追及问题中错解分析
2016-08-31安徽省太和中学孙恒启
安徽省太和中学 孙恒启
追及问题中错解分析
安徽省太和中学孙恒启
在运动学中,追及问题是比较容易出错的,尤其在我们初学的时候,总是不经意间就陷入题目所设置的“陷阱”中。结合平时的学习,我们一起来探讨一下关于追及过程中匀减速直线运动的问题。
一、追及和相遇
1.定义:指同一时刻到达同一位置。
2.两个关系:一是相遇位置与各物体的初始位置之间存在一定的位移关系。若同地出发,则相遇时位移相等。二是相遇物体的运动时间也存在一定的关系:若物体甲、乙同时出发,运动时间相等;若甲比乙早出发Δt,则运动时间关系为t甲=t乙+Δt。
要使两物体相遇,就必须同时满足位移关系和运动时间关系。
3.一个条件:两者速度相等,这往往是物体间能否追上、追不上或(两者)距离最大、最小的临界条件,也是分析判断的切入点。
例1甲、乙两辆汽车在一条平直的公路上同向行驶,甲在前,乙在后,甲的速度为v1=8 m/s,乙的速度为v2=16 m/s,当两车相距为L=8 m时,甲车突然以a1=2 m/s2的加速度做匀减速运动,同时乙车立即刹车,为了避免两车相撞,乙车的加速度至少应为多少?
分析解答本题时要注意相遇的条件:当乙车追上甲车时,若两车的速度恰好相等,则乙车刹车时加速度为最小值。再根据位移关系求出时间,根据速度相等条件求出加速度。
解设乙车刹车时加速度的最小值为a2,当乙车追上甲车且两车的速度恰好相等时,经过的时间为t,此时两车的速度为v,
根据位移关系,有s2-s1=L①,
对甲,根据运动学公式,
对乙,根据运动学公式,
有s2=v2t-③,
又因为v=v1-a1t④,
v=v2-a2t⑤,
由①、②、③、④、⑤并代入数据,解得:a2=6 m/s2。
乙车的加速度至少为6 m/s2。
点评本题是追及问题,关键是寻找临界条件。
拓展1对于例1,若L=16 m,其他条件不变,则乙车的加速度至少应为多少?
解答过程如例1,只需将L=8 m换成L=16 m,即可求得a=4 m/s2,即乙车的加速度至少为4 m/s2。
拓展2对于例1,若L=32 m,其他条件不变,则乙车的加速度至少应为多少?
解答过程如例1,只需将L=8 m换成L=32 m,即可求得a=3 m/s2,即乙车的加速度至少为3 m/s2。
仔细分析不难发现,拓展2的答案不妥。结合拓展1分析可知,对甲而言,4 s时已经停了,对乙来说,则需要s方能停止。究其原因,是出现了反向加速运动的情况,与实际情况不符,不符合题意。
对于拓展2的正确解答:
设乙车刹车时加速度的最小值为a2。当乙车追上甲车速度恰好相等时,经过的时间为t,此时两车的速度为v。
根据位移关系,
有s2-s1=L①,
对甲,根据运动学公式,
有v21=2a1s1②,
对乙,根据运动学公式,
有v22=2a2s2③,
根据图像亦可得到同样的结论。
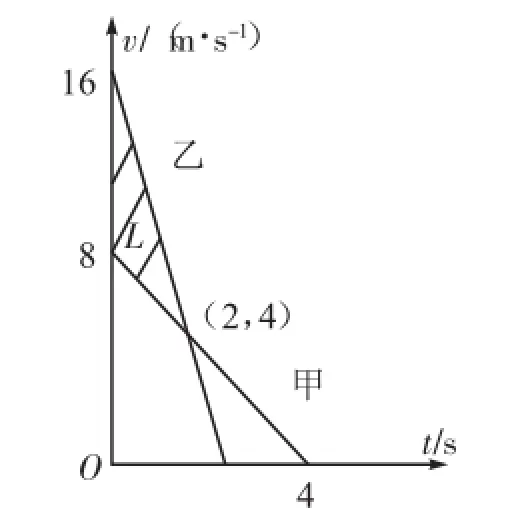
例1图
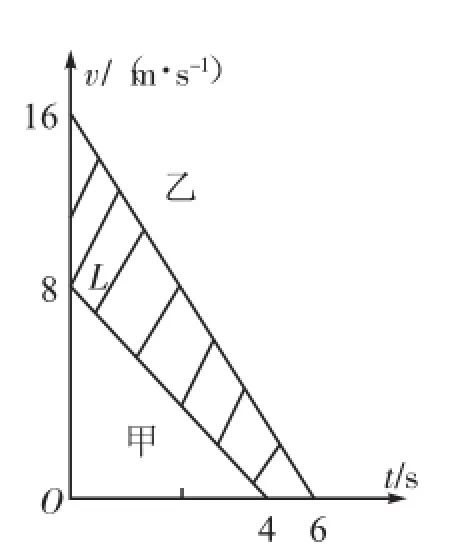
拓展2图
分析如图,例1图所示阴影部分的面积表示L=8 m,速度相等时刚好相遇,如果乙的加速度小些,则相遇时乙的速度仍大于甲的速度,不符合题意,即乙车的加速度至少为6 m/s2。
拓展1图所示阴影部分的面积表示L=16 m,速度相等且为零时刚好相遇,如果乙的加速度小些,则乙追上甲时乙的速度仍大于0,而此时甲刚好停止,不符合题意,即乙车的加速度至少为4m/s2。
拓展2图所示阴影部分的面积表示L=32 m,甲的速度为0时乙不可能追上甲,因此必须当乙刚好追上甲时速度也是0才符合题意,即乙车的加速度至少为
如何利用追及中的“两关系、一条件”是避免错误的核心内容,被追及的物体做匀减速直线运动时一定要注意“停而复返”和“停而止”的问题,相信结合图像分析能使我们更充分地理解。通过下面的例题,再来感受一下这一思想的巧妙之处。
例2如图,A、B两物体相距为s=7 m,物体A在水平拉力和摩擦力的作用下,正以vA=4 m/s的速度向右匀速运动。而物体B此时的速度vB=10 m/s,方向向右,由于摩擦力的作用向右做匀减速运动,加速度为a=-2 m/s2,那么物体A追上物体B所用的时间为()。
A.7 s B.8 s C.9 s D.10 s
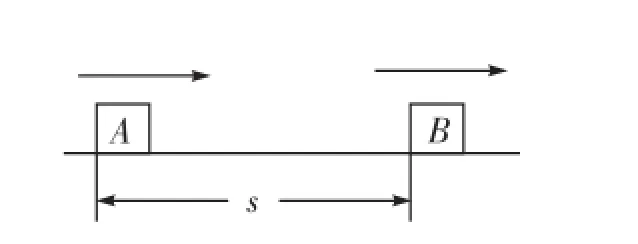
例2图
拓展对于例2,若改“由于摩擦力的作用”为“在外力和摩擦力的作用下”,其他条件不变则应选哪一项?
我们可以看到原题是“停而止”,而拓展则是“停而复返”,故答案分别为B和A。
通过这样的学习我们以后的学习中一定要注意多角度、多方法、多情景、多拓展地分析和解决运动学类的题目。◀