一种高分辨距离像辅助的多目标跟踪算法
2016-09-12李艳艳
靳 标,苏 涛,李艳艳,张 龙
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
一种高分辨距离像辅助的多目标跟踪算法
靳 标,苏 涛,李艳艳,张 龙
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安 710071)
传统跟踪方法仅利用目标的位置信息进行数据关联,在处理多个目标航迹接近或交叉的情况时容易产生航迹合并甚至误跟的现象.笔者针对此问题提出一种高分辨距离像辅助的多目标跟踪算法.首先利用高分辨距离像的姿态敏感性对目标姿态角进行实时估计,然后将姿态角信息融合到目标的观测状态中,构建多维关联波门,利用多维信息进行数据关联,从而将一个多目标数据关联的问题简化为多个单目标数据关联的问题,最后采用概率数据关联——不敏卡尔曼滤波器分别估计各个目标的运动状态.仿真结果表明,通过对目标高分辨距离像信息的充分利用,不仅可以降低多目标数据关联的复杂度,提高数据关联的正确率,而且在姿态角信息的辅助下可以明显提高目标的跟踪精度.
多目标跟踪;数据关联;高分辨距离像;不敏卡尔曼滤波
杂波中的多目标跟踪一直是目标跟踪领域中的热点和难点问题之一[1-3],其关键在于解决量测来源的不确定性,即首先要确认量测点迹是来自于杂波还是目标,以及是来自于哪一个目标.目前比较具有代表性的多目标跟踪算法有多假设检验(Multiple Hypothesis Test,MHT)和联合概率数据关联(Joint Probabilistic Data Association,JPDA)等算法[4-5].MHT算法基于雷达多次扫描的数据,考虑了从起始时刻到当前时刻所有量测值的组合情况.由于该算法需要计算所有假设分支的概率,而随着时间的推移和杂波点个数的增加,假设分支的数目呈指数增长的趋势,因此,MHT算法的计算量非常大[6],无法满足工程应用的实时性要求.JPDA算法的计算量则相对较小,是杂波环境下对多目标进行数据关联的有效算法.但是当目标个数较多或者量测点迹较多时,JPDA算法也会出现组合爆炸、计算量呈指数增长等问题[6-8].为了减少JPDA算法的计算量,cheap-JPDA算法[6]和基于模糊C均值聚类的联合概率数据关联(Fuzzy Clustering Means Joint Probabilistic Data Association,FCM-JPDA)算法[7]分别利用经验公式和隶属度近似各个量测点迹与目标的关联概率,避免了确认矩阵的拆分带来的巨大运算量,但是这两种算法都是以牺牲数据关联的正确率和跟踪精度为代价的.关联波门[5]技术则为实际工程应用提供了一个良好的工具,其利用所跟踪目标的位置预测信息确定目标的量测值在下一时刻出现的范围.那么在数据关联的过程中就可以只考虑此范围内的量测点迹,提高了数据关联的效率.然而,当多个目标的航迹接近或者交叉时,相邻目标的关联波门将会重叠,如果量测点迹落入重叠区域,就有可能出现航迹合并,甚至误跟、失跟的情况.
随着高分辨雷达技术的发展,近年来利用目标的特征信息辅助跟踪的方法越来越受到关注[9-13],这些特征信息可以是目标的雷达散射截面(Radar Cross Section,RCS)、高分辨距离像(High Resolution Range Profile,HRRP)或者逆合成孔径雷达(Inverse Synthetic Aperture Radar,ISAR)图像等.从本质上而言,目标的运动学信息和特征信息从不同空间反映了目标当前的状态,融合目标特征信息用于数据关联,可以提高目标的跟踪性能,而跟踪精度的提高又是获得更加稳健的特征和进行目标识别的基础.文献[9-10]研究了目标的RCS信息辅助多目标跟踪的方法,研究结果表明目标的RCS对跟踪性能的提升非常有限.而且由于目标RCS具有起伏特性,如果在每一个观测周期都利用RCS辅助目标跟踪,甚至会使多目标的数据关联性能下降.文献[11-12]利用一阶马尔科夫模型来刻画分类器的输出结果,研究了分类信息辅助的多目标跟踪方法,取得了较好的效果.但是在大多数情况下,预知非合作目标的类型和先验特征的条件较难满足,而且此方法无法跟踪多个同类目标,因此,分类信息辅助目标跟踪的应用受到一定的限制.文献[13]在利用目标HRRP信息辅助目标跟踪时,为了处理问题方便,将目标的运动状态信息与特征信息视为两个相互独立的量,将距离像信息用于表征不同的目标或不同的目标类型,从而辅助跟踪过程中的数据关联,以解决复杂环境下(特别是空间间隔较近或交叉运动)的多目标跟踪问题.然而,目标的距离像是姿态敏感量[14],即距离像会随着目标的运动状态而变化,因此,二者并不是两个简单的独立分量.事实上,距离像特征与目标的运动状态之间有着一定的内在联系[15],这种联系为距离像辅助多目标跟踪提供了潜在的可能,而且这种可能性不仅仅是辅助多目标间的数据关联,还有利于提高各个目标的跟踪精度.基于此,笔者提出一种HRRP信息辅助的多目标跟踪算法.与现有的研究不同,文中首先利用目标的HRRP与运动状态之间的相关性,快速估计出目标的姿态角.然后将姿态角融合到目标的观测状态向量中,构建多维关联波门以完成数据关联过程.最后利用概率数据关联——不敏卡尔曼滤波器(Probabilistic Data Association-Unscented Kalman Filter,PDA-UKF)分别对各个目标的运动状态进行估计.仿真结果表明,文中算法利用HRRP信息辅助多目标跟踪,不但提高了目标密集区域数据关联的正确率,降低了数据关联的计算量,而且在目标HRRP信息的辅助下提高了跟踪精度.
1 利用HRRP估计目标的姿态角
目标的姿态角在不同的应用场景中具有不同的定义及表达形式.高分辨雷达对空中目标进行观测时,利用单个雷达的单次HRRP样本只能得到目标的指向与雷达视线之间的夹角,如图1所示.假设目标不发生机动,即不存在攻角和侧滑角时,目标的速度方向与其指向是一致的.这样,在非机动情况下,可以将目标的姿态角定义为速度矢量与其位置矢量的夹角,即其中,(x,y)和(̇x,̇y)分别为目标的位置矢量和速度矢量.由于空中目标的形状一般都具有对称性,因此,可以将姿态角的范围限制为0°≤β≤180°.


图1 姿态角的定义

图2 姿态角估计方法流程图
根据散射点模型理论[14],高分辨距离像的各分量可认为是由同一距离单元中多个散射点回波相关叠加而成的.HRRP信息反映了在一定的雷达视角内,目标上散射体(如机头、机翼、机尾等)的RCS沿雷达视线的分布情况,体现了散射点的相对几何关系.因此,HRRP信息含有目标重要的结构特征,反映了目标的固有属性.当目标相对于雷达视线的姿态角发生变化时,散射点之间的相对径向距离发生变化,这会从两个方面引起目标HRRP的姿态敏感性:其一是子回波包络的位移,其二是子回波间相位差变化.这种姿态敏感性也正是利用雷达一维距离像估计目标姿态角的依据.
文中采用模板匹配[16]的方法估计目标的姿态角,具体流程如图2所示.其基本步骤是:首先将目标姿态角范围按照所需精度分为M个区间,预先存储各个区间的目标HRRP模板.然后用实时得到的HRRP样本同模板进行匹配,按照一定的判别指标,得到目标的姿态角.需要指出的是,普通的模板匹配法必须将实时的HRRP样本与模板库中的每个模板逐个匹配以搜索最优模板,因此,计算量巨大.实际上雷达在跟踪状态下得到目标的运动状态信息后,可以利用式(1)对目标的姿态角进行预估,这样就可以在一个较小的范围内搜索最优值,一方面可以节省计算量,另一方面可以剔除姿态角估计的野值.
2 姿态角信息辅助的多目标跟踪算法
2.1扩展模型描述
假设跟踪区域中有J个目标,第j(j=1,2,…,J)个目标在二维平面内的状态模型为


其中,I2为二维的单位矩阵,⊗代表Kronecher积,Δt为观测间隔.状态噪声wjk~N(0,Qjk),其中

将目标的姿态角信息加入到目标的观测状态向量中,可以定义综合观测状态为



2.2关键步骤分析与算法流程
关联波门是数据关联的重要底层支持技术,目标跟踪过程中只有进入关联波门的量测点迹才能成为候选回波.因此,关联波门的设计直接影响数据关联的性能,进而影响多目标的跟踪性能.姿态角信息属于目标自身的运动特征,航向不同的目标具有不同的姿态角,因此,可以将姿态角加入到目标的观测状态中,重新构建关联波门,利用多维信息剔除无关点迹.算法原理在于目标的HRRP信息具有姿态敏感性,利用目标的HRRP信息可以获取其运动状态新一维的观测数据,增加了观测状态向量的维数.这样就可以构建多维关联波门,利用多维信息分别筛选出各个目标的有效量测,从而将一个多目标数据关联问题转化为多个单目标数据关联的问题.如图3所示,文中算法首先通过模板匹配法得到目标的姿态角,然后将其加入目标的观测状态,构建多维关联波门,快速准确地筛选出各个目标的有效量测,最后再对每个目标分别采用PDA-UKF算法[4-5]估计其运动状态.同时,目标的运动状态估计结果可以用来预测下一时刻姿态角的范围,以辅助姿态角的估计.文中算法的关键在于多维关联波门的构建以及有效量测的筛选.接下来对此步骤予以详细说明.

图3 文中算法流程框图
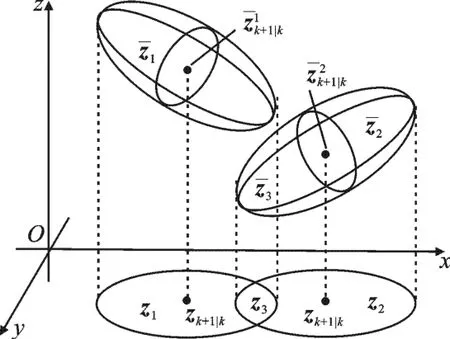
图4 多维关联波门的示意图
传统的关联波门只利用目标的位置信息预测目标的观测值可能出现的范围,当多个目标的航迹接近或交叉时,相邻目标的关联波门将会重叠.如果量测点迹进入重叠区域,就有可能发生航迹合并或误跟等现象.文中将目标的HRRP样本对应的姿态角加入目标的观测向量中,构建多维关联波门,利用多维信息可以将重叠区域的量测点迹进行有效筛选.如图4所示,在利用多维关联波门后,原来两个关联波门重叠区域的量测点迹z3即可正确关联.由于观测模型式(7)的非线性程度较高,文中采用滤波精度较好的UKF[5,17]算法,可以得到综合量测的预测值,即目标j的多维关联波门中心为




利用多维关联波门分别对各个目标的量测点迹进行确认后,一个多目标数据关联问题就简化为多个单目标数据关联的问题,然后再对各个目标分别使用PDA-UKF算法,即利用目标的综合状态信息计算关联概率,并进行状态更新.PDA-UKF算法是较成熟的杂波中单目标跟踪算法,由于篇幅有限,具体算法流程不再赘述,读者可以参考文献[4-5].
3 仿真结果及分析
以二维跟踪场景中航迹发生交叉的3个匀速直线运动目标为跟踪对象,将文中算法与传统只利用目标位置信息进行数据关联的JPDA算法(以下简称传统JPDA算法)及其改进算法,即cheap-JPDA算法[6]和FCM-JPDA算法[7]进行了对比.

表1对比了文中算法和3种传统算法的各项跟踪性能指标.图5以目标1为例,给出了两种算法在0~60 s内(在此时间段内,两种跟踪算法均未发生失跟情况)的距离和速度跟踪的均方根误差.其他两个目标的跟踪均方根误差结果类似,限于篇幅的原因,此处予以省略.传统JPDA算法只利用目标的位置信息构建关联波门,在目标航迹发生交叉的情况下,数据关联的效率较低.cheap-JPDA算法和FCM-JPDA算法分别利用经验公式和隶属度近似关联概率,避免了传统JPDA算法中对确认矩阵的拆分,降低了运算量,但是也牺牲了数据关联的正确率和跟踪精度,如表1所示.而文中算法利用目标的特征信息辅助跟踪,将目标的姿态角加入到观测状态向量中,构建多维关联波门以筛选有效量测,降低了失跟率.表1中也给出了文中算法和传统JPDA算法单次Monte-Carlo仿真的运行时间.计算机仿真环境为3.2 GHz主频,4 GB内存,Windows 7操作系统,Matlab R2008b仿真软件.传统JPDA算法的关键步骤在于可行矩阵的确认及其权值的计算,当目标个数较多或者量测点迹较多时,将出现组合爆炸、计算量呈指数增长等问题.笔者利用多维信息筛选有效量测,大大减少了进入关联波门的量测个数,从而减少了运算量,提高了多目标跟踪算法的实时性.同样,从表1和图5可以看出,文中算法的跟踪精度也大大提高.这是因为文中算法加入了目标姿态角的估计,多了一维运动状态观测信息,提高了目标位置和速度的跟踪精度。
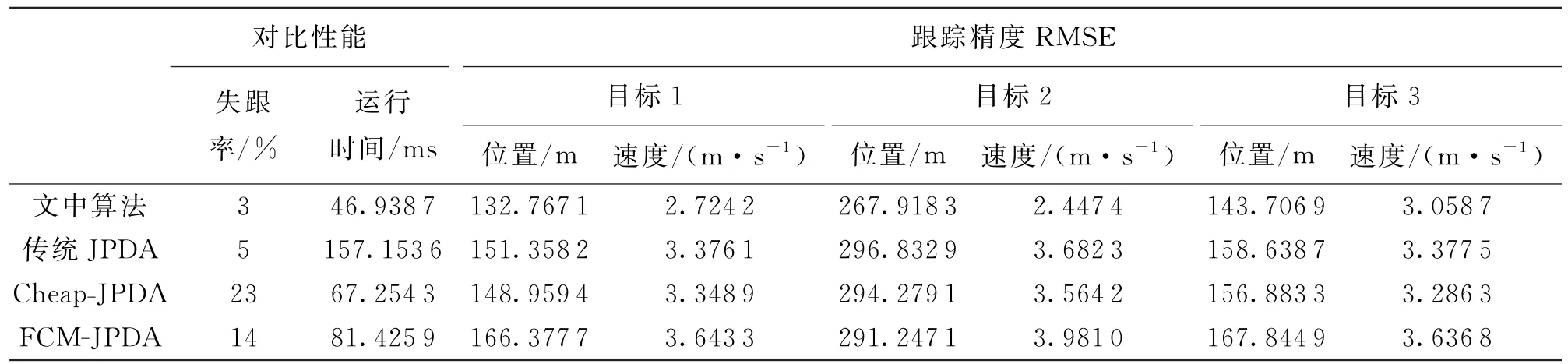
表1 文中算法与3种传统算法的跟踪性能比较
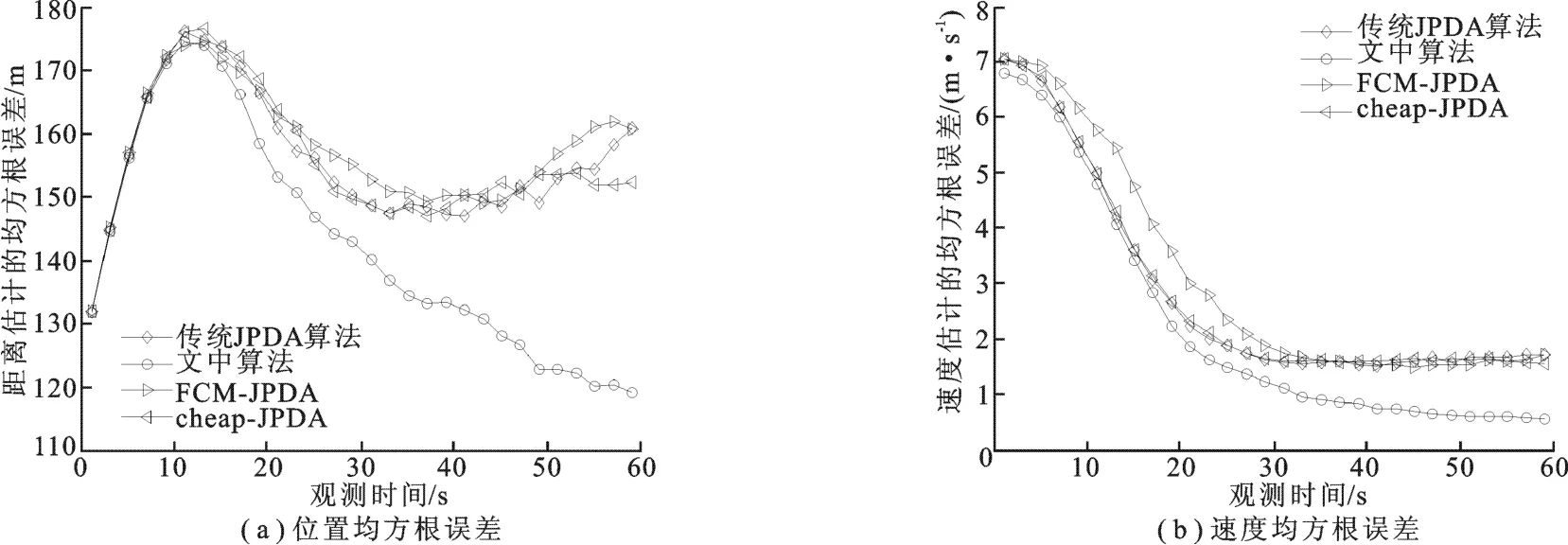
图5 不同跟踪算法对目标1的跟踪精度对比
4 结 论
传统基于目标位置信息的关联波门技术在处理目标航迹接近或交叉的问题时,容易出现航迹合并甚至错跟的现象,文中针对此问题提出了一种高分辨距离像辅助多目标跟踪的算法.与之前的研究不同,笔者首先利用目标HRRP信息的姿态敏感性,用模板匹配法得到目标HRRP样本对应的姿态角,然后将目标的姿态角信息加入状态观测向量中,构建多维关联波门,利用多维信息筛选有效量测,从而降低了失跟率,同时也减少了算法运算量,提高了跟踪精度.
由于文中算法的数据关联正确率和跟踪精度与目标的姿态角有着很大关系,当多个目标的航迹接近且平行飞行时,各目标的姿态角相同,这时文中算法的跟踪性能将受到一定的限制.
[1]MALLICK M,VO B,KIRUBARAJAN T,et al.Introduction to the Issue on Multitarget Tracking[J].IEEE Journal of Selected Topics in Signal Processing,2013,7(3):373-375.
[2]GONG J,FAN G,YU L,et al.Joint Target Tracking,Recognition and Segmentation for Infrared Imagery Using a Shape Manifold-based Level Set[J].Sensors,2014,14:10124-10145.
[3]ZHANG P,LIN Y.Adaptive Data Association Prior Estimation for Target Tracking Based on Sequential Monte Carlo Filter[J].Journal of Computational Information Systems,2014,10(11):4803-4810.
[4]CHALLA S,MORELANDE M R,MUSICKI D,et al.Fundamentals of Object Tracking[M].Cambridge:Cambridge University Press,2011:22-60.
[5]何友,修建娟,张晶炜,等.雷达数据处理及应用[M].2版.北京:电子工业出版社,2009:129-147.
[6]BAR-SHALOM Y,BLAIR W D.Multitarget-multisensor Tracking Applications and Advances,VolumeⅢ[M]. Boston:Artech House,2000:161-197.
[7]张刚,廖阳,刘强.一种改进的基于FCM的目标跟踪数据关联算法[J].空军工程大学学报(自然科学版),2010,11 (1):36-39. ZHANG Gang,LIAO Yang,LIU Qiang.An Improved Multi-target Tracking Data Association Algorithm Based on FCM[J].Journal of Air Force Engineering University(Natural Science Edition),2010,11(1):36-39.
[8]王芝,徐晓滨,刘伟峰,等.两类典型多目标跟踪算法性能分析与比较[J].电子与信息学报,2010,32(7):1633-1637. WANG Zhi,XU Xiaobin,LIU Weifeng,et al.Performance Analysis and Comparison of Two Classic Algorithms in Multi-target Tracking[J].Journal of Electronics&Information Technology,2010,32(7):1633-1637.
[9]EHRMAN L M,BLAIR W D.Using Target RCS When Tracking Multiple Rayleigh Targets[J].IEEE Transactions on Aerospace and Electronic Systems,2010,46(2):701-716.
[10]EHRMAN L M,BLAIR W D.Impact of Noncoherent Pulse Integration on RCS-assisted Tracking[J].IEEE Transactions on Aerospace and Electronic Systems,2009,45(4):1573-1579.
[11]BAR-SHALOM Y,KIRUBARAJAN T,GOKBERK C.Tracking with Classification-aided Multiframe Data Association [J].IEEE Transactions on Aerospace and Electronic Systems,2005,41(3):868-878.
[12]MEI W,SHAN G,LI X R.Simultaneous Tracking and Classification:a Modularized Scheme[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(2):581-599.
[13]HONG L,CUI N,PRONOBIS M,et al.Local Motion Feature Aided Ground Moving Target Tracking with GMTI and HRR Mmeasurement[J].IEEE Transactions on Automatic Control,2005,50(1):127-133.
[14]吴顺君,梅晓春.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008:315-323.
[15]祝依龙,范红旗,付强,等.雷达目标特征信号与运动模式的相关性研究[J].中国科学:信息科学,2012,42(7):907-922.ZHU Yilong,FAN Hongqi,FU Qiang,et al.Relationship between Radar Target Signatures and Motion Modes[J]. Science China:Information Science,2012,42(7):907-922.
[16]樊建鹏,范红旗,卢再奇.基于高分辨距离像的目标姿态角估计算法[J].系统工程与电子技术,2012,34(12):2413-2417.FAN Jianpeng,FAN Hongqi,LU Zaiqi.Pose Estimation Algorithm Based on High Range Resolution Profile[J]. Systems Engineering and Electronics,2012,34(12):2413-2417.
[17]张凯,单甘霖,吉兵,等.基于姿态角辅助非线性滤波算法的机动目标跟踪[J].电子学报,2012,40(8):1670-1675. ZHANG Kai,SHAN Ganlin,JI Bing,et al.Maneuvering Targets Tracking Based on Pose-aided Nonlinear Filter Algorithm[J].Acta Electronica Sinica,2012,40(8):1670-1675.
(编辑:李恩科)
Multi-target tracking algorithm aided by a high resolution range profile
JIN Biao,SU Tao,LI Yanyan,ZHANG Long
(National Key Lab.of Radar Signal Processing,Xidian Univ.,Xi’an 710071,China)
When the tracks of the multi-target get approached or crossed,it is easy to lead to combining or even to get wrong tracks for the traditional tracking methods,since the traditional methods only utilize the information on the target position to finish the data association.Aiming at this problem,a multi-target tracking algorithm aided by the high resolution range profile(HRRP)is proposed in this paper.Firstly,the target attitude angle is estimated in real time on the principle that the HRRP is sensitive to the attitude angle.And then the attitude angle is added to the target measurement state to construct a multi-dimension correlating gate.The data association is accomplished with the multi-dimension information.So the problem of multi-target data association is simplified to multiple sub-problems of data association for a single target.Finally,each target motion state is estimated by the probabilistic data association-unscented Kalman filter(PDA-UKF).Simulation results reveal that the computing complexity is reduced,and that the correct probability of data association is improved by using the target HRRP on the one hand.On the other hand,the tracking accuracy is improved with the aid of the target attitude angle.
multi-target tracking;data association;high resolution range profile(HRRP);unscented Kalman filter(UKF)
TN953
A
1001-2400(2016)01-0001-06
10.3969/j.issn.1001-2400.2016.01.001
2014-09-22 网络出版时间:2015-04-14
国家自然科学基金资助项目(61271291,61201285);新世纪优秀人才支持计划资助项目(NCET-09-0630);陕西省自然科学基础研究计划资助项目(2012JM8015);陕西省教育厅专项计划资助项目(12JK0530,12JK0557);中国博士后科学基金资助项目(2013 M542329)
靳 标(1986-),男,西安电子科技大学博士研究生,E-mail:jinpuresky@hotmail.com.
网络出版地址:http://www.cnki.net/kcms/detail/61.1076.TN.20150414.2046.001.html
