模型驱动的危机事件快速建模与分析方法
2016-09-07李明浩杨克巍徐建国谭跃进
李明浩, 杨克巍, 徐建国, 谭跃进
(国防科学技术大学信息系统与管理学院, 湖南 长沙 410073)
模型驱动的危机事件快速建模与分析方法
李明浩, 杨克巍, 徐建国, 谭跃进
(国防科学技术大学信息系统与管理学院, 湖南 长沙 410073)
以2015年底俄土战机冲突事件为例,建立了基于模型驱动方法的快速建模与仿真分析框架,为类似军事冲突及争端事件应急判断提供快速建模与决策分析支持。通过场景建模、可执行逻辑分析和可视化仿真技术分别对危机事件进行静态结构建模、动态行为分析以及场景仿真验证。同时,利用具有自主知识产权的支持快速元模型定制的多视图建模工具ModelLink,与第三方分析与仿真工具集成,形成了以ModelLink为输入的跨平台模型自动生成、分析与互操作的分析链路,支持快速参数变更、直观可视化行为调整的敏捷响应。面向俄土战机事件,利用俄土双方及第三方关于事件细节的开源信息,构建了两种基本场景模型,通过对比不同方案的可执行逻辑分析以及仿真过程参数分析结果,校验了双方在事件声明中细节的合理性与真实性,同时支持后续不断补充开源信息后的模型调整与快速结论生成,具有很好的实用性。
危机事件; 模型驱动; 元模型; 快速建模与分析; 可执行模型;STK仿真
0 引 言
2015年11月24日,俄罗斯一架SU24战机在叙利亚和土耳其边境附近完成对叙利亚恐怖分子的轰炸任务后被土耳其两架F16击落。双方对事件的过程各执己见,主要争执的疑点有三:①俄罗斯方面怒斥这次事件是土耳其有意为之,是有预谋有计划的背后捅刀行为;②土耳其宣称俄罗斯战机越境17s,而俄罗斯则举证叙利亚雷达监测结果反证土耳其战机越境40s;③土耳其声称曾在5分钟内进行了10次警告,而俄罗斯飞行员穆拉赫金在答记者问时声称未收到任何警告。
因此,俄土战机事件具有不确定性、系统性和突发性等危机事件的普遍特征,给事件当事双方和国际社会的应急管理与处置提出了挑战。在此情况下,如何设计一种合理的快速建模和仿真分析方法成为危机应急管理领域需要迫切研究的问题[1]。危机事件的建模要求能够描述内部各事件之间的关联模式,而将各事件整合为一个更大的系统又要求能够快速可配置、可追溯地进行建模分析工作[2]。
国际系统工程协会在《系统工程2020愿景》和《系统工程2025愿景》中都极力倡导并推动系统工程从传统基于文档向基于模型的这种全新范式转变和演进。鉴于危机事件的不确定性、系统性和突发性等复杂特征,危机事件应急管理必须有自己的“系统工程”方法。本文将基于模型的系统工程(modelbasedsystemengineering,MBSE)方法应用于危机事件建模与仿真分析[3],提出了一种基于元模型的快速配置建模方法,设计了开放式、可扩展、可定制、可视化的危机事件执行仿真[4-6]与计算实验平台。结合俄土战机事件双方网上公布的资料,详细介绍了MBSE方法用于危机事件的快速建模与分析过程,仿真结果表明,土耳其击落俄罗斯战机是一次有预谋的行为,同时土耳其关于5分钟内10次警告的说法可信度较低。
1 危机事件快速建模与软件架构
1.1快速元模型配置架构
传统应对危机事件的分析方法往往需要使用多种分析工具以及相关的专业建模人员对各自领域模型进行构建[7],建模时间长,数据不一致,分析能力有限,时效性差,而且在事件信息变更时需要相关人员对各自模型进行修改,时间周期长,有可能会错过最佳的决策时间[8-9]。本文对危机事件的分析抽象为系统问题,通过建模、可执行分析、仿真来完成事件场景的概念重现,通过对逻辑问题及主要参数的验证进行事件的分析工作。快速、灵敏性、时效性是处理应急事件的必要条件,要求根据信息的变更迅速做出响应,完成事件方案的快速分析。
本文采用具有自主知识产权的快速建模及数据框架定制工具ModelLink,以元模型思想为牵引,支撑定制灵活可配的元模型模板,快速组建建模语言所需要的元模型及描述方式,支持对不同事件场景的要素建模,所定义的场景交互操作直观,便于决策者直接操作。
ModelLink的内部结构主要由3个部分构成:元模型定制模块、可视化建模模块、数据服务模块。元模型定制模块主要管理元模型实例数据文件及元模型框架文件,ModelLink底层以XML为数据存储文件格式,通过类的序列化与反序列化将数据以对象形式进行管理,同时参考关系数据库的存储方式,将通用数据结构抽象为可扩展的表,支撑了数据结构的灵活定制。可视化建模模块,负责表现层模型与数据层元模型的映射管理,支持模型表现的定制与扩展。数据服务模块包括管理服务、调度服务、映射服务和通知服务。管理服务实现对象化后的实例数据管理;调度服务完成数据在各视图之间的引用与一致性维护;映射服务提供ModelLink模型数据与其他工具平台数据的转换接口;通知服务负责在数据变更时对工具链上所有平台进行通知。
ModelLink是以场景设计、行为设计和主要参数设计为核心,通过灵活的软件架构及可扩展的元模型数据存储结构实现以下各步功能。首先定制建模中的实体元模型、关系元模型以及元模型数据属性结构,其次利用定制好的建模描述语言对各个视图进行建模[10],完成事件场景的设计及主要参数数据的收集工作,搭建起针对该事件的快速分析链路,通过工具的核心数据管理服务,完成数据之间的调度及交互工作,将所收集的数据按照数据交换规范转换给其他可执行及仿真分析工具[11],生成相应的模型,完成分析功能[12-14]。在事件信息发生变更时,只需要对其中的数据参数直接进行调整就可以进行下一方案的分析[15],无需在其他平台中进行重复建模。
1.2模型驱动的软件架构
ModelLink软件工具被用于搭建一个无缝的分析链路,快速衔接数据源与分析功能,通过实现一个具有灵活扩展及重组功能的数据定义与收集框架,以支持快速的数据及模型框架定义,并以各平台底层数据交互规范为基础[16],各分析工具与其连接形成分析任务的完整工具链路。模型的转换及数据一致性与互操作由ModelLink来完成。
面向危机事件中大众所关心的分析点,主要对场景进行可执行逻辑分析、参数约束分析、仿真分析,并且由仿真分析过程驱动可执行逻辑的执行,完成交互式分析与校验,为结果提供科学的分析过程支撑。因此,选择Rhapsody来进行可执行逻辑分析及参数约束分析,其中利用参数图进行参数约束分析优化的功能由Rhapsody与Matlab之间本身存在的调用接口完成。采用STK来进行场景可视化展示及部分参数分析功能,并根据场景中的相应状态对Rhapsody的逻辑执行进行触发,完成相应部分的分析工作。工具链之间的交互关系如图1所示。
Rhapsody是IBM公司为系统工程师及软件开发者提供的可视化开发与建模环境。结合国防体系工程应用开发了诸如DoDAF、MoDAF等模型框架,提供了一个能够不断发现模型错误和纠正错误的过程。Rhapsody工具具有活动图和状态机图的模型执行分析功能,通过活动模型的执行对所构建模型进行调试,在模型构建过程中即可对系统进行可视化分析和模型逻辑准确性验证。
通过场景要素静态结构和离散化的系统行为描述,还不能真正验证事件场景中的某些特定关注点,需要将基于SysML的体系结构模型转换成仿真分析模型。本文采用STK作为系统功能模型连续行为场景可视化分析工具,同时也可以利用Rhapsody的Matlab集成功能对模型中定量的属性、要素等进行约束计算。
STK是具备执行多种环境、多种任务的专业系统分析工具,其借助真实的地球外部空间,可以对飞机、导弹、卫星姿态等逼真模拟,提供分析引擎进行强大的计算分析,支持两个对象之间可见性分析、卫星对地面的覆盖率分析、雷达天线的性能分析等。分析结果可以获得大量有用的数据和实际验证。
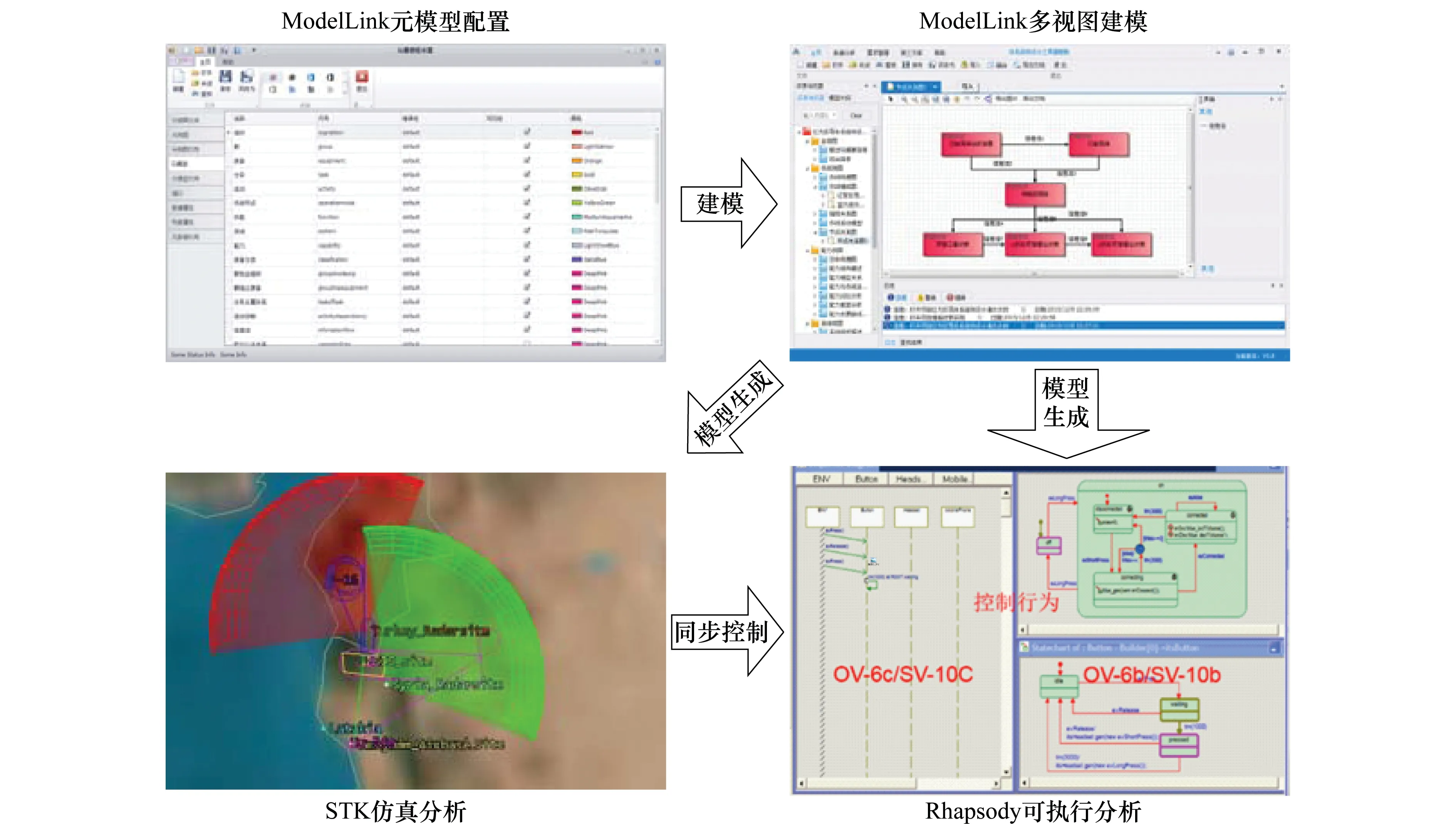
图1 工具链关系图Fig.1 Tool chain relationship diagram
2 应对危机事件快速建模与分析
构建在工具链支撑下的应对危机事件的快速建模与分析框架,如图2所示,从业务视角描述各步骤具体的内容,利用软件工具支撑各部分功能的开展,通过对突发事件进行分析,确定框架输入,获取场景事件信息,理清所关心的分析目的,根据输出的分析结果制定相应决策,并进行多方案的对比。该框架是以灵活可配的元模型建模、异构模型自动生成及跨平台模型互操作为核心功能,来保障快速建模与分析的,利用可执行分析、仿真分析去捕获系统的行为特性,来描述系统的交互和模型表现。整个快速建模与分析框架包括3个阶段、5个过程,其中3个阶段是快速元模型定义及场景搭建、可执行逻辑分析、场景仿真分析,而包含的5个主要过程具体为定义场景元模型、场景要素静态结构及行为建模、可执行逻辑分析、场景仿真分析、参数调整及多方案对比。
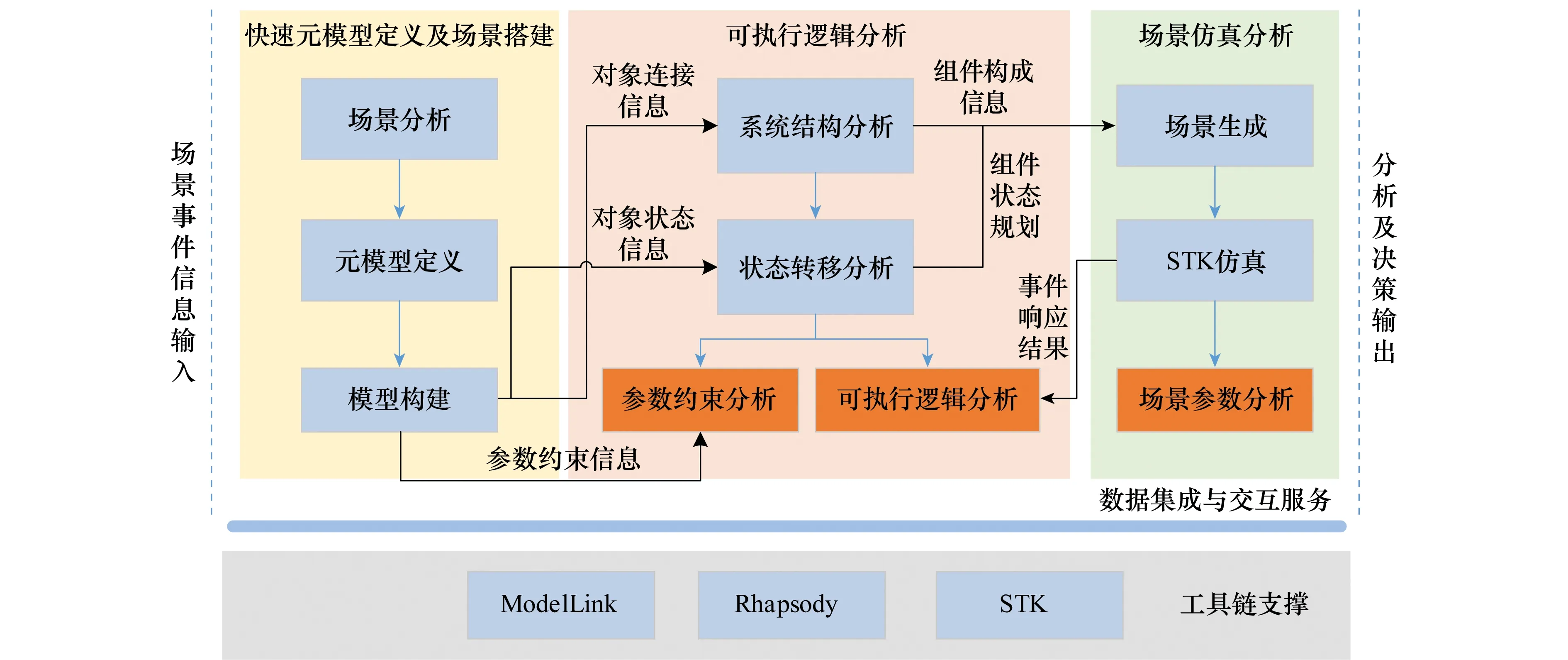
图2 快速建模与分析方法框架Fig.2 Framework for rapid modeling and analysis method
2.1定义场景元模型
根据事件场景中的具体情况以及所关注的焦点,提取场景中所涉及的核心要素及核心要素之间的关系,分析要素的主要参数构成,利用ModelLink的元模型定制工具定义元模型的数据结构以及视图的描述方式,根据Rhapsody软件模型表现的需要,定义执行者、状态、约束等几种基础元模型,以及场景分析所需要的专用元模型。
2.2场景要素静态结构及行为建模
静态结构和行为是描述一个事件的核心要素,通过对要素之间动态交互关系的捕获及描述,可以重现事件特征,帮助用户分析事件过程中的行为逻辑信息。这里采用SysML系统建模语言中的类图来描述静态结构,采用状态图来描述每个对象的具体状态转移过程,这部分的建模工作在ModelLink中通过配置好的元模型及建模描述方式完成,同时在类图中类的属性信息及状态转移中状态的属性信息进行填充,以支持Rhapsody和STK模型的生成。
2.3可执行逻辑分析
在此基础上,利用Rhapsody完成可执行逻辑分析及参数约束分析。通过前期研发的ModelLink与Rhapsody底层元模型的映射规则及相应的数据操作接口,将Rhapsody软件前端所构建的类图模型和状态图模型以及必要参数转化为Rhapsody软件框架下的模型,状态图是描述系统在某一过程中的状态转移,其描述的也是关键时间点或条件下状态的转移行为。利用Rhapsody的可执行分析功能,根据类图和状态图完成动态时序图的生成。同时在有需求的情况下,利用参数约束关系数据生成参数图,描述系统中对象属性之间的数学关系(例如性能约束),对重点参数进行系统工程分析,包括性能评估、可靠性评估和物理特性评估等。
2.4场景仿真分析
将ModelLink中对于对象属性、对象连接关系、状态属性等利用所开发的数据接口转化为STK中组件的运动轨迹、空间姿态、运行开始时间、结束时间和对象关系等连续性仿真要素,在运行过程中通过场景中对象间的可见性、可探测性、可通信性等因素变化来产生场景数据,从而支持对事件过程的仿真分析。
这里将场景仿真分析中可见性等因素的状态结果作为可执行逻辑分析中状态图状态跳转的触发条件,通过获取可见性开始时间与结束时间,将状态变换的时间点作为触发事件,通过所开发的插件功能,完成STK向Rhapsody可执行功能过程发送消息,告知状态跳转是否执行。以此来完成仿真模型与可执行模型的互操作,互相弥补各自模型的不足。
2.5参数调整及多方案比对
ModelLink作为快速建模与分析框架的前端,因其数据结构灵活、可定制,元模型的属性字段与关联关系可根据具体场景进行定义,以及提供了与Rhapsody和STK良好的数据转换接口,使对于危机事件的快速建模与分析成为可能,通过前端建模便可以实现数据源到分析工具的回路,由于支持跨平台模型的自动生成,所以在参数发生变化时可以通过修改ModelLink中的模型参数实现分析链路的快速响应,支持多方案的快速结果生成。
3 实例分析
3.1场景及元模型描述
2015年11月24日,A国SU24战机被B国F16击落。B国宣称A国战机侵犯领空且5分钟内警告10次无效后才开火,两架战机分别越境1.36km和1.15km,而A国方面坚称SU24战机从未侵犯B国领空。当日C国军方声称B国越境2km在C国境内击落A国战机,严重侵犯了C国主权。随后A国方面派出M-8武装直升机进行救援,成功救出飞行员穆拉赫金。穆拉赫金在记者会上说,他们的战机从未侵犯B国领空。
俄土战机事件的元模型可以分为对象元模型、关系元模型、属性元模型以及属性关系元模型。通过对事件的实例化可以得到危机事件的元模型集合。涉及此次事件的共有12个对象实体,分别是A国两架SU24战机、B国两架F16战机、A国两名飞行员、两架M-8武装直升机、A国K空军基地、C国恐怖分子、C国侦测雷达以及B国侦测雷达,详见表1。其中属性元模型可转换为属性值的设定及属性度量的描述。表2给出了SU24战机的属性及关系元模型列表。
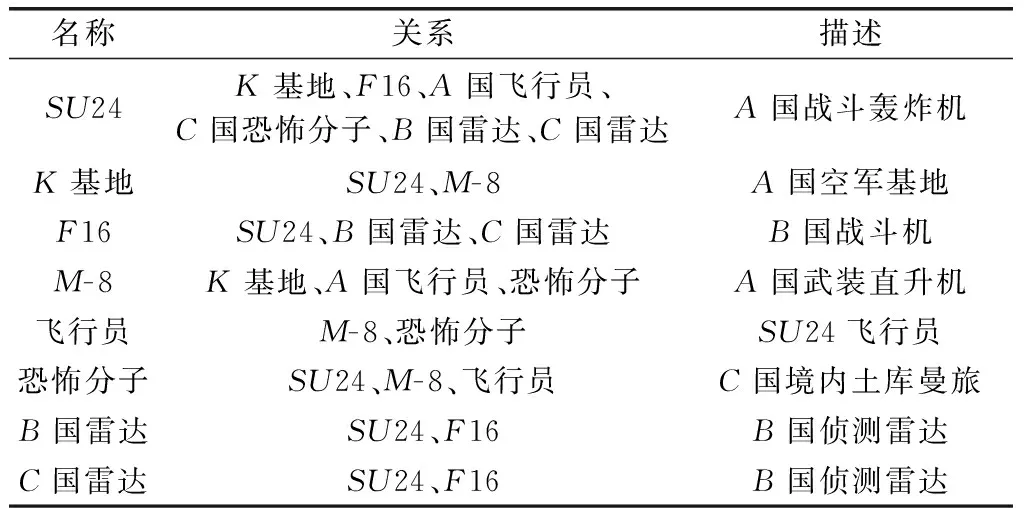
表1 对象及关系元模型列表
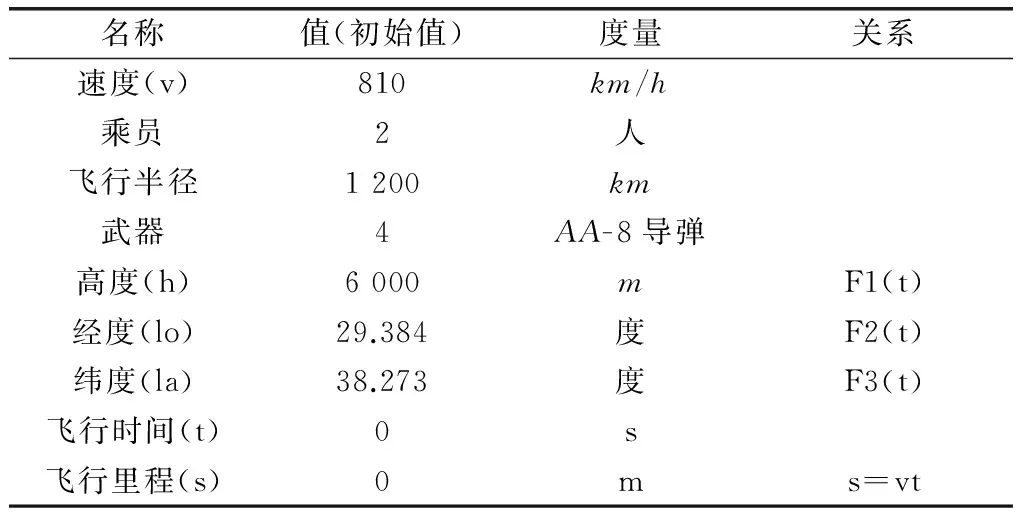
表2 SU24属性及关系元模型列表
3.2事件结构及行为建模
危机事件静态结构和动态行为建模需要抽取核心数据模型中存储的有关对象、关系以及对象的属性、属性关系数据,得到可执行模型的基本结构。借助Rhapsody工具,可以使用对象模型图对事件的静态结构进行建模,使用状态图对事件的动态行为进行建模。建模过程中行为式建模强调输入和输出、序列以及条件以便协调其他行为。在考虑所定义约束的情况下,对等式进行解析以获取属性值的集合。
3.2.1结构建模
对象模型图指定事件系统中类的结构和静态关系。它不仅仅是系统结构的图形表示,而且是建模元素和关系以及元素的接口和特性的描述。可以在对象模型图中设置元素属性的默认值。类与类之间使用关联建立联系,对象与对象使用链接建立联系。如在类A与类B之间绘制了一对多定向关联,可以创建A的一个对象和B的多个对象,通过一个实例化此关联的链接来连接这些对象。
在俄土战机事件中,为更好表示F16对SU24的打击过程,F16及其携带的ARMAAM空空导弹可分解为两类对象,因此共14个对象实体,如图3所示。从左往右分别是K空军基地,实现对A国战场的指控,对战机和直升机下达作战命令并接受战场态势信息、两架执行打击恐怖分子任务的SU24战斗轰炸机,其中一架返航并向指挥中心汇报战场情况、射杀A国飞行员和击落A国武装直升机的C国恐怖分子、执行救援任务的M-8武装直升机,一架返航一架迫降、两名飞行员,一名飞行员被射杀一名飞行员被A国武装直升机救出、执行防空任务的F16战机及携带的ARMAAM空空导弹、C国侦测雷达、B国侦测雷达。对象与对象之间通过事件来触发,比如SU24战机可能有起飞事件、接收轰炸恐怖分子命令事件、收到警告事件、返航事件、受打击事件等。
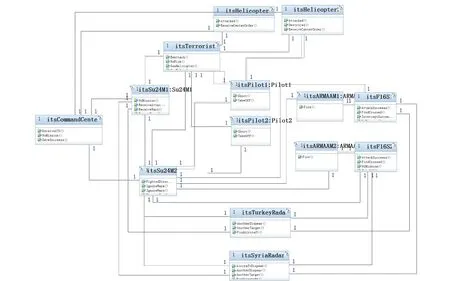
图3 对象模型图Fig.3 Object model diagram
3.2.2行为建模
状态图通过指定对象对事件或操作的反应来定义对象的行为。此反应可以是在状态之间执行过渡,也可以是执行某些动作。状态是对一种方式的抽象,消息触发是从一种状态到另一状态的过渡。消息可以是事件或触发式操作,对象可以同时接收从其他对象发送的这两类消息。实现危机事件的流程分析,核心是建立不同状态之间的转换以及对象与对象之间的事件或触发式操作。事件作为系统中对象所响应的“情况”起源于分析流程。它们的具体实现是信息实体,这些实体包含关于它们所描述事件的数据。
图4给出了SU24、F16、A国飞行员和C国雷达4类对象的状态图。一方面这4类对象状态变换较为复杂;另一方面是事件的疑点主要集中于这4类对象或者是这4类对象可以检测到。SU24的状态跳转过程为其接收到起飞命令后执行正常巡航任务,到达巡航区域20分钟以后,于10时12分接收到基地轰击恐怖分子命令,而后执行轰炸操作,10时16分A国战机完成了第一次轰炸任务,空中掉头进行第二次轰炸,10时24分完成任务准备返航。如果SU24处于越境状态,则可能会收到B国警告命令进入被警告状态,按照B国方面的说法A国战机无视警告最后被击毁,而A国方面则声称未越境且未收到警告,直接被F16击落。
F16的状态跳转过程为收到起飞命令后进行巡航(起飞时间有疑问,根据C国雷达监测结果,F16于9时11分出现在C国雷达监测范围),可能状态跳转为发现俄罗战机越境之后进行警告,警告5分钟无效后发送导弹将其击落,也可能直接发射导弹打击SU24战机。飞行员的跳转过程为与SU24一起执行任务,SU24坠毁后跳伞进入伞降状态,其中一个受到恐怖分子射杀并死亡,另一个等待武装直升机并最终获救。C国雷达跳转过程为正常战备,9时11分观测到B国战机出现,然后发现A国战机出现,执行追踪的整个过程。

图4 状态转移图Fig.4 State transition diagram
3.3逻辑分析与仿真分析
时序图描述事件中的消息交换。通过对可执行模型的构建以及后续的模型运行分析中发现危机事件中的变化、逻辑顺序以及验证各方的观点。同时在有需求的情况下利用参数约束关系数据生成参数图,进行参数分析。
在本危机事件仿真方法中,其中重要一步就是利用STK仿真软件对事件实例进行场景仿真。场景仿真分析中可见性等因素的状态结果作为可执行逻辑分析中状态图状态跳转的触发条件,验证逻辑是否合理。
综合各大网站相关报道,主要有两个阵营的信息,分别是A国和B国,如表3所示。本文中建模所采用的场景关键参数均来源于权威媒体的新闻报道,文章主要利用所提出的方法验证数据的合理性,对于事件本身不提供客观性的结论。
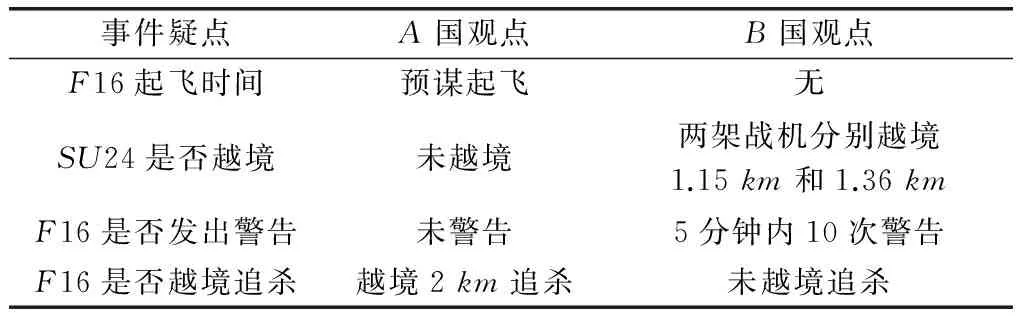
表3 事件疑点列表
3.3.1方案1:基于B国报道的建模分析
B国表示击落俄战机完全符合交战规定。B国F16战机对SU24进行了长达5分钟的警告,警告无效后才将其击落。F16作战过程分为4步:①侦测到A国战机向B国方向飞来以后,F16战机机动前往迎敌。F16机动性能较好,具有快速爬升能力。②发出警告,通过无线电台表明身份,要求A国战机飞离侵犯的领空。③火控雷达锁定,F16雷达能够进行仰视搜索和跟踪以及自动捕获目标。④发射导弹,F16发射的ARMAAM空空导弹有效射程5~7km,为简化分析,假设为6km。
可执行仿真模型建立需要以下几步:
步骤 1事件分析。整个事件过程中STK输入的相关模型对象包括A国SU24战机、M-8武装直升机、K空军基地、以及C国雷达站、B国F16战机、C国IS据点以及B国雷达站。动态模型对象具体属性值如表4所示。

表4 方案1属性设置表
步骤 2结构分析。STK仿真工具是以时间轴为主线,对真实场景进行仿真分析。
步骤 3建立模型。根据上述的流程描述,用STK对此危机事件进行仿真模型的建立,建立的场景如图5所示。

图5 B国观点态势推演图Fig.5 Situation map of viewpoint of Country B
步骤 4模型使用。借助STK仿真软件的运行,并通过更改F-16战机的各项参数指标,从而判断B国F-16战机是否是早有预谋,在空中等待SU24,并将其击落。仿真结果如图6所示。
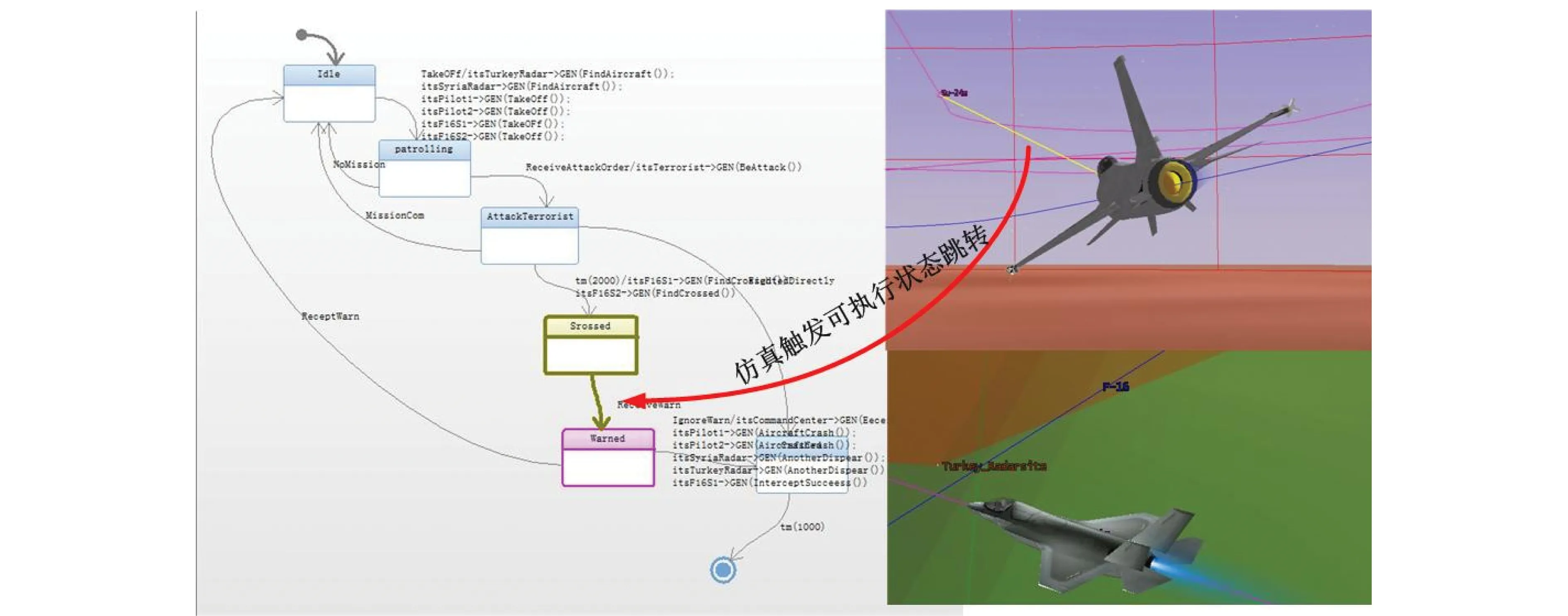
图6 事件仿真触发Fig.6 Event simulation trigger
步骤 5捕获STK状态变换的时间点,触发Rhapsody事件的跳转,实现俄土事件状态跳转以及事件的演化推进。图7给出状态跳转结果,A国SU24战机接收到轰炸恐怖分子命令后进行攻击任务,并被侦测其越境,B国F16战机对其进行警告,警告无效后发射导弹攻击。
3.3.2方案2:基于A国报道的建模分析
A国11月24日晚,首度公开A国SU24战机的路线图,证明俄战机在执行任务时的确没有越界问题。并且根据叙防空部队的客观监测资料,土战机在C国领空停留了40s,深入叙境内2km,而俄战机并未越过B国边界。
被击落的SU24战机于莫斯科时间10时24分完成了对目标的轰炸。随后,其驾驶的飞机被从B国第8空军基地起飞的土空军F-16战机用空对空导弹击中。B国飞机在叙上空发射导弹后,加快转弯,以低于防空部队雷达探测的高度飞离现场。同时,C国赫梅明机场及俄领航飞机的监控设施均未记录到土战机通过之前约定的频率向俄飞行员发出任何警告。
根据以上说明,建立了仿真态势图,如图8所示,可以看出A国飞机从未越境(图中粉红色线条为SU24仿真飞行轨迹)。根据场景仿真结果并对Rhapsody状态进行触发,得到时序图,如图9所示,显示B国未进行任何警告操作。

图7 B国5分钟警告时序图Fig.7 Warning time sequence diagram of Country B in 5 minutes

图8 A国观点态势推演图Fig.8 Situation map of viewpoint of Country A
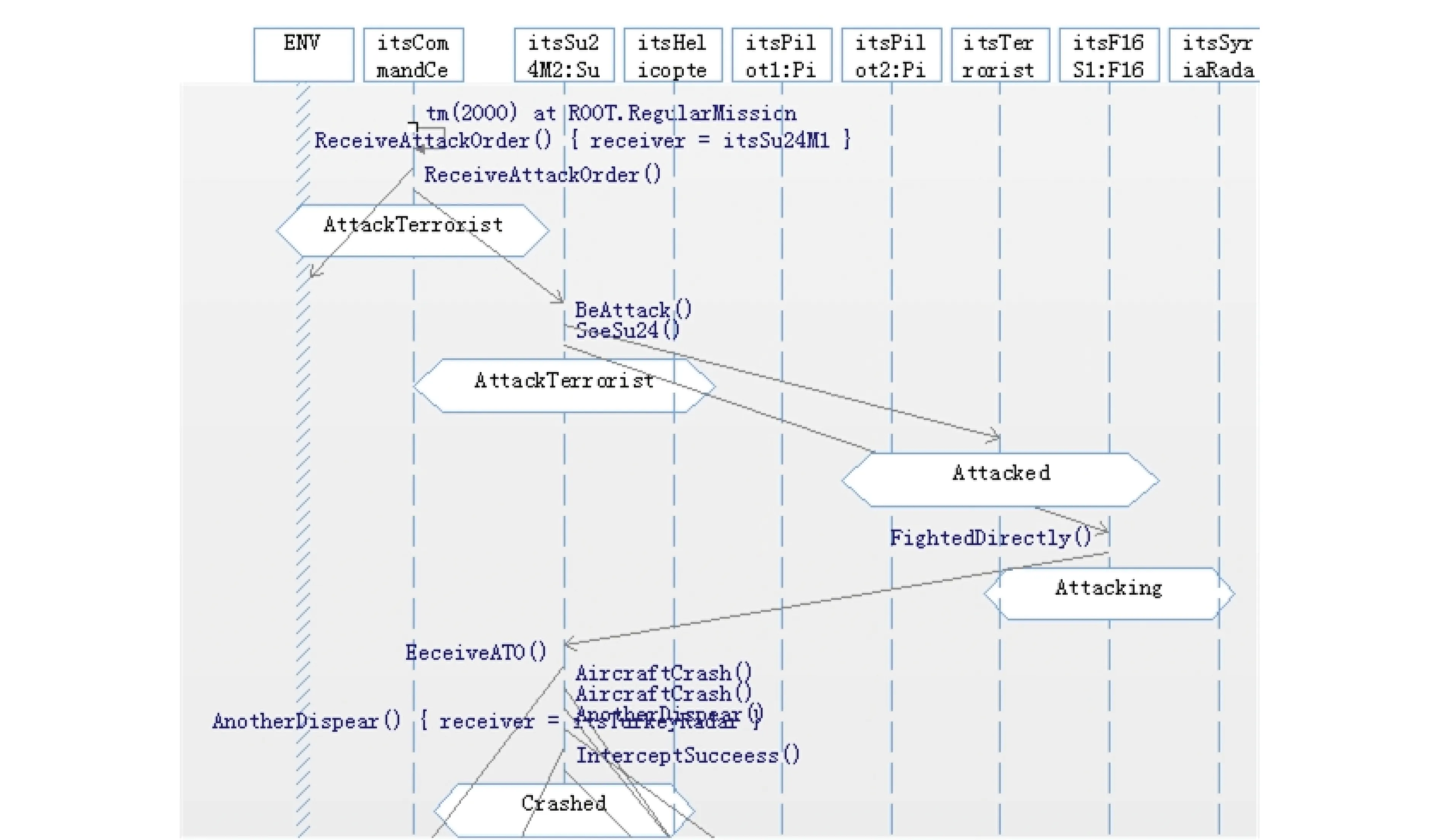
图9 B国直接攻击时序图Fig.9 Direct attack sequence diagram of Country B
3.3.3方案对比分析
通过构建场景模型,并进行可执行分析与仿真分析,可以对上文提出的一些疑问进行验证,得出一些简单的结论。
首先,从构建的两种方案仿真对比(见表5)可知,B国方案中,F16收到任务命令从距离报道攻击位置最近的空军基地起飞,考虑准备起飞时间与距离飞行时间,在俄战机被击毁时,F16战机并不能到达导弹发射区域,因此,执行攻击任务的F16战机应是之前在附近执行巡航任务的战机,而非临时起飞的战机。

表5 场景关键指标仿真结果对比
其次,B国方案中称F16战机在5分钟内对SU24进行了10次警告,并在未越境追杀的情况下将其击毁。仿真模型中根据报道的SU24各时间点的位置,估算被追击时间内的飞行速度,在5分钟时间所完成的飞行距离,可得到F16不可能在不越境的情况下完成最后的攻击任务。
最后,根据B国所公布的雷达图,通过建模生成STK中相应位置参数条件下的越境场景,模拟SU24执行任务中越过土方领空,得出结论由于越境时间极短,不具备越境并被警告,跟踪并完成攻击任务的条件。
4 结 论
本文针对危机事件中涉及的一些逻辑和参数设计问题选择了Rhapsody和STK作为第三方分析工具。ModelLink平台具有灵活性、可敏捷定制的特性以及特有的数据管理服务,因此可以引入更多专业分析工具和基于大数据的网络数据分析技术,形成针对不同特定类型危机事件的快速建模与实时分析链路,驱动敏捷方案生成与计算,对危机事件应急管理具有重要意义。
[1]MengRQ,QiuXG,ZhangLB,etal.Parallelemergencymanagementorientedcomputationexperimentalframe[J].Systems Engineering—Theory & Practice, 2015, 35(10): 2459-2466.(孟荣清, 邱晓刚, 张烙兵, 等. 面向平行应急管理的计算实验框架[J].系统工程理论与实践, 2015, 35(10): 2459-2466.)
[2]LowenCJ,MacdonaldM.Rapidmodel-basedinter-disciplinarydesignofaCubeSatmission[J].Acta Astronautica, 2014, 105(1): 321-332.
[3]InternationalCouncilonSystemsEngineering.Aworldinmotion:systemsengineeringvision2025[R].SanDiego:InternationalCouncilonSystemsEngineering, 2014.
[4]GeBF,HipelKW,YangKW,etal.Adata-centriccapability-focusedapproachforsystem-of-systemsarchitecturemodelingandanalysis[J].System Engineering, 2013, 16(3): 363-377.
[5]ZhanGX,GeBF,LiMH,etal.Adata-centricapproachformodel-basedsystemengineering[J].Journal of System Science and Information, 2015, 3(6): 1-12.
[6]GeBF,HipelKW,YangKW,etal.Anovelexecutablemodelingapproachforsystem-of-systemsarchitecture[J].IEEE Systems Journal, 2014, 8(1): 4-13.
[7]WibbenDR,FurfaroR.Model-basedsystemsengineeringapproachforthedevelopmentofthescienceprocessingandoperationscenteroftheNASAOSIRIS-RExasteroidsamplereturnmission[J].Acta Astronautica, 2015, 115: 147-159.
[8]DaviesJ,MilwardD,WangCW,etal.Formalmodel-drivenengineeringofcriticalinformationsystems[J].Science of Computer Programming, 2015, 103(6): 88-113.
[9]HoltJ,PerryS,PayneR,etal.Amodel-basedapproachforrequirementsengineeringforsystemsofsystems[J].IEEE Systems Journal, 2015, 9(1): 252-262.
[10]LiK,LiXM,LiuD.Modelingmethodforweaponsystemofsystemsstructurebasedonsemanticmeta-model[J].Systems Engineering and Electronics,2015,37(11):2503-2512.(李亢,李新明,刘东.基于语义元模型的装备体系结构建模方法[J].系统工程与电子技术,2015, 37(11): 2503-2512.)
[11]XieWC,YuXH,ZhuPF.Model-transformationbasedexecutablemodel’sconstructionofC4ISRarchitecture[J].Systems Engineering and Electronics,2014,36(8):1537-1543.(谢文才,于晓浩,朱鹏飞.基于模型转换的C4ISR体系结构可执行模型构建[J].系统工程与电子技术,2014,36(8):1537-1543.)
[12]RaoBH,PadmajaK,GurulingamP.Abriefviewofmodelbasedsystemsengineeringmethodologies[J].International Journal of Engineering Trends and Technology, 2013, 4(8): 3266-3271.
[13]RamosAL,FerreiraJV,BarcelóJ.Model-basedsystemsengineering:anemergingapproachformodemsystems[J].IEEE Trans. on Systems, Man, and Cybernetics-Part C: Applications and Reviews, 2012, 42(1): 101-111.
[14]WagenhalsLW,LevisAH.Serviceorientedarchitectures,theDoDarchitectureframework1.5,andexecutablearchitectures[J].Systems Engineering, 2009, 12(4): 312-343.
[15]PfisterF,ChapurlatV,HuchadM,etal.Aproposedmeta-modelforformalizingsystemsengineeringknowledgebasedonfunctionalarchitecturalpatterns[J].Systems Engineering, 2012, 15(3): 321-331.
[16]ShanmugavelM,KumarS,RagavanV,etal.Unifiedmeta-modelingframeworkusingbondgraphgrammarsforconceptualmodeling[J].Robotics and Autonomous Systems, 2015, 72: 114-130.
Model-drivenrapidmodelingandanalysismethodologyforcrisisincidents
LIMing-hao,YANGKe-wei,XUJian-guo,TANYue-jin
(College of Information System and Management, National University of Defense Technology, Changsha 410073, China)
FocusedontheRussian-Turkishplaneincidentattheend2015,arapidmodelingandsimulationanalysisframeworkisestablishedbasedonthemodel-drivenmethodology,whichcanproviderapidmodelinganddecisionanalysissupportfortheemergencyjudgementofsimilarmilitaryconfrontationanddisputes.Morespecifically,scenariomodeling,executablelogicalanalysis,andvisualizedsimulationtechnologiesareemployedforstaticarchitecturemodeling,dynamicbehavioranalysis,andsimulationvalidation.Meanwhile,ModelLink,aself-developedrapidmeta-modelcustomizedmulti-viewmodelingtool,integratedwithotherthird-partyanalysisandsimulationsoftwarepackagesformsatool-crossmodelgeneration,analysis,andinteroperationchain.ItreceivestheinputfromsModelLink,andsupportsthequickmodelchangeandresponse.FortheRussian-Turkishplaneincident,open-sourceinformationfromRussian,Turkishandothersisfirstusedtobuildtwobasicscenariomodels.Then,thecomparisononanalysisresultsofdifferentmodelsverifiestherationalityandrealityofthedetailsofbothsides’statements.Moreover,theforegoingframeworkalsofacilitatesthemodelmodificationandoutputgenerationwithregardtotheinformationupdate.
crisisevent;model-driven;meta-model;rapidmodelingandanalysis;executablemodel;STKsimulation
2015-12-14;
2016-01-15;网络优先出版日期:2016-05-12。
国家自然科学基金(71501182,71571185)资助课题
N945.12
ADOI:10.3969/j.issn.1001-506X.2016.09.13
李明浩(1990-),男,博士研究生,主要研究方向为国防采办与体系工程、系统优化与综合集成。
E-mail:liminghao4869@sina.com
杨克巍(1977-),男,教授,博士,主要研究方向为国防采办与体系工程、智能Agent建模。
E-mail:kayyang27@nudt.edu.cn
徐建国(1992-),男,硕士研究生,主要研究方向为技术体系研究、基于模型的系统工程、复杂网络。
E-mail:xujianguo106579@163.com
谭跃进(1958-),男,教授,主要研究方向为系统管理与综合集成技术、国防采办与体系工程、任务规划与优化。
E-mail:yjtan@nudt.edu.cn
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160512.0907.002.html
