天波雷达多模分离的二维非满阵几何构型设计
2016-09-07郭跃宇位寅生许荣庆鲁耀兵
郭跃宇, 位寅生, 许荣庆, 鲁耀兵
(1. 哈尔滨工业大学电子与信息工程学院, 黑龙江 哈尔滨 150001;2. 北京无线电测量研究所, 北京 100854)
天波雷达多模分离的二维非满阵几何构型设计
郭跃宇1, 位寅生1, 许荣庆1, 鲁耀兵2
(1. 哈尔滨工业大学电子与信息工程学院, 黑龙江 哈尔滨 150001;2. 北京无线电测量研究所, 北京 100854)
天波雷达在探测舰船等慢速目标时,会受到展宽一阶海杂波Bragg峰的影响,其中电离层分层结构导致的多模现象是展宽的主要原因之一。传统的一维接收线阵不能提供俯仰维信息,从而接收了多个模式的回波,二维阵可以从根本上解决这个问题。通过研究二维非满阵波束方向图和多模海杂波二维空域分布的关系,给出阵列几何构型设计方案,从而在空域滤除不需要的模式,达到提高海杂波一阶谱纯度的目的。仿真结果表明,与一维接收阵列相比,十字阵列对多模海杂波的抑制提升可达到20dB。
海杂波; 多模; 二维阵; 空域滤波
0 引 言
船目标检测是天波超视距雷达信号处理的难点之一。根据目标多普勒与海杂波一阶谱位置的差异,检测通常在多普勒域完成[1]。海杂波一阶谱具有很高的回波功率,因此被海杂波一阶谱占据的多普勒区域内的目标很难被检测到,除此以外的区域称为可检测区。一阶谱谱线越窄,可检测区越大,越有利于谱峰附近的慢速目标检测。
电离层物理分层结构导致的“多模”现象是一阶谱展宽的原因之一[2]。对电波起反射作用的电离层主要有E层和F层,同频电波进入电离层的入射角决定了其在不同层反射。由于发射波束在俯仰向为宽波束,因此电波可能在不同层反射,从而导致不同的传播模式。不同模式的杂波叠加进入相同的群距离单元,由于不同电离层运动状态差别将导致海杂波一阶谱位置和展宽不同,因此与单模情况相比,多模叠加导致了多普勒可检测区变小。
工程上通常通过选频避免多模出现,然而选频首要考虑的是避开占据大量频带的短波干扰,因此可选频带有限,不是总可以找到单模下的工作频率[3]。一些学者提出通过波前自适应感知等信号处理方法[4],然而这些方法有很强的模型依赖性,并没有从根本解决问题。
由于不同模式对应的俯仰角不同,使用平面阵列提供方位-俯仰二维分辨力是解决问题的有效手段。通过二维空域滤波分离不同模式,可以提高一阶谱纯度。考虑到造价因素,天波雷达可以使用一些非满阵几何配置,如L型阵[5-6]、十字阵、Y型阵[7]、X型阵[8]、蜻蜓型阵[9]等。
典型的二维阵有澳大利亚西部的金达莱雷达以及法国的Nostradamus雷达。在2006年澳大利亚的Abramovich等发表的文献[5]中介绍了使用L阵列作为接收阵的空域滤波,该实验滤波针对的是应答器信号,应答器信号可看作空域点杂波,而海杂波是空域连续分布的杂波。随后Abramovich等人使用多输入多输出(multipleinputmultipleoutput,MIMO)技术,从收发两个方向同时空域滤波,提出了模式选择雷达概念,并发表了一系列文献[8,10-13]报道实验结果。其中文献[8]中收发分别采用两个线阵形成X阵,成功将海杂波的多个模式进行了分离,说明了该方案的可行性。MIMO天波雷达是未来重要的发展方向,有很多值得讨论的问题,例如正交波形设计、虚拟阵列波束方向图合成等。
法国的Nostradamus雷达采用Y型阵列。文献[14]利用Nostradamus雷达引入俯仰角控制来丰富电离层返回散射电离图的信息,从而选择最佳的工作频率和俯仰角,并为坐标配准提供更准确全面的信息。最终的目的是为了实现不需辅助设备的完全自主的雷达。
本文通过研究天波雷达连续海杂波在二维角度空间分布与平面非满阵列波束方向图的关系,从而确定可行的平面阵几何构型。需要强调的是:对于任意空域分布的连续杂波,只有二维满阵才能实现滤波。本文研究用特定几何构型的二维非满阵滤除的空域连续杂波,是限制在天波雷达多模背景下具有特定形态的,而非任意形态的连续杂波。最后通过仿真验证了该几何构型的滤波效果。
1 多模海杂波的空间分布
传统天波雷达发射宽波束照射海面,典型波束宽度为10°~20°,假设有两层电离层平行于地面,图1为某一群距离门接收到的回波,可以看出其分布于离散的、由电离层高度以及探测距离等参数决定的俯仰角以及连续的、由发射波束宽度决定的方位角范围内。通过二维空域滤波,可以在将接收波束指向某二维角度方向的同时,在其他回波方向形成很低的旁瓣或零点,从而将探测方向的信号分离出来。由于需要滤除的杂波在空间是连续分布的,因此称为连续分布杂波。在前文提到的多数文献报道的试验中分离应答器或者直达波多个模式所对应的是空间离散杂波,二者具有一定的区别。

图1 多模海杂波的空间分布示意图Fig.1 Spacial distribution of multimode sea clutter
为分析方便,这里将杂波空间分布从方位-俯仰空间转为(u,v)空间[15]。设发射阵列基线在x轴,其法线为y轴,波束主瓣为y轴正向;阵列中心指向天顶为z轴正向,满足右手螺旋定则。θ是俯仰角,规定指向天顶为90°,φ是方位角,指向x轴为0°,指向y轴为90°。 几何关系如图2所示。

图2 坐标系和角度设定Fig.2 Coordinate frame and angle setting
(u,v)两个变量是表示某空间指向的射线与x轴、y轴夹角的余弦值,它们和(θ,φ)空间的关系为
(1)
除去指向天顶的方以外向,两空间是一一对应的关系,因此(u,v)空间基本上可以代替(θ,φ)空间进行讨论。
虽然两个空间是一一对应的,但是并非线性变换,图3为两个域的对应关系,根据式(1),线段θ=θ0对应(u,v)空间半径为cosθ0的半圆,而线段φ=φ0对应(u,v)空间经过原点,斜率为cotφ0的线段。
根据前面的分析,天波雷达多模情况下回波在(θ,φ)空间的典型分布就是θ=θ1和θ=θ2两条线段,在(u,v)空间表现为两段圆弧,如图4所示。实际上,由于距离分辨力有限,杂波在俯仰域有一定扩展,但是扩展很小,所以这里用线段表示杂波分布。

图3 (u,v)域和(θ,φ)域的关系Fig.3 Relationship of (u,v) region and (θ,φ) region
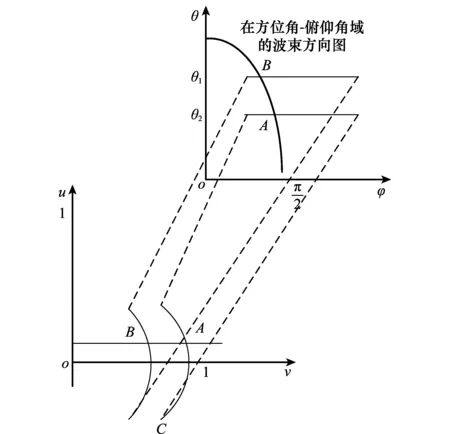
图4 多模海杂波和一维阵列波束方向图Fig.4 Multimode sea clutter and beam pattern of one-dimensional array
接收一维阵置于x轴,可得波束方向为图4中粗实线AB,该粗实线表示主波束所在区域,具有一定宽度。从(u,v)域和(θ,φ)域都可以看出:当用一维线阵观察低仰角A点回波时,高仰角的B点杂波也进入接收天线内,从而导致多模信号叠加。
一维线阵无法分开多个模式的信号,考虑采用平面阵列,最理想的波束方向图是笔状波束,可以将波束指向待检测区同时滤掉其他方向的回波,如图5所示。根据单位脉冲信号的傅里叶变换,这需要二维满阵才能实现。对于天波雷达,满阵所需要的造价太高,下面考虑非满阵的几何构型。
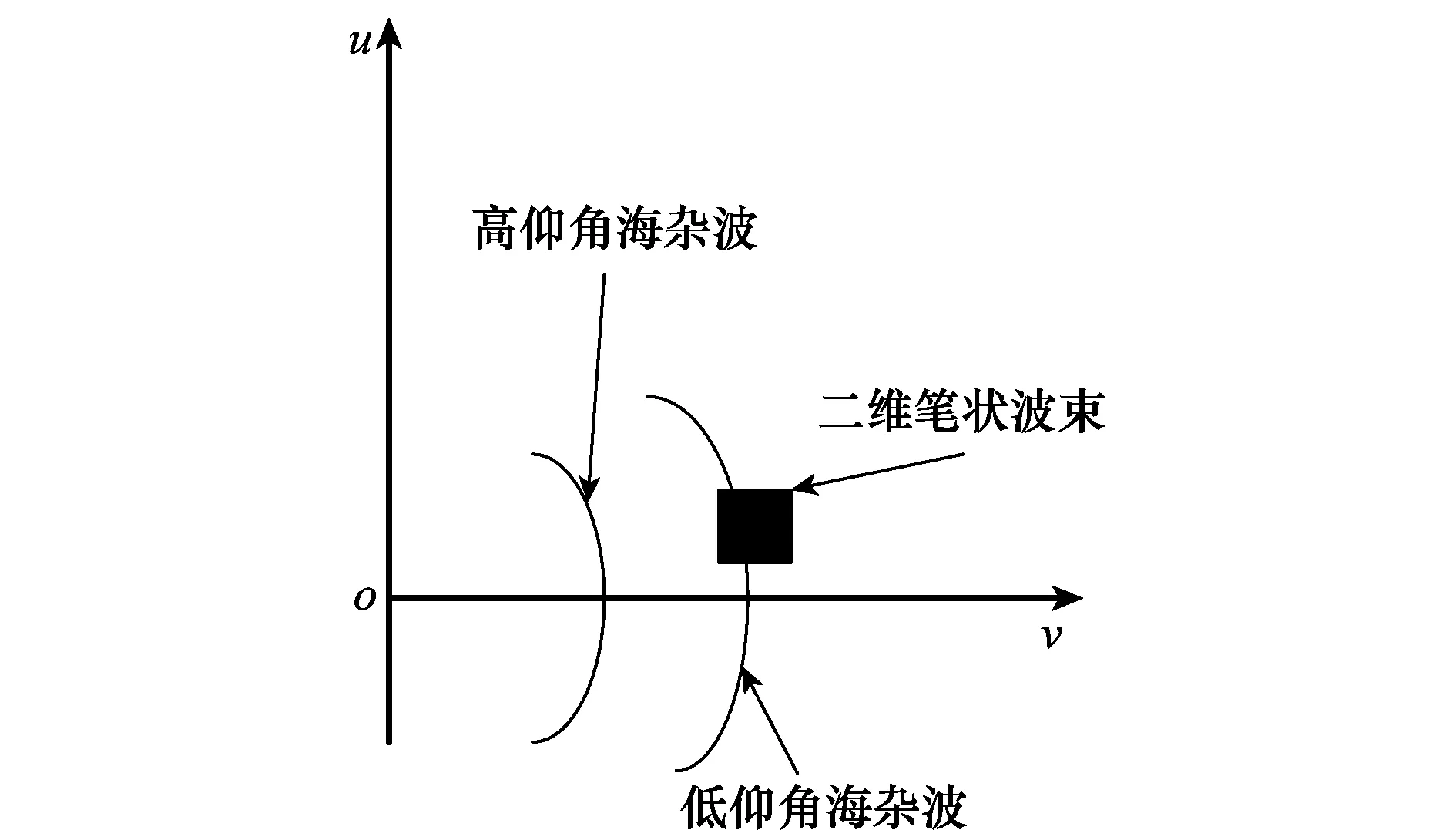
图5 理想二维阵列波束方向图Fig.5 Theoretical beam pattern of two-dimensional array
2 二维非满阵的波束方向图
一大类典型的二维非满阵几何构型是由几个一维线阵组合而成,例如前文提到的L阵、十字阵、Y型阵、X型阵,还包括π阵、T型阵、V型阵、蜻蜓型阵等。已知一维线阵的波束方向图,不难得到这些组合阵的波束方向图,下面以常见的L阵为例说明。
考察L阵列波束方向图在(u,v)空间的分布。对L阵列进行线性加权,L阵列的一个特殊之处就是其加权在(u,v)空间不是耦合的,即对L阵列的加权可以看成分别对两个一维线阵进行加权后再线性相加:
(2)

对于某个一维线阵,例如x轴线阵,图6为32阵元的一维线阵波束方向图在(u,v)空间的形状,阵元间距为半波长。通过加权可以改变波束方向图在u空间的形状,但是在v空间却是全向的。如果通过加权使x轴线阵波束方向图指向u0,那么在(u,v)空间内将出现一条栅瓣脊u=u0,该栅瓣脊上所有值都是相等的。同理对y轴的加权也会产生栅瓣脊v=v0。

图6 一维线阵波束方向图Fig.6 Beam pattern of one-dimensional array
考虑两个垂直放置于地面的一维线阵的叠加,如果两个线阵其中一个加权值占优,意味着|λ|≪1 或者|λ|≫1,此时二者叠加的结果近似于加权值占优的一维线阵波束方向图,二维阵失去了意义。
如果两个线阵加权值可比|λ|≈1,先考虑两种特殊情况λ=1和λ=-1,注意到采用传统导向矢量方法时两个一维线阵在波束指向处的相位为0,因此λ=1和λ=-1分别对应两个线阵同相相加和反相相消两种情况,在λ=1时,在两条栅瓣脊相交的点产生幅度二倍于栅瓣脊的波峰,此时在(u,v)空间归一化波束方向图中,两条栅瓣脊变为两条幅度为-6dB的旁瓣脊,图7为两个垂直放置的共计16阵元的L阵列波束方向图,阵元间距为半波长。除了十字脊线外的其他点幅值可以通过传统加窗方式压低,因此影响L阵列性能主要是十字旁瓣脊。

图7 L阵列在(u,v)空间的波束方向图Fig.7 Beam pattern of L array in (u,v) region
图8为V型阵、Y型阵的波束方向图。
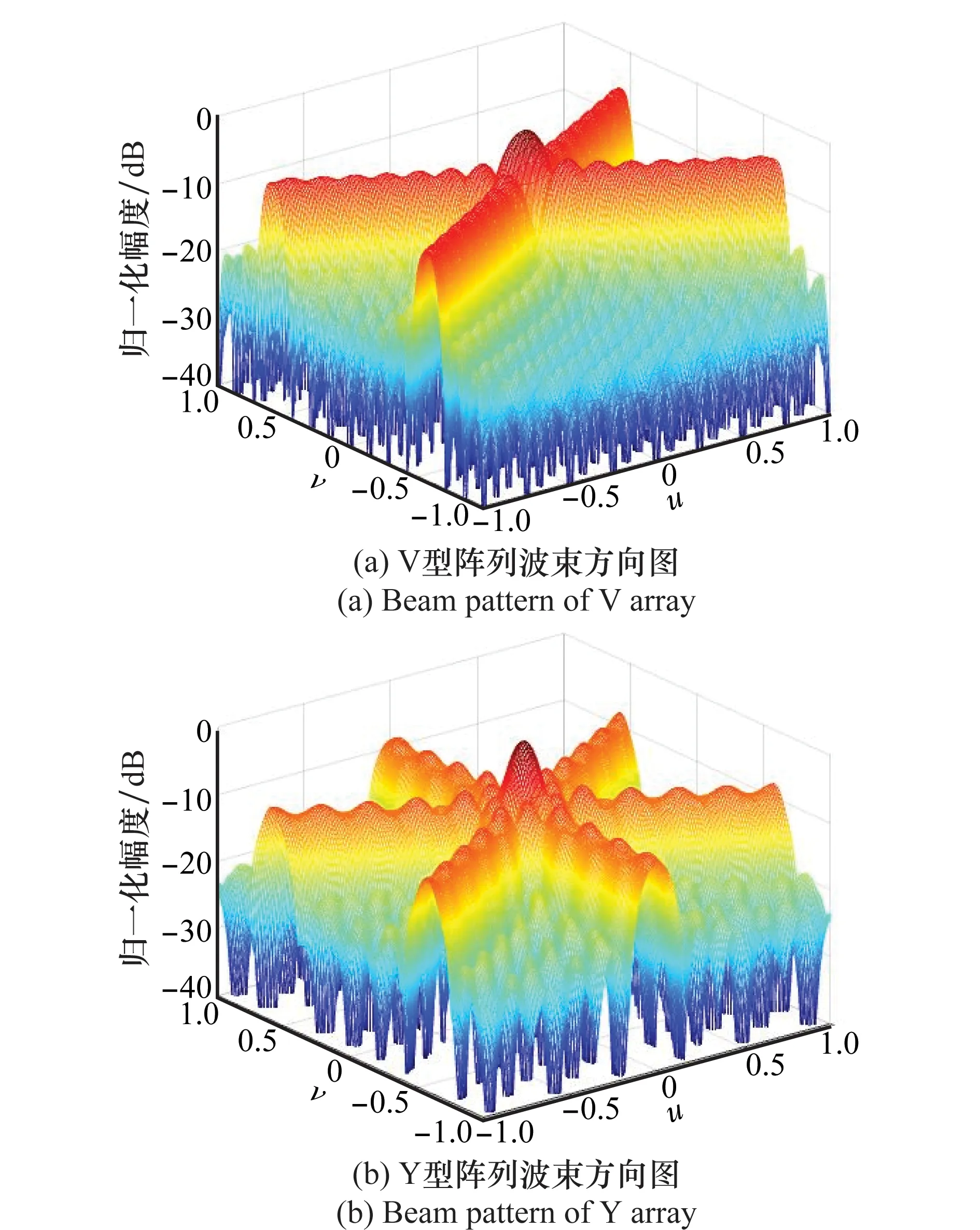
图8 V型阵和Y型阵的波束方向图Fig.8 Beam pattern of V and Y array
由图8可知,由若干线阵组成的平面非满阵的波束方向图是每个线阵的波束方向图的复数叠加,因此在(u,v)空间内形成很高的旁瓣脊。天波雷达海杂波在(u,v)空间的分布由探测距离、发射波束宽度和波束指向以及随机的电离层高度决定,因此具有较大变化范围和不确定性。这些因素导致非满阵波束方向图的旁瓣脊在(u,v)空间与杂波有交集,从而不能实现多模分离。
例如对于L阵,尽管其半功率波束宽度优于一维线阵,但是旁瓣脊仍然接收了其他模式的杂波。如图9所示,用L阵列试图接收A点的回波,但是高旁瓣使得B点和C点的高仰角杂波也进入接收天线,从而导致滤波失败。将主波束指向待检测区A点,不能避免多模杂波进入接收天线。

图9 L阵列滤波效果Fig.9 Filtering result of L array
3 二维非满阵实现空域滤波
为了在B点设置零点实现滤波,考虑如下加权方式:仍采用传统导向矢量方法,但是将两个线阵的输出结果反相相加,即λ=-1,此时可以在十字旁瓣脊的交点处形成零点,将零点移动到需要滤波的位置(B点或C点)便可以进行滤波。如图10所示,波束方向图在B点形成零点,只有待检测区域A点回波进入接收天线。注意一般发射波束方向图都有一定宽度,因此回波在(u,v)空间为一段圆弧而不是整个圆。
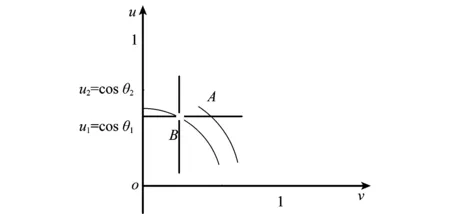
图10 十字阵列滤波效果Fig.10 Filtering result of cross array
按照以上思路形成的波束方向图如图11所示,该图给出了L阵波束方向图的-3dB和-7dB等高线,每个线阵阵元总数为41个,间距为半波长。注意到尽管在交点(u=0.6,v=0.6)处形成零点,但是在交点左上和右下方各有一个很高的峰值,根据图11不难看出,杂波可以通过这两处的峰值进入接收天线,导致滤波失败。

图11 L阵列波束方向图的零点效果Fig.11 Nulling result of L array beam pattern
峰值形成的原因是尽管L阵两个线阵在交点处刚好相位相反,但是每个线阵波束方向图在波峰附近的相位变化导致不是每一点相位都反相相消,有些点甚至同相相加。从而有很高的响应输出。如图12所示,箭头方向表示一维线阵相位增加方向,虚线表示由相位反相相消形成的零点,粗实线表示由于同相相加形成的峰。这个结论和波束形成的结果相呼应。
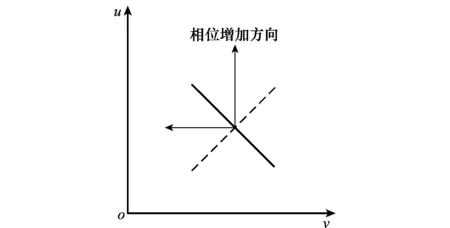
图12 L阵列作为两个一维线阵的叠加Fig.12 L array as a combination of two one-dimensional arrays
为了保证相位反相,希望一维线阵波束方向图的相位恒定。对于一维线阵,当参考相位中心选择在阵列端点时,相当于因果空域滤波器,其波束方向图不具有恒定的相位[16]。只有当相位中心选择在阵列中点时,并且阵列加权值相对中心共轭对称分布时,波束方向图才具有恒定相位,可以保证两个线阵在交点附近反相相加。L阵列两个线阵的物理中心并不重合,考虑采用十字阵列,其形成零点的波束方向图如图13所示,每个线阵阵元总数为41个,间距半波长,对每个线阵进行了切比雪夫加权。可以看出L阵列零点附近的波峰消失了,并且在沿着杂波线附近形成零深。此时也可以将置于x轴的阵列作为主阵,置于y轴的阵列作为辅助阵用于形成零点。

图13 十字阵列波束方向图零点效果Fig.13 Nulling result of cross array beam pattern
如图13所示,对两个线阵进行相同的加权会导致零深的走势也为一个十字,这与图中滤波位置(0.6,0.6)处的杂波线相匹配,滤波效果最佳。然而当需要滤波的位置发生改变时,为了得到最佳的滤波效果,就需要杂波线与零深的走势相同。切比雪夫加权可以显式地控制旁瓣水平和波束宽度的关系,通过调整切比雪夫权值可以控制波束宽度,从而调整零深的走向,使其与待滤波处的杂波方向相匹配。文献[15]给出了切比雪夫加权主旁瓣比R和第一零点位置ω0的关系:
(3)
式中,x0为中间变量;N为阵元数。
(4)
其中,cosh为双曲余弦。将式(4)代入式(3)即可得到主旁瓣比R和第一零点位置ω0的关系。通过需要的波束宽度得到主旁瓣比,即可通过Matlab获得加权系数。如图14所示,波束指向(u=0.98,v=0.51),对应的波束宽度分别为0.08和0.06。调整后的零深走向与杂波线方向相匹配。
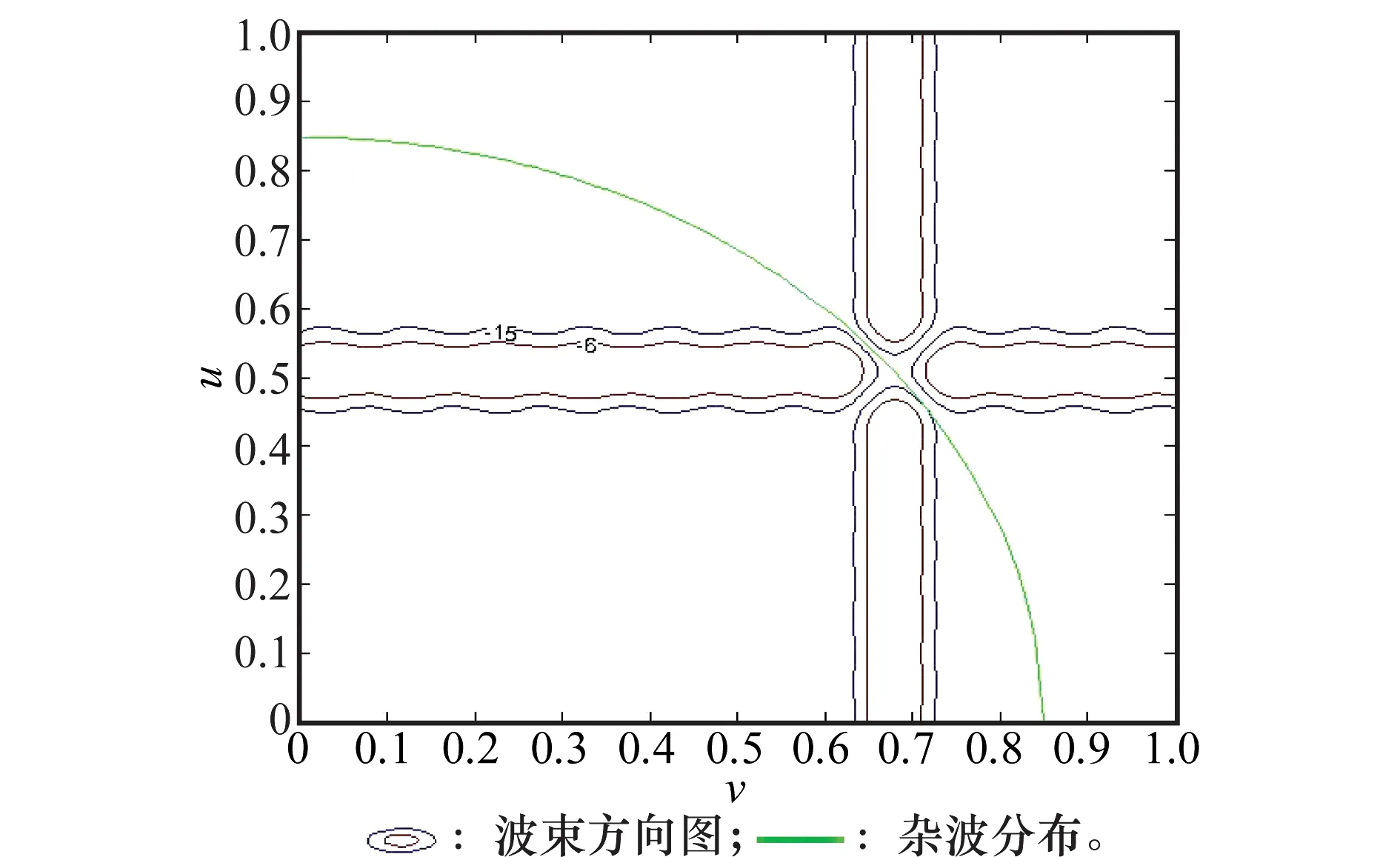
图14 通过调整波束宽度调节凹口形状Fig.14 Notch shape adjustment via beam width alteration
除十字阵列外,X阵列也是每个线阵物理中心重合的阵列,实际上十字阵是X阵列的一种特殊情况。改变X阵列两个线阵的夹角,可以调整其波束方向图旁瓣脊在(u,v)空间的夹角,该夹角的最优选择取决于雷达参数以及环境参数,是复杂的工程问题,有待后续讨论。
4 仿真结果
仿真假设E层回波没有经历电离层的相位污染,F层有一定的相位污染,污染函数为余弦函数形式。为了更准确地显示滤波效果,仿真没有加入噪声,并假设在积累时间内回波的方向是稳定不变的,E层回波和F层回波的幅度相同,且在空间是均匀的,不随方位角变化。
发射阵列为在y轴的线阵,3dB发射波束范围v∈(0.5,0.7),E层高度为100km,F层高度为300km,监测海域的地面距离为1 136km,由此计算出E层回波俯仰角为10°,群距离1 150km。通过计算可知为地面距离975km处的海杂波通过F层进入相同的群距离单元,俯仰角为32°。发射信号带宽设为30kHz,可以计算出由距离分辨力导致的F层杂波线的宽度为0.001,因此可以作为“线”来处理。
接收阵列每个线阵的天线个数为101个,处于y轴的接收阵列作为接收主阵,指向为v=0.6,而x轴的接收阵列作为辅助阵,与y轴阵列一起形成以(u,v)=(0.6,0.6)为中心的零点区域。
按照以上参数设置可以给出波束方向图与多模海杂波在空域的分布,如图15所示。图中绿线为-20dB等高线,可以看出由蓝线表示的待滤除海杂波完全处于该等高线以外,而黑线表示的待探测区域的海杂波则得到了保留。

图15 波束方向图与海杂波空域分布Fig.15 Beam pattern and special distribution of sea clutter
图16(a)为只有E层回波时一维线阵接收的海杂波谱,此时多普勒可检测区最大。图16(b)为同时有E层回波和F层回波的情况下,采用传统一维线阵的一阶谱,由于F层扰动导致的多普勒扩展与E层回波相叠加,造成了多普勒可检测区减少。图16(c)为采用L阵列进行滤波,阵列参数同图11,由于L阵波束方向图在杂波区域上产生了新的谱峰,滤波的结果甚至不如一维线阵,扩展多普勒区域的功率增加了。图16(d)为采用十字阵列进行滤波,阵列参数同图13,由于在杂波区形成零点,滤波效果很理想。通过计算可得仿真给定参数下十字阵列对多模杂波的抑制提升(相对于一维线阵)达到了20dB。
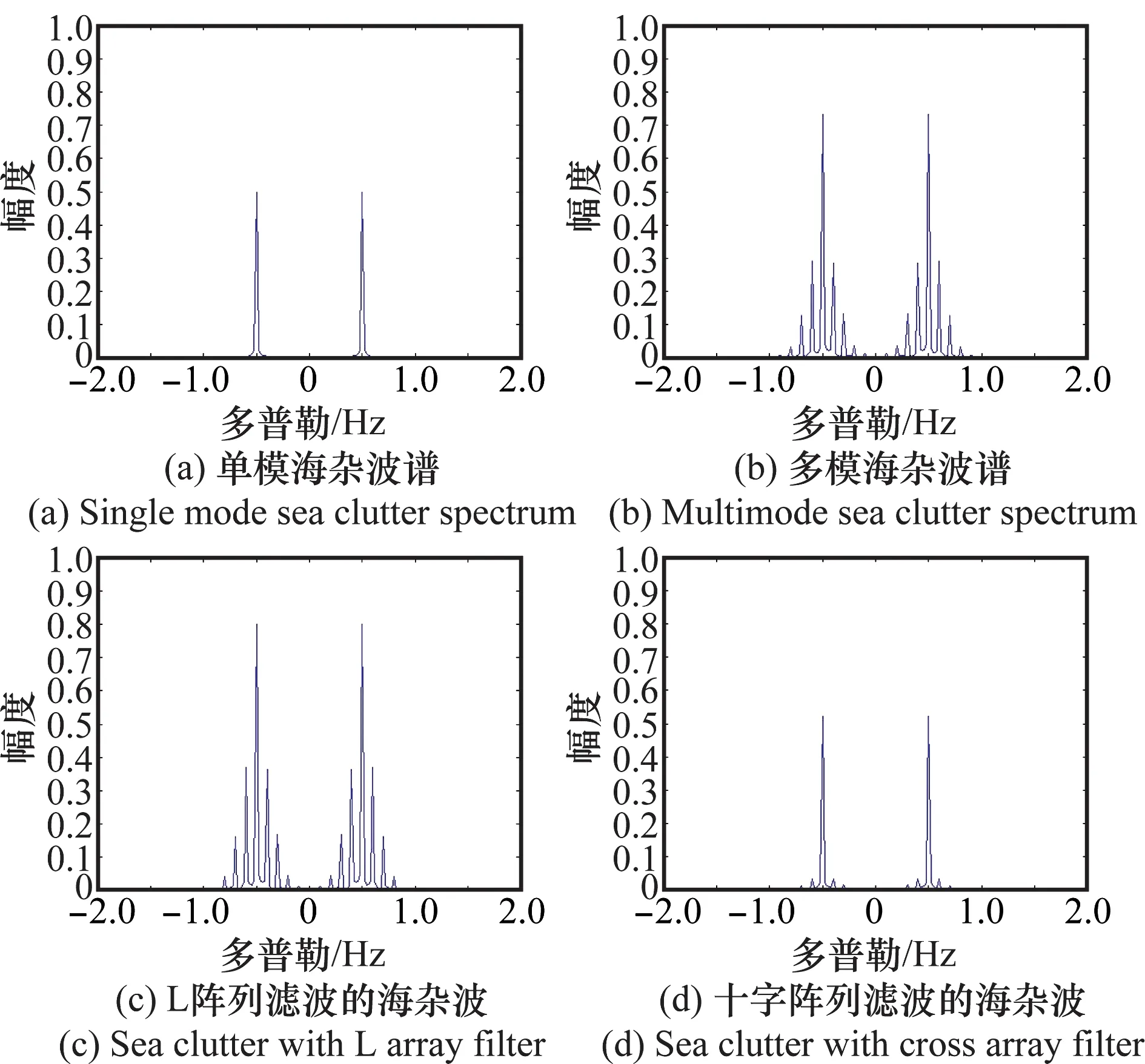
图16 空域滤波仿真结果Fig.16 Simulation result of spacial filtering
5 结 论
天波雷达多模现象是导致海杂波多普勒扩展的主要原因之一,本文通过采用十字阵列进行俯仰滤波滤除不需要的模式,从而达到增加多普勒可检测区的目的。该方法的优点是:仅通过较少阵元就实现了对空域连续分布杂波的滤除,权值可以通过理论计算得出,无需数值优化,并可以调整波束方向图零深在波束域的走向,从而适应杂波的空域分布。
十字阵作为平面非满阵的一种布阵方式,具有滤除天波雷达空域连续分布海杂波的能力。后续有以下问题有待进一步讨论:滤波权值的计算需要已知不同模式俯仰角,该俯仰角的获取可以通过处理接收数据获得角度信息或者通过斜测图等获得的虚高信息进行计算;在两层俯仰角差别较小、电离层数较多或波束较宽的情况下,该方法的使用将受到限制。
[1]BarnumJ.Shipdetectionwithhigh-resolu-tionHFskywaveradar[J].IEEE Journal of Oceanic Engineering, 1986, 11(2): 196-209.
[2]FabrizioGA. High frequency over-the-horizon radar: fundamental principles, signal processing, and practical applications[M].NewYork:McGraw-HillEducation, 2013: 283-284.
[3]ZhouWY,JiaoPN. High frequency over-the-horizon radar technology[M].Beijing:PublishingHouseofElectronicsIndustry, 2008: 326-330. (周文瑜, 焦培南. 超视距雷达技术[M].北京:电子工业出版社,2008: 326-330.)
[4]KazanciO,BilikI,KrolikJ.Wave-frontadaptiveraymodeprocessingforover-the-horizonHFradarcluttermitigation[C]∥Proc.of the 41th Asilomar Conference on Signals, Systems and Computers,2007:2191-2194.
[5]JohnsonBA,AbramovichYI.Elevationfilteringinwide-apertureHFskywaveradar[C]∥Proc.of the IEEE Radar Conference, 2007: 367-372.
[6]TianWL,LiGP,XuRQ.Ionosphericcluttermitigationforhigh-frequencysurface-waveradarusingtwo-dimensionalalarrayandbeamspaceprocessing[J].IET Radar, Sonar and Navigation,2012, 6(3): 202-211.
[7]BazinV,MolinieJP,MunozJ,etal.AgeneralpresentationabouttheOTH-radarNOSTRADAMUS[C]∥Proc.of the IEEE Conference on Radar, 2006:634-642.
[8]FrazerGJ,HeitmannAJ,AbramovichYI.Initialresultsfromanexperimentalskew-firemode-selectiveover-the-horizon-radar[C]∥Proc.of the IEEE Radar Conference, 2014: 350-353.
[9]BerizziF,DalleME,MonorchioA,etal.Onthedesignofa2DarrayHFskywaveradar[C]∥Proc.of the IEEE Radar Conference, 2008: 1-6.
[10]AbramovichYI,FrazerGJ,JohnsonBA.Principlesofmode-selectiveMIMOOTHR[J].IEEE Trans.on Aerospace and Electronic Systems, 2013, 49(3): 1839-1868.
[11]AbramovichYI,AntonioGS,FrazerGJ,etal.SuperdirectivemodeselectiveOTHRwithtime-divisionMIMObeamfor-ming[C]∥Proc.of the IEEE Radar Conference,2014:1384-1389.
[12]FrazerGJ,AbramovichYI,JohnsonBA.mode-selectiveOTHradar:experimentalresultsforone-waytransmissionviatheionosphere[C]∥Proc.of the IEEE Radar Conference, 2011: 397-402.
[13]AbramovichYI,SanAntonioG,FrazerGJ.Over-the-horizonradarsignal-to-externalnoiseratioimprovementinover-sampleduniform2Dantennaarrays:theoreticalanalysisofsuperdirectiveSNRgains[C]∥Proc.of the IEEE Radar Conference, 2013: 1-5.
[14]BenitoE,BourdillonA,SaillantS,etal.InversionofOTHradarbackscatterionogramsobtainedbyscanninginelevation[C]∥Proc.of the IEEE Radar Conference,2008:1-5.
[15]TreesV. Optimum array processing. detection, estimation and modulation theory(Part IV)[M].NewYork:Wiley, 2002.
[16]OppenheimAV,SchaferRW,BuckJR. Discrete-time signal processing[M].3rded.NewJersey:PearsonEducation, 2009.
Geometrydesignoftwo-dimensionalnon-filledarrayformultimodeseparationinskywaveradar
GUOYue-yu1,WEIYin-sheng1,XURong-qing1,LUYao-bing2
(1. School of Electronics and Information Engineering, Harbin Institute of Technology,Harbin 150001, China; 2. Beijing Institute of Radio Measurement, Beijing 100854, China)
Skywaveradarisinfluencedbythebroadenfirst-orderseaclutterBraggpeakswhendetectingtheslow-movingtargetsuchasships.Themultiplelayersofionosphereleadtomultimodewhichgivesrisetobroadenpeaks.Thetraditionalone-dimensionalreceivearraydoesnotprovideelevationinformationsothatitmixessignalsfromdifferentlayersbuttwo-dimensionalarraycanresolvetheproblematroot.Therelationshipofthebeampatternoftwo-dimensionalnon-filledarrayandtwo-dimensionalspatialdistributionofseaclutterundertheconditionofmultimodeisstudied.Aschemeofarraygeometryispresentedwhichispreparedforspatialfiltering.Thepurityoffirst-orderpeaksofseaclutterimprovesaftertheunwantedmodeisfilteredout.Simulationresultdemonstratesthat20dBgainofcluttersuppressioncanbeachievedfromthecrossarraycomparedwiththeone-dimensionalarray.
seaclutter;multimode;two-dimensionalarray;spatialfiltering
2015-08-31;
2016-03-03;网络优先出版日期:2016-07-03。
国家自然科学基金(61471144)资助课题
TN958.93
ADOI:10.3969/j.issn.1001-506X.2016.09.10
郭跃宇(1987-),男,博士研究生,主要研究方向为高频雷达信号处理。
E-mail:1guoyueyu@sina.com
位寅生(1974-),男,教授,博士研究生导师,博士,主要研究方向为雷达信号处理、阵列信号处理、雷达系统分析与设计。
E-mail:hitweiys@126.com
许荣庆(1958-),男,教授,博士研究生导师,博士,主要研究方向为雷达系统分析与设计、雷达信号处理。
E-mail:xurongqing@hit.edu.cn
鲁耀兵(1965-),男,研究员,博士,主要研究方向为雷达总体设计、雷达信号处理。
E-mail:hwg_ycc@yeah.net
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160703.1236.002.html
