救援机器人操作臂的正运动学分析与仿真
2016-08-18韩训梅
◆韩训梅
救援机器人操作臂的正运动学分析与仿真
◆韩训梅
救援机器人是当前机器人研究领域中的一个热点,它一般采用轮式或履带式车体加装操作臂的结构。机器人可以在远端被遥控从而实现半自主或自主作业,广泛应用于各种危险的救援场合。在自主研制的救援机器人基础上,根据作业环境特点及作业任务要求,对安装在该救援机器人移动平台上的操作臂进行运动学的正解、运动学仿真及优化研究。
救援机器人;操作臂;运动学分析
10.3969/j.issn.1671-489X.2016.12.036
1 引言
近年来多发的天灾(如地震、火灾)、人祸(如恐怖活动、武装冲突等)带来的危害,威胁着人们的安全,引起了社会的广泛关注。在一些危险性大的灾难中,施救人员无法深入进行侦探或施救,而救援机器人的加入可以有效地提高救援的效率,降低施救人员的危险系数[1]。
操作臂的结构和人的手臂相似,是由一系列的刚性连杆通过关节连接而成的,是机器人关键部件之一。它可以借助计算机编程实现各杆件各关节运动的自动控制,最终驱动末端执行机构手爪部件完成规定的任务[2]。安装有操作臂的救援机器人可以代替人从事很多高危险性的作业。
2 运动学模型坐标系的建立
本文的研究对象救援机器人的操作臂位于移动平台上,如图1所示。操作臂是关节型结构,腰关节和大臂相连,大臂可旋转、可摆动;大臂和小臂相连,小臂可摆动、可伸缩;小臂和手腕相连,手腕可摆动、可旋转,如图2所示,共计六自由度。
操作臂的正运动学分析是指根据各运动副的已知运动参数,求末端执行机构相对于给定坐标系的位姿[3]。对该操作臂进行运动学分析之前,首先要分析两相邻杆件之间的关系,即建立连杆坐标系。1995年,Denavit和Hartenberg提出用矩阵法,即D-H法,来建立连杆坐标系。D-H坐标系的模式有两种,即固连坐标系前置模式和后置模式。这两种不同的模式虽然会使导出的变换矩阵有所不同,但对最终各连杆的位姿分析没有影响。本文将采用固连坐标系前置模式来建立连杆坐标系,如图3所示。

图2 操作臂

图1 移动平台
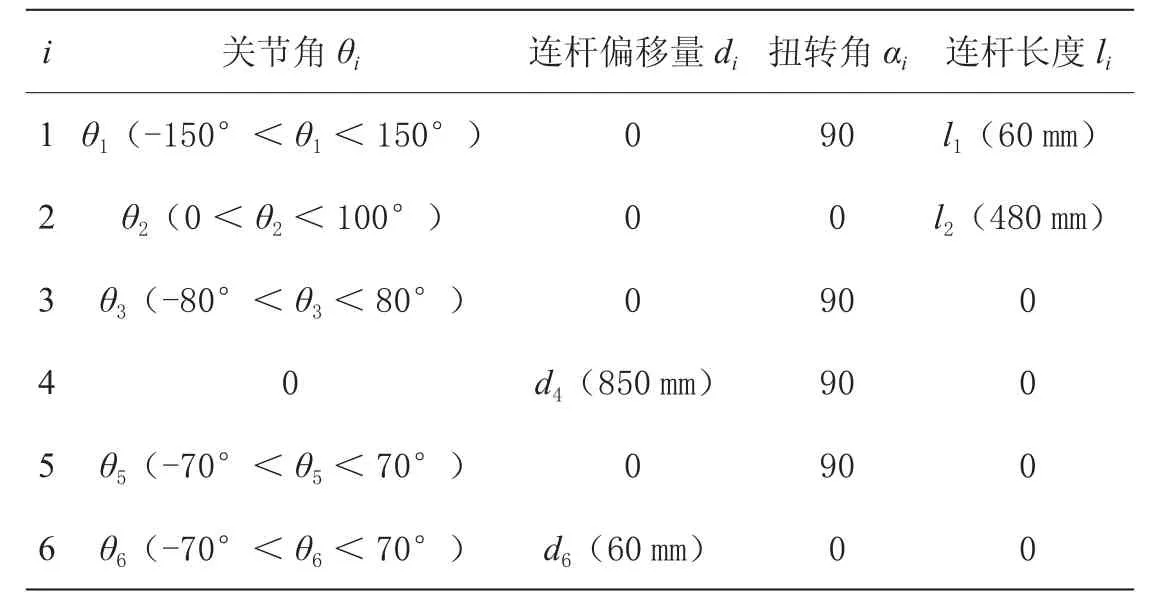
表1 操作臂D-H参数表
作者:韩训梅,三江学院机械工程学院专任教师、讲师,主要从事数控技术和机电一体化专业课程的教学与研究工作(210012)。
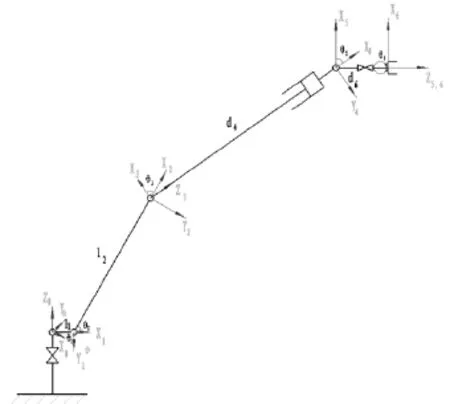
图3 操作臂坐标系建立示意图
3 运动学的正解
根据所建坐标系和操作臂各关节运动范围,可得到操作臂D-H参数如表1所示。
由表1可以得到操作臂各个关节之间的连杆变换矩阵如下:

可得操作臂的坐标转换矩阵:

式中:
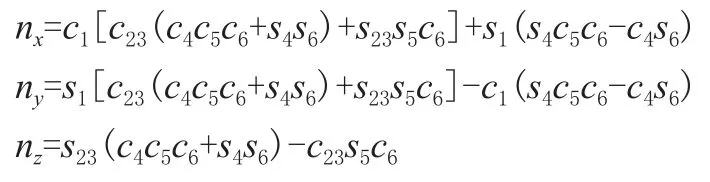
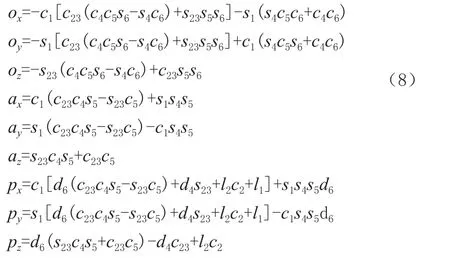
其中:

式7~式9即是操作臂的变换矩阵,描述了末端腕关节坐标系{6}相对于腰关节基准坐标系{0}的位姿,这是操作臂运动学的正解分析。
4 运动学仿真分析
根据上面得到的操作臂运动学正解的结果,下面借助ADAMS软件对该操作臂进行运动学仿真。首先,将通过SolidWorks构建的操作臂的模型导入到软件ADAMS/View中;其次,对其各构成部件的属性和部件元素的属性进行编辑;再次,根据实际运动情况添加约束和驱动,即生成完备模型[3],如图4所示;最后进行运动学软件的仿真,生成仿真曲线,如图5~图12所示。
通过分析各关节角加速度和角速度曲线,可知各关节均正常运行,操作臂运行轨迹光滑,速度和加速度平稳。从图中的加速度曲线可知,在启动和停止阶段,小臂伸缩、俯仰关节,大臂俯仰关节和云台的旋转关节的加速度都有比较大的变化。开始时,加速度从零到最大值;结束时,加速度从最大值降到零。在中间运行阶段,角加速基本保持平稳,大致呈线性变化。由于考虑了重力,各关节的角加速度是重力和驱动力矩共同作用的结果。
从各关节所受的力和力矩曲线可看出,各关节驱动力矩变化平稳,没有冲击现象。
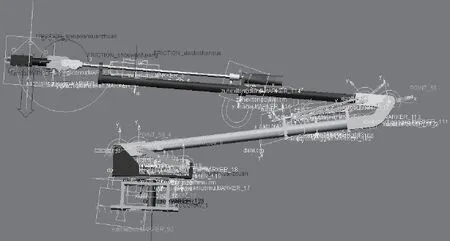
图4 操作臂定义约束后模型
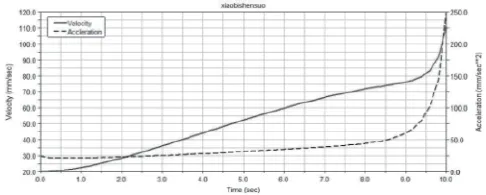
图5 小臂伸缩关节速度、加速度图
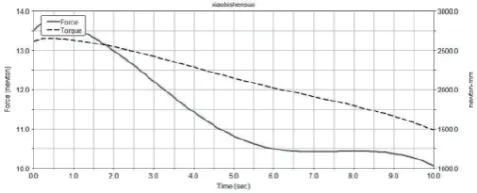
图6 小臂伸缩关节受力、力矩图
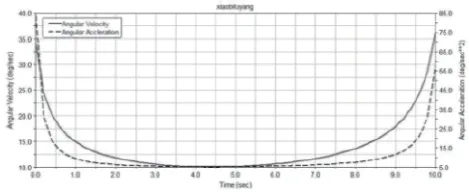
图7 小臂俯仰关节速度、加速度图
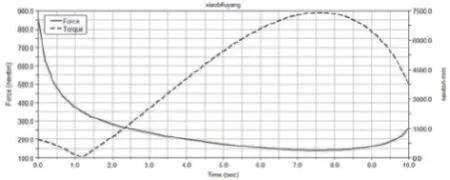
图8 小臂俯仰关节受力、力矩图
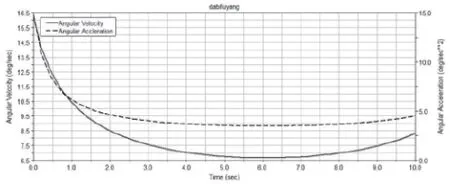
图9 大臂俯仰关节速度、加速度图
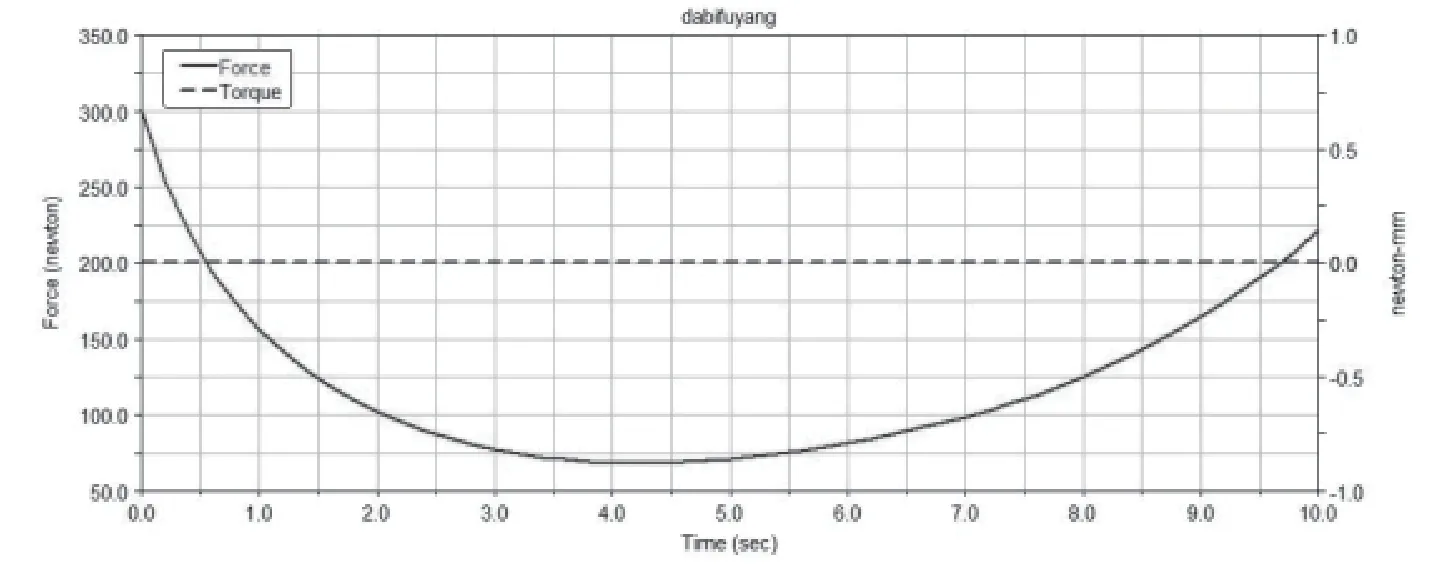
图10 大臂俯仰关节受力、力矩图
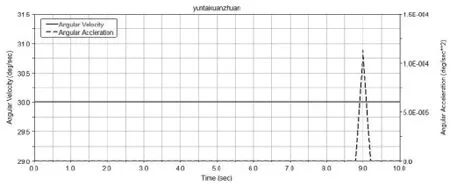
图11 云台旋转关节速度、加速度图
综合以上两点可知,操作臂各关节的运动是比较平稳的,无剧烈振动,符合之前的理论分析。
5 结语
本文使用D-H建立了操作臂各关节坐标系,并求解出操作臂的位姿正解方程,后又借助ADAMS软件对操作臂进行具体运动的仿真分析,最后结合作业过程中的一般抓取物体的实例,获得操作臂各关节电机力矩的变化规律,以及角加速度、角速度的变化规律,为样机设计中电机的优化选择提供了依据,同时也为机器人教学创建了相应的分析实例。■
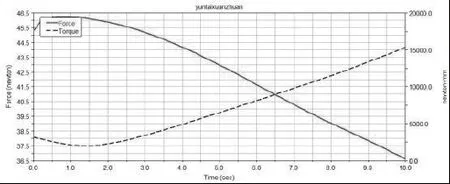
图12 云台旋转关节受力、力矩图
[1]刘金国,等.灾难救援机器人研究现状、关键性能及展望[J].机械工程学报,2006,42(12):1-12.
[2]刘海江,姜冬冬,张春伟.采用ADAMS的五自由度抛光机械手仿真分析[J].现代制造工程,2010(12):50-53.
[3]曹俊琴.一种基于思维进化算法的神经网络求解机器人逆运动学问题[D].太原:太原理工大学,2005:4.
[4]张艳丽.基于ADAMS的关节型机器人正运动学分析与仿真[J].沈阳航空工业学院学报,2009(4):31-33.
Forward Kinematic Analysis and Simulation of a Rescue Robot Manipulator//HAN Xunmei
Rescue robot is a hot topic in the fi eld of robotics research. It is commonly used wheeled or tracked vehicle body installation of the operating arm of the structure. The robot can be remote semiautonomous or autonomous operation, widely used in a variety of dangerous rescue situations. According to the requirements of the operating environment characteristics and job tasks, in combination with the self-developed rescue robot, kinematics, and trajectory planning and simulation of the operating arm mounted on a mobile platform is carried.
rescue robot; manipulator; kinematics
TP242.6
B
1671-489X(2016)12-0036-05
