基于DSP的异步电动机离散变频软起动系统*
2016-08-18许昕琪
许昕琪,郭 歌
(1.西安科技大学电气与控制工程学院,西安710054;2.陕西安康水力发电厂,陕西安康725000)
基于DSP的异步电动机离散变频软起动系统*
许昕琪1*,郭歌2
(1.西安科技大学电气与控制工程学院,西安710054;2.陕西安康水力发电厂,陕西安康725000)
针对电机的输出电磁转矩跟供电电源频率成反比,在不改变传统软起动系统主电路结构的基础上,通过有选择地控制晶闸管的导通和关断,使得一些工频半波导通或是不导通,对加在电机定子端的电压实现离散变频,使得基波频率发生变化,通过降低电压频率使得输出起动转矩增大。利用DSP高速数据处理能力,设计制作了离散变频软起动控制系统的实验装置,通过仿真试验和实验数据结果,验证了离散变频软起动在重载起动情况下的可行性和实用性。
重载软起动;离散变频;晶闸管;异步电动机;DSP
异步电动机全压起动产生过大的瞬间起动电流,可能导致电网电压降低或是导致电机无法正常起动,甚至是烧毁电机[1]。
离散频率控制方法(即分级变频),即是利用软起动器原有的主回路结构,通过选择性的触发控制工频电源的半波通过或截止来实现离散变频[2]。离散变频起动实现类似于变频器的起动效果,这样既有效的降低了电机的起动电流,又能提供较高的起动转矩,适用于重载起动[1]。
1 离散变频的原理分析
1.1离散变频的基本原理
离散变频就是通过调节三相反并联晶闸管的导通和关断,选择性的控制工频半波的导通和截止,因为基波频率只能是工频的整数分之一,所以称此种方式为离散变频[3]。
供电电源的频率为50 Hz,对此频率进行1/n分频,n为整数,所以经过分频后,可以成为2分频,3分频,4分频……等等,其分频子频率分别对应工频50 Hz的1/n。工频供电电源经过2分频、3分频、4分频后得到的子频率波形图如图1所示(阴影部分表示在该工频半波控制晶闸管开通,黑色曲线为分频子频率的基波波形)。由分频原理可知:经过选择性的控制工频供电电源的半周波的导通或关断,使得子频率基波频率发生改变,可是它的谐波频率是原三相工频供电电源的频率。
项目来源:基于多粒度知识发现的人群复杂行为模式分析即预测模型研究项目(61402360)
收稿日期:2015-07-21修改日期:2015-08-15
1.2离散变频的相位分析
对于同一波形,由于选择的半波不同,离散变频后得到的新波形的基波相位也有可能不同[4]。根据正弦信号的特点,每个工频周期由两个半波组成,有2个零点,那么r分频后新频率下波形的零相位点数ns=2r。
同理,可以得到其它频率下的不同分频波形和基波初相位,并可以计算出每一分频下所对应的基波个数,这些波形互差相等的θr,θr是通过在原始工频信号相邻的两个零点之间平移得到的。

图1 各分频电压波形图

设原工频信号的初始相位角为0o,则新频率下波形的相位角φr为:

这样对原本对称的三相电压,经过每相离散变频后,得到新频率下的三相组合由于初始角组合的不同就有可能不对称,还有可能相序发生了变化[1]。
表1给出了2分频的组合情况,这里将A相的初始相位角固定在0°进行分析,可以看到2分频时没有正序对称的组合。表2给出了3分频的组合情况。
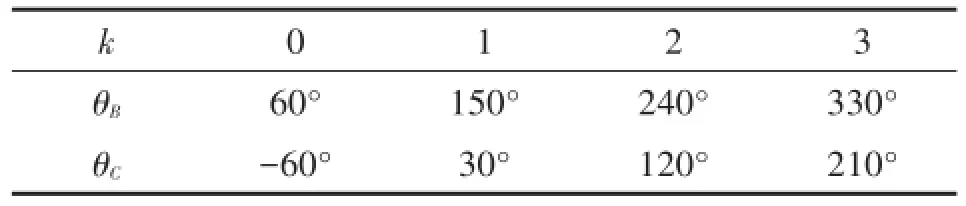
表1 r=2时B、C相的初始相位(θA=0°)
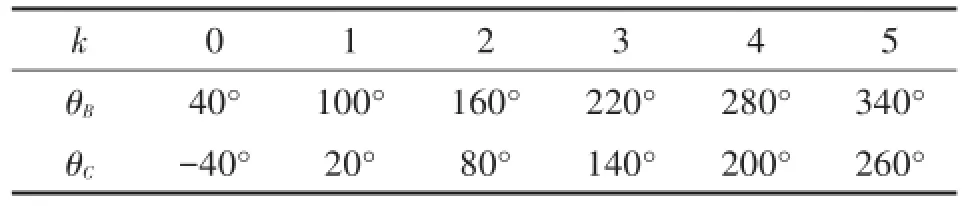
表2 r=3时B、C相的初始相位(θA=0°)
1.3对称相序的分析
三相感应电动机的转速及其旋转方向取决于它的电磁转矩大小和方向。三相工频供电电源的相序是正序对称的,电机的电磁转矩为正向,对应电机正转。所以,为了提高电机的起动转矩,首先要先确定哪些分频频率有正序对称的相位角组合,哪些分频频率没有对称的相位角组合,对于没有正序对称的组合,则要找出其正序分量最大且负序分量小的组合。下面对分频次数与基波相序的关系进行分析[4]。
假设三相交流供电电源是对称的,供电频率f0= 50 Hz,角频率为w0,周期为T0,A、B、C三相供电电源的电压分别为ua、ub、uc,则
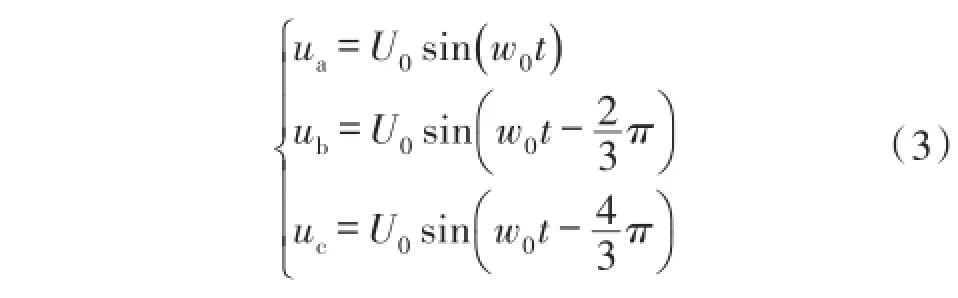
A相初始相位角为0度,B相和C相在整个时域内的相位角分别为:
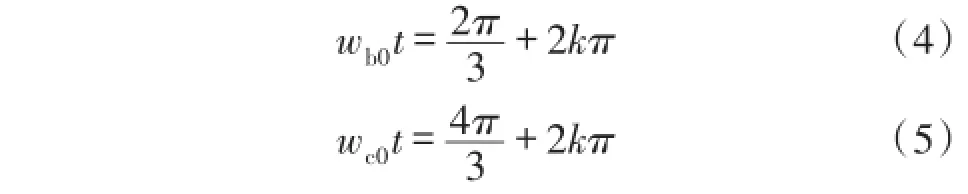
其中,k为整数。
设变频后新频率wr(rwr=w0)下B相电压的相位角为αB,αB是式(4)过零点中的一个角度,所以当wrt=αB时必有[4]:

B相电压的相位角:

若要产生的分频频率的相序与供电电源相序相同,即正序对称,则

可解得:

分频数为4,7,10,13…时,可以获得正序对称的分频频率。
同时,要产生的分频频率的相序是负序对称的,可求得:

分频数为2,5,8,11…时,可以获得负序对称的分频频率[5]。
对于其它分频数,如3, 6, 9, 12…,则找不到对称的相位角组合。
1.4最佳分频组合及频率等级的选取
离散变换后的三相相位角有正序对称、负序对称、不对称的情况。为了获得最大的正向电磁转矩,找到最优的分频频率相位角组合。这里我们采用了对称分量法将不对称的相序分解为正序对称分量,负序对称分量,和零序分量。例如对2分频的各种组合进行对称分量法进行分析,求得25 Hz下的最佳分频方式,即,(0°,-60°,-210°),(0°,-150°,-210°)和(0°,-150°,-300°)使得正序分量最大[6]。
由前面的分析可知,从50 Hz工频电源向下离散分频,所以应该尽可能的选择正序对称的分频频率,而对于不对称的分频频率来说,应该本着提高起动转矩和起动平滑性的原则来获得可以产生最大正序分量的相位角组合[2]。当分频频率较高时,各个分频频率间的跨度比较大,如果直接切换,会产生较大的转矩振荡,例如从4分频直接切换到工频,就是相当于直接从12.5 Hz跨越到了50 Hz,这样就会产生转矩突跳,严重时甚至可以导致起动失败,损坏电机。所以离散分频频率中的3分频和2分频还要保留,这样才能保证起动的平滑性。
1.5频率切换和转速检测
在离散变频软起动系统中,关键是要进行各频段的切换,而频段切换是根据电机转子转速作为判断依据的。因此,电机起动时要实时地检测电机转速,过早或过晚的切换都会造成电机运转的不稳定[7]。
离散变频软起动具体过程为:电机从最低离散频段开始起动,当达到该频段频率额定转速的90%时,切换到下一个离散频段,随后,当电机达到该频段频率额定转速的90%时再切换到下一频段,按这种方式使电机逐渐从低频段切换到高频段,然后转换到工频段。异步电动机在正常运行时突然失去电源电压后,转子电流在定子绕组中产生感应电压。该感应电压不会立即减小到零,而是保持一段时间,此电压称为失电残余电压,简称残压[7]。由于残压中包含了转速的信息,因此可利用残压来获得电机转速。
经分析,残压表达式为[8]:

uB、uC依次滞后uA120o。
式中:φ=arctan(-Trwr)。即其相位角设为 φ0= wrt+θ0+λ+φ。
由残压解析式(9)可知,残压幅值是由转子转速和转子电流共同决定;残压频率由转子转速决定。
针对恒转矩负载,其在断电后的转子转速按wr=wr0+kt线性下降的,将wr=wr0+kt代入到相位角的φ0的表达式中可得:

并让φ0的表达式对时间t求导可得:

由于φ=arctan(-Trwr)求导后对整体导数的结果影响不大,故将此部分忽略。
也可以表示为

式中:B=2k、A=wr0由此可得,相位角的导数φ0′是随时间线性变化的,且其线性变化律B=2k(k为转子转速的线性变化率),因此,若可求得A、B,就可得知wr=wr0+kt的具体表达式,进而可适时的估算转子转速。
在电动机的定子端采同步采样其三相失电残压,将等间隔采样来的n组数据经Clark变换,即

(uα、uβ分别为定子静止坐标系的横轴、纵轴分量),则P=。
uα、uβ合成的空间矢量的相位角为φ=arctan,将所求得的φ作为目标函数,然后对这组数据运用最小二乘法进行线性拟合,可求得系数A和B的估计值[9]。
2 系统的总体结构
电动机离散变频软起动控制系统的结构框图如图2所示,附以外围检测电路、脉冲触发电路等完成电动机的离散变频软起动控制[10]。
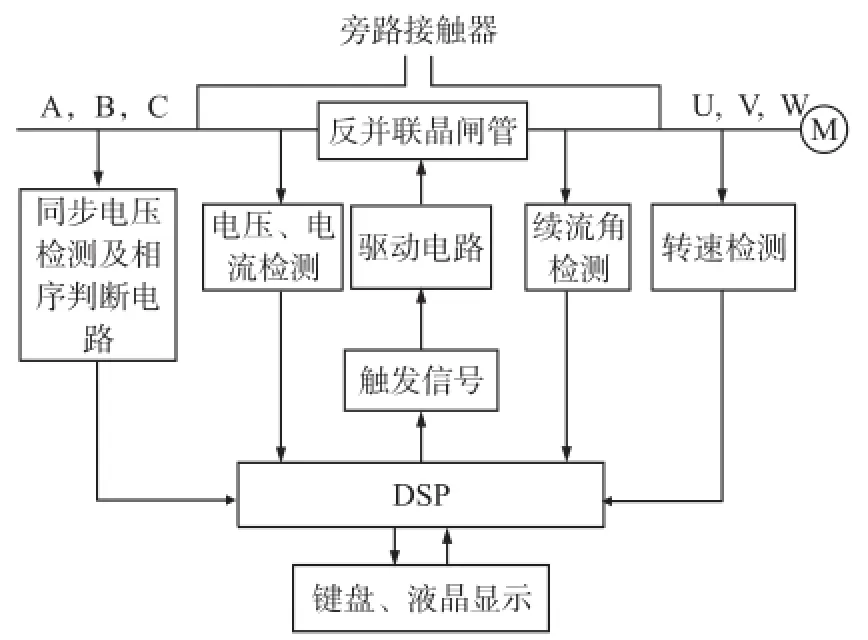
图2 系统的结构框图
下面分别具体介绍关键部分的设计:
(1)续流角检测晶闸管的电流过零点与同步信号过零点间的时间差计算出电机的续流角,可作为调整触发角的依据。
(2)电压检测将三相电源电压经变换调整后送入DSP,用于故障检测、过压及欠压保护、电压显示等。
(3)电流检测利用霍尔电流传感器检测电机的三相电流,通过调整使得输出信号满足A/D转换要求,将电流信息送入处理器中,完成限流软起动控制,同时作为过流、过载保护、电流显示等的依据。
(4)转速检测离散变频软起动系统中,关键是根据电机的转速进行各频段的切换,这就要求在电机起动时对转速进行实时地检测,过早或是过晚的切换都会造成电机运转的不稳定[7,9]。
(5)同步电压检测及相序判断触发晶闸管,必须要有一个时间基准,同步电压检测电路就是为触发信号提供时间基准的,是通过把三相供电电源信号转变为低电压的方波信号,直接输入给DSP,保证了调压电路的正常运行。相序判断是对电压的相序进行判断,确定电压是否是正序或者是负序,或者是相序故障[12]。
3 仿真、实验验证
3.1仿真验证
设针对恒转矩负载,其在断电后的转子转速按wr=wr0+kt(假设断电时刻t1=0,wr0=73,k=24)线性下降。将离散化后的三相残压经过Clark变换后,经过计算可以估算出转子转速的线性下降方程即wr=wr0+t,如图3所示。
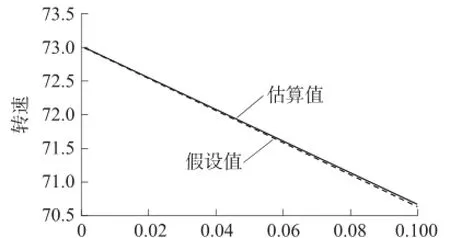
图3 仿真计算的转子转速与假设转子转速的曲线对比
由图3中曲线(实线为估算的转子转速曲线,虚线为假设的转子转速曲线)可知,由残压Clark变换后估算的转子转速与假设的转子转速的变化曲线基本一致,只有很细微的误差。由此可得,针对恒转矩负载运用失电残压来间接的估算转子转速是可行的且准确性好。
3.2实验验证
实验电机为380 V,1.5 kW,额定转速为1 390 rot/min的三相异步电动机。其控制芯片为dsPIC30F6014具体实物图如图4所示。
图4 离散变频软起动器实验装置
离散变频起动时,从13分频开始,依次通过7分频,4分频,3分频,2分频,再到工频运行。图5为离散变频运行过程的B相电流和K2和K5的触发信号波形图。
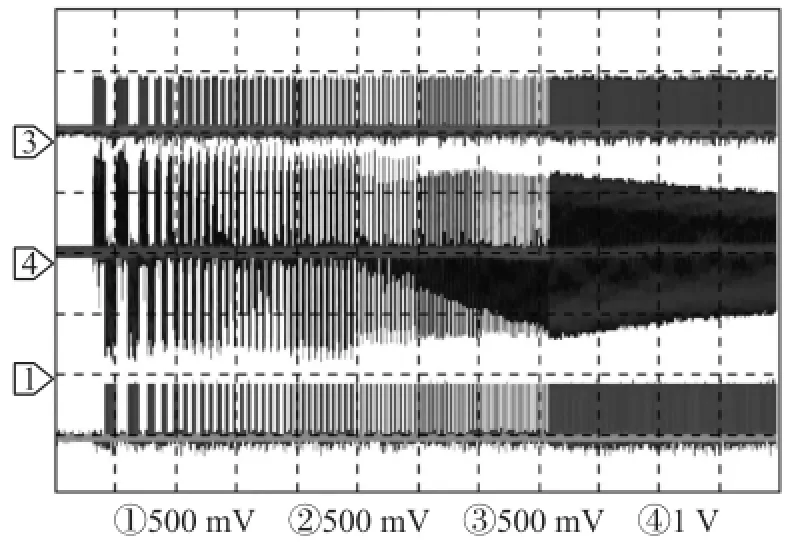
图5 离散变频运行过程的B相电流和K2和K5的触发信号波形图
从图5中可得,3为B相电路中的K2晶闸管的触发信号,1为B相电路中的K5晶闸管的触发信号,4为B相电流信号,K2和K5的触发信号都能够准确的触发对应的晶闸管按时导通,并且使得B相电流减小,起到了软起动的作用,确保了离散变频的可靠实现。
4 结束语
本文分析了离散变频调压、调频的基本原理,确定了分频下的最优相位角组合,并利用失电残压的测速方法,完成对转子转速的检测,选用DSP的高速数据处理能力及其外围硬件资源,采用dsPIC30F6014芯片,设计制作了离散变频软起动器实验装置。
通过实验验证,离散变频控制是可实现的,能够实现起动电流低、起动转矩高的目标,拓宽了传统电子软起动器的应用范围,具有广阔的应用前景。
[1] 刘磊.基于离散变频的电机软起动及节能控制器研究及实现[D].天津:天津大学,2011.
[2] 李冬辉,马跃贤,王波.离散变频软起动转速检测的新方法及其应用[J].电气传动,2007,37(11):14-17
[3] 王波.基于DSP的电动机离散变频软起动综合应用系统研究[D].天津:天津大学,2007.
[4] 周玲玲,苏彦民,常瑞.异步电动机变频软起动器的研究与实现[J].机床电器,2004(3):5-7.
[5] 王毅.基于DSP的三相异步电动机软起动控制器[J].中小电机,2001,28(6):34-36.
[6] 刘庆利.三相异步电动机离散变频软起动的研究[D].天津:天津大学,2005.
[7] 王玉峰,马广程,王常虹.晶闸管控制感应电机起动过程中振荡现象研究[J].中国电机工程学报,2002,6(3):86-90.
[8] 高吉增,杨玉磊,崔学深.感应电动机失电残压的研究及其对重合过程的影响[J].电力系统保护与控制,2009,37(4):45-48.
[9] 胡晓东,郭歌.基于失电残压的异步电动机转速估算方法研究[J].微电机,2015,48(4):30-33.
[10]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2000.
[11]兰志杰,张昌凡,陈颖,等.基于分级变频的重载软起动系统[J].电机与控制应用,2007,34(3):50-53.
[12]王栋,刘利.一种基于单片机的相序检测及电机缺相保护方法[J].电机与控制应用,2006,33(9):50-52.
[13]Hu Hongming,Mao Chengxiong,Lu Jiming,et al.The Torque Oscillation Study in the Motor Soft Starting Process with Discrete Variable Frequency Method[C]//Proceedings of the 11 th International Conference on Electrical Machines and Systems.ICEMS 2008:1686-1690.

许昕琪(1989-),女,汉族,江苏无锡人,助理工程师,硕士学位,现工作于西安科技大学,研究方向为微电子、电力电子方向,xuxq0208@163.com;

郭歌(1988-),男,汉族,陕西周至人,助理工程师,硕士学位,现工作于陕西安康水力发电厂,研究方向为电力电子与电力传动,guoge0036@163.com。
The Soft Starting System of Asynchronous Motor Based on DSP*
XU Xinqi1*,GUO Ge2
(1.College of Electrical and Control Engineering,Xi'an University of Science and Technology,Xi'an 710054,China;2.Shaanxi Ankang Hydropower station,Ankang Shaanxi 725000,China)
The output torque of the motor is inversely proportional to the power supply frequency,without changing the traditional soft start system on the main circuit structure,transistors can be selectively controlled to be turned on and off,thus some half-wave frequency is guided or not.The voltage applied to the motor stator is discrete,so that the frequency of the fundamental wave changes and the starting torque is increased by reducing the voltage frequency. Using the DSP high-speed data processing capability,the experimental device of the discrete variable frequency soft start control system is designed.The feasibility and practicability of the discrete variable frequency soft starting in the heavy load starting is verified by the experimental results of the simulation experiment and experimental device.
Heavy-load start;Discrete frequency-control;Thyristor;Asynchronous motor;DSP
TM921.2
A
1005-9490(2016)03-0714-05
EEACC:8310E10.3969/j.issn.1005-9490.2016.03.041
