基于改进Kaze特征匹配的低分辨人脸识别算法
2016-08-17刘本永
傅 敏, 刘本永
(1.贵州大学 计算机科学与技术学院,贵州 贵阳 550025;2.贵州大学 大数据与信息工程学院,贵州 贵阳 550025;3.贵州大学 智能信息处理研究所,贵州 贵阳 550025)
基于改进Kaze特征匹配的低分辨人脸识别算法
傅敏1, 刘本永2,3*
(1.贵州大学 计算机科学与技术学院,贵州 贵阳 550025;2.贵州大学 大数据与信息工程学院,贵州 贵阳 550025;3.贵州大学 智能信息处理研究所,贵州 贵阳 550025)
针对普通算法难以提取低分辨人脸图像特征以实现人脸识别问题,探讨一种基于改进Kaze特征匹配的识别算法。首先,通过改进P-M扩散滤波中阈值和扩散函数来保留低分辨图像的边缘和细节,并利用加性算子分裂算法构造非线性尺度空间;其次,通过寻找不同尺度归一化后的 Hessian 矩阵局部极大值点来检测特征点,并使用 M-SURF构造特征描述向量;最后,利用欧式距离进行特征向量的匹配实现识别分类。实验结果表明,与基于SIFT、SURF和普通Kaze特征匹配的算法相比,所探讨算法正确识别率更高,同时对噪声图像也有更好的鲁棒性。
低分辨人脸识别; P-M扩散滤波;Kaze特征
随着监控摄像头的广泛应用,人脸识别系统的市场需求也在逐渐扩大,从应用于银行和超市等场所的小范围单摄像头识别,到覆盖于机场和街道等场所的大范围多摄像头闭路电视识别,人脸识别应用无处不在。在这些情形中,由于被监控的人群距离监控摄像头一般较远,导致被检测到的人脸区域分辨率较低,因此现实的人脸识别系统首先需要解决低分辨人脸图像带来的检测与识别性能下降的问题。
传统方法中,解决低分辨率人脸识别问题可以先对低分辨率图像进行超分辨得到高分辨率图像,然后再进行识别,如人脸幻想[1]、多模态张量超分辨率增强[2]等,但是大部分超分辨算法只是从视觉效果上来对低分辨图像处理,并没有考虑识别性能,导致超分辨后的图像在识别时并没有提高识别率,有时,反而会降低识别率。所以最近几年,研究人员提出在低分辨率下稳健特征提取的方法,其原理是直接从低分辨率人脸图像上提取有鉴别性的特征信息,代表性的方法包括局部频域描述子[3]、耦合局部保持映射[4]等。
由于低分辨人脸图像的边缘和细节部分很少,所以通过高斯模糊建立多尺度空间来提取SIFT[5](Scale-invarirant feature transform)、SURF[6](Speeded up Robust Features)等特征的办法存在着特征提取困难、特征鲁棒性差等问题。所以,本文在构建多尺度空间时,采取改进的P-M扩散滤波[7]对原图像进行模糊来保持低分辨图像的边缘和细节,再在尺度空间中提取Kaze 特征[8]进行匹配,实现低分辨人脸识别。实验表明,与SIFT、SURF、传统Kaze算法相比,本文算法具有更高的识别率。
1 Kaze特征提取原理
1.1非线性尺度空间构建
1.1.1P-M扩散滤波
P-M扩散滤波的思想就是在尺度区域内进行平滑,而在尺度区域与尺度区域之间即边缘或边界处减少多余的平滑甚至不平滑。与高斯模糊不同的是,P-M扩散滤波考虑了图像的局部梯度信息,根据梯度的信息对不同的区域进行不同程度的平滑。从某种程度上来说,P-M算法对图像的边缘进行了“增强”。在P-M算法中,边缘采用常用的梯度微分算子来识别,P-M滤波可以下面通过偏微分方程来描述:

(1)
常见的扩散函数如下:
(2)
(3)
1.1.2AOS算法
由于非线性偏微分方程并没有解析解,一般通过数值分析的方法进行迭代求解。传统上采用显式差分格式的求解方法只能采用小步长,收敛缓慢。为此,我们把方程改为隐式差分格式, 采用加性算子分裂(Additive operator splitting)[9]算法求解。首先,将方程离散化为以下的隐式差分格式:
(4)

(5)
然后取两个结果的平均值即为t+1尺度空间下的图像。
对于一幅低分辨人脸图像,Kaze特征提取时首先对图像进行高斯卷积,以降低噪声,然后计算图像的梯度直方图来确定非线性扩散方程中的扩散级别对比度参数,然后根据一组进化时间,利用加性算子分裂算法即可得到非线性尺度空间的所有图像。
1.2特征点的检测与主方向的确定
1.2.1特征点的检测
Kaze的特征点检测与SURF特征点检测类似,是通过寻找不同尺度归一化后的Hessian局部极大值点来实现。Hessian矩阵的计算如下:
(6)
其中f(x,y)表示一幅图像,然后求该矩阵的判别式作为t尺度空间下某点的特征点。
(7)
在查找极值点时,每一点都要和所有相邻的点进行比较,只有当它大于它的图像域和尺度域上所有相邻点时,它才是极值点。
1.2.2特征点主方向确定
首先对特征点所有邻点的一阶微分值进行高斯加权,再将这些微分值视作向量空间中的点集在一个角度为60°的扇形滑动窗口内对点集进行向量叠加,最后对整个圆进行搜索,找到的最长向量的角度即为主方向。
1.3特征向量的构造与匹配
Kaze算法中采用M-SURF[10]来构造特征向量。在梯度图像上以特征点为中心取一个24σi×24σi的窗口,并将窗口划分为4×4个子区域,然后计算出长度为4的子区域描述向量:
dv=(∑Lx,∑Ly,|∑Lx|,|∑Ly|)
(8)
然后, 每一个子区向量以特征点为中心,再通过另一个大小为4×4的高斯窗口对每个子区域的描述向量进行加权,最后进行归一化处理。这样就得到了4×4×4=64维的描述向量。特征向量的匹配是通过计算两幅图像特征点描述向量的相似性来判定的,Kaze算法中利用两个特征向量间的欧式距离d做相似性判断。
2 改进的Kaze算法
对于低分辨人脸识别中的应用来说,传统Kaze算法存在以下的缺陷和局限性:
(1)在Kaze算法的非线性尺度空间构造中,选用一般阈值对图像进行P-M扩散时存在特征点少、识别效果并不佳等问题。
(2)P-M扩散模型常常不能够有效地消除小尺度区域的噪声,遇到噪声点反而会产生“噪声边缘的情况”。所以在对各向异性扩散滤波使用时,不仅要考虑对图像的增强,还要考虑对噪声点的抑制。
2.1阈值的改进
在Kaze特征中,在选用一般阈值对低分辨图像处理时,会导致处理过后的人脸图像有时提取不到特征点。灰度平均梯度就是用来描述图像的边界附近灰度的变化差异[11]。它不仅可以用于评价图像的清晰程度,还可以反映图像微小细节反差变化以及纹理特征。其计算公式如下:
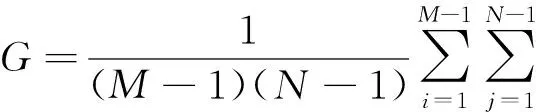
(9)
所以,我们运用图像的平均梯度来调整阈值K的值,使扩散阈值和图像的平均梯度成正比关系。对于平均梯度大的图像我们增大阈值,反之,则减少阈值。调整之后,取得了更好的效果。
而且随着扩散的进行,图像的灰度平均梯度逐渐下降,如果使阀值K随着图像的平均梯度的减少而减少,这样更能够保持图像边缘,增加识别的正确率。
2.2扩散函数的改进
对于给定的扩散函数g,如g=1/((▽L/K)+1)来说,当梯度较小时,即▽L/K<1时,这时的扩散方程如同低通滤波一样进行平滑;当梯度较大,即▽L/K>=1时,这时的扩散方程的扩散将变得很慢。所以我们针对扩散的特点做如下改进:
(1)当|▽L/K|<1时,即为梯度小的区域,我们根据图像的噪声系数来增大阈值K,加快平滑区域的扩散速度值达到对噪声的抑制。
(2)当|▽L/K|>=1时,我们仍采用原有的扩散系数。
于是算法在保持边缘的同时对噪声点的去除效果更好。
3 实验结果
实验采用FERET人脸库。用Kaze,SIFT,SURF,与本文算法做对比实验(见表1)。
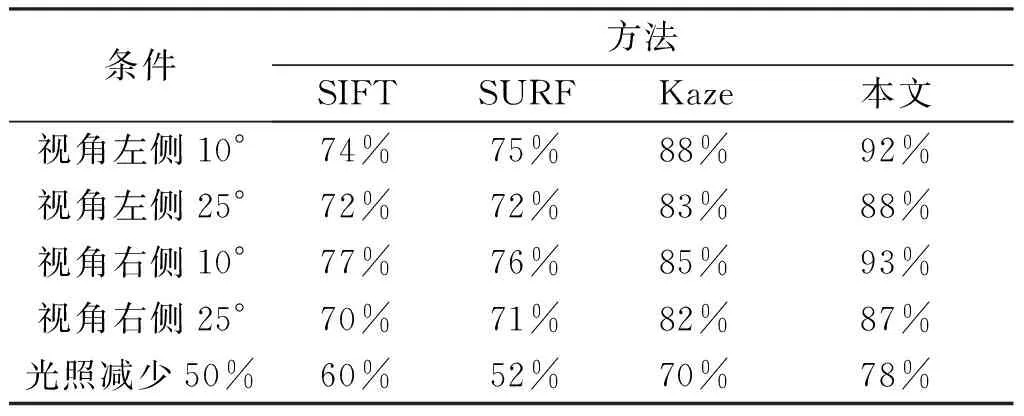
表1 不同条件下各算法正确识别率
从表1中实验结果,SIFT和SURF识别率相对较低,Kaze 算法在旋转和光照的条件下,有更好的识别率。本文算法在Kaze算法的基础上,进一步提高了识别率。
对FERET人脸库的正脸添加不同程度的高斯噪声,信噪比分别为6 dB,9 dB,12 dB,15 dB。然后和正脸做匹配。实验结果如图1所示。由于SURF特征在加入噪声之后几乎找不到特征点,所以未给出实验结果。实验表明,本文算法比SIFT和传统Kaze算法有更好的识别率。

图1 不同高斯噪声程度下各算法识别率
随机选取FERET人脸库中的50个人,每人选取六张人脸图像,分别是视角左侧25°、左侧10°、右侧10°、右侧25°,减少光照强度50%和添加信噪比为15 dB的噪声。与正脸来进行实验。计算出50个人的平均匹配特征点数量。实验结果如图2所示:
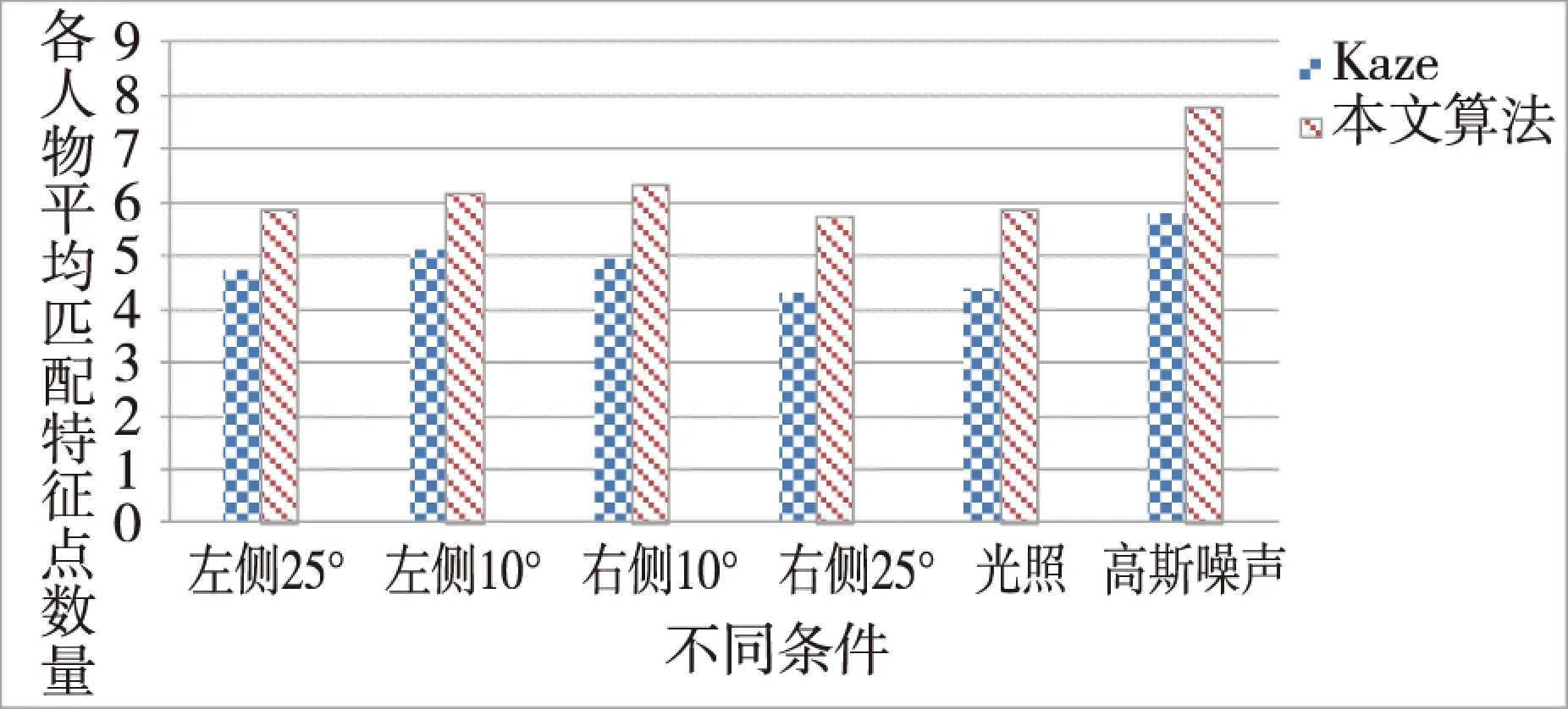
图2 不同条件下平均匹配特征点数量对比
由特征点匹配对比实验可知,改进后的Kaze算法能在人脸中提取到更多、更稳定的特征点,特别是在边缘不突出的人脸中,Kaze 算法提取不到匹配的特征点,但本文算法能在这些人脸图像中提取到特征点。
4 总结
本文在传统Kaze特征提取的基础上,提出了一种改进算法:利用灰度平均梯度对Kaze特征提取中的P-M扩散滤波的阈值进行了优化,同时改进了P-M扩散滤波中的扩散函数。实验表明,提出的改进的Kaze算法提高了识别率和增强了对噪声的鲁棒性。
[1] Baker S Kanade T. Hallucinating faces[C]//The Fourth IEEE International Conference on Automatic Face and Gesture Recognition. IEEE, 2000: 83-88.
[2] Jia K, Gong S. Multi-modal tensor face for simultaneous super-resolution and recognition[C]// ICCV 2005. Tenth IEEE International Conference on Computer Vision,2005, 2: 1683-1690.
[3] Biswas S, Bowyer K W, Flynn P J. Multidimensional scaling for matching low-resolution face images[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(10): 2019-2030.
[4] Li B, Chang H, Shan S, et al. Low-resolution face recognition via coupled locality preserving mappings[J]. Signal Processing Letters, IEEE, 2010, 17(1): 20-23.
[5] Lowe D G. Distinctive image features from scale-invariant keypoints[J].International journal of computer vision, 2004, 60(2): 91-110.
[6] Bay H, Tuytelaars T, Van Gool L. Surf: Speeded up robust features[C]//Computer vision-ECCV 2006, Springer Berlin Heidelberg, 2006: 404-417.
[7] Perona P, Malik J. Scale-space and edge detection using anisotropic diffusion[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 1990, 12(7): 629-639.
[8] Alcantarilla P F, Bartoli A, Davison A J. KAZE features[C]//Computer Vision-ECCV 2012, Springer Berlin Heidelberg, 2012: 214-227.
[9] Weickert J, Romeny B M T H, Viergever M. Efficient and reliable schemes for nonlinear diffusion filtering[J].IEEE Transactions on Image Processing, 1998, 7(3): 398-410.
[10]Agrawal M, Konolige K, Blas M R. Censure: Center surround extremas for realtime feature detection and matching[C]//Computer Vision-ECCV 2008,Springer Berlin Heidelberg, 2008: 102-115.
[11]赵青, 何建华, 温鹏. 基于平均梯度和方向对比度的图像融合方法[J]. 计算机工程与应用, 2012, 48(24): 165-168.
(责任编辑:曾晶)
Low Resolution Face Recognition Based on Improved Kaze Feature Matching Algorithm
FU Min1, LIU Benyong2,3*
(1.College of Computer Science and Technology, Guizhou University, Guiyang 550025,China;2.College of Big Data and Information Engineering, Guizhou University, Guiyang 550025,China;3. Institute of Intelligent Information Processing, Guizhou University, Guiyang 550025,China)
The general algorithm has difficulty in extracting the low resolution face image feature, a recognition algorithm based on improved Kaze feature matching was explore to solve face recognition problem. First, low resolution image edges and details can be saved by improving threshold and diffusion function of P-M diffusion filtering and a nonlinear scale space was constructed by additive operator splitting algorithm. Then the feature points were detected by searching local maximum points of Hessian matrix by different scales normalization and the feature descriptors were constructed by M-SURF. At last, the recognition and classification were relied on matching of feature descriptors by Euclidean distance. Experiments show that the discussed algorithm has better rate of recognition comparing to feature matching algorithm based on SIFT, SURF and general Kaze. Meanwhile, the proposed algorithm has better robustness on noisy image.
low resolution face; P-M diffusion filtering; Kaze feature
A
1000-5269(2016)03-0102-04
10.15958/j.cnki.gdxbzrb.2016.03.24
2016-02-19
科技部国际合作项目(2009DFR10530)
傅敏(1991-),男,在读硕士,研究方向:模式识别与人工智能,Email:narcissist_fm@163.com.
刘本永,Email:byliu667200@163.com.
TP391.41