基于GPS定位的四旋翼飞行器设计
2016-08-15王鹏冯帅余昌乐许童羽
王鹏 冯帅 余昌乐 许童羽

摘要:设计基于微控制器STM32F4系列和GPS定位的新型农情监测平台,以微控制器STM32F407为控制核心,用GPS模组、陀螺仪、加速度计等多种传感器测算位置和姿态信息。硬件由飞行控制器、数传模组、动力系统、机架、云台伺服系统组成。软件则采用简洁稳定的四元数加互补滤波姿态解算算法,融入PID控制算法,实现稳定飞行、GPS定位等功能。四旋翼飞行器扩展性高、适应性强,能够适应各种复杂环境,在农情信息采集中具有较高的应用价值。
关键词:四旋翼飞行器;GPS定位;STM32F4;四元数算法;农情信息采集
中图分类号:TP242.6 文献标识码:A 文章编号:1674-1161(2016)05-0027-03
随着传感器技术的突破和GPS在民用控制系统中的广泛应用,微型飞行器系统得到了长足发展,四旋翼飞行器成为国内外研究热点。四旋翼飞行器是微型机电系统的集成产物,特别适合在近地面环境(如旷野、城区和林场等)中执行测绘等任务,具有广阔的应用前景。四旋翼飞行器不但具有直升机垂直升降的飞行性能,而且在一定程度上降低了飞行器机械结构的设计难度。四旋翼飞行器的优势为:在制作过程中,对整体机身的中心、对称性及电机性能要求较低。
1 系统硬件方案
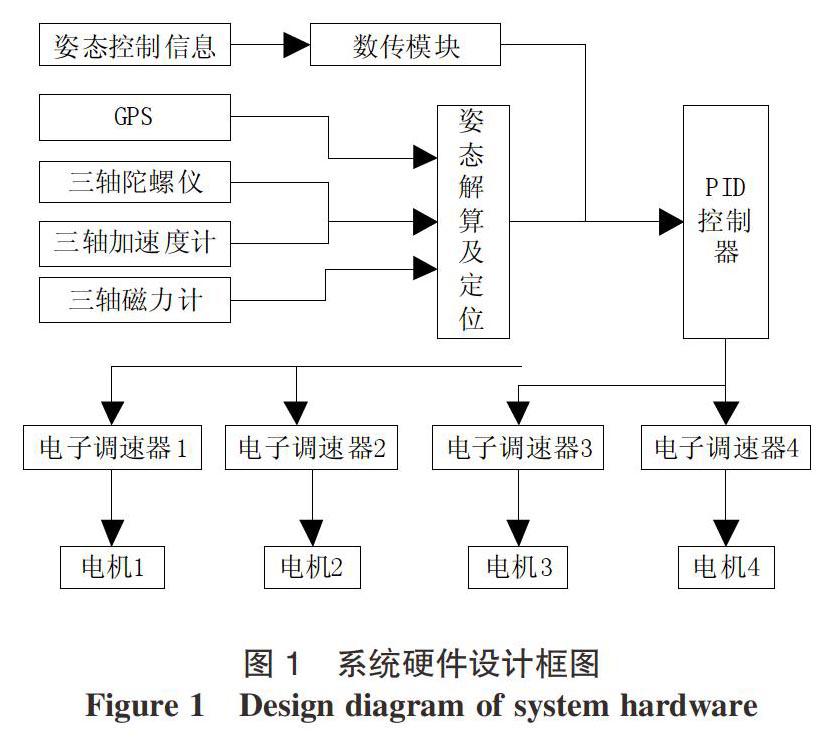
本设计采用STM32F4作为核心控制器,该微控制器(MCU)内核是ARM Cortex-M4架构,具有高性能、低功耗、低成本等特点。飞行控制器包括NEO-6M型GPS定位模组、姿态传感器MPU6050型模块、无线数传模块、无刷直流电机调速器、电源管理模组、遥控器(使用商品遥控)及接收机。MCU捕获接收机的PPM信号后,传感器与MCU采用IIC总线实现数据通信,MCU使用PWM信号控制电子调速器间接控制电机转速。软件算法采用四元数和互补滤波算法解算姿态信息,控制算法采用经典PID控制器控制四旋翼稳定飞行和云台舵机。系统硬件如图1所示。
2 传感器数据处理
2.1 GPS定位数据解析
ATK-NEO-6M模块是ALIENTEK公司生产的一款高性能GPS模块,核心采用UBLOX公司的NEO-6M模组,具有50个通道,追踪灵敏度高达161 dBm,测量输出频率最高5 Hz。ATK-NEO-6M模块自带高性能无源陶瓷天线,兼容3.3 V和5.0 V单片机系统,并自带可充电后备电池(支持温启动或热启动)。另外,模块自带一个状态指示灯——PPS。该指示灯连接在UBLOX NEO-6M模组的TIMEPULSE端口,该端口的输出特性可以通过程序设置。PPS指示灯可判断模块的当前状态。在默认条件下有2种状态:常亮表示模块已开始工作,但还未实现定位;闪烁(100 ms灭,900 ms亮),表示模块已经定位成功。
2.2 姿态解算
MPU6050是InvenSense公司的六轴运动处理组件,如图2所示。相较于多组件方案,免除了组合陀螺仪与加速度计之间的时间差问题。MPU6050内部整合三轴陀螺仪、三轴加速度传感器及一个IIC接口,可用于连接外部地磁传感器,利用自带的数字运动处理器(Digital Motion Processor,DMP)硬件加速引擎,通过主IIC接口向应用端输出完整的9轴融合演算数据。
四旋翼飞行器系统是一个时变且非线性系统,采用传统PID算法的单一反馈控制,存在不同程度的超调和振荡现象,无法得到理想的控制效果。将前馈控制引入飞行器系统控制中,能有效改善系统实时性,提高反应速度。根据四旋翼飞行器系统的特点,引入微分先行环节,改善系统动态特性,控制器能更好地适应四旋翼飞行器系统的实际情况。
软件设计由STM32F4读取传感器信息、解算姿态角,以姿态角为被控制量融合遥控参量后,输出PWM控制信号到动力系统及2个舵机,实现四旋翼飞行控制和云台稳定补偿。程序流程如图3所示。
3 控制设计
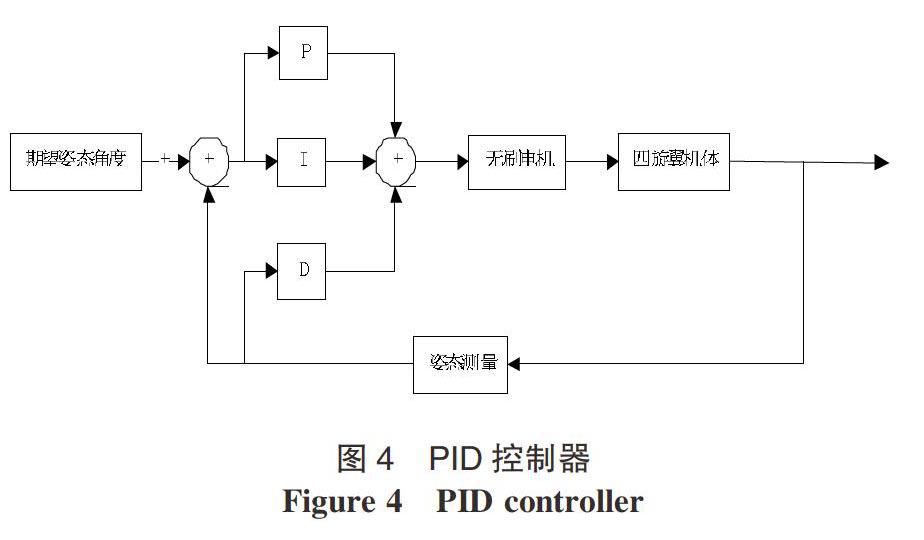
四旋翼飞行器结构对称,俯仰角与横滚角的控制特性基本相同,且相对独立。四旋翼飞行器的俯仰、横滚、偏航、升降可通过4个输入量来控制。通过设定期望角度调整电机转速,使姿态角稳定在期望角。控制策略设计为闭环控制,以姿态角做为被控制量,并应用经典PID控制算法。
在姿态角控制中,将控制器捕获到的遥控器控制信号转换为期望角,与解算的测量角作差设为error。将error乘以一个比例系数kp。只有kp作用时系统存在静差,利用积分ki控制消除稳态误差。积分控制可降低系统的动态性能,甚至造成闭环系统不稳定,因此要对积分进行限幅,防止积分过大。
若采用传统的微分方法微分,在人为操纵飞行器时会造成输入设定值变化频繁且幅度较大,易导致系统振荡。为解决以上问题,在姿态角控制过程引入微分先行PID算法,只对输出量即陀螺仪角速度测量值进行微分,而不对姿态角的设定值作微分。这样,在设定值发生变化时,输出量不会改变,被控量的变化也比较缓和,可明显改善系统动态性能。
将俯仰、横滚、航向控制量分别输入3个独立的PID控制器(如图4所示),得到3个PID输出:pid_roll,pid_pitch,pid_yaw。将这3个输出量作简单的线性运算并输出给电机。部分代码如下:
4 系统调试
4.1 姿态角调试
在完成控制器底层的硬件驱动后,进行姿态角算法调试。利用数传模块将解算出的姿态角数据发回上位机,摇动四轴机体,观察上位机数据曲线与姿态。
4.2 控制电机调试
针对四旋翼飞行器的PID算法,需要反复试验整定出最优参数。先整定单轴平衡参数,再整定另一轴,最后整体调节参数达到期望的平衡状态。为方便调试参数,设计如图5所示试验平台。
5 结论
本研究设计一种应用GPS定位的四旋翼飞行器,对其系统设计方案中相关硬件进行说明。给出飞行器姿态解算过程,介绍PID控制算法在姿态解算及其控制中的应用。采用高精度GPS模组改进GPS数据解析算法,实现更快速、精确定位。姿态算法采用基于四元数的互补滤波,姿态角无奇点,比起卡尔曼滤波等滤波算法,本研究的滤波算法有着计算量小的特点,节约CPU计算时间,对微处理器的性能要求低。该设计是基于GPS定位的新型农情监测平台,具有诸多优点,可垂直起降及机动性强,能够适应各类复杂环境,在农情信息采集中具有较高的应用价值。
参考文献
[1] 杨力,张帆,张峰.四旋翼飞行器动力控制系统研究与设计[J].科学技术与工程,2012(24):6087-6090.
[2] 李继宇,张铁民,彭孝东,等.四旋翼飞行器农田位置信息采集平台设计与实验[J].农业机械学报,2013(5):202-206.
[3] 王利民.基于无人机影像的农情遥感监测应用[J].农业工程学报,2013(9):136-145.
[4] 李俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报,2012(2):114-117.
[5] 王帅,魏国.在四旋翼无人飞行器姿态测量中的应用[J] .兵工自动化,2011(1):73-74.
Abstract: A new type agricultural condition inspection platform was designed based on micro controller STM32F4 seriesand GPS positioning. With the micro controller STM32F407 as the control core, GPS module, gyroscope, accelerometer and other sensors were used to measure the position and attitude information. The hardware consisted of flight controller, data transmission module, power system, frame, holder servo system. Software made the use of simple and stable quaternion plus complementary filtering algorithm, integrated into the PID control algorithmto achieve stable flight and GPS positioning and other functions. The quadrotor hadmany advantages, such as the expansion of high, strong adaptability and adapt to all kinds of complex environment, with the high application valuein the agricultural information collection.
Key words: quadrotor; GPS positoning; STM32F4; quaternion algorithm; agricultural information collection
