基于提高闭环跟随特性的位置随动系统设计与仿真
2016-08-12张坤,周浩
张 坤,周 浩
(海军工程大学,武汉 430033)
基于提高闭环跟随特性的位置随动系统设计与仿真
张坤,周浩
(海军工程大学,武汉430033)
摘要:为提高闭环随动系统的跟随特性,使其满足舰载武器系统苛刻的使用要求,文章在双闭环调速系统的基础上对三闭环位置随动系统进行综合设计。对PID调节器的参数进行工程整定,并通过Simulink仿真检验系统性能,验证了设计方案的正确性。结果表明该系统具有较好的包括稳定性、响应速度在内的综合跟随性能,能够满足舰载武器随动系统的使用要求。
关键词:位置随动;PID调节;反馈结构
本文引用格式:张坤,周浩.基于提高闭环跟随特性的位置随动系统设计与仿真[J].兵器装备工程学报,2016(6):87-91.
Citationformat:ZHANGKun,ZHOUHao.DesignandSimulationofPositionServoSystemBasedonImprovementofClosed-LoopTrackingPerformance[J].JournalofOrdnanceEquipmentEngineering,2016(6):87-91.
作为电气控制系统的一个重要分支,位置随动系统在工业、国防领域中的应用非常广泛,如雷达天线的自动瞄准和火炮方位的自动跟踪等。舰载武器装备的随动系统是典型的按角偏差控制的闭环控制系统,对系统跟踪的精确性和快速响应能力要求更高,单靠古典的控制系统设计方法很难如愿以偿。因此,采用现代控制设计技术设计舰载武器随动系统是非常必要的。
文中设计的是一种三闭环结构、采用PID调节器进行校正的位置随动系统。由直流伺服电机带动一个转台组成。当输入一个偏转角位移时,转台能够在电机的带动下稳定、准确、快速跟踪。为使系统在复杂条件下能稳定运行,必须设计合理的负反馈结构。为满足工业和军事领域的使用要求,系统在保证稳定性的基础上还应具有较短响应时间、精确跟踪定位等运动特性。该系统采用三环控制方案,即电流环、速度环和位置环。三闭环位置随动系统可以看作是在双闭环调速系统基础上加上位置环组成。
1 双闭环调速
双闭环调速装置的系统结构图如图1,其中电流环为内环,速度环为外环。
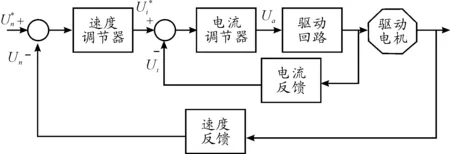
图1 双闭环系统结构框图
1) 电流调节器的作用是使电流紧跟速度调节器给定的输出量,提高系统的抗扰性能。电流环控制在伺服电机内进行,通过霍尔元件检测驱动器给电机的输出电流,负反馈给电流调节器与设定电流比较并进行PID调节,从而达到输出电流尽量接近或等于设定电流的效果。由于电流可以直接控制电机的转矩,电流环通过对输出电流的控制可以完成对电机转矩和转速的控制。
在工程设计中,考虑到系统的机电时间远大于系统的电磁时间,即电流的变化比转速快得多,在电流调节的过程中可以忽略反电动势的影响。从稳态性能上看,希望电流无静差,以得到理想的堵转特性,把电流环校正成Ⅰ型系统可以满足稳态误差的精度要求;再从动态性能方面考虑,实际系统不允许电枢电流在突加控制时有太大的超调,以保证电流在动态过程中不超过允许值,电流环应以跟随性能为主,抗扰作用只是次要因素。因此电流环在工程设计中应选择典型的Ⅰ型系统。
2) 速度调节器的作用是使转速n能很快地跟随给定电压变化,稳态时可以减小转速误差。速度环的控制实际上就是对电流环的控制,根据编码器的反馈信号进行负反馈调节,输出电流环的电流设定信号,即电流环中允许通过的最大电流,使电机能够以不同的速度平稳转动,从而达到控制电机转速的目的。
在工程设计中,把电流环等效为速度环中的一个串联环节,根据速度环的设计要求,需要速度无静差,再考虑到速度环对系统的动态抗扰性要求较高,这样速度环应设计成典型的Ⅱ型系统,采用PI调节器作为速度调节器[4]。
2 三闭环位置随动系统设计
2.1设计概述
与双闭环系统不同的是,在三闭环系统中除速度环外还外加了一个位置环,因此速度环应该被等效为一个一阶惯性环节,要按照Ⅰ型系统设计。
位置调节器的作用是在位置控制模式下,位置环输出速度指令使电机准确地定位和跟踪。位置环通过设定的目标位置与电机的实际位置相比较,利用其偏差,通过位置调节器产生电机的速度指令。显然,位置环更加强调跟随性能,因此将系统设计为典型的Ⅱ型系统。位置调节器则采用PID调节器。
三闭环位置随动系统结构如图2所示。
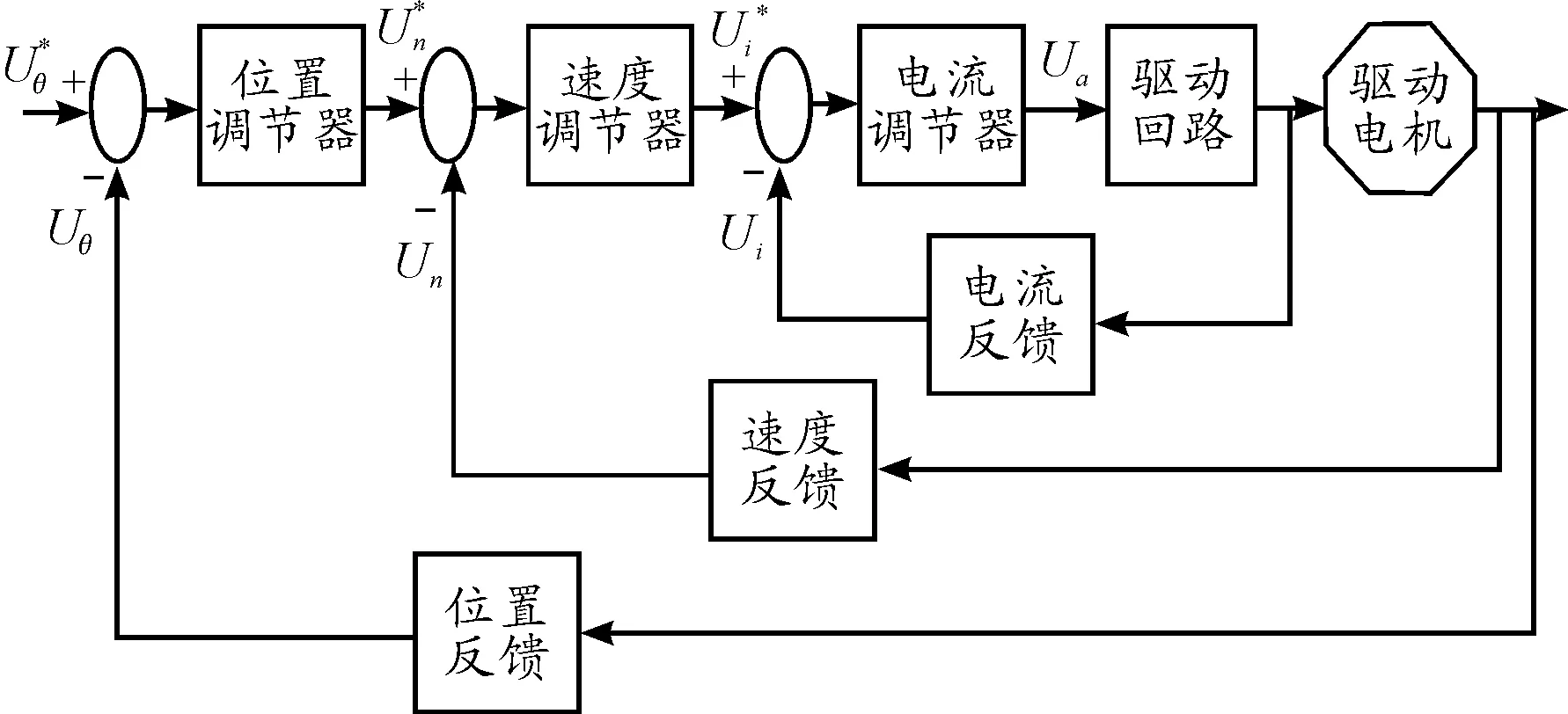
图2 三闭环位置随动系统结构框图
三闭环可看做是在双闭环调速系统之外加上一个位置环,因此它除了能够进行位置随动外,还能进行速度调节。
在系统总体设计中将系统分以下7个部分:
1) 装备负载(EL)
负载是整个系统的被控制对象,在这里为位置对象,其传递函数可近似为积分环节
(1)
2) 直流伺服电机(SM)
本次设计为大功率位置随动系统,选用永磁式直流伺服电机。伺服电机可视为一个二阶系统,分为两个传递函数,一部分为电机电枢,另一部分为传动装置。其中电机电枢可近似成一阶惯性环节,传递函数为
(2)
式中,K2为电机电枢增益常数,Ta为电机电枢时间常数。
传动装置近似为积分环节,传递函数为
(3)
式中,K3为电机转矩常数,Tm为电机机电时间常数。
3)PWM变换器(PWM-MC)
起到功率放大的作用。在本次大功率位置随动系统中选取的是双极式桥式可逆PWM变换器,因为是大功率系统,变换器采用可关断晶闸管。失控时间非常小,大大提高了系统的快速性,该时间滞后环节可以近似看成是一个一阶惯性环节,传递函数为
(4)
式中,K1为晶闸管增益常数,T1为晶闸管失控时间。
4) 电流调节器(ACR)
按工程设计法选择典型的Ⅰ型系统,选用PI调节器。传递函数为
(5)
式中,Kpi是电流调节器的比例系数,Ti是电流调节器的时间常数。选择Ti等于系统电磁时间常数Tl时可使得调节器零点与控制对象的时间常数极点对消,通常Ti=0.07s。而Kpi的参数依据典型Ⅰ型系统的参数关系并结合实际的动态性能指标来决定。
5) 速度调节器(ASR)
在双闭环调速系统中,虽然速度环校正采用的是典型的Ⅱ型系统,但是在三闭环系统中,除速度环外还有位置环,所以速度环应该看成是一个一阶惯性环节[5],按照Ⅰ型系统设计。按工程设计法选择典型的Ⅰ型系统,选用PI调节器。传递函数为
(6)
式中,Kpn是速度调节器的比例系数,选用131.7,Tn是速度调节器的时间常数,通常Tn=0.08s。
6) 位置调节器(AWR)
按工程设计法选择典型的Ⅱ型系统,选用PID调节器。传递函数为
(7)
式中,Kpw是位置调节器的比例系数,Tw1和Tw2分别为积分时间和微分时间。
7) 位置传感器(PS)
模拟随动系统的位置传感器大体可以分为两种,电位器和基于电磁感应原理的位置传感器[6]。基于电磁感应原理的位置传感器有自整角机、旋转变压器、感应同步器等,可靠性和精度都比较高。本次设计采用自整角机作为位置传感器。自整角机在随动系统中总是成对使用。发送机与指令轴相连,接收机与执行轴相连。对功率较大的负载,可采用控制式自整角机,将接收机输出电压通过中间放大环节带动负载。
2.2PID调节器参数整定
由于电机的非线性运行,要使随动系统能精确到达指定位置并非易事。电机起动时电流维持在最大值,电机转速则以最大速度上升至最高转速,由于电流依然保持在最大值,转速还会继续升高,出现转速超调现象[3]。此时速度调节器退饱和,指示电流调节器控制电流下降至负载电流,转速不再增加,电机平稳起动。电机的起动过程就是电机转速以一个恒定的加速度加速,达到指定的负载转速后加速度减小为零,转速保持恒定的过程。电机制动时,为达到快速制动的目的,对电机施加反向的最大电流,电机的转速以最大速度下降至零,转速调节器退饱和,电流下降为零,电机减速停止。
可见,在三闭环位置随动系统的设计中,电流环的超调量越小越好,速度环的时间常数越大和增益越低,速度环越稳定,但精度和动态特性越差。因此需要对PID调节器的参数进行工程整定,在稳定的前提下尽量提高系统的精度和动态特性。要按照“先内环后外环”的工程设计原则,先将电流环调稳,再调速度环,最后调位置环。
图3为三闭环位置随动系统的动态结构图,图中ACR是电流调节器,ASR是速度调节器,AWR是位置调节器。
通过工程设计,经工程计算法得到各调节器的传递函数模型如下:
3 仿真试验及分析
根据给定的参数对设计的三闭环位置系统进行Simulink仿真,将计算得到的调节器应用到系统中,并进行仿真分析,如图4。
图5给出了三闭环位置系统的阶跃响应。纵坐标表示位移(m),横坐标表示时间(s)。不难得到系统的跟随性能指标:超调量σ=7.5%,调节时间ts=0.046s,峰值时间tp=0.053s。
超调量反应系统平稳性,一般要求最大超调量不超过10%,最大值越接近终值[2],超调量越小,系统平稳性越好,上升时间和峰值时间表征了系统快速性的好坏,时间越短性能越好,要求系统调整时间ts<0.7s。由此可见,本次设计的三闭环系统在超调量、调节时间、峰值时间这三个方面都能较好满足系统要求,尤其是在调节时间上有很大提高,比要求的指标高出15倍。
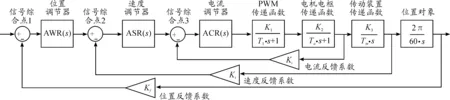
图3 三闭环位置系统动态结构
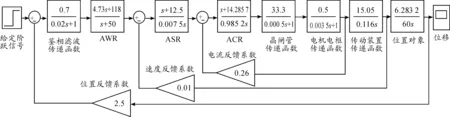
图4 三闭环位置随动系统Simulink仿真框图
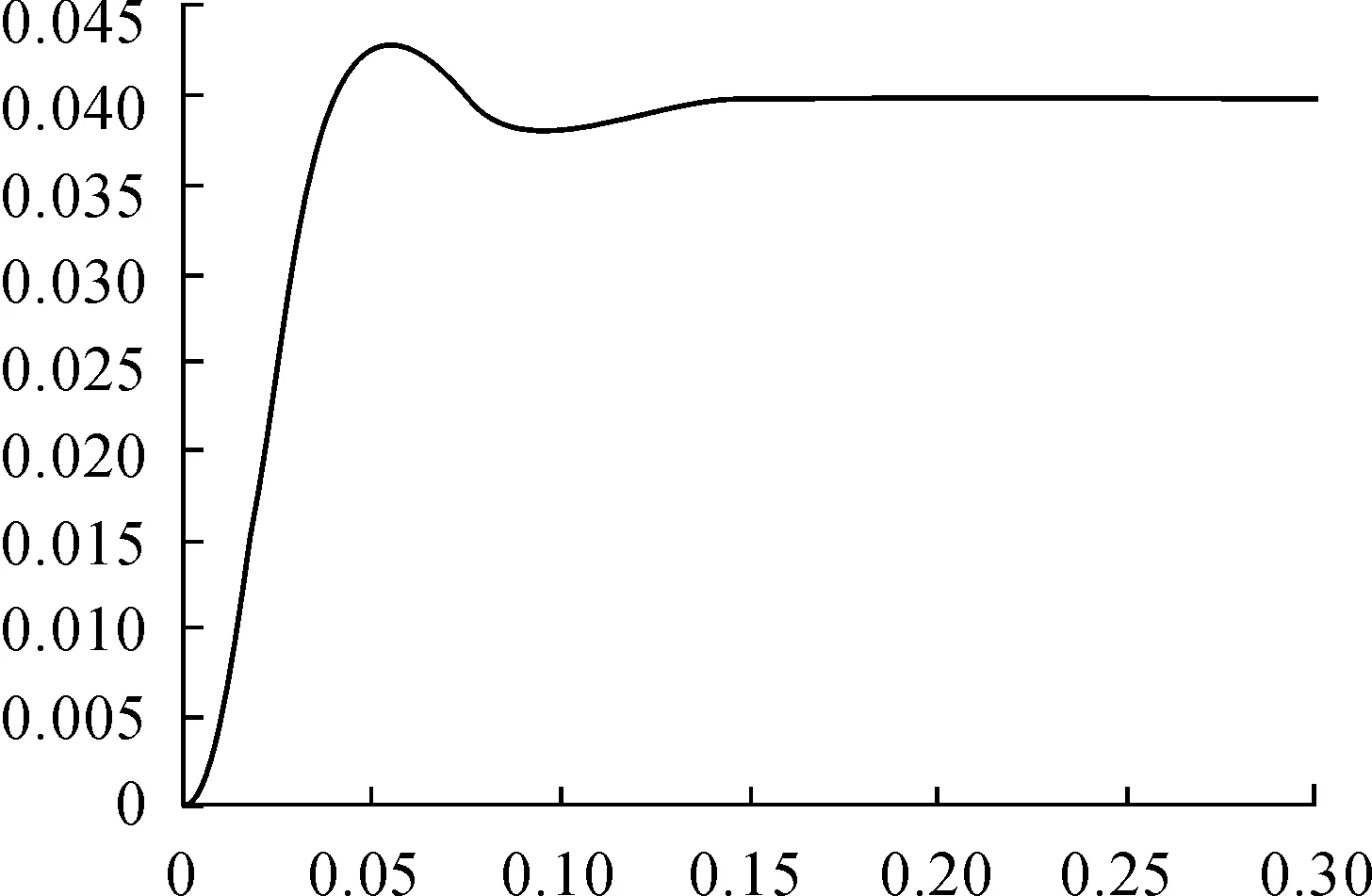
图5 三闭环位置系统的阶跃响应曲线
分别给双闭环和三闭环系统施加阶跃激励信号,通过仿真得到图6和图7所示的电流和速度响应曲线。
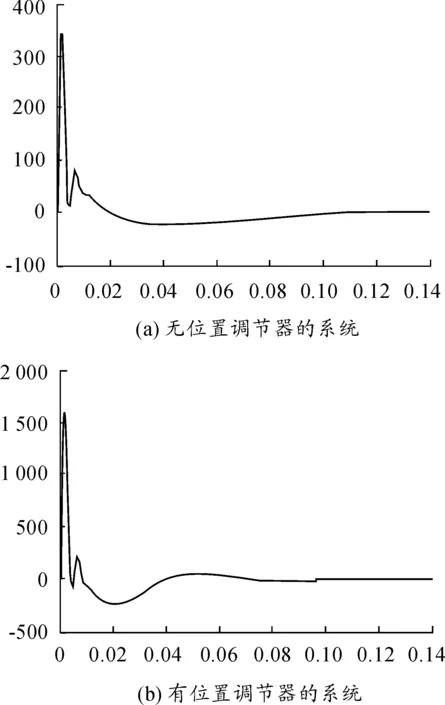
图6 双闭环与三闭环系统电流响应对比
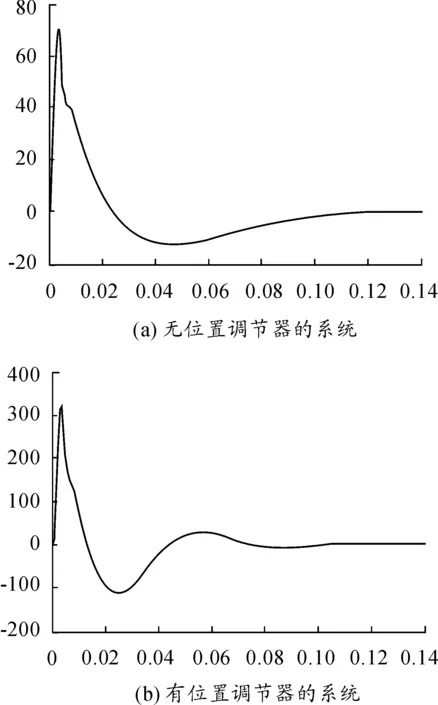
图7 双闭环与三闭环系统速度响应对比
由图6、图7在空载情况下有、无位置调节器时随动系统的电流和速度响应曲线可知,没有位置调节器的控制系统电流和速度响应比有位置调节器的控制系统略慢,有位置调节器的控制系统能在0.08s左右达到稳定状态,且速度响应中的上升时间更短一些,能在一定程度上满足直流电机快速启动的需求。说明增加了位置环之后的三闭环系统不仅具有了跟踪能力,在响应速度上还得到了提高。
通过对三闭环系统的仿真研究以及与双闭环系统性能的对比可以看出,设计的三闭环系统是一个稳定的负反馈系统。与以往舰载武器装备型号的随动性能相比,该系统的跟随性能指标中超调量更小,调节时间更短,响应速度更快,系统稳定性相对于双闭环系统有了进一步提高,符合系统整体设计要求。
4 结语
本文设计旨在提高某舰载武器随动系统的跟随特性,提高武器系统响应速度和随动瞄准精度。文章在简要分析角位置随动系统的框架结构及工作原理的基础上,给出了三闭环位置随动系统的详细设计方案并进行Simulink仿真与检验。以双闭环调速系统为基础,提出了大功率三闭环位置随动系统的设计方案,将系统分为七大部分,并对PID调节器的参数进行了整定,使其能够较好地实现控制要求。通过模型分析验证了方案的可行性,验证了系统在稳定性、响应速度等跟随性能方面均能达到理想效果,与以往舰载武器装备型号的随动性能相比,跟随特性更加优越。
参考文献:
[1]黄永安,马路,刘慧敏.MATLAB7.0/Simulink6.0 建模仿真开发与高级工程应用[M].北京:清华大学出版社,2005.
[2]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2005.
[3]卢志刚,吴杰,吴潮.数字伺服控制系统与设计[M].北京:机械工业出版社,2007.
[4]周浩,徐学武,黄善忠.基于提高抗扰性和跟随性能的控制策略研究[J].四川兵工学报,2015(9):97-101.
[5]万百五,韩崇昭,蔡远利.控制论—概念、方法与应用[M].北京:清华大学出版社,2009.
[6]刘煜,张科,李言俊.一种位置随动控制系统的建模与仿真研究[J].弹箭与制导学报,2015,25(2):4-6.
[7]王永兰,胡琳静,席东民.位置随动系统的设计及仿真研究[J].仪器仪表学报,2009,30(6):332-334.
[8]刘亚静,李铁才.电机数字控制器发展现状[J].伺服控制,2011(8):25-28,32.
[9]梁亦铂,王正茂,何涛,等.全数字直流电机调速系统的原理及数学模型[J].中小型电机,2001,28(6):17-20.
[10]张乐.直流电机智能调速系统的设计与实现[J].科学与财富,2011(9):18-19.
(责任编辑周江川)
doi:10.11809/scbgxb2016.06.021
收稿日期:2016-01-02;修回日期:2016-02-03
作者简介:张坤(1993—),男,主要从事兵器科学与技术研究。
中图分类号:TJ765.1
文献标识码:A
文章编号:2096-2304(2016)06-0087-05
DesignandSimulationofPositionServoSystemBasedonImprovementofClosed-LoopTrackingPerformance
ZHANGKun,ZHOUHao
(NavalUniversityofEngineering,Wuhan430033,China)
Abstract:In order to improve the following performance of closed-loop servo system to meet the severe requirements of ship-borne weapon system, a three closed-loop position servo system was designed on the basis of the double closed-loop velocity regulation system. In the three closed-loop position servo system, the parameters of PID regulator were adjusted and the system performance was verified. The simulation verified the correctness of the design scheme. The results show that the system is of good following performance including stability and response speed and it meets the application requirements of ship-borne weapon system.
Key words:position servo; PID regulation; feedback structure