基于蒙特卡罗模拟的船体型线稳健优化设计
2016-08-16蒋国伟冯佰威常海超
蒋国伟,冯佰威,2,常海超,2
(1.武汉理工大学 交通学院,湖北 武汉 430063;2.高性能船舶技术教育部重点实验室,湖北 武汉 430063)
基于蒙特卡罗模拟的船体型线稳健优化设计
蒋国伟1,冯佰威1,2,常海超1,2
(1.武汉理工大学 交通学院,湖北 武汉 430063;2.高性能船舶技术教育部重点实验室,湖北 武汉 430063)
传统的船型优化仅考虑了确定性因素的影响,忽视了设计和使用中不确定性因素的存在,常导致船型方案不可行或航行性能较差。为了考虑不确定因素对船舶阻力性能的影响,在船型优化中引入稳健优化设计理论。首先,阐述了稳健优化设计的基本原理,在此基础上,以KCS船型为例,考虑了航速不确定性的影响,建立了稳健优化数学模型。其次,基于Isight平台完成了KCS船体型线稳健优化设计。试验结果表明:船体型线稳健优化设计可有效地减小船型方案失效的可能性,更符合工程实际。
船型优化;随机不确定性;稳健优化;兴波阻力
0 引言
船体型线优化是一种有效的船舶节能技术,而优化模型的建立则是船型优化的关键。目前,大多数船体型线优化模型是建立在确定性优化理论基础之上,在优化过程中,将设计变量作为确定性的量。而实际上,在船舶设计过程中,存在很多不确定性变量,例如由于生产精度导致船体参数达不到或者超过设计值;航行时会受到风、浪、流等因素的影响导致船舶的实际航速在设计航速附近波动等,这些不确定因素可能导致最优方案失效或者船舶性能达不到预定的设计目标。
目前,在船舶优化设计中考虑不确定因素的研究成果相对较少。江苏科技大学邵伟等[1]利用最小波动法对某4万t散货船的中横剖面结构进行了稳健优化设计。李冬琴等[2]在船舶设计优化中,考虑设计变量中航速和吃水的随机不确定性及计算参数垂线间长和总长的随机不确定性,以一艘平台辅助船为研究对象,构建了不确定性优化数学模型,实现了船舶多学科稳健优化设计。Diez M等[3]提出了一种考虑环境变量不确定性的散货船概念设计稳健优化方法,同时将期望值和方差作为优化目标,约束条件以最坏情况考虑,以单位运输成本的期望值和方差最小为目标对散货船进行了优化。
本文以某3 600 TEU集装箱船KCS为研究对象,考虑船舶在实际航行过程中航速不确定性的影响,通过降低船舶兴波阻力对航速的敏感度,使得优化后的方案不仅阻力有所下降,而且在设计航速附近阻力波动较小。
1 基于蒙特卡罗模拟法的稳健优化设计
基于蒙特卡罗模拟法的稳健优化设计方法是从统计学的角度出发,用概率模型来分析不确定因素对产品性能的影响,再依据概率分析方法来控制不确定性因素对产品性能的影响,获得满足产品性能、可靠性等各方面要求的设计方法[4]。在稳健优化设计中,通过改进设计变量的均值μ和均方差σ,能有效地降低产品性能对不确定因素的敏感度,提高产品的可靠度。
确定性优化解和不确定性优化解示意图如图1所示。从图1中可以看出,如果不考虑变量x的波动,以确定性优化的收敛标准判断,1点处目标函数最小,则1点为最优方案。如果考虑变量x在±Δx范围内波动时,目标函数f(x)在该点的变化量Δf1超出了约束界限,有可能导致设计方案失效。在2点处由于变量x的波动引起的目标响应的变化值Δf2虽然没有超出约束界限,但目标响应的波动依然较大,特别在2点左侧目标值会随着x的减小快速增大,该方案稳健性较差。3点处,在±Δx范围内,目标函数的变化值Δf3有了明显减小,稳健性有了提高,但目标响应的平均值变大了。可以看到,在3点右边可能存在目标响应波动更低的区域,但其响应的均值有可能超出了理想值。因此,在稳健优化过程中,要合理的权衡目标响应的均值和降低响应的波动这2个指标[5]。

1.目标最小值 2.可靠最优值 3.稳健最优值
典型的稳健性优化公式为:
minF(μ,σ)
s.t.Gj(μ,σ)≤0xL+Δx≤x≤xU-Δx
(1)
式中:x为设计变量;Gj为约束函数;j为约束函数的数量;XL为设计变量的下限;xU为设计变量的上限。
目标函数F可以进一步分解为2个部分,即“最小化性能波动”和“达到平均性能目标”,故稳健性设计目标公式为:
(2)
式中:n为目标响应的数量;i为目标响应Y的分量下标;μY为目标响应Y的均值;σY为目标响应Y的均方差;W1和W2分别为目标响应Y的均值μY和均方差σY的权重系数;S1和S2分别为Y的均值μY和均方差σY的归一化系数;Mi为期望达到的平均性能目标值[6]。
从式(2)中可以看到,均值和均方差的求解是稳健优化设计的核心。目前,蒙特卡罗模拟方法、矩阵法和解析法是应用较为广泛的求解方法[7],其中,蒙特卡罗模拟方法在概率特性评估方面被认为是最准确的方法,因此,本文采用该方法求解目标响应的均值和均方差。蒙特卡罗模拟技术(Monte Carlo Simulation,MCS)是利用抽样理论代替求解物理或者数学问题的一种方法[8]。MCS方法的原理为:如果已知不确定性因素R1、R2、R3服从的概率分布,对它们进行随机抽样,然后计算出所抽取样本点的目标响应,通过对响应结果的分析,可以估计目标响应Y1的概率分布特征(均值、均方差等)[4]。
蒙特卡罗模拟的稳健性分析主要分为两个步骤:一是抽样,抽样分为简单随机性抽样和描述性抽样,其中描述性抽样将每个随机变量的空间区域划分成相等的概率子空间,让每个随机变量的子空间与其他随机变量的子空间只结合1次,如图2所示,其中假设x1、x2均服从正态分布;二是统计计算[9]。

图2 描述性抽样示意
将抽样值代入式(3)、式(4),即可计算出目标函数的均值和均方差,计算公式如下:
(3)
(4)
式中:F为目标函数;xi为蒙特卡罗模拟样本;N为样本数;μ(F)和σ(F)为目标函数的均值和均方差[6]。
2 KCS船体型线特征参数稳健优化
以KCS船体型线为研究对象来验证文中提及方法的有效性,采用Friendship软件建立船体全参数化模型,基于Isight平台实现船体型线特征参数稳健优化设计。
2.1KCS船体曲面全参数化建模
要实现船体型线的自动优化,首先必须以较少的特征参数建立参数化的船体几何模型。通过船体参数化建模,可以将船体型线用有限的船体参数表达出来,通过控制这些参数来改变船体形状,对这些参数进行筛选处理后可作为船型优化的变量,是船型优化的基础性工作。
本研究中,利用参数化建模软件Friendship进行船体参数化建模。首先根据船型选择合适的船体特征参数,然后依据参数化设计技术,构建船体特征曲线,进而生成船体横剖面,最后采用“蒙面法”生成光顺曲面,即得到了船体参数化模型[10]。其具体过程见文献[10]。
本文仅以船舯曲面建模为例简单解释其原理。首先必须要介绍FSpline曲线,它是一种经过光顺处理的B样条曲线,是Friendship船型参数化建模中很重要的一种曲线。该曲线可以由曲线起点坐标、终点坐标、起点切角、终点切角、曲线与坐标轴所围面积及所围面积区域的形心这6个参数来实现曲线的参数化表达。船舯横剖面可由一段底部直线(bottom)、舭部曲线(bilge)和舷侧直线段(side)组成,如图3所示,其相关参数含义见表1。其输入参数与特征曲线的对应关系如图4所示,例如D点Z坐标为甲板高度值,其对应的纵向曲线为甲板边线,C点Z坐标为舭部高度值,对应的纵向曲线为平边线等。然后采用“蒙面法”生成光顺曲面,可简单理解为横剖面沿着纵向曲线滑动,其扫过的曲面即为船体曲面。其中纵向曲线由FSpline曲线、直线或两者组合构成,可通过船体特征参数控制纵向曲线的变化,进而改变船体形状,即实现船体参数化,最终模型如图5所示。

图3 横剖面形状图

图4 输入参数与特征曲线对应关系

图5 KCS船体模型

表1 相关参数列表
2.2优化变量
本研究选择船体的舯前部为优化对象。由于球鼻艏对兴波阻力影响显著,选择球鼻艏的全部参数作为变量,共18个,控制外飘角曲线的参数3个,控制舯前部横剖面面积曲线的参数3个,控制水线形状的参数2个,其相应的变化范围见表2,变量控制部位如图6所示。

表2 设计变量定义

图6 变量控制部位
2.3优化目标及约束条件
船舶在实际航行过程中,由于受到风、浪、流等因素的影响导致船舶的实际航速不会刚好是设计航速,而是在设计航速附近一定范围内围绕设计航速波动,在稳健优化中,近似认为它服从正态分布。
考虑船舶在实际航行中航速的波动,在CFD计算中,航速的改变通过改变傅氏数实现,其具体表达式为[11]:
Fractural=Frdesign+fr
(5)
式中:Fractural为实际傅氏数;Frdesign为设计傅氏数,Frdesign=0.26;fr为服从均值0、方差0.008的正态分布的不确定性变量。
本研究在考虑航速波动情况下,以减小船舶兴波阻力系数的均值及均方差为目标进行优化。由于船体舯前部型线对于兴波阻力影响显著,因此本文重点对该区域线型进行优化。
约束条件满足如下要求:
(1)排水量上下浮动小于1%。
(2)浮心纵向位置前后浮动小于1%。
该问题的确定性优化数学模型为:
minfobj

…
(6)
式中:fobj为优化目标函数,本文中指兴波阻力系数;x1,x2…x26为表2中26个设计变量;g1为排水量;g2为浮心纵向位置;带“l”上标的为参数下限值;带“u”上标的为参数上限值。
相应的稳健优化数学模型为:
…
(7)
式中:W1和W2分别为兴波阻力系数的平均值μ(fobj)和均方差σ(fobj)的权重系数,W1=W2=1;S1和S2分别为Y的平均值μ(fobj)和均方差σ(fobj)的归一化系数,S1=1,S2=0.001。
在上述稳健优化数学模型中,由于约束条件(浮心纵向位置和排水量)对航速并不敏感,不会发生由于航速的波动导致超出约束条件,所以并没有如式(1)中对约束条件进行调整,保持原约束条件不变。
2.4优化过程
整个优化过程在Isight集成平台上实现,具体的流程如图7所示。
(1)建立船体全参数化模型,使之可以通过改变船体特征参数来实现船型的变化。
(2)利用CFD-Shipflow进行计算,算出当前船型的兴波阻力系数。
(3)假定傅氏数服从均值0、方差0.04的正态分布,利用蒙特卡罗模拟技术对傅氏数进行取样,并对每个样本点进行CFD计算,将结果代入式(3)、式(4),计算出目标函数的均值及均方差。
(4)判断是否满足稳健优化准则,不满足则按优化算法修改船型的特征参数,得到新船型后再次计算,直到满足优化准则,输出船体特征参数稳健优化组合。

图7 优化过程流程图
2.5结果分析
确定性优化和稳健优化均采用遗传算法NSGAⅡ作为优化算法,设计的优化种群数为50个,遗传代数为20代,变异率为0.01,交叉率为0.9,优化结果见表3。确定性优化以兴波阻力系数最小为目标,其优化数学模型见式(6)。初始设计和确定性优化方案的均值及方差均是假设傅氏数满足同样正态分布,通过蒙特卡罗模拟得到。确定性优化前后波形及船体型线对比如图8、图9所示,稳健优化前后波形及船体型线对比如图10、图11所示。图8、图10的纵向波切图中,横坐标为波高所在纵向位置,船首为0,船尾为1,纵坐标为波高值,均通过船长L进行无因次化。

表3 优化结果
通过优化前后性能指标的对比发现,确定性优化后浮心纵向位置略微后移,兴波阻力系数降低了9.58%。图8表明优化船型的艏部波峰峰值比母型船有所降低,船体中后部波形基本相同,优化船型的自由液面波形较母型船有所简化,从而降低了兴波阻力。对比确定性优化前后船体型线可以发现,优化船型球艏形状有一定变大且明显上翘的趋势,其图形如图9所示。

图8 确定性优化前后波形轮廓图、纵向波切图对比

图9 确定性优化前后型线对比
对比稳健优化前后船体型线可以发现,稳健优化方案与确定性优化方案的船型变化趋势是一致的,球鼻艏形状均有上翘的趋势,稳健优化方案兴波阻力系数降低了7.46%,较确定性优化结果稍差。同样,稳健优化后船体艏部波峰峰值较母型船有所降低,船体中后部波形基本相同,优化船型兴波波形较母型船有所简化,与确定性优化结果一致。
从表3可以看出,稳健优化方案的兴波阻力系数均值虽然比确定性优化方案稍大,但是其均方差明显降低,说明稳健优化方案兴波阻力的波动性更小。当船舶航速产生波动时,阻力性能不会有剧烈的变化,一直保持较为良好的阻力性能。为验证船体型线特征参数稳健优化设计的效果,对比优化前后船舶兴波阻力随航速变化的情况,并进行分析。不同傅氏数下的兴波阻力如图12所示。
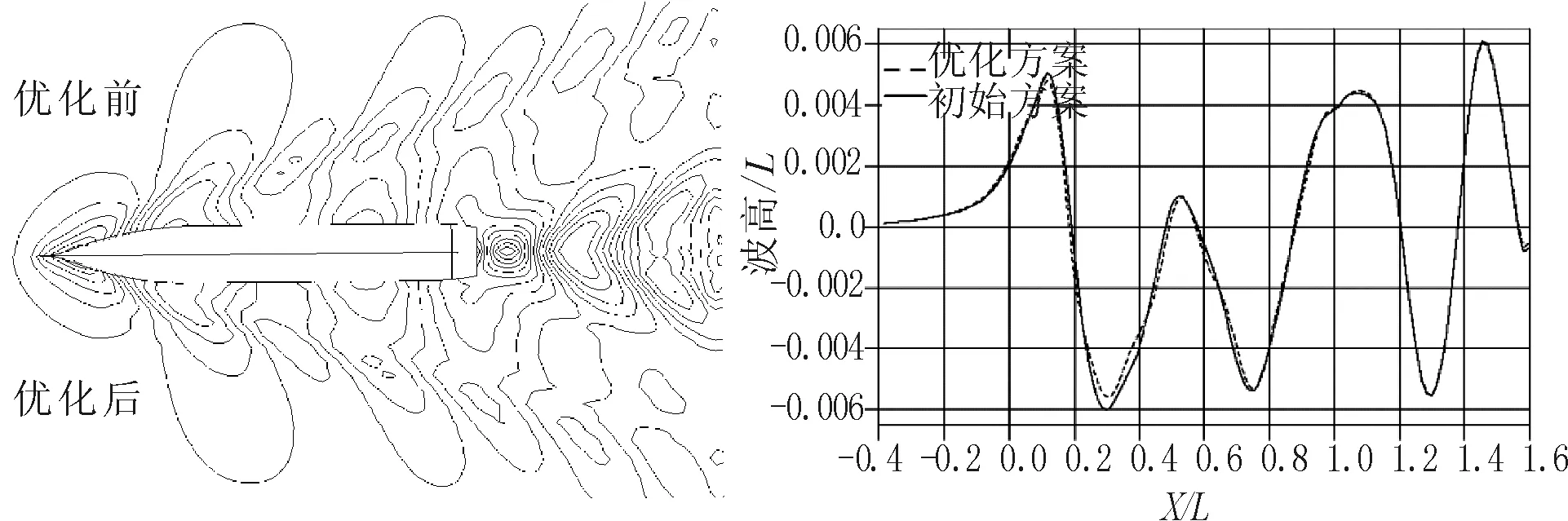
图10 稳健优化前后波形轮廓图、纵向波切图对比

图11 稳健优化前后型线对比

图12 不同傅氏数下的兴波阻力
从图12可知,稳健优化方案在相同航速下的船舶兴波阻力均比初始方案要小,且在整个速度范围内波动幅度比初始方案及确定性优化方案小。上述分析说明,采用稳健优化设计得到的船型能够在有效降低船舶阻力的同时,减小了阻力性能的波动,防止由于航速波动导致阻力性能恶化,使得优化方案失效,保证了船型优化的有效性。
3 结论
在船型优化过程中引入设计变量中的不确定性因素,运用基于蒙特卡罗模拟法的稳健优化设计方法,对KCS船进行了船体型线特征参数稳健优化设计研究,得到以下几点结论:
(1)实际船型优化设计中存在各种不确定性因素,这些因素的波动会使得船型优化方案出现偏差甚至失效。因此,将稳健优化设计方法引入到船型优化中,对提高船型优化的工程实用性具有重要的研究意义。
(2)以KCS船为研究对象,考虑船舶在实际航行中存在的不确定性因素,应用基于蒙特卡罗模拟的稳健优化方法,得到的船型方案不仅优于母型船,而且与传统确定性优化结果相比,方案的稳健性得到较大提高,保证了船型优化的有效性,证明了该优化方法在船型优化中的适用性。
[1]邵伟. 基于鲁棒性的船舶结构优化设计研究[D]. 镇江:江苏科技大学, 2012.
[2]李冬琴, 蒋志勇, 赵欣. 多维随机不确定性下的船舶多学科稳健设计优化研究[J]. 船舶工程, 2015, 37(11):61-66.
[3]Diez M, Peri D. Robust optimization for ship conceptual design[J]. Ocean Engineering, 2010, 37(11): 966-977.
[4]赖宇阳.Isight参数优化理论与实例详解[M].北京:北京航空航天大学出版社,2012.
[5]孙光永, 李光耀, 陈涛, 等. 基于 6σ 的稳健优化设计在薄板冲压成形中的应用[J]. 机械工程学报, 2008, 44(11): 248-254.
[6]王婷. 高速客车轴箱悬挂参数稳健优化设计[D]. 长沙:中南大学, 2014.
[7]李玉强, 崔振山, 陈军, 等. 基于响应面模型的 6σ 稳健设计方法[J]. 上海交通大学学报, 2006, 40(2): 201-205.
[8]Nedjalkov M, Kosina H, Selberherr S. Monte Carlo algorithms for stationary device simulations[J]. Mathematics and Computers in Simulation, 2003, 62(3): 453-461.
[9]Yang R J, Gu L. Application of descriptive sampling and metamodeling methods for optimal design and robustness of vehicle structures[J]. AIAA, 2002, 1(321): 1-7.
[10]胡春平. 基于 Friendship 的船体型线优化技术研究[D]. 武汉: 武汉理工大学, 2012.
[11]Hannapel S E. Development of multidisciplinary design optimization algorithms for ship design under uncertainty[D]. Ann Arbor:The University of Michigan, 2012.
2016-03-12
国家自然科学基金项目(51279147, L1422029)
蒋国伟(1992—),男,硕士研究生,从事船舶多学科设计优化技术研究;冯佰威(1974—),男,副教授,从事计算机辅助船舶设计、船舶多学科设计优化技术研究;常海超(1985—),男,讲师,从事船舶多学科设计优化技术研究。
U662.2
A