基于模糊神经网络的海面目标战术意图识别
2016-08-15任卿龙邱宇宁
陈 浩, 任卿龙, 滑 艺, 邱宇宁
(哈尔滨工业大学电子与信息工程学院, 黑龙江 哈尔滨 150001)
基于模糊神经网络的海面目标战术意图识别
陈浩, 任卿龙, 滑艺, 邱宇宁
(哈尔滨工业大学电子与信息工程学院, 黑龙江 哈尔滨 150001)
传统的基于遥感解译获取的海面目标信息分析战术意图的方法,需要大量的专家知识确定输入目标属性与输出意图间的网络节点关系,而模糊神经网络只需利用输入和输出训练网络,减少了专家知识的需求。针对常用的高木-关野模糊模型不适用于战术意图识别要求的输出与输入非线性的问题,设计了基于神经网络集成的模糊系统模型,利用目标属性与对应的战术意图形成训练样本训练神经网络,分别获得输入条件的模糊隶属度以及面向不同意图的输出函数,据此识别海面目标战术意图。仿真实验结果表明,获得的目标战术意图的准确度高,与想定情况均相符。
战术意图识别; 模糊神经网络; 模糊隶属度; 误差回传学习算法
0 引 言
现代战争的战场环境越来越复杂,能否准确、及时地结合参战的各方面力量的部署情况、外部环境条件等因素判断目标的战术意图,直接影响到指挥人员的指挥决策[1]。海面目标特性复杂多变,舰船是典型的海面目标,海面战场的目标通常以编队的形式出现,机动性较强,编队组成、队形、运动方向、运动范围都随着任务的不同而发生变化。目标的型号差异、所处编队类型的差异和目标所处的位置和机动类型,都会对目标的战术意图产生影响[2]。遥感技术是获取海面目标信息的有效途径,通过遥感图像,能够获得海面上目标的位置、队形、类型等属性信息,通过对这些信息的整合与分析,可以判断目标可能的进一步战术意图。
海面目标的战术意图,具有对抗性、动态性、稳定性、欺骗性等特征[3]。根据任务类型的差异,在不同的战时,目标会存在不同的战术目的,包括“显示存在”、“攻击”、“侦察”、“撤退”、“掩护”、“支援”等等,这些意图可能同时存在,但有所侧重。本文的研究基于单组海上舰船编队进行,因此没有考虑“掩护”、“支援”等意图。
然而,在实际判断中,随着海军作战样式的改变和各种远程攻击武器的使用,单独依靠敌方舰艇的机动来识别敌方的意图已经变得越来越困难[3]。多变的目标信息和相对较少的战时先验知识,不同意图之间相互交杂,都是海面目标战术意图识别时的困难所在。实际应用时,人工判断难以保证准确性和速度,而利用信息融合技术等可靠手段,能够有力保障我方作战部署和指挥。
信息融合技术是协同利用多源信息,对来自多个传感器的数据进行相互补充,以获得对同一事物和目标更本质认识的信息综合处理技术[4]。文献[5]和文献[6]使用的Dempster-Shafer(D-S)证据理论方法推断分析军事目标状态,文献[7-9]则利用贝叶斯网络预测和描述敌方战术意图,都取得了不错的结果及应用价值。上述方法比较依赖先验知识构建目标属性和意图之间的关系,例如,贝叶斯网络需要设定节点间的条件概率。若专家知识不足,意图将难以识别。而且,对于意图之间的模糊部分,如“攻击”与“突防”意图可能同时存在时,必然有目标主要的战术目的,这时存在的模糊部分利用这些方法很难表达。
模糊神经网络(fuzzy neural network,FNN)是神经网络与模糊逻辑的有机结合[10],在系统控制、状态预测、人工智能等领域应用广泛[11-13]。人工神经网络(artificial neural network,ANN)是目的在于模拟人类脑组织的结构及其功能的信息处理系统[14]。1986年McClelland和Rumelbart等提出的误差反向传播训练算法[15]大大推动了其发展。ANN在学习和自动模式识别等方面具有优势,能自适应地训练系统节点;而引入模糊系统则能够很有效地表示信息的模糊性与不确定性,使建立的系统模型更接近于实际。模糊神经网络常用的高木-关野模型(Takagi-Sugeno model,TSM)对输入空间的分割是线性的,系统的输出与输入条件也是线性关系。但是在目标战术意图的识别中,输入参数之间互相影响,输出的意图与输入并不是简单的线性关系。因此,为了适应目标战术意图识别的需求,需要对模型规则做出适当调整。
综上考虑基于遥感图像海上目标战术意图的需求和模糊神经网络的优势,本文提出了一种采用模糊神经网络进行海上目标战术意图分析的方法,首先设计了基于神经网络集成的模糊系统模型,利用目标属性与对应的战术意图形成训练样本进行训练,采用一个神经网络计算输入条件的模糊隶属函数,结合其他神经网络面向不同意图计算给出的输出结果,得到目标最终的战术意图。
1 基于ANN集成的模糊系统模型
1.1高木-关野模型
1987年,文献[10]结合模糊逻辑和神经网络进行了研究,此后模糊神经网络技术的研究与实际应用发展迅速。模糊逻辑利用隶属度函数表征一个元素对于某个集合的隶属程度,其取值一般在(0,1)的范围内,隶属度越接近于1,说明该元素对这个集合的隶属程度越高。
图1是简单的BP神经网络的拓扑结构。
目前的模糊神经网络的结构类型非常丰富,主要可以分为普遍适用的网络和专门用途的网络,约有十余种[16]。模糊神经网络的神经节点由模糊神经元构成,在一般的模糊神经元中,输入信息是通过模糊规则来与其输出联系的,为了描述不确定性和模糊信息,规则的前提和结论都用模糊集合来表示。TSM 1985年由日本的高木和关野提出,是模糊系统中常用的规则模型,可用于模糊控制和系统辨识[17-18]。常见的有n个输入变量、单个输出、m条模糊规则的高木-关野模糊系统具有如下形式的模糊规则。

(1)
式中,C为实数系数。

图1 BP神经网络的拓扑结构
1.2基于神经网络集成的模糊系统模型
常用的TSM的系统输入空间都是线性分割,系统的输出与输入条件也是线性关系,而目标的战术意图往往是由多种因素决定的,这些因素之间相互影响,使得输入条件与输出结论之间是非线性的关系。对于这种情况,若采用TSM,需要对输入空间进行精细地划分,但这样一来,模糊规则的数量将大量增加。为了避免该问题,采用另一种规则形式。
形式 2IfX∈Rj, theny=fj(X)。其中,Rj为输入空间按照输出的不同类型分割后的部分空间,这样一来不需要按照形式1对输入空间进行大量的分割。不过,采用这种规则形式时,输入的参数对应的隶属度函数无法像一般的TSM一样单独获得,为了解决这个问题,采用一个神经网络NNmf来计算针对不同类型输出的输入变量隶属函数,利用另外的几个神经网络对应给出结论部分的输出函数fj(X),计算输入条件面向不同输入结论的结果,这样,构建出一个基于神经网络集成的模糊系统模型,如图2中蓝色区域所示。利用这个模型,在获得输出结论的同时,能够获得样本对不同示意图的隶属度结果。
模糊系统模型中,神经网络NNmf用于给出输入信息对应m类结论的模糊隶属度,对应的有m项输出,而另外的几个神经网络NNj(j=1,2,…,m)分别用来表示网络的m类输出结论部分的fj(X)。模糊神经网络系统的输出:
(2)
式中,gj对应BP神经网络NNj(j=1,2,…,m)的输出,而μj对应各条模糊规则的模糊隶属度。

图2 模糊神经网络进行目标战术意图识别的系统和流程
建立这样的模糊神经网络系统,首先要根据需要确定系统的模糊规则条数m,进而建立起适合的神经网络NNmf来计算模糊隶属度,之后利用收集到的训练样本的输入部分对NNmf进行训练,生成结论部分非线性函数的神经网络NNj(j=1,2,…,m)则利用对应不同结论的训练样本进行训练。
网络采用BP算法进行训练。训练的过程是网络根据样本,不断地调整权值和阈值以适应训练样本的输入输出的过程。当网络的输出与样本的误差满足要求或训练次数达到设定值时,训练结束。网络在训练时可能会发生过学习的情况,即由于学习样本的数量限制,在达到误差要求时系统并不能很好的反应输入参数和输出结果的关系,为此,引入准则函数:
(3)

2 目标战术意图识别的步骤
基于神经网络集成的模糊系统模型对目标战术意图进行识别,其系统和流程如图2所示,分为以下步骤。
步骤 1选择符合条件的包含目标输入参数和输出意图的样本集合 (xi,yi),选择在遥感解译过程中可以获取的目标属性输入参数。根据训练的需要,将样本分为两个类别。其中一部分作为训练样本来训练模糊神经网络,先要对这些样本进行归一化处理,目的是减少输入参数之间因为数量级差异造成的影响;另一部分样本用于在网络训练完成后,测试模糊神经网络系统的性能。
步骤 2将全部训练样本的输入部分用于训练NNmf,使这个神经网络能够计算输入参数对应不同输出意图的模糊隶属度。根据输入参数对应的战术意图对训练样本进行聚类,每一类样本对应一条模糊规则,聚类为m组,即有m条规则。聚类后的每一类样本用于训练NNj(j=1,2,…,m)等m个神经网络。例如,NN1的输出战术意图为“突防”,那么NN1网络对应的所有输入/输出样本就是意图为“突防”那一类样本。
当样本中的某一个样本xj聚类到第k类时,训练得到的输出权值有
(4)
式中,j=1,2,…, m。
网络的激励函数的取值表示了该变量属于某一类的概率,在此选择Sigmoid函数,考虑到其有时不能完全取到1/0值,为了提高网络的训练速度,用0.9/0.1代替,即
(5)
由于Sigmoid函数的单调特性,训练后的网络能够给出输入参数针对于不同输出意图的隶属关系。
步骤 3当构建的模糊神经网络系统训练完成后,输入待识别的海面目标输入参数,系统根据训练达到的权值等参数自适应地处理样本参数,之后由NNmf计算得到输入参数对各种意图的模糊隶属度μj,NNj(j=1,2,…,m)各个神经网络会计算得到各网络的输出结果gj,然后由式(3)求出目标对应的战术意图。
3 实验分析
3.1系统的输入参数与输出
分析海上目标的战术意图,根据应用背景,首先通过遥感解译获取目标的相关属性,作为模糊神经网络的输入参数,其对应的战术意图将作为输出。其中,遥感解译的方法不是本文的研究重点,但根据应用背景的要求,选取的目标输入属性参数需要满足以下几个条件:
(1) 能够比较容易地从遥感解译中获取;
(2) 与目标的军事意图有直接的关联和影响;
(3) 便于进行数学模型量化作为模糊神经网络系统输入。
综合考虑上述条件,本文选取了“目标型号”“目标距我方军事单位距离”“目标前进方向”以及“目标所处编队类型”作为海面目标战术意图识别的输入变量。目标输出的战术意图选取了“攻击”“侦察”“突防”和“撤退”[4],这些意图比较具有代表性,威胁程度各有不同,同时“攻击”和“突防”意图的交叉模糊部分也能够衡量模糊神经网络系统的可靠性。其中,“目标型号”和“目标所处编队类型”采用整数表示,选取了5类舰船目标以及4种编队情况作为研究对象,如表1和表2所示。
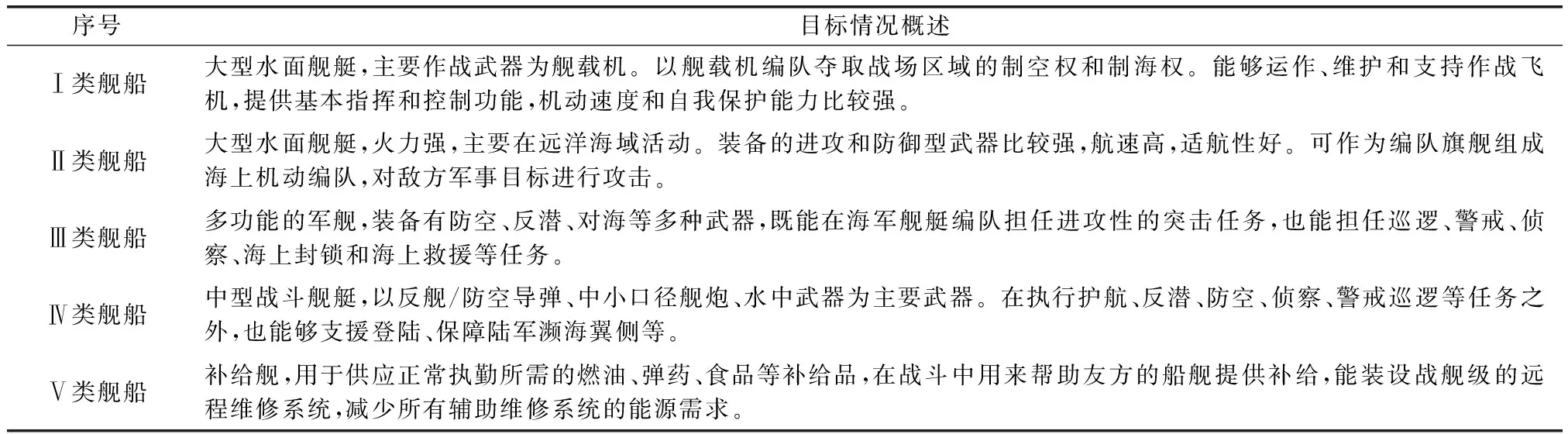
表1 目标型号选取

表2 舰船编队工作状态
这5类舰船在海上战场使用最广泛且具备不同的应用价值和战略意义,因此以这5类舰船目标为主要研究对象。
为了构建模拟样本库,根据相关领域的专家知识,确认了不同输入参数主要影响的两类战术意图,在此分别简单介绍。
对目标型号而言,Ⅰ型和Ⅱ型舰船具备较强的攻击性,而Ⅳ型和Ⅴ型舰船相对攻击性较弱,机动侦察能力较强,其模拟关系如表3所示。

表3 目标类型与目标军事意图的关系
目标据我方主要军事单位的距离对目标意图的影响伴随着不同类型目标的攻击范围变化而变化。简单起见,根据不同目标的攻击范围初步设定了一些距离阈值,如表4所示。

表4 目标距离与目标军事意图的关系
目标前进角度较小时,说明目标是向着我方的主要军事单位前进,其相应威胁也会较大,其模拟关系见表5。

表5 目标前进角度与目标军事意图的关系
目标所处编队的结构组成与目标军事意图的关系和目标与目标编队情况的作战等级有关,表6给出了其相应的关系。

表6 目标编队情况与目标军事意图的关系
根据以上关系,综合每组样本数据的输入,根据专家评估得到每组样本对应的输入意图,在实际应用中,可以收集大量的实际数据作为系统。这些样本最终构成系统的训练样本和测试样本。本文选取了60组这样的样本,其中40组用于训练系统的结构,另外20组用于测试系统的准确性。
3.2系统的训练
用y代表该样本对应的战术意图,分别用数字1~4表示,对应关系如表7所示。

表7 系统输出意图对应数值
本文选取的40组训练样本中的一部分样本如表8所示。(x1,x2,x3,x4)=(目标类型,目标距我方主要军事单位距离,目标前进方向,目标编队情况),训练样本的选择以“典型”为基本原则,表8给出的是系统所采用的训练样本的一部分。

表8 系统训练样本(部分)
确定了训练样本后,要对训练样本的输入进行归一化处理。由于目标类型、目标编队两类输入信息都是5以内的整数,而目标距我方主要军事单位距离和目标前进方向的数量级相对很大,会削弱目标类型和编队情况对网络训练过程的影响,因此将每类输入参数归一化映射到(0,1)上。部分归一化后的训练样本输入如表9所示。

表9 归一化后的系统训练样本(部分)
之后首先训练计算模糊隶属度函数的网络NNmf,经过调整,NNmf有4个输入节点和4个输出节点,含有两个隐层,节点数目均为7,隐层节点的数目是根据式(6)不断调整得到的最佳值。
(6)
式中,l,m,n分别表示隐层、输入层和输出层的节点数;a为0~10之间的任意整数[19]。用训练样本输入值进行训练,反复训练4 000次,学习效率η=0.009,允许的最大误差为0.001 8,网络要求的精度为0.000 04,输出为输入样本面向不同意图的模糊隶属度值,训练得到NNmf网络的误差平方和为0.015 772。NN1~NN4的训练过程与NNmf类似。NN1~NN4的每个网络均有4个输入节点和1个输出节点,含有两个隐层,隐层节点数为8,每个网络各10组训练样本。学习效率η=0.000 35,允许的最大误差为0.002,网络要求的精度为0.000 5,反复训练10 000次,即可得到稳定的输出。训练完成后,得到的部分训练样本的模糊隶属度如表10所示。

表10 训练样本的模糊隶属度训练结果(部分)
3.3系统的测试
系统训练完成后,选取了20组测试样本用来测试系统的性能。选取测试样本如表11所示。

表11 系统测试样本
当网络训练完成之后,即可分别将20组测试样本输入系统中进行测试,系统会根据训练得到的权值和阈值的参数,对测试样本反映的目标战术意图值和隶属度关系进行计算,以此来对整个系统的性能进行判断。计算得到的测试样本针对不同意图的模糊隶属度结果如表12所示。

表12 测试样本的模糊隶属度测试结果
根据式(2)计算各输入样本的目标战术意图值,系统对测试样本的输出值和期望值如表13所示。其中y′代表系统的输出结果。

表13 模糊神经网络的测试样本输出结果
由上述的模糊神经网络系统对测试样本计算得到的输出值与期望值的对比如图3所示。
可以看出,系统测试样本取得的结果比较准确,所产生的数值误差都比较低,对目标战术意图的计算数值与期望值相差很小,再由式(7)计算测试样本的标准差,得D=0.022 0,可以看出,系统测试结果对实际结果拟合效果比较好。
(7)

图3 测试样本的运算输出值与期望值的比较
4 结 论
面对复杂多变的海战场环境,准确地判断出感兴趣目标的动向和意图,对于指挥员的指挥决策起着重要的影响,也是整个态势生成和构建的基础。本文针对目标战术意图识别输入输出非线性的特点,设计了基于神经网络集成的模糊系统模型和战术意图识别方法,通过对测试样本的测试分析说明,方法对目标战术意图的识别取得了良好的结果。在下一步的工作中,将对方法的实用性进行进一步的提高和验证,并对系统的时效性进行提升。
[1] Peng J X, Xin D S. Research on operational scenario generation technique for naval battlefield situation analysis[J].CommandControlandSimulation,2011,33(3):39-42.(彭建雄,辛登松.海战场态势分析作战想定生成技术研究[J].指挥控制与仿真,2011,33(3):39-42.)
[2] Leng H P, Wu X F, Yu Y Q. Study on surface ship maneuvering type recognition[J].ShipScienceandTechnology, 2007, 29(4): 51-53. (冷画屏, 吴晓锋, 余永权. 水面目标机动类型识别研究[J].舰船科学技术, 2007, 29(4): 51-53. )
[3] Niu X B, Zhao H, Zhang Y C. Naval vessel intention recognition based on decision tree[J].OrdnanceIndustryAutomation, 2010, 29(6): 44-53. (牛晓博, 赵虎, 张玉册. 基于决策树的海战场舰艇意图识别[J].兵工自动化, 2010, 29(6): 44-53.)
[4] Zhu A F, Jing Z R, Chen W J, et al. Data fusion based on ANFIS and evidence theory[J].JournalofNorthUniversityofChina(NaturalScienceEdition),2009,30(1):74-79.(朱安福,景占荣,陈炜军,等.基于ANFIS和证据理论的信息融合研究[J].中北大学学报(自然科学版),2009, 30(1): 74-79.)
[5] Sun Y L, Bao L, Chen H D. Research on recognition technique of target tactical intentions in sea battlefield[C]∥Proc.ofInternationalSymposiumonComputationalIntelligenceandDesign,2012:130-133.
[6] Sun Y L, Dai R. Research on recognition technique of target tactical intentions in sea battlefield[C]∥Proc.oftheChineseSocietyofNavalArchitectsandMarineEngineers(SectionA), 2013:302-306.(孙越林,戴荣.海战场目标战术意图识别技术研究[C]∥中国造船工程学会学术论文集(A集),2013:302-306.)
[7] Johansson F, Falkman G. Implementation and integration of a Bayesian network for prediction of tactical intention into a ground target simulator[C]∥Proc.ofthe9thInternationalConferenceonInformationFusion, 2006: 1-7.
[8] Ge S, Xia X Z. DSBN used for recognition of tactical intention[J].SystemsEngineeringandElectronics, 2014, 36(1): 76-83. (葛顺, 夏学知. 用于战术意图识别的动态序列贝叶斯网络[J].系统工程与电子技术, 2014, 36(1): 76-83.)
[9] Deng H J, Yin Q J, Hu J W, et al. Tactical intention recognition based on multi-entity Bayesian network[J].SystemsEngineeringandElectronics,2010,32(11):2374-2379.(邓海军,尹全军,胡记文,等.基于MEBN的战术意图识别[J].系统工程与电子技术, 2010, 32(11): 2374-2379.)
[10] Chiroma H, Abdulkareem S, Abubakar A, et al. Co-active neuro-fuzzy inference systems model for predicting crude oil price based on OECD inventories[C]∥Proc.oftheInternationalConferenceonResearchandInnovationinInformationSystems, 2013: 232-235.
[11] Wu G D, Huang P H. A vectorization optimization method based type-2 fuzzy neural network for noisy data classification[J].IEEETrans.onFuzzySystems, 2013, 21(1): 1-15.
[12] Li D Z, Wang W, Ismail F. Fuzzy neural network technique for system state forecasting[J].IEEETrans.onCybernetics, 2013, 43(5): 1484-1494.
[13] Han H G, Wu X L, Qiao J F. Nonlinear systems modeling based on self-organizing fuzzy neural network with adaptive computation algorithm[J].IEEETrans.onCybernetics, 2014, 44(4): 554-564.
[14] Mao J, Zhao H D, Yao J J. Development and application of ANN[J].ElectronicDesignEngineering,2011,24(19):62-65.(毛健,赵红东, 姚婧婧. 人工神经网络的发展及应用[J].电子设计工程, 2011, 24(19): 62-65.)
[15] Singh B, Arya S R. Back-propagation control algorithm for power quality improvement using DSTATCOM[J].IEEETrans.onIndustrialElectronics, 2014, 61(3): 1204-1212.
[16] Gu X P. Study on the adaptive network-based fuzzy inference system and its simulation[J].FireControlandCommandControl, 2010, 35(2): 48-49, 53. (顾秀萍. 自适应神经模糊推理系统(ANFIS)及其仿真[J].火力与指挥控制, 2010, 35(2): 48-49, 53.)
[17] Dong Y K, Kwae H Y, Ju H K, et al. Prediction of leak flow rate using fuzzy neural networks in severe post-LOCA circumstances[J].IEEETrans.onNuclearScience, 2014, 61(6): 3644-3652.
[18] Wai R J, Muthusamy R. Fuzzy neural network inherited sli-ding-mode control for robot manipulator including actuator dynamics[J].IEEETrans.onNeuralNetworksandLearningSystems, 2013, 24(2): 274-287.
[19] Sabna N, Kamal S, Supriya M H, et al. Implementation of an underwater image classifier using neural networks[C]∥Proc.oftheInternationalSymposiumonOceanElectronics, 2011: 145-151.
Fuzzy neural network based tactical intention recognition for sea targets
CHEN Hao, REN Qing-long, HUA Yi, QIU Yu-ning
(School of Electronics and Information Engineering, Harbin Institute of Technology, Harbin 150001, China)
Traditional methods of tactical intention analysis for sea targets, which are based on the information obtained from remote sensing interpretation, need plenty of expert knowledge to confirm the relationship of network nods between input target property and output intention. However, the fuzzy neural network only utilizes input and output samples in the network training process, reducing the requirement of expert knowledge. In tactical intention recognition for sea targets, the relationship between inputs and outputs is nonlinear so that the typical Takagi-Sugeno model cannot handle this situation. Thus, a fuzzy system model based on integrated neural networks is established, in which target property and the intention are used to train neural networks to obtain the degree of fuzzy membership and output functions of different intentions. Using that model, the tactical intention of sea targets is then recognized. Experimental results present high accuracy of tactical intention recognition and are consistent with the situation.
tactical intention recognition; fuzzy neural network; degree of fuzzy membership; error back propagation
2015-08-31;
2016-01-19;网络优先出版日期:2016-03-22。
E 83
A
10.3969/j.issn.1001-506X.2016.08.20
陈浩(1978-),男,副教授,博士,主要研究方向为图像与视频压缩、遥感数据解译与人工智能。
E-mail:hit_hao@hit.edu.cn
任卿龙(1993-),男,硕士研究生,主要研究方向为遥感数据解译与模糊神经网络。
E-mail:eric0628@126.com
滑艺(1991-),女,硕士研究生,主要研究方向为多时相图像变化检测与动态贝叶斯网络。
E-mail:1652746930@qq.com
邱宇宁(1993-),男,主要研究方向为目标检测与图像处理。
E-mail:18686811860wsqyn@sina.com
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160322.1143.004.html