机械压力机的平衡制动系统教学实验平台开发
2016-08-29张立军刘晓聪刘延鑫李乐乐赵升吨
张立军, 刘晓聪, 刘延鑫, 李乐乐, 赵升吨
(1. 中国石油大学(华东) 机电工程学院, 山东 青岛 266580;2. 西安交通大学 机械工程学院, 陕西 西安 710049)
机械压力机的平衡制动系统教学实验平台开发
张立军1, 刘晓聪1, 刘延鑫1, 李乐乐1, 赵升吨2
(1. 中国石油大学(华东) 机电工程学院, 山东 青岛266580;2. 西安交通大学 机械工程学院, 陕西 西安710049)
为了加深学生对JH23-63型机械压力机制动系统及制动过程的认识与理解,在原有平衡制动系统的基础上,利用电气比例压力阀、位移传感器、压力变送器、光耦合测速传感器、减压阀、换向阀、PCL818数据采集卡和PCL726输出板以及计算机,开发了JH23-63型机械压力机的平衡制动系统教学实验平台。采用该平台对JH23-63型机械压力机的制动过程进行监测与实时控制,使得制动过程更加直观,提高了学生对制动系统理论的学习效率,达到了良好的实验教学效果。
机械压力机; 制动系统; 教学实验平台
1 平衡制动系统的工作原理
机械压力机是用曲柄连杆或肘杆机构、凸轮机构、螺杆机构传动的锻压机械,是用于对材料进行压力加工的机床。通过对坯件施加强大的压力和准确的位移使其发生变形和断裂来加工成零件[1]。JH23-63型压力机是机械压力机中比较常见的一种,在“机械加工概论”、“液压传动与气动”等课程中均有讲述,其制动性是该压力机的重要特性,也是机械设计制造及其自动化专业、机械工程专业学生课程实验中重点学习的内容。
为了加深学生对JH23-63型机械压力机制动系统及制动过程的深入理解,本文改进现有压力机制动系统的结构,开发了JH23-63型机械压力机的平衡制动性教学实验平台。图1表示了该实验台的基本构成和工作原理。从图1中可以看出,该平衡制动系统主要有5条气路组成:由1DT、压力变送器I、减压阀和单向阀组成的平衡气路;由2DT、单向阀和减压阀组成的制动缸进气回路;由3DT和单向阀组成的制动缸排气罐回路;由4DT和3个单向阀组成的制动缸排大气回路;由电气比例压力阀和压力变送器组成的离合器控制回路[2]。通过编制控制界面,学生能对JH23-63型机械压力机的制动系统进行实际操作,使其认识和熟悉常见机构的运作原理,掌握制动系统中所涉及的电气比例压力阀、单向阀、减压阀、换向阀等气压元件的结构特点和使用方法,了解位移传感器与光耦合测速传感器等的工作原理以及传感器的数据采集与处理过程。
该平衡制动系统的工作原理:由气泵来的高压气体经过分水滤气器、油雾器、减压阀进入到储气罐。为了保证制动缸有足够快的进气速度,选用了2个储气罐:一个是原压力机自身带的储气罐,主要保证向离合器气缸提供高压气体;另一个储气罐保证向制动缸和平衡缸供气。控制气路气压的大小由手动调压阀调节。电气比例压力阀1DT和4DT保持常开状态,使平衡缸在不通电状态下就能有一定的工作压力,使制动缸在不通电的状态下保持与大气相通,保证平衡缸的正常工作。

图1 JH23-63型机械压力机平衡制动系统基本构成及工作原理图
2 JH23-63型机械压力机的平衡制动系统教学实验平台的设计
JH23-63型机械压力机的平衡制动性教学实验平台的设计主要包括监测与控制元器件的布置、软硬件设计以及界面设计。
2.1实验平台监测与控制元器件的布置
为了保证实验平台实现对JH23-63型机械压力机平衡制动系统的精确监测与操控,必须能控制离合器摩擦副的接合和分离位置,以及离合器气缸进气与排气时间、平衡缸的进排气、制动缸的进排气和气压的选择等。
为此,在离合器气缸上安装气体压力变送器和电气比例压力阀,实现对离合器气缸内气压的控制;在制动缸上安装压力变送器、两位三通换向阀和减压阀来实现监测和控制制动气缸的缸内压缩气体的压力与其进排气时间;在平衡缸上安装压力变送器、换向阀和减压阀,以实现对平衡缸内的压力全面的计算机监测和控制;在滑块上安装位移传感器,以便时刻监测滑块的精确位置。在制动缸的气路上专门设计排气罐回路,将制动缸内的高压气体排入储气罐,制动后产生的高压气体重新回收利用,以节约能源。
2.2实验平台的硬件设计
JH23-63型机械压力机实施计算机控制时,必须把现场的各种测试参数,如位移和压力等连续变化的物理量,转换为计算机可识别的数字量输入到计算机进行数据处理,以实现对实际工作过程的控制。处理结果也应转换为电压或电流,以推动执行元件的工作[3]。因此,这里采用数据采集和信号输出的A/D和D/A转换板。A/D板采用的是数据采集卡PCL-818L,用来采集滑块位移传感器和各个压力变送器的信号,以实现上死点停止位置的控制和监测;D/A板采用的是D/A转换卡PCL-726来输出控制信号。
根据JH23-63型机械压力机的控制要求,搭建的JH23-63型机械压力机平衡制动系统的计算机监测与控制系统原理图如图2所示。从图2中可看出,该系统以微型计算机操作系统为平台,以控制算法模块为核心,以动作实现模块为框架,以执行模块为输出,通过电气比例压力阀和电控截止阀对机械压力进行控制[4]。
在实际中,为了防止系统中电源电压波动所带来的不良后果[5],分压电路、传感器和电气比例阀均采用稳压电源,保证电压信号的稳定性。动作实现部分采用计算机控制以后,大部分的控制都由程序代替,只有少量开关量输入独立于计算机控制软件模块以外。

图2 JH23-63型机械压力机制动系统的计算机监测与控制系统原理图
2.3实验平台的软件设计
该实验平台的软件系统主要由系统初始化、数据采集、机械压力机动作实现模块以及其他辅助模块组成。软件系统的主程序流程图见图3。图4为总体流程中的制动模块程序流程图。图3中的初始化A/D、D/A是指将A/D板PCL-818L的各个I/O端口初始化为零,停止其他运行的函数,释放所占用的资源[6-7];同时使D/A板PCL-726输出为零,相应地电气比例压力阀和截止阀上的电压为零。图3和图4中的判断框是依据滑块位移传感器、相关气缸中的压力变送器测试值等来判定的。
需要说明的是,该计算机控制系统已在滑块上安装了位移传感器,在执行动作控制时,计算机通过A/D板采集滑块上位移传感器电压值来判断是否达到上死点某一区域,通过采集各个压力变送器电压值来决定截止阀控制信号发送时间[8]。
此外,利用滑块上的位移传感器是否正在输出位移信号来判断滑块是否在运动,进而判断某个动作是否执行结束及已停车。因此位移传感器在这里起着关键作用。在实现基本动作时,计算机发出的电信号通过程序框图中的D/A输出到电气比例阀和各个截止阀上,使各阀按照规定时间进排气。
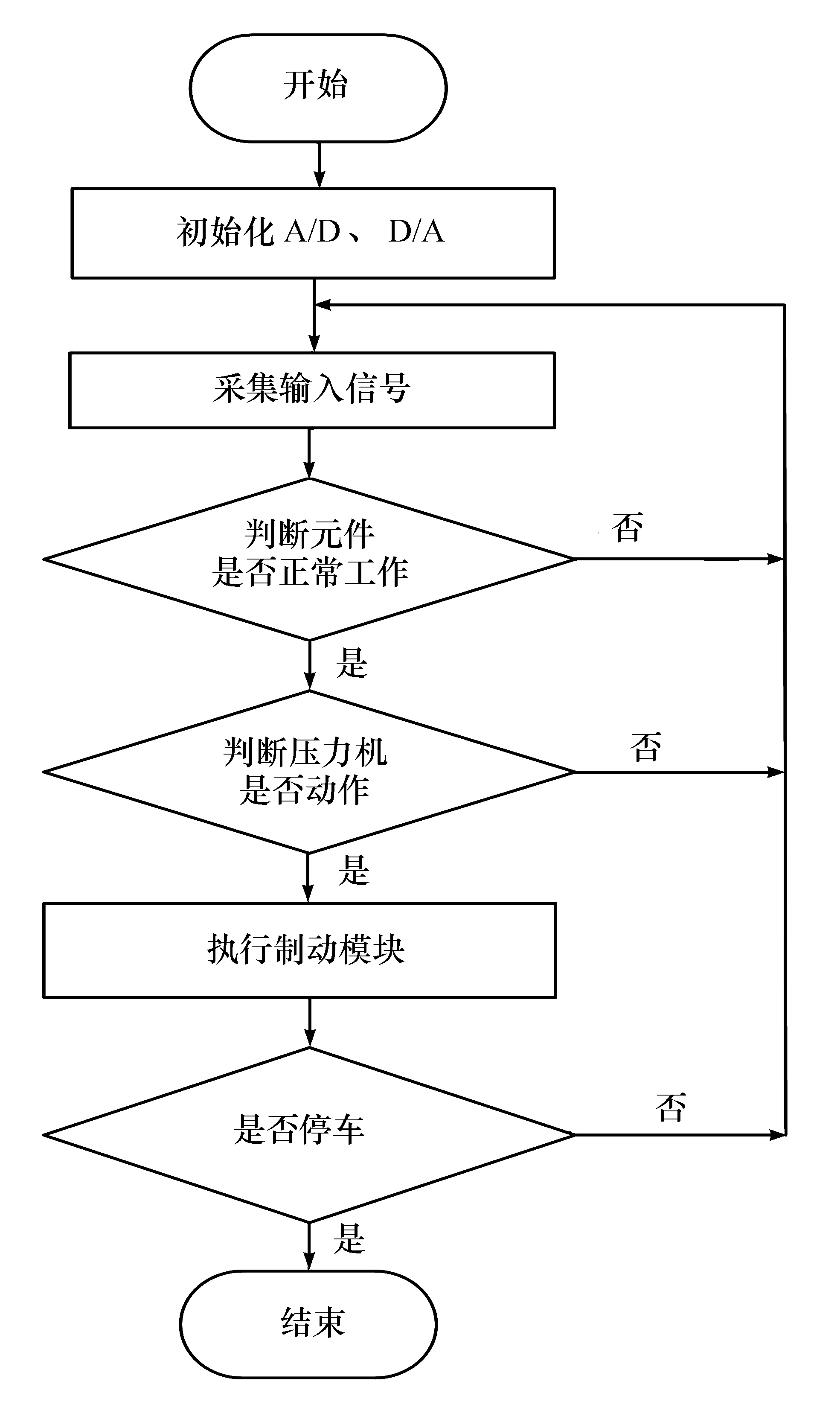
图3 主程序流程图
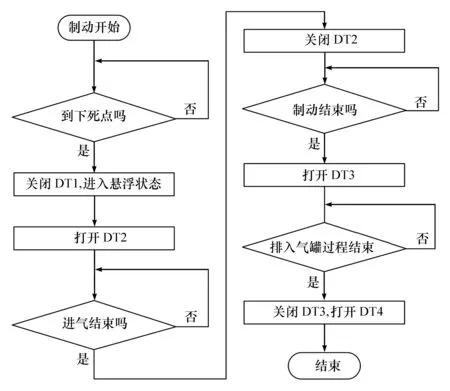
图4 制动模块程序流程图
2.4实验平台的界面设计
为便于计算机对上述动作过程进行精确控制,特用Delphi程序设计语言[9]设计编制了如图5所示的监控界面,只要用鼠标点击相应的按钮,就可进行动作控制。该控制界面由左右两部分构成。左边主要是A/D转换PCL-818L数据采集卡的输入测试界面,包括了7条电压测试信号输入通道,每个通道都可以选择其读取测试电压的范围。通过这些通道,可以测得滑块位移传感器和3个压力变送器的电压值,再经过硬件滤波和程序处理[10],便可由此来监控机械压力机滑块位移、离合器气压、制动气缸气压和平衡气缸气压各值的大小,并及时对输出信号进行反馈调节。另外,还有几个按钮,可以通过手动方式来单独改变读取信号的通道和是否保存采样得到的输出电压、气缸压力及滑块位移曲线,也可以决定机械压力机的运转与停止。控制界面右边主要是D/A转换PCL-726信号输出卡的控制输出界面,包括了6条电压控制信号输出通道,各个通道的输出电压都可以程序预设和手动调节。特别是对电气比例压力阀的控制部分,包括了电压输出和紧急制动两个按钮,用以控制离合器摩擦副的接合与脱开,也可实现离合器和制动器摩擦副的悬浮状态。上下死点停止按钮主要用来实现上下死点的停车,以达到某些实验的要求。其他各个按钮主要用来控制各个电控截止阀电压的通断,以实现机械压力机的基本操作规范[11]。

图5 JH23-63型机械压力机制动系统教学实验计算机监控界面
3 实验平台的测试与结果分析
利用该实验平台对制动缸初始气压为0.2 MPa和0.3 MPa时机械压力机在执行单次操作规范的一个完整工作周期中离合器接合与制动器制动过程进行实验测试情况。
图6和图7分别为制动缸初始气压为0.2 MPa和0.3 MPa时机械压力机在一个完整工作周期中离合器接合与制动器制动过程中电气比例阀电压信号、离合器气缸气压、滑块位移、飞轮转速和离合器轴转速的响应曲线。为了验证实验平台数据的正确性与合理性,又对该实验平台导出的各个元器件数据用图形进行比对分析,分析结果如下:从图6和图7中可以看出各参数信号的响应速度和滞后时间。当电气比例阀电压信号阶跃到5 V后,经过短暂的电制动和一定的气滞后时间,随着气缸内气压的升高,活塞由静止开始运动,并且压紧摩擦副产生摩擦分加速而主动部分减速,PFC摩擦副相对滑动终了后,二者共同达到新的稳定转速。此时气缸内的气压逐渐达到额定值。
在图6和7中后半部分还可以看出,当电气比例阀电压信号降低到大约1.5 V后,经过短暂的电滞后和一定的气滞后,离合器摩擦副脱开,同时制动气缸进气,从动部分处于悬浮的自由状态,从动部分在制动气缸压力的作用下减速直到速度接近为零。在滞后阶段,主动、从动部分以共同的角速度运转;在制动器进行机械式制动后,从动部分受制动器制动阻力作用,同时也受自身运动阻力矩的作用而迅速减速。在制动最后阶段,考虑到制动的可靠性和安全性,电气比例阀电压信号降到零,离合器气缸彻底排气,原有制动器摩擦副接合,使从动系统可靠地停止在上死点,最后完成整个工作周期。

图7 p0=0.3 MPa时离合器接合与制动器制动过程各个监控量曲线
另外,由于图6中制动气缸的初始气压较图7中的小,所以前者制动到上死点时从动系统没有完全停止运动。由图7可以看出,曲柄越过上死点一定角度后才在摩擦制动器作用下停止运动。图6和图7中离合器气缸气压曲线平台处出现抖动,与该段时间内离合器气缸气压力与制动弹簧力处于动平衡状态相吻合。
该实验平台结构简单、操作方便,观察直观,而且监测的实时数据与该类型制动器的制动运作原理[12]相吻合。同时该实验平台性能可靠,能够很好地实现机械压力机制动工作状态的检测与控制。
4 结语
本文设计的JH23-63型机械压力机的平衡制动系统教学实验平台可通过计算机控制实现制动器的制动过程,也可以监测制动系统的运作情况并将监测到的数据通过传感器采集显示在计算机中,直观地展示了JH23-63型机械压力机的制动情况。通过JH23-63型机械压力机的平衡制动系统教学实验平台,能较好地帮助学生认识和熟悉制动器中多种机械结构的运动机理,掌握系统中元器件在气压系统中的工作原理与使用方法,了解位移传感器、光耦合测速传感器等的工作原理以及传感器数据的采集与处理过程,丰富了学生在学习阶段对机电液一体化相关课程的整体认识与理解,达到了良好的实验教学效果。
References)
[1] 夏巨谌,王新云. 闭式模锻[M]. 北京:机械工业出版社,2013.
[2] 何予鹏. 机械压力机节能型气压式制动理论及其智能控制的研究[D]. 西安:西安交通大学,2006.
[3] 程佩青. 数字信号处理教程[M]. 北京:清华大学出版社,2001.
[4] 梯策U,胜克CH.高级电子电路[M]. 王祥贵,周旋,译.北京:人民邮电出版社,1984..
[5] 武自芳,虞鹤松. 微机控制系统及其应用[M]. 西安:西安交通大学出版社,1998.
[6] 杨素行. 微型计算机系统原理及应用[M]. 北京:清华大学出版社,1998.
[7] 赖寿宏. 微型计算机控制技术[M]. 北京:机械工业出版社,1996.
[8] Shim K G. Ramanatham P: Real Time Computer Science and Engineering[C]//Proc of the IEEE.1994, 82(1):6-25.
[9] 蒋方帅. Borland Delphi 程序设计[M]. 北京:清华大学出版社,2002.
[10] 陈康宁. 机械工程控制基础[M]. 西安:西安交通大学出版社,1997.
[11] 赵升吨,赵弘,周明勇,等. 机械压力机操作规范的计算机控制[J]. 仪器仪表学报,2002(增刊2):848-849, 852.
[12] 王军. 机械压力机节能型气压制动系统及其计算机控制的研究[D]. 西安:西安交通大学,2004.
Development of teaching experimental platform for braking system of JH23-63 mechanical press
Zhang Lijun1, Liu Xiaocong1, Liu Yanxin1, Li Lele1, Zhao Shengdun2
(1. College of Mechanical and Electronic Engineering, China University of Petroleum, Qingdao 266580, China;2. School of Mechanical Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
In order to deepen students’ understanding of the brake system and brake process of JH23-63 mechanical press, on the basis of the original balance principle of braking system, the teaching experimental platform for braking performance of JH23-63 mechanical press was developed by using electric proportional pressure valve, displacement transducer, pressure transmitter, optical coupling speed sensor, relief valve, reversing valve, PCL818 data acquisition card, PCL726 output card and computer, which can monitor and real-time control JH23-63 mechanical press brake process, and can also improve the efficiency of the students on the study of the theory of brake system, which achieves the good experimental teaching results.
mechanical press; braking system; teaching experimental platform
DOI:10.16791/j.cnki.sjg.2016.04.022
2015- 09- 29修改日期:2015- 11- 04
山东省高等学校教学改革项目“基于分类培养理念下的大机械类专业创新与工程教育综合改革”(2012018)
张立军(1977—),男,山东平阴,博士,副教授,研究方向为机电液一体化技术.
E-mail:zlj-2@163.com
TG315;G484
A
1002-4956(2016)4- 0077- 05
