CVT插电式混合动力汽车经济性控制策略*
2016-09-09周云山贾杰锋李航洋
周云山,贾杰锋,李航洋,张 军
(湖南大学 汽车电子与控制技术教育部工程研究中心,湖南 长沙 410082)
CVT插电式混合动力汽车经济性控制策略*
周云山,贾杰锋†,李航洋,张军
(湖南大学 汽车电子与控制技术教育部工程研究中心,湖南 长沙410082)
针对搭载CVT的插电式混合动力轿车,设计了一种基于动力源外特性曲线和驾驶员踏板操作信号的需求转矩解析方法,在此基础上提出驱动和制动工况下基于瞬时经济性成本最低的能量管理策略,该策略以需求转矩、车速和电池SOC为状态变量,以发动机节气门开度、电机转矩、CVT速比为控制变量.进一步研究了电量消耗阶段有无发动机单独驱动模式对整车能耗经济性的影响.通过自行搭建的前向模型进行仿真,结果表明,电量消耗阶段无发动机单独驱动模式的控制策略具有更强的综合性经济优势.
能量管理;插电式混合动力汽车;无级变速器;控制策略
插电式混合动力汽车(Plug-in Hybrid Electric Vehicle,PHEV)以其续驶里程长、排放低的显著优势,被认为是最具发展前景的电动汽车之一.金属带式无级变速器(Continuously Variable Transm-ission,CVT)以其传动比连续可调的特性,可有效改善动力源的负荷.如何实现动力源特性与CVT特性的完美结合,是CVT插电式混合动力汽车控制策略的核心问题.
CVT插电式混合动力系统控制策略的关键在于转矩分配和换挡规律,两者具有耦合效应[1-2].目前国内外完全针对搭载CVT的PHEV研究成果不多,文献[3]提出了逻辑门限与瞬时优化相结合的控制策略,但其根据车速和加速度进行转矩分配和换挡规律研究,没有考虑驾驶员的操作意图.对于CVT普通混合动力汽车或其他PHEV车型的控制策略,国内外研究比较深入[4-5],具有借鉴意义.文献[6]提出了一种驱动工况下系统总效率最高的CVT混合动力能量优化策略,其前提是采用“9点定义法”进行驾驶意图识别,获取需求转矩.文献[7]分别对纯电动+电量维持(charge sustaining,CS)、电量消耗(charge depleting,CD)+CS、纯电动+CD+CS 3种组合型控制策略进行对比研究.文献[8]提出基于最佳电能的控制策略,在可预知行程时提高整车燃油经济性.文献[9]对插电式混合动力客车CD阶段控制策略进行研究,并对策略中的关键参数进行优化.
本文设计了一种驾驶员需求转矩解析方法,在该需求转矩、当前车速和电池组SOC值下,分别制定驱动和制动工况下的能量管理策略,以瞬时经济性成本最低为目标,对不同工作模式下的转矩分配和CVT换挡规律进行寻优.同时研究了驱动工况下CD阶段中有无发动机单独驱动模式对整车经济性的影响.
1 整车结构及参数
本文的研究对象为装备ISG电机和CVT的前驱单轴并联式PHEV,整车主要部件参数如表1所示.
2 驾驶员需求转矩解析
驾驶员需求转矩解析,即将驾驶员对加速踏板或制动踏板的操作信号转换为需求转矩,是实现混合动力转矩分配和制定换挡规律的前提.本文将驾驶员需求转矩定义为作用在驱动轮上的需求转矩.
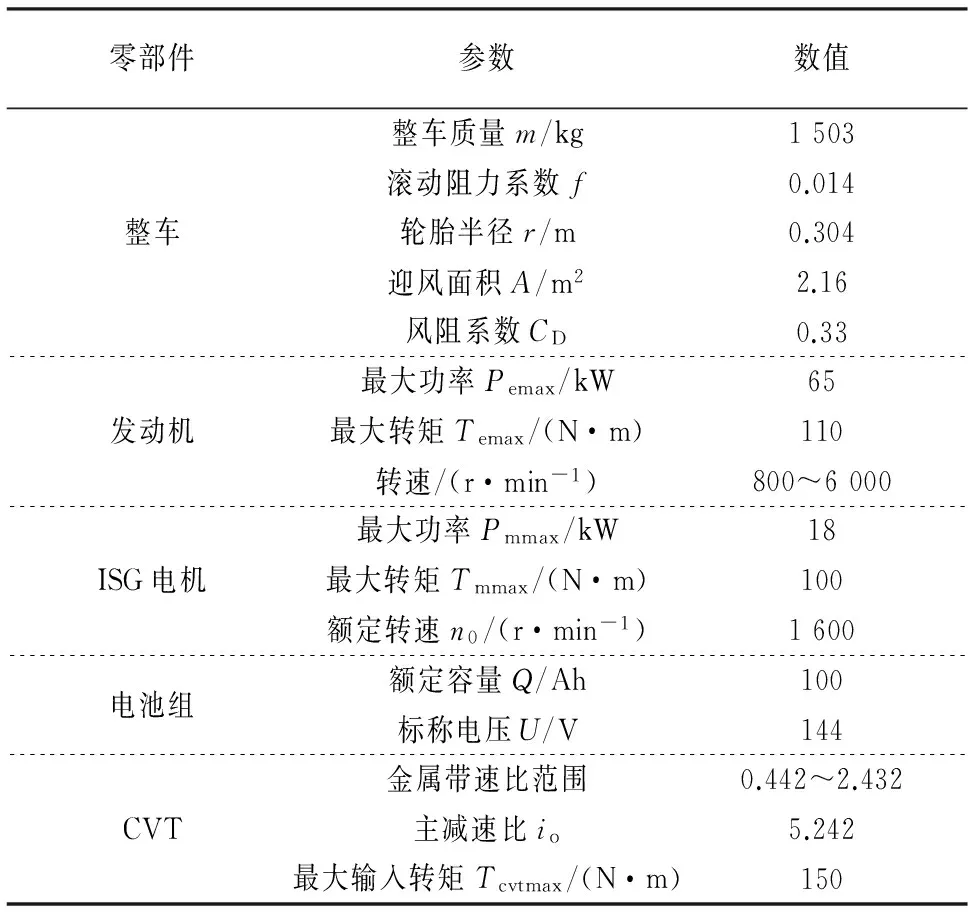
表1 整车主要部件参数
2.1动力源外特性曲线
PHEV动力源所能输出到驱动轮上的最大转矩取决于发动机和ISG电机的外特性、车速和CVT速比,同时还受到CVT最大输入转矩的限制.作出不同速比下发动机和电机共同驱动时(转速低于800 r·min-1时电机单独驱动)输出到驱动轮上的最大转矩曲线,这些曲线的包络线即为动力源外特性曲线,如图1所示.
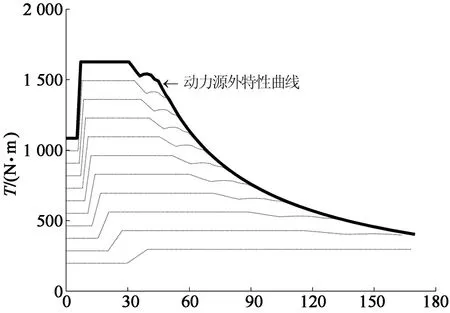
u/(km·h-1)
2.2需求转矩的计算
在某一车速下,驾驶员需求转矩仅与加速踏板(或制动踏板)的开度及其变化率有关.用β表示踏板开度,β>0时代表加速踏板开度,β<0时代表制动踏板开度,β=0时代表未踩踏板.
驱动工况下,驾驶员需求转矩为:
Treq=Tmin+(Tmax-Tmin)β+Tmod,0≤β≤1.
(1)
式中:Treq为驾驶员需求转矩;Tmax为当前车速下动力源外特性曲线上的对应转矩;Tmin为驾驶员未踩踏板时的需求转矩,随车速的升高而降低,车速较低时为正,车速较高时为负,其值根据试验和工程经验而定;Tmod为修正转矩,与车速、加速踏板开度及其变化率有关.Tmin,Tmod取值分别如下:
(2)
Tmod=TmaxβΔf,
(3)
(4)

在给定某一车速(60 km/h)时,不同加速踏板开度变化率下需求转矩与加速踏板开度的关系曲线如图2所示.由图2可知,在车速和加速踏板开度变化率一定时,需求转矩与加速踏板开度呈线性递增关系,由公式(1)所决定;但在车速和加速踏板开度一定时,需求转矩与加速踏板开度变化率之间呈非线性关系.

β/%
制动工况下,驾驶员需求转矩为:
Treq=Tmin+Tbmaxβ,-1≤β<0.
(5)
式中:Tbmax为制动器和再生制动所能提供的最大制动力矩.
3 能量管理策略
设计中的整车控制策略总体结构如图3所示.其中,能量管理策略分为驱动和制动2种工况,下文分开介绍.常规能量管理策略根据转矩分配得到发动机目标转矩,然后计算出节气门开度,本文研究可直接得到发动机目标节气门开度.

图3 控制策略总体结构
3.1驱动工况下的控制策略
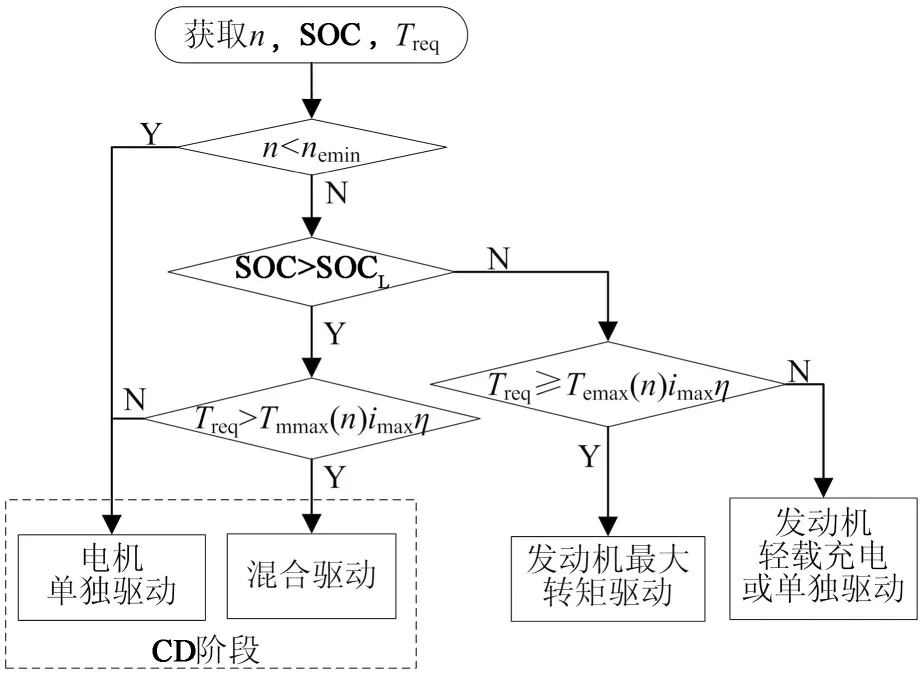
插电式混合动力汽车的电池组具有较高的容量,电池组中大部分电能来自外界电网.当电池组SOC大于下限值SOCL时,为CD阶段;当SOC达到下限值SOCL时,进入CS阶段.为研究驱动工况下CD阶段中有无发动机单独驱动模式对整车经济性的影响,本文给出2种方案,如图4所示.图4中,n为ISG电机(或发动机)转速;nemin为发动机最低工作转速;Tmmax(n),Temax(n)分别为当前转速下电机、发动机的最大输出转矩;Teoff(n)为当前转速下发动机关闭的转矩下限值;imax为传动系的最大传动比;η为传动系的传动效率,取85%.
(a) CD阶段无发动机单独驱动

(b) CD阶段有发动机单独驱动
从图4可以看出,第1种方案中,CD阶段电机必须参与驱动,发动机起辅助驱动的作用,仅在需求转矩较大时参与混合驱动模式,虽然此时发动机可能运行在低效区,但由于输出能量较低,油耗也相对较低[10].第2种方案中,CD阶段以发动机驱动为主,电机起辅助驱动作用,需求转矩较低时电机单独驱动.当SOC小于下限值时,两种方案的策略相同,只有发动机参与驱动,需求转矩较小时,根据经济性寻优,决定发动机处于轻载充电还是单独驱动模式;需求转矩过大时,为了防止电池组过度放电,仅让发动机输出最大转矩进行驱动.根据SOC值的大小,下面对各驱动模式下的转矩分配和CVT速比确定策略进行介绍.
3.1.1SOC>SOCL时的控制策略
在确定驱动模式后,关键问题是:在已知驾驶员需求转矩、车速、电池组SOC的情况下,如何确定发动机目标节气门开度αobj,电机目标转矩Tmobj和CVT目标速比iobj.本研究以整车瞬时经济性代价最小为目标,通过优化算法离线寻优,分别制成目标值MAP表,实时控制过程中只要根据需求转矩、车速、SOC进行在线查表,便可得到αobj,Tmobj和iobj.
以混合驱动模式为例,建立瞬时经济性代价目标函数如下:

(6)
式中:C为当前时刻燃油消耗和电能消耗成本之和,元/s;jf为汽油的价格,元/L;Pe为当前时刻发动机输出功率,kW;be为燃油消耗率,g/(kW·h);ρ为汽油的密度,取0.725 g/mL;je为电的价格,元/度;Pm为当前时刻电机输出功率,kW;ηm为电机的效率,由电机转矩和转速查表可得;ηb为电池的充放电效率,由SOC和放电功率查表可得;ηg为电网的充电效率,取98%.因此,目标C是发动机节气门开度α,电机转矩Tm和CVT速比icvt的函数.
约束条件如下:
(7)
式中:Tcvt_in为CVT输入端的转矩;Pbmax为电池组最大充放电功率.
该模式下能量管理优化的实质是:给定需求转矩、车速、SOC的前提下,在约束条件范围内,寻找使系统瞬时经济性代价最小的发动机气门开度、电机转矩和CVT速比.采用自行设计的优化算法进行离线求解,具体过程如图5所示.该算法在枚举法的基础上加入了约束筛选和最优值更新的功能,可高效计算出给定任何一组需求转矩、车速、SOC情况下的最优节气门开度、电机转矩和CVT速比,即αobj,Tmobj和iobj.
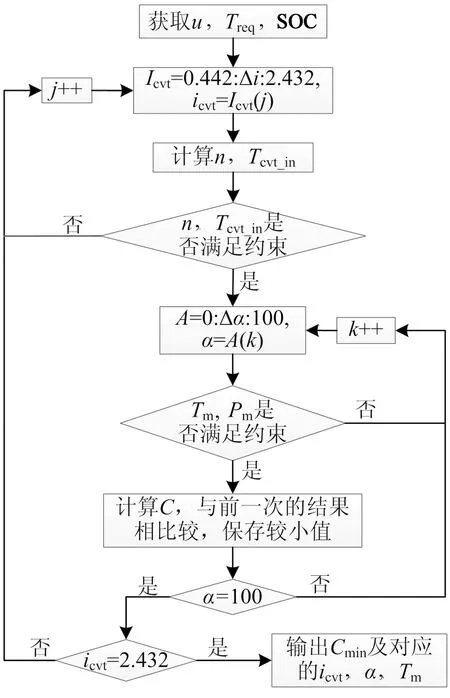
图5 优化算法流程
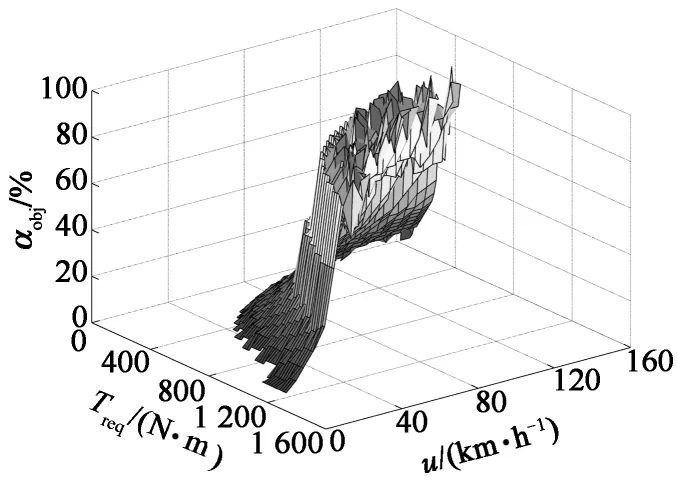
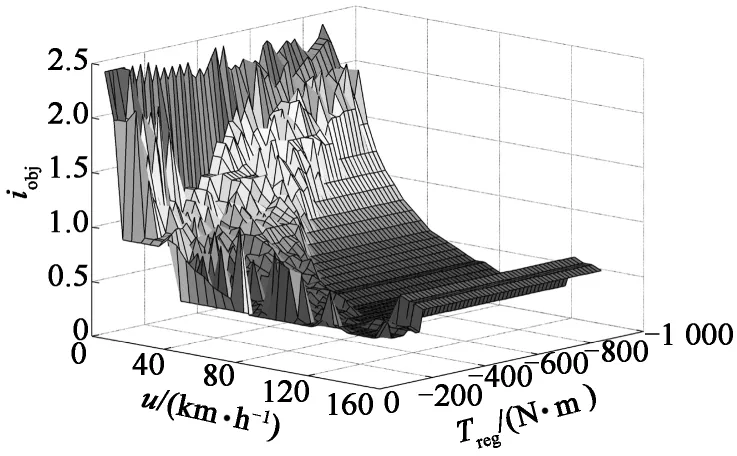
将所有Treq,u,SOC值下的αobj和iobj汇制成三维MAP表,图6给出了SOC=0.5时目标值.电机目标转矩Tmobj为:

(8)
分别令式(6)中的Pe,Pm均为0,便可优化得到发动机单独驱动、电机单独驱动模式的CVT换挡规律,鉴于篇幅原因,文中未予一一列出.
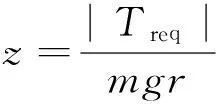
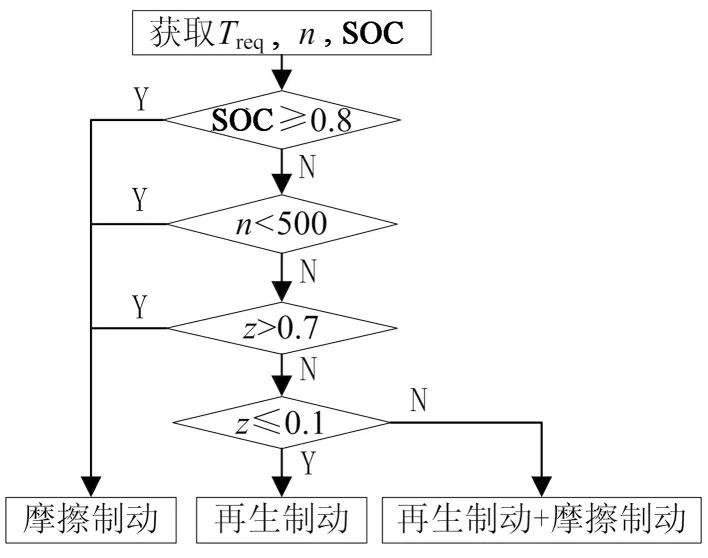
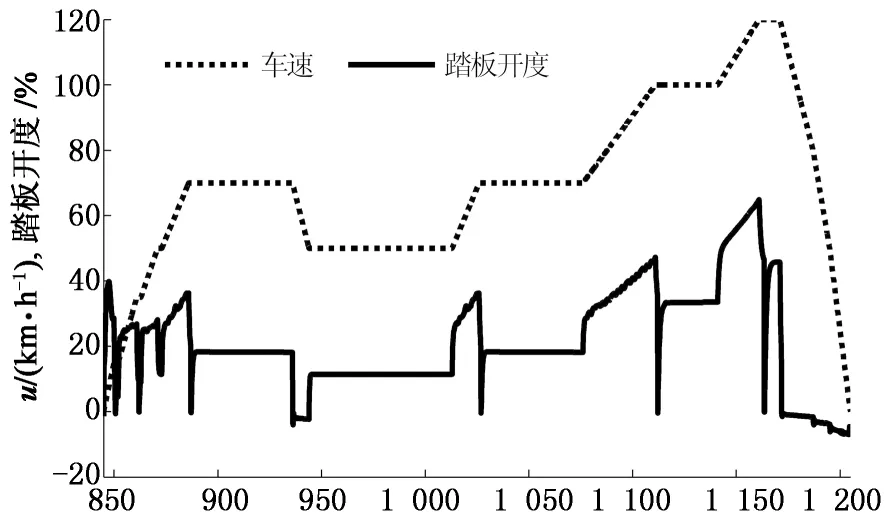
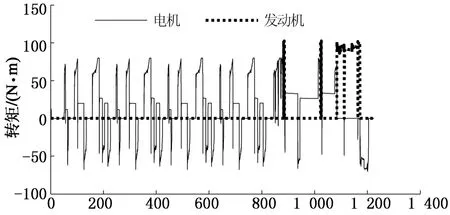
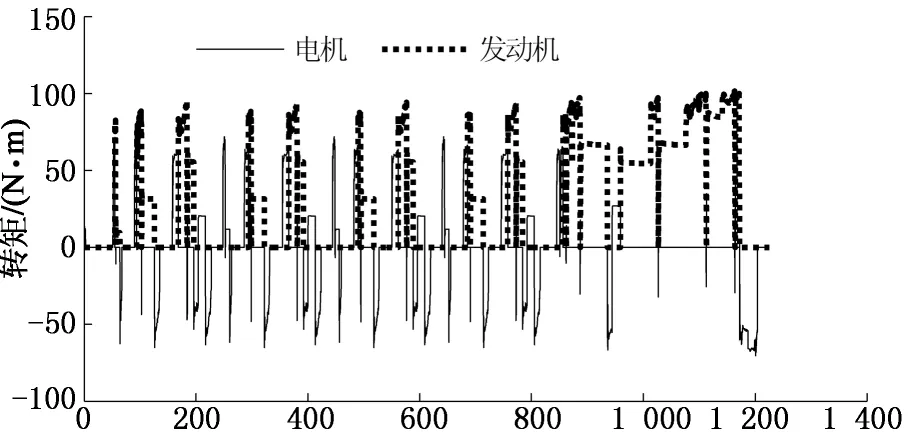
3.1.2SOC 1)当Treq (9) 式中:Pm取值为非正数,当Pm<0时,发动机处于轻载充电模式,当Pm=0时,发动机为单独驱动模式. 图7给出了优化后的目标值结果(当SOC=0.25时).从图7(c)可以看到,当需求转矩较小时,发动机运行在轻载充电模式,但此时提供给电机的充电转矩都不大,这是由瞬时经济性最优的本质所决定的. (b) 目标节气门开度 2)当Treq≥Temax(n)imaxη时,由于电池组电量不足,发动机输出最大转矩进行驱动,即 Tm=0, (10) αobj=αmax(n), (11) iobj=2.432. (12) 式中:αmax(n)为当前转速下使发动机输出最大转矩的节气门开度,由台架试验测得. 3.2制动工况下的控制策略 本研究的PHEV采用电机再生制动和制动器摩擦制动两种制动形式.再生制动受到电池组SOC值、电机最低发电转速(500 r·min-1)和制动强度z的限制.制动形式的控制逻辑如图8所示. 制动强度为: (13) CVT插电式混合动力系统在制动工况下控制策略的实质包括3部分:1)前后轴之间的制动力矩分配;2)驱动轮上再生制动力矩与制动器摩擦制动力矩之间的分配;3)在再生制动力矩一定的情况下,如何确定CVT速比和电机转矩,使回收的能量最多,这是控制策略的核心.设计中,前后轴上的制动力矩按固定比值进行分配.下面以再生制动与摩擦制动同时进行的制动工况为例,对控制策略进行说明. (a)CVT目标速比 (b)目标节气门开度 (c)电机目标转矩 图8 制动形式的选择逻辑 当已知需求的制动力矩Treq时,按定比分配可得到驱动轮和从动轮上的制动力矩Tbf,Tbr.从动轮上由制动器提供摩擦制动力矩Tbr.驱动轮上尽量多地采用再生制动,若电机不能完全提供该轴上的制动力矩Tbf,剩余的部分由摩擦制动提供,电机提供的再生制动力矩Treg为: (14) Treg_max=Tmmaximaxη/fs. (15) 式中:Treg_max为电机所能提供的最大再生制动力矩;fs为安全系数,取1.5;Treg和Tbf符号均为负. 确定再生制动力矩Treg后,以回收到电池组中的电能最多为目标,对电机发电转矩进行寻优.目标函数为: C=Pmηmηb. (16) 优化后的CVT目标速比值(SOC=0.5)如图9所示.其中,电机目标转矩Tmobj为: (17) 图9 再生制动时的CVT目标速比 为了对比和验证所制定控制策略的效果,在Matlab/simulink环境下搭建CVT插电式混合动力汽车前向仿真模型.分别将初始SOC值设为0.7和0.25,对两种方案下的控制策略各进行一个NEDC循环工况的仿真.图10是在时间为845~1 205 s内车速与踏板开度的仿真结果(踏板开度为负表示制动).CD和CS阶段下发动机、电机工作转矩的仿真结果分别如图11和图12所示. t/s t/s t/s 从图11可以看出,前期由于需求转矩不大,2种控制策略都采用电机单独驱动,后期需求转矩较大时,第1种控制策略(CD阶段无发动机单独驱动模式)采用混合驱动,第2种采用发动机单独驱动.从图12可以看出,由于进入了CS阶段,发动机开始频繁参与驱动,第1种控制策略下发动机参与驱动的时间更长. t/s t/s 由于单个NEDC工况路程较短,不能很好地体现控制策略的优越性,故采用12个循环工况进行仿真,SOC值的仿真结果如图13所示,其经济性成本随时间的增长如图14所示. t/s 从图13和图14中可以看出,第1种控制策略由于前期电能参与程度高,更早进入CS阶段,在行驶里程较短时具有很大的经济性优势;在后期行程中,第2种控制策略经济性花费略低,但优势并不明显,两者相差不大,这是因为SOC已达到下限值,进入CS阶段.因此,总体来看,CD阶段无发动机单独驱动的控制策略具有综合性经济优势. t/s 针对CVT插电式混合动力汽车可外接充电和传动比连续变化等特点,设计了一种基于动力源外特性曲线和驾驶员踏板操作信号的需求转矩计算方法,在此基础上制定了驱动和制动工况下的能量管理策略,对不同工作模式下的转矩分配和CVT换挡规律进行优化. 研究了CD阶段有无发动机单独驱动模式对整车的经济性影响.仿真结果表明,CD阶段无发动机单独驱动模式的控制策略在短行程时经济性代价较小,长行程时经济性代价相差不大,故其综合性经济优势更强. [1]CHEN Z, ARDALAN V. Route preview in energy management of plug-in hybrid vehicles[J]. Transactions on Control Systems Technology, 2012, 20(2):546-553. [2]杨伟斌, 陈全世, 田光宇, 等. 插电式混合动力汽车换挡规律及转矩分配策略[J]. 机械工程学报, 2013, 49(14): 91-98. YANG Wei-bin, CHEN Quan-shi, TIAN Guang-yu,etal. Shifting schedule and torque distribution strategy for the Plug-in hybrid electric vehicle[J]. Journal of Mechanical Engineering, 2013, 49(14): 91-98.(In Chinese) [3]秦大同, 杨官龙, 刘永刚, 等. Plug-in并联式单电机混合动力汽车能量管理优化控制策略[J]. 中国公路学报, 2013, 26(5): 170-176. QIN Da-tong, YANG Guan-long, LIU Yong-gang,etal. Energy management optimization control strategy of Plug-in parallel single-motor hybrid electric vehicle[J]. China Journal of Highway and Transport, 2013, 26(5): 170-176.(In Chinese) [4]WIRASINGHA S G, EMADI A. Classification and review of control strategies for Plug-in hybrid electric vehicles[J]. Transactions on Vehicular Technology, 2011, 60(1): 111-122. [5]邓元望, 王兵杰, 张上兵, 等. 基于混沌遗传算法的PHEV能量管理策略优化[J]. 湖南大学学报:自然科学版, 2013, 40(4):42-48. DENG Yuan-wang, WANG Bing-jie, ZHANG Shang-bing,etal. Optimization of energy management strategy of PHEV based on chaos-genetic algorithm[J]. Journal of Hunan University: Natural Sciences, 2013, 40(4):42-48.(In Chinese) [6]郑永霞, 赵峰, 罗禹贡, 等. 装备CVT的中度混合动力轿车驱动工况下的能量优化策略[J]. 汽车工程, 2014, 36(1): 2-6. ZHENG Yong-xia, ZHAO Feng, LUO Yu-gong,etal. Energy optimization strategy for the mild hybrid electric vehicle with CVT under drive conditions[J]. Automotive Engineering, 2014, 36(1): 2-6.(In Chinese) [7]WANG Xi-ming, HE Hong-wen, SUN Feng-chun,etal. Comparative study on different energy management strategies for Plug-in hybrid electric vehicles[J]. Energies,2013(6):5656-5675. [8]罗国鹏, 罗禹贡, 李克强. 基于最佳电能使用的插电式混合动力客车控制策略[J]. 汽车工程, 2012, 34(6): 475-478. LUO Guo-peng, LUO Yu-gong, LI Ke-qiang. Control strategy for Plug-in hybrid electric bus based on optimal electric energy use[J]. Automotive Engineering, 2012, 34(6): 475-478.(In Chinese) [9]倪成群, 赵强, 张幽彤. 插电式混合动力客车电能消耗阶段控制策略的研究[J]. 汽车工程, 2014, 36(1): 12-16. NI Cheng-qun, ZHAO Qiang, ZHANG You-tong. A study on the control strategy for PHEB in energy depletion mode[J]. Automotive Engineering, 2014, 36(1): 12-16.(In Chinese) [10]GONG Qiu-ming, LI Yao-yu, PENG Zhong-ren. Trip-based optimal power management of Plug-in hybrid electric vehicles[J]. Transactions on Vehicular Technology, 2008, 57(6): 3393-3401. Economic Control Strategy for a Plug-in Hybrid Electric Vehicle Equipped with CVT ZHOU Yun-shan, JIA Jie-feng†, LI Hang-yang, ZHANG Jun (Engineering Research Center of Automotive Electronics and Control Technology of Ministry of Education, Hunan Univ, Changsha, Hunan410082, China) An analytic method of demand torque was designed for a plug-in hybrid electric vehicle equipped with continuously variable transmission (CVT), which is based on the external characteristic curve of the power source and the signal from the driver's operation. Then, energy management strategy minimizing instantaneous economic cost under drive and brake condition was proposed, with the demand torque, vehicle speed and state of charge (SOC) of battery as the state variables, and the throttle opening of the engine, motor torque and speed ratio of CVT as the control variables. Further research was carried out on the influence of whether the engine driving alone is allowed at the charge depleting stage on economic cost. Through simulation with self-built forward model, the results have shown that the strategy that does not allow engine driving alone at the charge depleting stage is better in comprehensive economy. energy management; Plug-in Hybrid Electric Vehicle (PHEV); Continuously Variable Transmission(CVT); control strategy 1674-2974(2016)08-0025-07 2015-06-03 国家自然科学基金资助项目(51175156),National Natural Science Foundation of China(51175156);国家高技术研究发展计划(863计划)资助项目(2012AA111710) 周云山(1957-),男,湖南祁东人,湖南大学教授,博士†通讯联系人,E-mail:jiajiefeng@hnu.edu.cn U469.72 A


4 仿真试验与分析


5 结 论
