基于Cruise-Isight的纯电动轻卡动力系统参数匹配及优化研究
2016-09-06白志浩李存俊BaiZhihaoZhouChengLiuNiuLiCunjun合肥工业大学机械与汽车工程学院安徽合肥230009
白志浩,周 呈,刘 牛,李存俊Bai Zhihao,Zhou Cheng,Liu Niu,Li Cunjun(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
基于Cruise-Isight的纯电动轻卡动力系统参数匹配及优化研究
白志浩,周呈,刘牛,李存俊
Bai Zhihao,Zhou Cheng,Liu Niu,Li Cunjun
(合肥工业大学 机械与汽车工程学院,安徽合肥230009)
以某款纯电动轻卡为研究对象,按照所设定的整车动力性和经济性指标,对动力系统各部件参数进行匹配设计,集成整车仿真软件Cruise和优化软件Isight进行联合仿真,依据优化算法理论,设计合理的组合算法对变速器各挡传动比进行优化。结果显示,优化后的百公里能耗降低了12.8%,续航里程提升了14.8%。
纯电动轻卡;仿真;集成;组合算法;优化
0 引 言1
随着经济的发展,我国面临着越来越严重的能源危机和环境污染问题,有关数据显示,我国每年的原油消耗中汽车用油占30%,这在一定程度上限制了我国经济的快速发展,且汽车尾气也是造成环境污染的重要原因。发展绿色环保的新能源汽车,成为解决上述问题的重要途径。
纯电动汽车作为新能源汽车的一种,其动力来自电能,真正做到零污染、零排放,成为汽车行业发展的一个趋势。在纯电动汽车的开发过程中,动力参数的匹配及优化至关重要,它影响着整车的动力性和经济性[1-2]。目前,对优化方法的研究大都采用单一的优化算法,但单一的优化算法并不一定适合所有设计问题;由此,文中提出一种基于组合算法的优化方法,以纯电动轻卡为研究对象,研究并验证所采用的匹配及优化方法的可行性。
1 纯电动轻卡动力系统参数匹配
1.1整车参数及性能指标
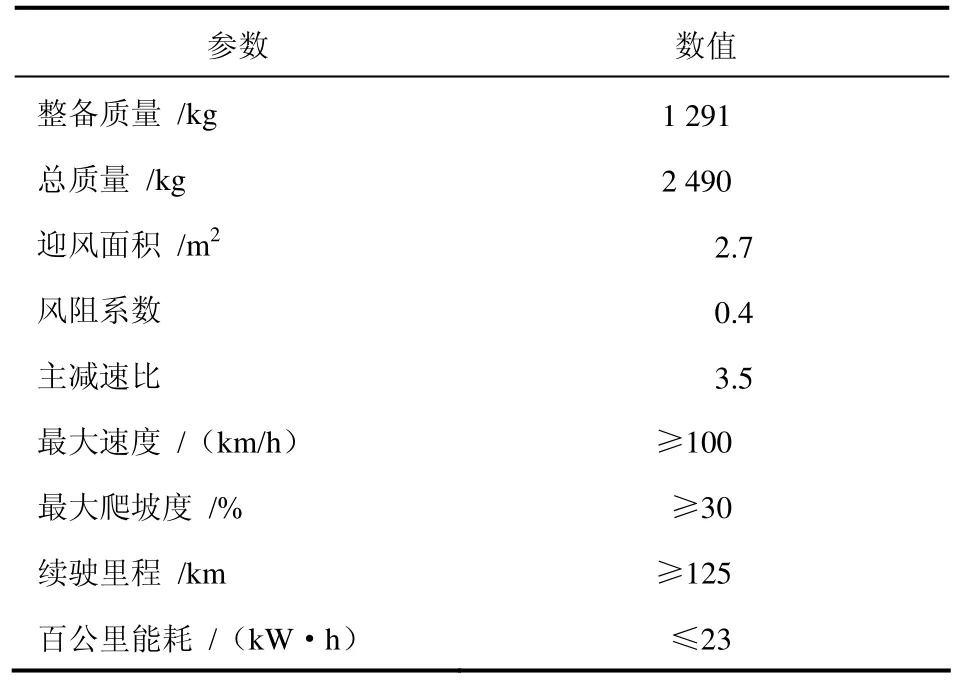
表1 整车参数及性能指标
1.2电机参数设计
电机参数的设计必须要满足整车的动力性指标,电动轻卡对加速时间要求不高,因此电机所能提供的最大功率只需能满足整车的最大速度和最大爬坡度要求即可[3-4]。
1)电机的最大输出功率应当不小于车辆以最大速度行驶时所需的功率,即
其中,Vmax,Cd,A分别为最大车速、风阻系数和迎风面积;f,η分别为传动效率和滚动阻力系数。
2)电机的最大输出功率应当不小于车辆匀速爬坡所需要的功率,即
其中,V,αmax分别为爬坡速度和最大爬坡度。
1.3电池参数设计
通过对比几种车用电池,决定采用性能更优越的磷酸铁锂电池,在循环工况(New European Driving Cycle,NEDC)测试中要求续驶里程达到125km,百公里能耗值不超过23kW·h,考虑到电器元件消耗和效率问题,初步确定纯电动汽车驱动电池总容量为30kW·h。
电池要为电机供电,电池的电压参数要与电机相匹配。初步确定电池额定电压为320V,电池容量为30kW·h。
1.4传动系传动比参数设计
1.4.1确定最大传动比
确定传动系最大传动比imax主要考虑最大爬坡度和附着力。
1)按最大爬坡度确定最大传动比,即
其中,ig1为第1挡传动比,i0为主减速器传动比,η为传动效率。
2)按附着力确定最大传动比,即
其中,Temax,r,G2分别为电机输出最大转矩、轮胎半径和后轴载荷;Fj,j分别为后轮最大附着力和附着系数。
1.4.2确定最小传动比
最小传动比按最高速度确定,即
其中,ig3,nmax分别为第3挡传动比和电机最高转速。
1.4.3挡位确定
增加变速器的挡位数能够改善汽车动力性和经济性,但挡位数越多变速器的结构越复杂,轮廓尺寸和质量加大。但在最低挡传动比不变的条件下,增加变速器的挡位数会使变速器相邻的低挡与高挡之间的传动比比值减小,使换挡工作容易进行。综合考虑,暂定挡位数为3,即ig1,ig2,ig3。
为了减小换挡难度,相邻挡位之间的传动比比值在1.8以下,即
根据表1中的整车参数及性能指标,按式(1)~式(7)进行计算,得到匹配结果,见表2。

表2 动力系统初步匹配参数
2 整车建模仿真分析
利用Cruise搭建纯电动轻卡的整车模型,并通过与Matlab(DLL)的接口,将换挡策略嵌入到整车模型中,由于Cruise中没有相应的切换挡位的模块,采用开闭离合器的方式,来达到切换挡位的目的。
将上节确定的动力系统参数输入到相应的模块,然后对该纯电动卡车进行仿真分析,来验证初步匹配的动力系统参数是否合理。在确定续航里程和百公里能耗时采用NEDC工况,仿真结束后得到车辆跟随曲线如图1所示,从图1可以看出,车辆跟随曲线总体比较理想,虽然不能达到NEDC最高速度为120km/h的要求,但车辆的最大速度超过了100km/h。从仿真结果中得出百公里能耗为22.84kW·h,续航里程为131.34km。
在确定最大爬坡度时,挡位设置为第1挡,爬坡速度设置为10km/h,仿真结束后,从仿真结果中得出挡位为第1挡且爬坡速度为10km/h时最大爬坡度为37.2%。
最大速度、百公里能耗、续航里程和最大爬坡度都能满足设定的整车目标,验证了初步匹配的动力系统参数的合理性。
3 变速器各挡传动比优化
由于不同的变速器传动比有着不同的动力和经济性能;因此,有必要对各挡位传动比进行优化。采用Cruise和Isight联合仿真的方式对变速器各挡传动比进行优化[5-7],在Isight中设定设计变量的范围、约束条件和目标函数,并确定要采用的优化策略。通过调用批处理文件的方式[8],让Isight调用Cruise并使其在后台运行,经过多次迭代,最终得到传动比的最优值。
3.1Isight和Cruise联合仿真
通过调用批处理文件的方式,让Isight在后台调用建立的Cruise整车模型。
以变速器各挡传动比为设计变量,以最大爬坡度、各挡之间的比值和百公里能耗最大值为约束条件,以百公里能耗为目标函数;选择合理的优化策略,通过优化计算,确定既满足约束条件又能使百公里能耗最小的各挡传动比值。
采用的优化策略为多种优化算法组合。组合算法中包括二次规划算法、下降单纯形算法和遗传算法。二次规划算法适合光滑连续问题且具有非常好的收敛性和数值稳定性;下降单纯形算法适合非光滑连续问题,具有非常高的效率;遗传算法适合不连续设计空间问题和全局优化问题,但计算费时。在迭代过程中根据求解域的不同自动选择优化算法。与采用单一优化算法相比可以在短时间内找到一个比较好的全局解,效率更高。文中通过采用单一优化算法进行对比来验证所选优化策略的高效性。
在优化进行过程中,可以实时查看监控目标函数的变化,得到不同优化策略的目标函数的寻优历程图。
图2为粒子群算法目标函数寻优历程,从图中可以看出,在整个迭代过程中,目标函数收敛效果不理想,且迭代次数较多。
图3和图4分别为遗传算法目标函数寻优历程和组合算法目标函数寻优历程。从图中可以看出,2种算法的目标函数收敛效果与粒子群算法的收敛效果相比较为理想,且组合算法比遗传算法迭代次数更少,验证了基于组合算法的优化方法的高效性。
3.2优化方案与匹配方案对比
将优化得到的最优解进行匹配分析后[9],代入到Cruise整车模型中进行计算,得到优化方案的整车性能,并与初步匹配方案进行对比,结果见表3。

表3 优化方案与初步匹配方案对比
从表3中可以看出,在保证最大爬坡度高于30%的基础上,通过优化使百公里能耗降低12.8%,续航里程提升14.8%。
4 结 论
优化后百公里能耗与优化前相比有明显下降,续航里程有明显提升,最大爬坡度虽然有下降,但基本满足动力性要求。对比单一算法和组合算法可知,组合算法在寻优过程中效率更高,验证了选用的动力系统参数匹配方法的合理性及基于组合算法的优化方法的高效性。
[1]余志生,夏群生.汽车理论[M].北京:机械工业出版社,2007:1-88.
[2]郭孔辉,姜辉,张建伟.电动汽车传动系统的匹配及优化[J].科学技术与工程,2010,10(16):3892-3896.
[3]尹安东,杨峰,江昊.基于Isight的纯电动汽车动力系统匹配优化[J].合肥工业大学学报(自然科学版),2013,36(1):1-4.
[4]呼和.增程式纯电动车动力系统参数匹配与优化研究[D].长春:吉林大学,2012.
[5]赵云飞.纯电动汽车动力系统参数匹配与性能优化研究[D].长沙:湖南大学,2011.
[6]周飞鲲.纯电动汽车动力系统参数匹配及整车控制策略研究[D].长春:吉林大学,2013.
[7]胡峰.基于遗传算法的汽车动力传动系参数多目标优化[D].武汉:武汉理工大学,2010.
[8]李军.基于 Cruise的某型大客车动力传动系统优化匹配研究[D].长春:吉林大学,2013.
[9]陈佼.某城市公交动力传动系匹配优化研究[D].南京:南京理工大学,2014.
U469.72
A
10.14175/j.issn.1002-4581.2016.04.006
1002-4581(2016)04-0023-04
安徽省自然科学基金项目(1308085ME64);合肥工业大学春华计划资助项目(2013HGCH0010)。
2016-02-26--
