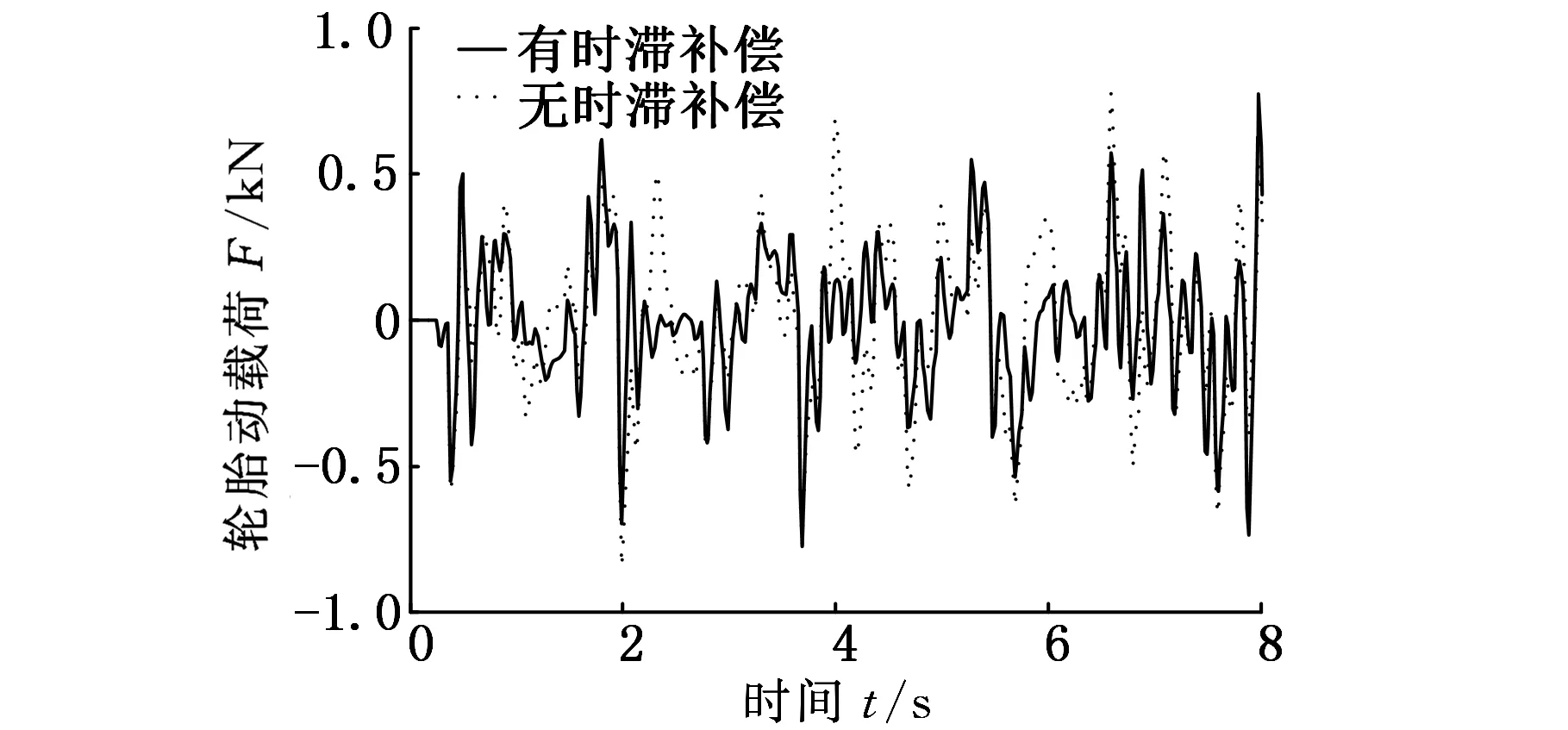
图19 时滞为0.25 s时轮胎动载荷对比

图20 时滞为0.5 s时簧载质量加速度对比
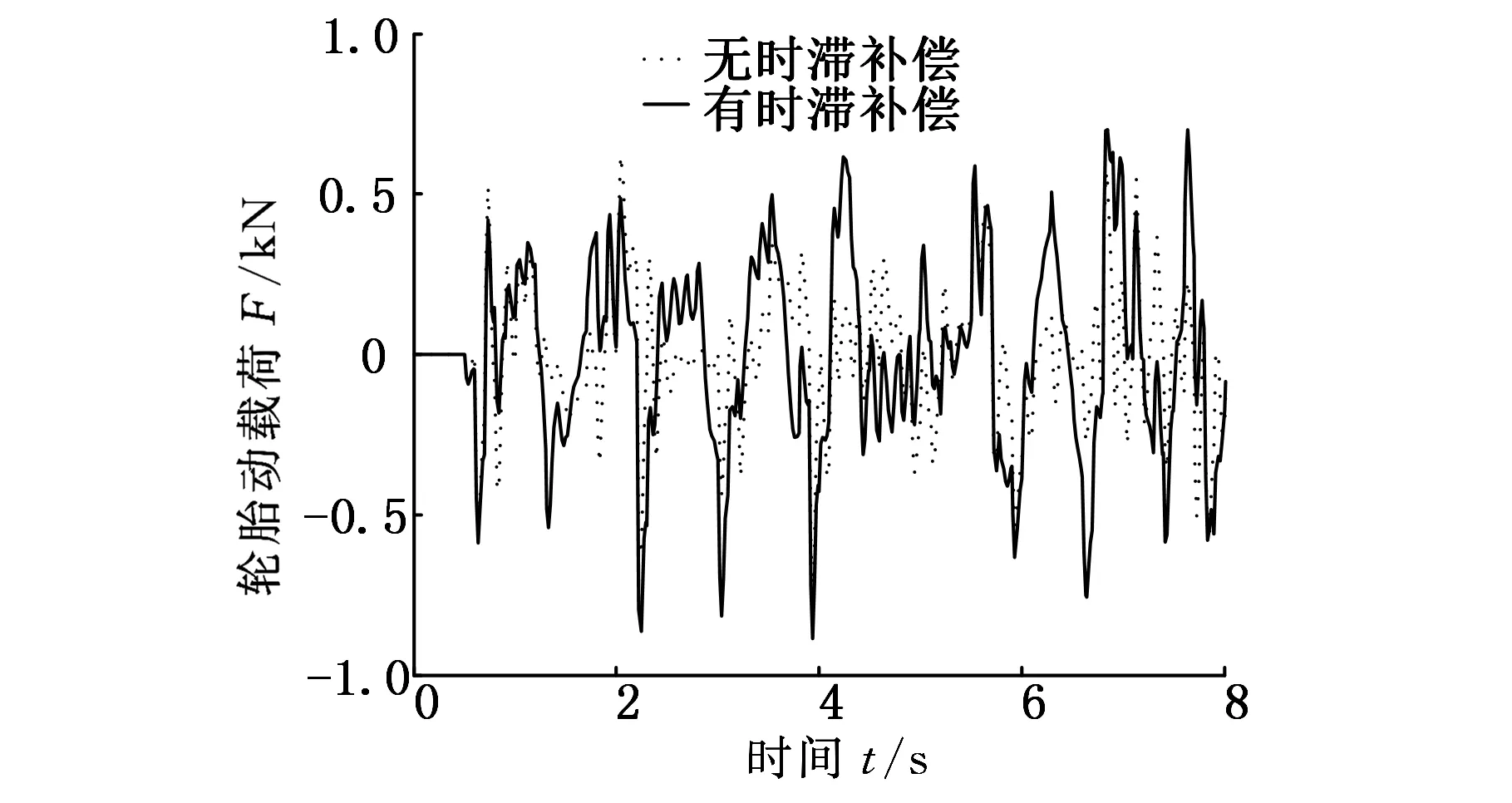
图21 时滞为0.5 s时轮胎动载荷对比
表1给出了含时滞补偿和不含时滞补偿的模糊控制EHA半主动悬架簧载质量加速度和轮胎动载荷的均方根值。
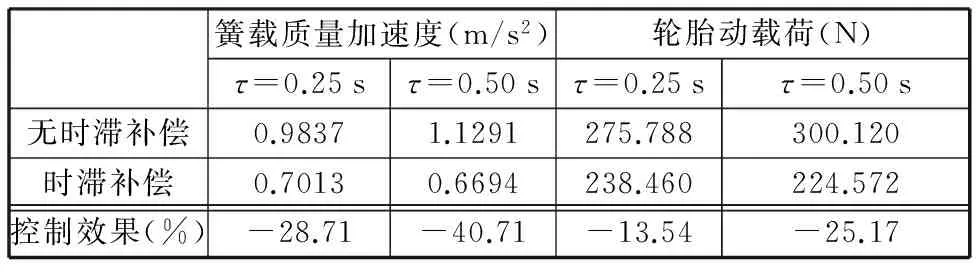
表1 EHA半主动悬架控制响应均方根值
由图18~图21的仿真结果以及表1可以看出:在相同的随机路面输入的情况下,时滞越大,悬架系统的减振效果越差;带有时滞补偿的模糊控制半主动悬架的簧载质量加速度和轮胎动载荷都小于不含时滞补偿的模糊控制半主动悬架的簧载质量加速度和轮胎动载荷,说明时滞补偿能够有效提高模糊控制半主动悬架的减振性能。通过时滞补偿控制,EHA半主动悬架的簧载质量加速度下降约30%,轮胎动载荷减小约20%。
6 结论
(1)本文设计了一种EHA电动静液压半主动悬架结构,该悬架在簧载质量随动工况下,液压泵作为液压马达工作,直流电机作为发电机工作,通过控制调节电磁阻力,实现悬架的半主动控制功能。通过为直流电机串接电阻,实现了EHA半主动悬架的阻尼力可调。试验结果表明,随着直流电机的外接电阻值增大,EHA作动器的阻尼力变小。
(2)计算出EHA半主动悬架统的临界时滞,获得了基值阻尼、可控阻尼与临界时滞的关系曲线。结果显示,当基值阻尼cs大于可控阻尼cr时,悬架系统进入全时滞稳定状态。
(3)应用键合图法建立了EHA时滞模糊半主动悬架模型,分析了时滞对EHA半主动悬架的影响。结果显示,时滞降低了EHA半主动悬架的减振性能,尤其对于大时滞情况,当时滞增大时,振动系统会出现多个振峰,车辆会出现“轮跳”现象,严重影响其平顺性和操纵稳定性。
(4)将Smith预估时滞补偿法应用于EHA半主动悬架中,设计了时滞补偿控制器,并进行了时滞补偿仿真分析。结果表明,EHA半主动悬架时滞补偿控制能够明显减小时滞对悬架性能的影响,为EHA半主动悬架深入研究打下了基础。
[1]Wajdi S A, Mohamed H S, Yuzita Y. Advances in the Control of Mechatronic Suspension Systems[J].Journal of Zhejiang University Science C-Computers & Electronics, 2014, 15(10) :848-860.
[2]寇发荣,方宗德.汽车可控悬架系统的研究进展[J].汽车工程,2007,29(5):426-432.
Kou Farong, Fang Zongde. The Research Trend in Controlled Suspension System of Vehicles[J].Automobile Engineering, 2007, 29(5):426-432.
[3] Kong Y S, Zhao D X, Yang B, et al. Non-fragile Multi-objective Static Output Feedback Control of Vehicle Active Suspension with Time-delay[J].Vehicle System Dynamics, 2014, 52(7):948-968.
[4]闫光辉,关志伟,杜峰,等. 基于时滞稳定的车辆主动悬架控制研究[J].机械强度,2014,36(5):682-686.
Yan Guanghui, Guan Zhiwei, Du Feng, et al. Research on Control of Vehicle Active Suspension Based on Time Delay Stability[J].Journal of Mechanical Strength,2014, 36(5):682-686.
[5]Pang H, Fu W Q , Liu K. Stability Analysis and Fuzzy Smith Compensation Control for Semi-active Suspension Systems with Time Delay[J].Journal of Intelligent & Fuzzy Systems, 2015, 29(6): 2513-2525.
[6]陈龙,汪若尘,江浩斌,等. 含时滞半主动悬架及其控制系统[J].机械工程学报,2006,42(1):130-133.
Chen long, Wang Ruochen, Jiang Haobin, et al. Time Delay on Semi-active Suspension and Control System[J].Chinese Journal of Mechanical Engineering, 2006, 42(1):130-133.
[7]陈龙,汪若尘,江浩斌,等. 半主动悬架及其控制系统的时滞控制研究[J].中国机械工程,2005,16(24):2248-2252.
Chen long, Wang Ruochen, Jiang Haobin, et al. Study on Time Delay Control for Semi-active Suspension and Control System[J].China Mechanical Engineering,2005, 16(24):2248-2252.
[8]孔英秀,赵丁选,杨彬,等. 具有时滞的主动悬架非脆弱H∞/L2-L∞静态输出反馈控制[J].农业机械学报,2014,45(8):1-7.
Kong Yingxiu,Zhao Dingxuan,Yang Bin,et al.Non-fragileH∞/L2-L∞Static Output Feedback Control of Active Suspension with Actuator Input Delay[J].Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8):1-7.
[9]寇发荣,方宗德. 电动静液压作动器EHA及其在汽车主动悬架中的应用[J].机床与液压,2007,35(4):129-131.
Kou Farong, Fang Zongde. Electro-hydrostaticActuator and the Application for Vehicle Suspension[J].Machine Tool & Hydraulics, 2007, 35(4):129-131.
[10]寇发荣. 基于EHA的汽车电-液主动悬架系统的仿真研究[J].系统仿真学报,2009,21(7):2085-2089.
Kou Farong. Study on Simulation for Vehicle Electro-hydrostatic Active Suspension [J].Journal of System Simulation, 2009, 21(7):2085-2089.
[11]庞辉,付文强,刘凯,等. 基于天棚控制的半主动悬架建模及稳定性分析[J]. 汽车工程,2015,37(10):1167-1173.
Pang Hui, Fu Wenqiang, Liu Kai, et al. Modeling and Stability Analysis of Semi-active Suspension with Sky-hook Control [J]. Automotive Engineering,2015,37(10):1167-1173.
[12]郭娜,胡静涛.基于Smith-模糊PID控制的变量喷药系统设计及试验[J].农业工程学报,2014,30(8):56-64.
Guo Na, Hu Jingtao. Design and Experiment of Variable Rate Spaying System on Smith-Fuzzy PID Control [J].Transactions of the Chinese Society of Agricultural Engineering,2014,30(8):56-64.
[13]Nguyen T, Lee M.Smith Predictor Based Fraction-al-order PI Control for Time-delay Processes[J]. Korean J. Chem. Eng., 2014,31(8):1321-1329.
[14]王彦,刘宏立,杨珂.暖通空调控制系统Smith预估器自适应算法设计[J].信息与控制,2011,40(3):408-412.
Wang Yan, Liu Hongli, Yang Ke. Adaptive Algorithm Design of Smith Predictor in HVAC Control System[J]. Information and Control, 2011, 40(3): 408-412.
[15]吴智勇,周翔,胡德文,等. 基于时滞补偿方法的混凝土泵车臂架主动减振[J].中国机械工程,2013,24(24):3283-3288.
Wu Zhiyong, Zhou Xiang, Hu Dewen, et al. Active Vibration Suppression for Boom of Concrete Pump Truck Based on Time-delay Compensation Approach[J].China Mechanical Engineering, 2013, 24(24):3283-3288.
(编辑陈勇)
Time Delay Compensation Control of Semi-active Suspension with Vehicle Electro-hydrostatic Actuator
Kou FarongFan YangqiangZhang Chuanwei Du JiafengWang Zhe
Xi’an University of Science and Technology,Xi’an,710054
To improve the ride comfort and stability of vehicles,a kind of the semi-active suspension with EHA was designed and the mechanical property tests of the electro-hydrostatic actuator were completed. The bond graph models of the time delay fuzzy control for EHA semi-active suspension were established. The critical time delay of the EHA semi-active suspension was calculated.The time delay impacts on the amplitude-frequency characteristics and vibration isolation properties were analyzed. The time delay fuzzy Smith predictive compensation controller was designed. The simulation analyses of the time delay compensation fuzzy control for the EHA semi-active suspension were done. The results show that the EHA semi-active suspension has good damping controllability. However, with the increase of time delay, the “jump vibration” phenomenon happens to the suspension system. Under the time delay compensation fuzzy control of the EHA semi-active suspension, the sprung mass acceleration drops by about 30% and the tire dynamic load drops by about 20%.
electro-hydrostatic actuator(EHA); semi-active suspension; fuzzy control; estimated time delay compensation
2016-03-28
国家自然科学基金资助项目(51275403);高等学校博士学科点专项科研基金资助项目(20126121120003);陕西省自然科学基金资助项目(2014JM7271)
U463.3
10.3969/j.issn.1004-132X.2016.15.022
寇发荣,男,1973年生。西安科技大学机械工程学院副教授、博士。主要研究方向为车辆振动与主动控制。发表论文40余篇。范养强,男,1988年生。西安科技大学机械工程学院硕士研究生。张传伟,男,1974年生。西安科技大学机械工程学院院长、教授、博士。杜嘉峰,男,1993年生。西安科技大学机械工程学院硕士研究生。王哲,男,1992年生。西安科技大学机械工程学院硕士研究生。
