四种坐标系下的多电平SVPWM快速性对比分析*
2016-09-09唐雄民冯锵健孟志强陈思哲
唐雄民,冯锵健,孟志强,王 翠,张 淼,陈思哲
(1.广东工业大学 自动化学院,广东 广州 510006;2.湖南大学 电气与信息工程学院,湖南 长沙 410082)
四种坐标系下的多电平SVPWM快速性对比分析*
唐雄民1†,冯锵健1,孟志强2,王翠1,张淼1,陈思哲1
(1.广东工业大学 自动化学院,广东 广州510006;2.湖南大学 电气与信息工程学院,湖南 长沙410082)
如何在电平数目较多的多电平电路中快速地实现空间矢量调制(SVPWM:Space Vector PWM)算法是多电平技术所必须解决的一个关键问题.为解决这一问题,国内外学者提出了多种在不同坐标系下实现多电平SVPWM的算法,但目前尚未有对这些多电平SVPWM算法快速性的对比分析.为此,本文从一个采样周期内完成在实际中得到广泛应用的4种多电平SVPWM算法所需的各类运算的运行次数出发,对这4种坐标系下的多电平SVPWM算法实现的快速性进行了对比分析.理论分析和实验结果表明,在45°坐标系下实现多电平SVPWM算法不仅具有运行量少的优点而且具备对电路进行优化控制便利的特性,是一种可优先使用的坐标系.
多电平;空间矢量调制;坐标系;快速性
目前,多电平技术已广泛应用到中、高压大功率变流器中[1-3].多电平调制算法作为实现多电平技术的关键一环,也自然成为国内外学者研究的热点[2-3].多电平电路的调制主要有载波调制和空间矢量调制两大类[2-3].相对载波调制,空间矢量调制(SVPWM)具有开关频率低和直流电压利用率高等优势[4-5],在多电平电路中得到了广泛的应用.经典的多电平SVPWM算法大都采用参考电压分解的方法[4, 6-7],该方法通过在多电平空间矢量图中,将参考电压矢量分解成为偏移矢量和两电平分矢量,然后用类似两电平空间矢量的方法确定构成小三角形3个顶点的矢量并计算对应的作用时间,由于该多电平SVPWM算法在αβ坐标系下完成,空间矢量坐标都不为整数,在实现多电平SVPWM算法过程中需要进行大量的无理数运算,算法的实时性较差.为进一步降低多电平SVPWM算法的运算量,国内外学者提出了多种在不同坐标系下实现多电平SVPWM算法的方法,例如文献[8]提出了一种在60°坐标系(也称g-h坐标系)中实现多电平SVPWM算法的方法,该方法通过改变参考轴的位置,使空间矢量坐标在新的坐标系下为整数,进而简化参考矢量定位的问题.文献[9]提出一种在45°坐标系(也称α′β′ 坐标系)中实现多电平SVPWM算法的方法,该方法不仅将αβ坐标系下的空间矢量进行逆时针或顺时针旋转45°,而且对原有空间矢量的纵横坐标进行了比例调整,使得矢量的坐标在新的坐标系下都为整数,且相邻矢量之间的坐标增量绝对值都等于1,形成的45°坐标系,从而简化参考电压矢量的定位和3个合成矢量的作用时间的计算.文献[10-11]则利用多电平电路输出电压在三维空间中自然呈现坐标为整数的正立方体结构,提出了一种基于abc坐标系(也称三维坐标系)的多电平SVPWM算法的实现方法.文献[12-13]也提出了在不同坐标系下实现多电平SVPWM算法的方法.这些改进型多电平SVPWM算法的实现速度都较经典的多电平SVPWM算法的实现速度有了较大的提升,但遗憾的是,目前尚无相关文献对这些改进型多电平SVPWM算法(特别是在实际中得到广泛应用的几种多电平SVPWM算法)的实现速度进行对比分析.针对这一问题,本文对目前已得到广泛应用的4种多电平SVPWM算法的快速性进行了对比分析.文中从多电平SVPWM算法的实现主要环节(包括:参考矢量生成、参考矢量定位及合成矢量选择和不同矢量作用时间计算)的计算量(包括:查表、加减法、乘法、条件判断、逻辑运算、数据存储和数据类型转换的运行次数统计)进行了详细的对比分析,得出了在45°坐标系和60°坐标系下实现多电平SVPWM算法所用时间最短、在abc坐标系下实现多电平SVPWM算法所用时间其次、在αβ坐标系实现多电平SVPWM算法所用时间最长这一结论.本文的研究工作为科研工作者和工程技术开发人员合理选择多电平SVPWM实现方法提供了理论依据,具有一定的工程实践价值.
1 多电平SVPWM算法实现的一般过程
一般来说,多电平SVPWM算法的实现大致可分为下述5个步骤:
1)离线生成由多电平矢量构成的多电平空间矢量图;
2)在线形成参考矢量;
3)在线完成参考矢量在矢量图中的定位,选择多个用于合成参考矢量的多电平矢量;
4)在线计算用于合成参考矢量的各个矢量作用时间;
5)根据特定的约束条件,输出与矢量对应的三相多电平电路的开关状态.
现阶段多电平SVPWM算法基本由微处理器来实现.步骤1)的作用是在微处理器中形成一个与矢量图对应的表格,以便在计算过程中进行查询.待完成步骤1)至步骤4)后,再通过微处理器中的定时器中断来完成步骤5).为屏蔽微处理器的不同结构和特定约束条件对多电平SVPWM算法计算量的影响,本文做出如下假设:
1)多电平SVPWM中使用的矢量表由离线生成,且算法实现过程涉及的数据类型均为同等长度的浮点型,三角函数的计算由查表法获得;
2)微处理器中所有单次查表执行的时间相同、单次数据传递时间相同,不考虑算法实现过程中程序的中间变量存储、计算和传输等对算法实现的影响;
3)认为同一类型运算在执行过程中所需时间相同;
4)步骤5)的实现仅考虑将矢量作用时间存入对应定时器中断的寄存器中,不考虑定时器中断响应过程和特定约束条件对这一步骤的影响.
2 4种算法中参考矢量生成的计算量
不失一般性,设abc坐标系下参考矢量Ur(ar,br,cr)的表达式为:
(1)
式中:U*为参考矢量幅值;ω为参考矢量的角频率;t为时间;ar,br和cr分别为Ur在abc坐标系下的坐标值.
由式(1)可得,在αβ坐标系、45°坐标系和60°坐标系下参考矢量Ur(Urα,Urβ),Ur(Urα',Urβ')和Ur(Urg,Urh)的表达式分别为:
(2)
(3)
(4)
通过式(1)-式(4)便可以统计出不同坐标系下参考矢量形成环节所需的计算量.例如,在第1节的假设条件下,要形成参考矢量Ur在αβ坐标系下的某一时刻具体数值需要进行3次乘法运算和数据存储(即求取并存储ω×t,U*×sin(ωt)和U*×cos(ωt)的值)和二次查表运算(即查表sin(ωt)和cos(ωt)的值).表1给出了不同坐标系下参考矢量形成的计算量.
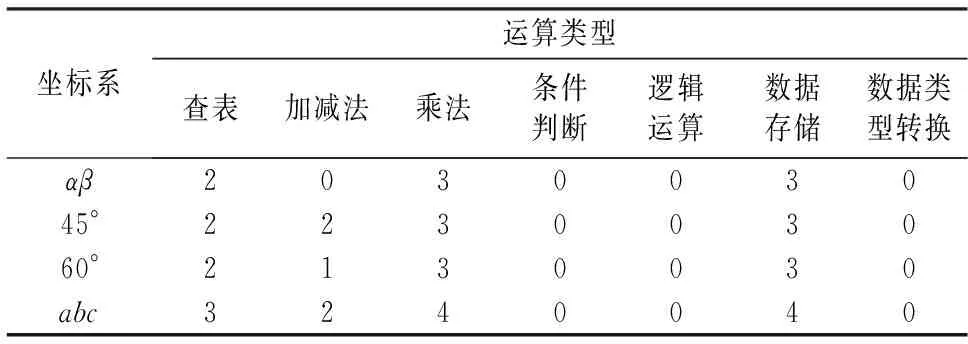
表1 不同坐标系下参考矢量形成的计算量
3 4种算法中参考矢量定位及矢量选择的计算量分析
3.1αβ坐标系

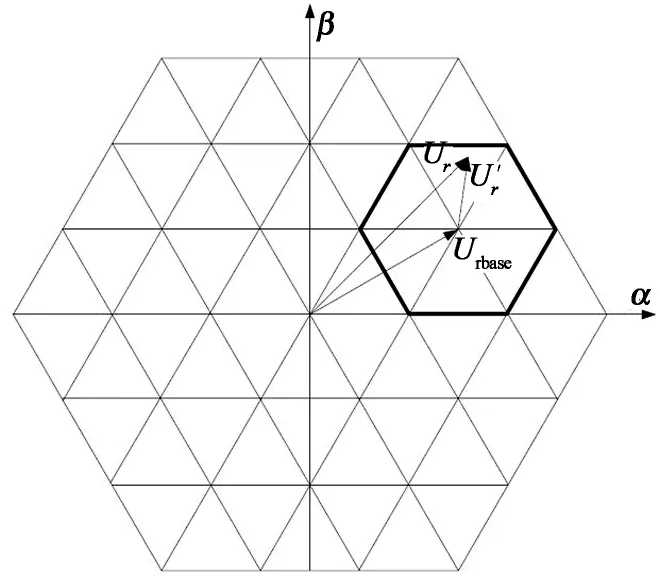
图1 参考矢量分解示意图
基于上述原理,参考矢量定位过程可以分为以下2个步骤:
1)确定偏移矢量;
2)利用扇区划分的方法确定其余两个矢量.
通过结合两电平空间矢量生成算法[14],可得在αβ坐标系下参考矢量定位及合成矢量选择计算量如表2所示.
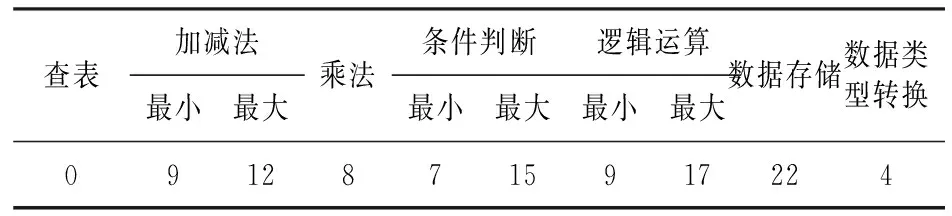
表2 αβ坐标系下矢量定位及合成矢量选择的计算量
3.245°和60°坐标系
不论是在45°还是60°坐标系,在参考矢量定位和矢量选择环节都是先计算获得包围参考矢量的四边形4个顶点坐标,然后通过判定参考矢量与辅助直线的位置来选择用于矢量合成的3个矢量.虽然2种坐标系下参考矢量对应的旋转矩阵的系数和辅助直线表达式存在差异,但对于浮点型的微处理器而言,计算量没有区别.本节以60°坐标系为例,来分析这2种坐标系下参考矢量定位及矢量选择的计算量.
式(5)给出了包围参考矢量Ur(Urg,Urh)的4个矢量Ugh0,Ugh1,Ugh2和Ugh3的坐标表达式,式(6)则给出了辅助直线的表达式.
(5)
(Ugh1,Ugh2,Ugh3)=
(6)
式中:函数floor()为向下取整函数,可由2条条件语句、2条逻辑判断语句、2条数据类型转换语句和1条减法语句构成;Ugh0g和Ugh0h分别为矢量Ugh0在坐标系下的横纵坐标.
表3给出了45°和60°坐标系下参考矢量定位及合成矢量选择的计算量.

表3 45°和60°坐标系下矢量定位及合成矢量选择的计算量
注:1表示包含函数floor( )的条件判断;2表示根据参考矢量的位置不同,函数floor( )会执行不同分支.
3.3abc坐标系
abc坐标系下参考矢量定位及矢量选择可由式(7)和式(8)来描述,其中式(7)获得包围矢量Ur(ar,br,cr)的单位立方体(图2给出了三电平电路在abc坐标系下形成的三维空间矢量图)的最接近原点的坐标.式(8)则给出了用于合成矢量的4个矢量Ul0,Ul1,Ul2和Ul3的表达式.
(7)

图2 三电平电路在abc坐标系下形成的三维空间矢量图
(Ul0,Ul1,Ul2,Ul3)=
(8)
其中Ui(i=0,1,…,7)为形成单位立方体的8个空间矢量,其表达式分别为:U0(a,b,c),U1(a+1,b,c),U2(a+1,b,c+1),U3(a+1,b+1,c+1),U4(a,b,c+1),U5(a,b+1,c+1),U6(a,b+1,c)和U7(a+1,b+1,c).
表4给出了abc坐标系下参考矢量定位及合成矢量选择的计算量.
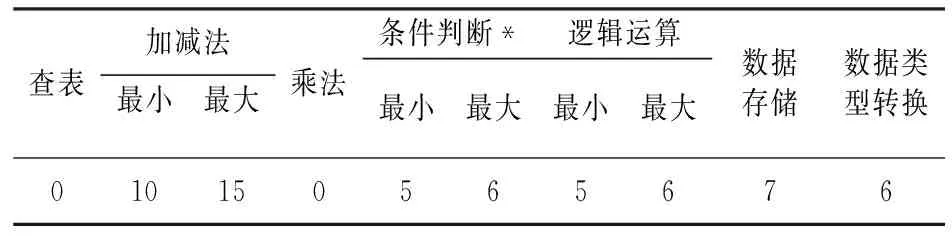
表4 abc坐标系下矢量定位及合成矢量选择的计算量
注:*表示包含函数floor( )中的条件判断.
4 不同坐标系下的不同矢量作用时间计算量分析
在获得用于合成参考矢量的多个矢量后,根据伏秒平衡原理(式9),可得到各个矢量作用时间.
(9)
式中:Ubi和Ti分别为通过第3节获得的多个矢量及其在一个采样周期Ts中的作用时间.表5-表7 分别给出了不同坐标系下矢量作用时间的计算量.

表5 αβ坐标系下矢量作用时间的计算量
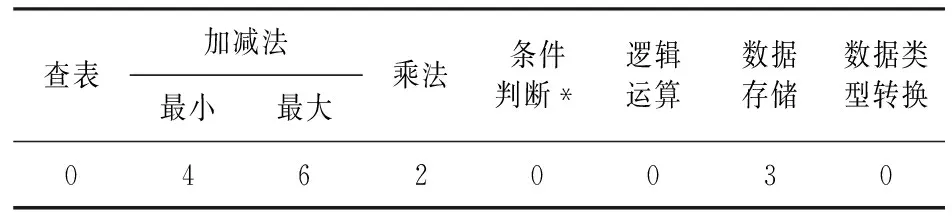
表6 45°和60°坐标系下矢量作用时间的计算量
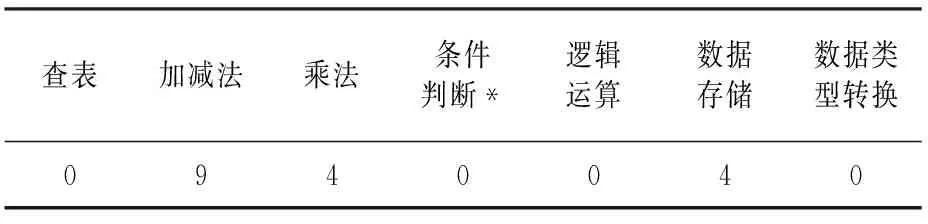
表7 abc坐标系各个矢量作用时间的计算量
注:在表5至表7中,*表示实际编程中条件判断语句可与矢量选择中的条件判断语句合并.
5 实验平台及实验结果
为了验证本文结论的正确性,笔者构建了一套级联型7电平逆变器系统.其中,微控制器采用了型号为TMS320F28335的 32位浮点型DSP(TI公司)、驱动电路采用高速光耦6N137加IR2110的结构、功率开关的型号为IRFP460、采用9台200 W隔离变压器经过二极管整流桥构成多电平逆变器所需的9路隔离直流电源,实验中采用的直流电压幅值为50 V.图3为实验平台的实物图,图4为不同坐标系下的3级7电平电路在控制周期为5 kHz、参考矢量的调制系数m=0.85时的实验波形,其中CH1和CH2分别为A,B相输出电压.
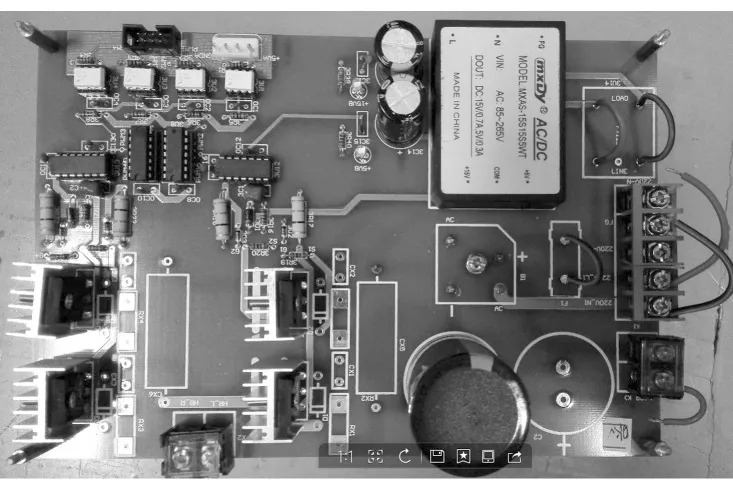
(a)单个H桥实物图
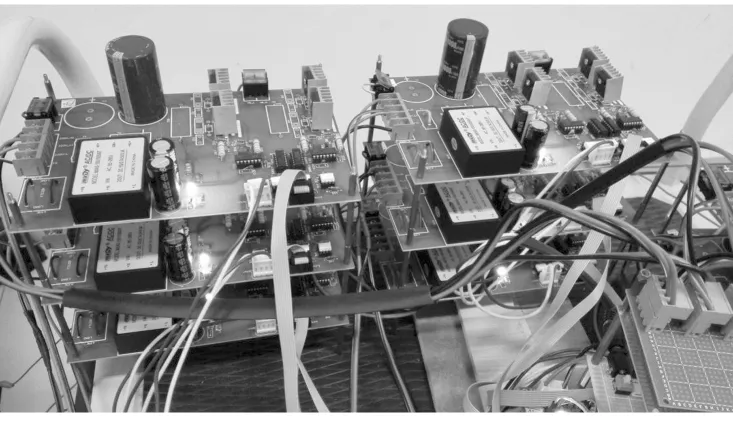
(b) 整个实验验证平台实物图

时间/(5 ms·格-1)

时间/(5 ms·格-1)
6 相关的几点讨论
6.1多电平SVPWM算法实现总运算量统计
表8给出了由表1-表7统计获得的在一个采样周期内不同坐标系中的多电平SVPWM算法实现总运算量统计.

表8 不同坐标系下的多电平SVPWM算法实现总运算量
从表1至表8中可以得出如下结论:
1)由表1可以得出:对于不同坐标系下的参考矢量形成环节,4种不同坐标系下的计算量差异不大.对于运算速度已经非常快的主流处理器芯片(如浮点型DSP),这一环节的计算量差异造成的算法执行的时间差异可以忽略不计;
2)由表2至表4可以得出:对于不同坐标系下的矢量定位及合成矢量选择环节, 由于45°和60°坐标系下预先进行了矢量坐标整数化处理和采取更为简便的扇区判别算法,因此,在这一环节的实现中,45°和60°坐标系相比于αβ坐标系具有明显速度优势.abc坐标中需要判定相关面与单位立方体的空间位置来选择4个矢量,这使得在这一环节的实现中,较45°和60°坐标系慢.
3)由表5至表7可以得出:对于不同矢量作用时间计算环节,αβ,45°和60°坐标系下只需要计算3个矢量作用时间,而在abc坐标系下需要计算4个矢量作用时间.因此,在αβ,45°和60°坐标系下的不同矢量作用时间计算量相同,较abc坐标系优.
4)从表8可以得出:在理论上,对于一个控制周期内不同坐标系下的多电平SVPWM算法实现计算量而言,45°和60°坐标系最优,abc坐标系其次,αβ坐标系最差.但在实际算法实现过程中,发现45°和60°坐标系在算法具体实现过程所表现出来的优势并无理论分析中那样明显,关于这一问题讨论将在6.3节展开.
6.2同多电平SVPWM算法实现速度实验结果对比分析
为测试不同算法实现的在实际运行环境中的执行速度,本文采用了在执行多电平SVPWM开始时产生一个上升沿,待算法结束时产生一个下降沿,通过测量脉冲的宽度来判断算法执行时间(图5给出了abc坐标系下算法的时间测量图).
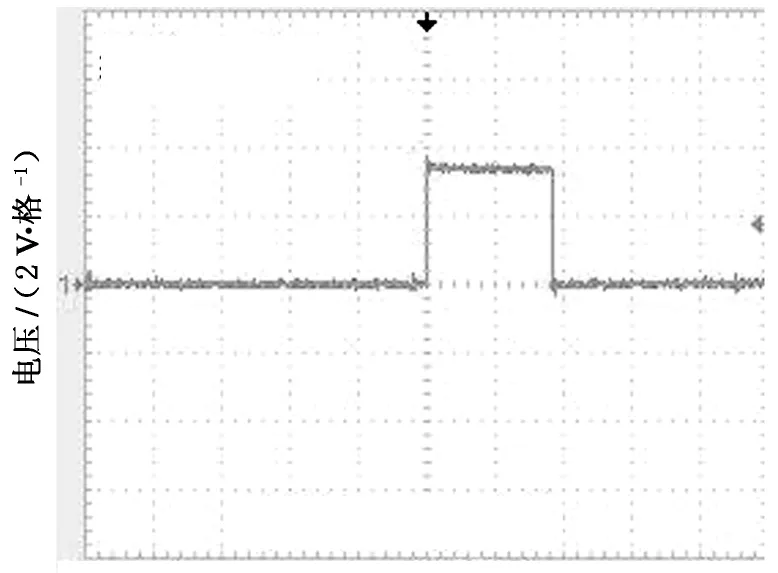
时间/(2.5 μs·格-1)
表9为不同坐标系下单次执行多电平SVPWM算法消耗的时间表.
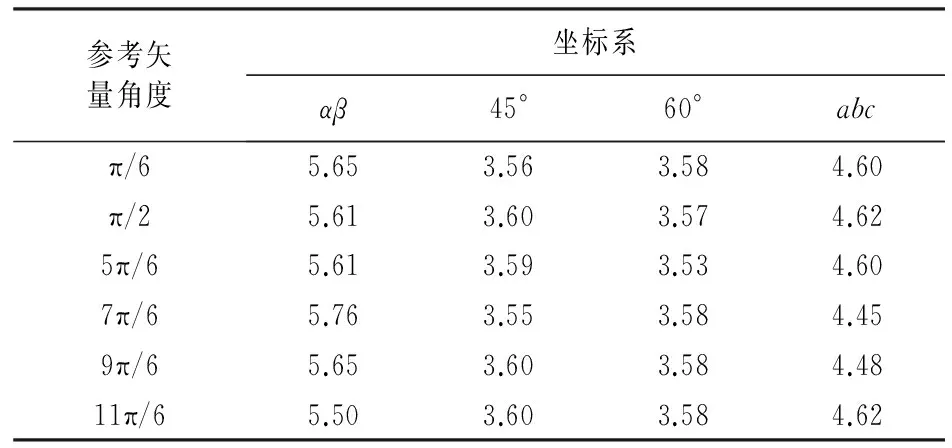
表9 不同坐标系下单次执行多电平SVPWM算法消耗的时间
注:表中的执行时间包含了必要的中间变量的时间开销.
从表9可以得出以下结论:
1)无论何种坐标系下,参考矢量的角度对算法执行速度基本无影响.
2)多电平SVPWM算法在45°和60°坐标系下的实现时间最短,且基本相同(表9中的误差主要是由于示波器的测量精度造成),在abc坐标系下的实现时间居中,在αβ坐标系下实现时间最长,这与表8的分析结果是一致的.但45°和60°坐标系在算法具体实现过程所表现出来的优势并无理论分析中那样明显,这是由于在SVPWM信号输出环节需要将αβ,45°和60°坐标系下二维坐标转换到三相开关状态需要执行一个额外的转换程序(主要由一些条件判断语句、移位运算和加减法构成),转换程序执行时间约0.7 μs,减去这一转换程序执行时间,就可发现实验结果与表8所得到的理论分析结论是相符合的,这就从实验的角度证明了本文理论分析的正确性.
3)由于实验过程中的DSP为浮点型DSP,如果采用整点型DSP来执行多电平SVPWM算法,45°坐标系应比60°坐标系更具有速度优势,这是因为在45°坐标系下相邻矢量之间的坐标增量绝对值都等于1(在60°坐标系中坐标间的坐标增量为一小数),在矢量选择过程中,45°坐标系进行扇区判断时采用直线的斜率为1(60°坐标系下该直线的斜率同样为小数).
4)综合上述结论并考虑到在45°坐标系下,矢量的物理意义更清晰、矢量的坐标呈现严格的整数化且相邻矢量的坐标增量绝对值都等于1,非常适合按照某些约束条件进行多电平电路特性优化控制[15-17].因此,推荐在多电平SVPWM实施过程中优先采用45°坐标系.
7 结 论
本文在对αβ,45°,60°和abc坐标系下实现多电平SVPWM算法的各个环节(包括参考矢量形成、参考矢量定位及合成矢量选择和不同矢量作用时间计算环节)所需计算量(包括四则运算、条件判断、逻辑运算、数据存储和数据类型转换等计算类型)进行了详细分析.通过分析得出了在45°和60°坐标系下实现多电平SVPWM算法所用时间最短,在abc坐标系下实现算法时间次之,在abc坐标系下实现算法时间最长这一结论.考虑在45°坐标系下多电平矢量坐标为整数和其在多电平电路特性优化控制中的独特优势,推荐在多电平SVPWM算法实施过程中优先采用45°坐标系.
[1]李永东,肖曦,高跃. 大容量多电平变换器-原理.控制.应用[M]. 北京:科学出版社,2005:5-10.
LI Yong-dong,XIAO Xi,GAO Yue. Large capacity multilevel converter- principle.control.application[M].Beijing:Science Press,2005:5-10.(In Chinese)
[2]RODRIGUEZ J,LAI J S,PENG F Z.Multilevel inverters: a survey of topologies, controls and applications[J].IEEE Transactions on Industrial Electronics,2002,49(2):724-738.
[3]MALINOWSKI M,GOPAKUMAR K,RODRIGUEZ J,etal.A survey on cascaded multilevel inverters[J].IEEE Transactions on Industrial Electronics,2010,57(7):2197-2206.
[4]SEO J H,CHOI C H,HYUM D S.A new simplified space-vector PWM method for three-level inverters[J].IEEE Transactions on Power Electronics,2001,16(4):545-550.
[5]JOSE R,LUIS M,PABLO C,etal.A high-performance vector control of an 11-level inverter[J].IEEE Transactions on Industrial Electronics, 2003,50(1):80-85.
[6]宋强,刘文华,严干贵,等.多电平逆变器的通用空间矢量调制算法[J]. 清华大学学报:自然科学版,2004,44(7):888-892.
SONG Qiang,LIU Wen-hua, YAN Gan-gui,etal.Universal space vector modulation algorithm for multilevel inverters[J]. Journal of Tsinghua University:Science and Technology,2004,44(7):888-892.(In Chinese)
[7]GUPTA A,KHAMBADKONE A. A space vector PWM scheme for multilevel inverters based on two-level space vector PWM[J].IEEE Transactions on Industrial Electronics,2006,53(5):1631-1639.
[8]CELANOVIC N,BOROYEVICH D.A fast space-vector modulation algorithm for multilevel three-phase converters[J].IEEE Transactions on Industry Applications,2001,37(2):637-641.
[9]唐雄民,龚理专,彭永进.一种快速的多电平空间矢量调制算法研究[J].高电压技术,2006,32(2):75-77.
TANG Xiong-min, GONG Li-zhuan, PENG Yong-jin.New fast algorithm for vector control of multilevel inverter[J].High Voltage Engineering, 2006,32(2):75-77.(In Chinese)
[10]LEON J I,VAZQUEZ S,PORTILLO R,etal.Three-dimensional feedforward space vector modulation applied to multilevel diode-clamped converters[J].IEEE Transactions on Industrial Electronics,2009,56(1):101-109.
[11]RENGE M M,SURYAWANSHI M H.Three-dimensional space-vector modulation to reduce common-mode voltage for multilevel inverter [J]. IEEE Transactions on Industrial Electronics,2010,57(7):2324-2331.
[12]YI DENG,TEO K H,DUAN C J,etal.A fast and generalized space vector modulation scheme for multilevel inverters [J]. IEEE Transactions on Power Electronics,2014,29(10):5204-5217.
[13]崔楠楠,吴斌,徐欢庆.一种多电平逆变器简化SVPWM算法[J]. 电气传动,2015,45(3): 45-47.
CUI Nan-nan, WU Bin, XU Huan-qing. Simplified SVPWM algorithm for multilevel inverter[J]. Electric Drive,2015,45(3):45-47.(In Chinese)
[14]林渭勋.现代电力电子技术[M].北京:机械工业出版社,2006:230-240.
LIN Wei-xun.Modern power electronics technology[M].Beijing:China Machine Press,2006:230-240.(In Chinese)
[15]刘铮, 王翠, 彭永进, 等. 级联多电平逆变器空间矢量调制算法零序电压分布及优化算法[J].电工技术学报,2008,23(12): 92-98.
LIU Zheng,WANG Cui, PENG Yong-jin,etal. Zero order voltage distribution and optimized algorithm of svpwm methoc for multi-level cascaded inverter[J]. Transactions of China Electrotechnical Society, 2008, 23(12): 92-98. (In Chinese)
[16]王翠,孟志强.N级逆变器空间矢量调制的开关频率优化算法[J]. 中国电机工程学报,2011,31(36):46-52.
WANG Cui, MENG Zhi-qiang. An optimal algorithm on switching frequency of space vector modulation for N-cell inverter[J]. Proceeding of the CSEE, 2011, 31(36): 46-52. (In Chinese)
[17]王翠,孟志强.三级七电平逆变器混合调制算法优化零序电压[J].电工技术学报,2013,28(11):209-215.
WANG Cui,MENG Zhi-qiang.An optimal hybrid algorithm on zero order voltage for 3-cell 7-level inverters[J].Transactions of China Electrotechnical Society,2013,28(11):209-215.(In Chinese)
Research on Rapidity Analysis of Multilevel SVPWM Algorithm in Four Coordinates
TANG Xiong-min1†,FENG Qiang-jian1,MENG Zhi-qiang2,WANG Cui1,ZHANG Miao1,CHEN Si-zhe1
(1.School of Automation,Guangdong Univ of Technology, Guangzhou,Guangdong510006,China;2.College of Electrical and Information Engineering, Hunan Univ, Changsha,Hunan410082,China)
The realization of SVPWM rapidly is a key issue in expanding the application of multilevel converter. To solve this problem, different multilevel SVPWM algorithms based on different coordinates were studied. But there was no comparison analysis report on the speed of these algorithms. For this purpose, a rapidity analysis of 4 typical multilevel SVPWM algorithms in different coordinates was researched. Theoretical analysis and experiment results have shown that the multilevel SVPWM algorithm in 45° coordinate has fewer calculations and is suitable for optimal control. So the multilevel SVPWM in 45°coordinate is recommended.
multilevel; PWM; different coordinates; fast algorithms
1674-2974(2016)08-0101-07
2015-07-02
国家自然科学基金资助项目(51207026,51307025),National Natural Science Foundation of China(51207026,51307025);广东省自然科学基金资助项目(2015A030313487)
唐雄民(1977-),男,湖南祁阳人,广东工业大学副教授,博士†通讯联系人,E-mail:tangxiongmin@126.com
TM464
A
