悬浮式深弹反鱼雷武器仿真试验系统设计
2016-08-12田恒斗侯宝娥
房 毅,田恒斗,侯宝娥
(中国人民解放军91439部队,辽宁 大连 116041)
悬浮式深弹反鱼雷武器仿真试验系统设计
房毅,田恒斗,侯宝娥
(中国人民解放军91439部队,辽宁 大连116041)
摘要:针对某型悬浮式深弹反鱼雷武器系统设计定型试验的需求,依据其设备组成和作战流程,从系统功能模拟的角度,基于模块化设计思想开发了一种仿真试验系统,详细介绍了该仿真试验系统7个模块的主要功能及系统工作流程;应用实例表明:该仿真系统可实现不同态势、不同环境下悬浮式深弹反鱼雷武器系统对不同类型来袭鱼雷作战过程的仿真试验,解决了拦截概率指标考核需要大量样本的难题。
关键词:反鱼雷武器;悬浮式深弹;仿真试验系统;设计
本文引用格式:房毅,田恒斗,侯宝娥.悬浮式深弹反鱼雷武器仿真试验系统设计[J].兵器装备工程学报,2016(6):79-82.
Citationformat:FANGYi,TIANHeng-dou,HOUBao-e.SimulationTestSystemDesignofHoveringDepthChargeAnti-TorpedoWeapon[J].JournalofOrdnanceEquipmentEngineering,2016(6):79-82.
鱼雷武器自从诞生起就对水面舰船安全构成了巨大威胁,因此反鱼雷技术一直是世界各国研究的热点。不过,由于反鱼雷作战涉及因素众多、技术难度大,在很长一段时间内,水面舰船对鱼雷仅有声诱饵、声干扰器等软对抗手段[1-2]。然而,随着鱼雷自导技术的不断发展,特别是尾流自导鱼雷的大量装备,传统的水声对抗手段已难以形成有效的对抗能力[3-4]。因此,各国海军普遍开始重视研发直接摧毁来袭鱼雷的硬杀伤式对抗技术,其中以俄罗斯海军已装备的反鱼雷深弹和美、德等国正在发展的反鱼雷鱼雷最为典型。在此背景下,我国也加紧了悬浮式深弹反鱼雷武器系统的研发、试验和作战使用研究[5-9]。在装备研制到使用的全程中,试验鉴定工作贯穿始终。特别是在设计定型阶段,须对武器装备的战技指标做出全面、科学、准确的考核评价,作为装备能否列装的核心依据。对悬浮式深弹反鱼雷武器系统而言,对来袭鱼雷的拦截概率指标是表征其作战能力的关键要素,因此在定型试验中必须给出科学评价。而对大型武器系统概率类指标的考核,需要大量的试验样本,但受试验周期、经费等因素制约,一般无法通过全实装、实兵试验达成,仿真试验就成为一种必然选择。同时,仿真试验还具有可控性安全性好、不受水文气象等不可控因素限制等诸多优势,已成为武器装备试验的重要发展方向,在国内外也已获得大量应用[10]。
鉴于此,本文针对悬浮式深弹反鱼雷武器系统试验鉴定的现实需求,依据其系统组成和作战流程,基于模块化的设计思想,开发了一种悬浮式深弹反鱼雷武器仿真试验系统,并对不同态势下该武器系统的拦截概率进行了仿真试验。
1 武器系统组成及其作战流程
悬浮式深弹反鱼雷武器系统主要由鱼雷报警声纳、火控设备、发控设备、武器发射装置(包括随动设备和发射炮)和悬浮式深弹等五部分组成,并通过作战系统以太网与本舰作战指控系统、导航、水文气象、火力兼容控制、时统设备等系统交互信息[9],如图1所示。
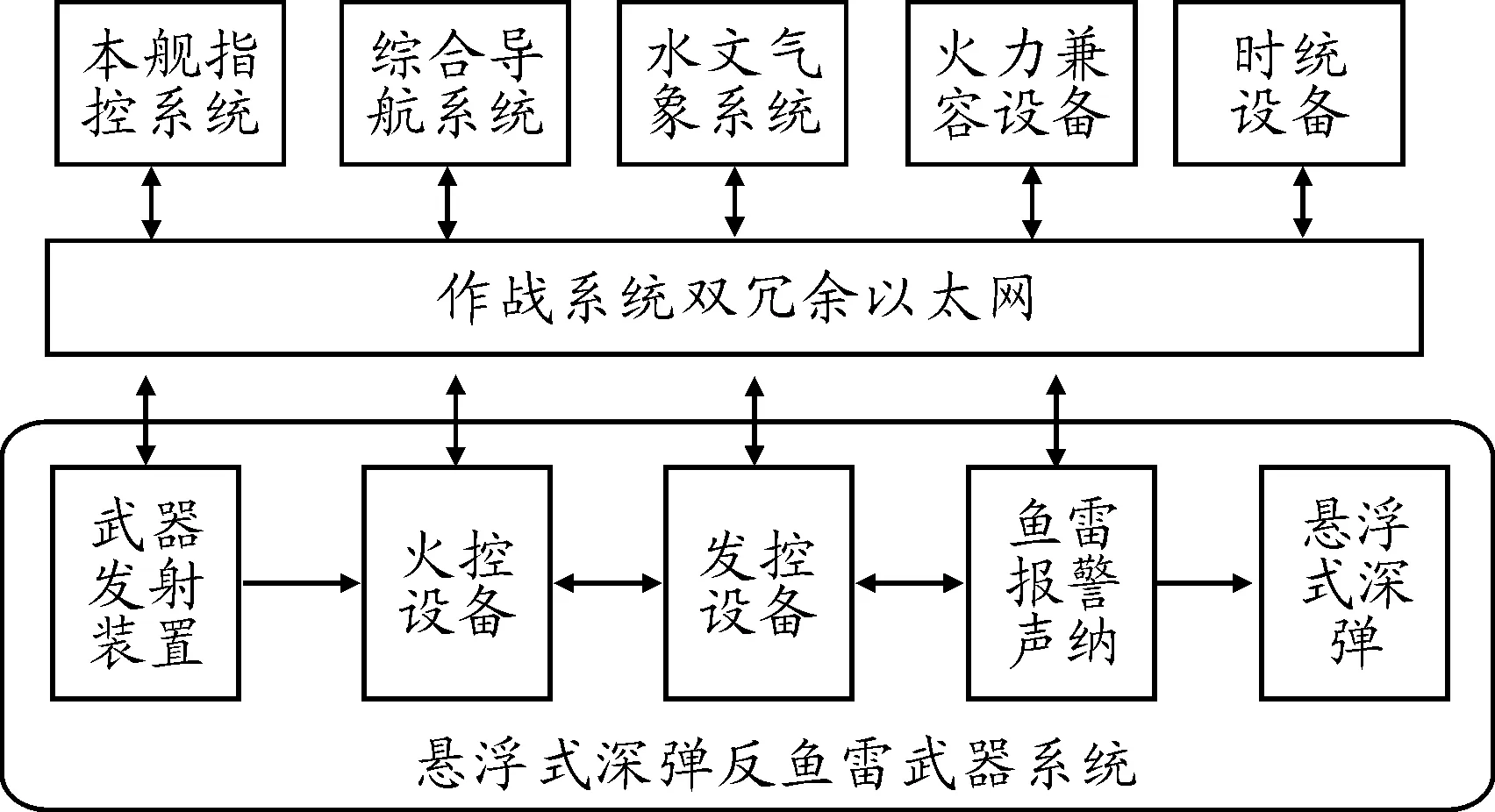
图1 系统组成及信息交互关系示意图
舰船航行过程中,当存在潜艇威胁时,由指挥员决策进行水下防御作战准备,组织布放鱼雷报警声纳,向发射装置装填悬浮式深弹,系统备便后,开始拦截鱼雷作战值班。当有鱼雷来袭时,其作战流程如下:
第一,鱼雷报警声纳探测到来袭鱼雷,发出鱼雷报警信号并向指控系统和火控设备发送来袭鱼雷的目标信息;
第二,指控系统向悬浮式深弹反鱼雷武器系统下达目标指示,火控设备接收目指信息后,综合本舰导航、水文、气象等信息,生成拦截来袭鱼雷的作战方案,输出各枚悬浮式深弹的射击诸元;
第三,发控设备和发射装置根据火控设备发送来的射击诸元控制发射悬浮式深弹;
第四,悬浮式深弹入水后开始工作,在来袭鱼雷航向的前方形成拦截阵;
第五,在悬浮式深弹的有效工作时间内,当鱼雷穿过该拦截阵时,声引信在鱼雷和深弹最近距离处启爆战斗部,毁伤来袭鱼雷。
2 仿真试验系统结构及功能设计
为实现对悬浮式深弹反鱼雷武器系统作战过程的仿真,依据前述系统组成及作战流程,考虑后续程序维护升级的需求,基于模块化的思想,设计了仿真试验系统。主要包含如下7个功能模块。
2.1“初始条件设置”模块
该模块通过设定仿真系统运行的4类参数,实现不同战场态势的模拟,同时还可设定“单次仿真”或“多次仿真”等仿真试验要求。4类参数具体如下:
本舰航向、航速;来袭鱼雷类型、航速、初始舷角、初始距离等鱼雷信息,并由此计算出其提前角和航向;系统反应时间、拦截弹从入水至展开所需时间、拦截弹有效工作时间、拦截弹数量、拦截弹布阵间隔、单发拦截弹毁伤半径等悬浮式深弹武器系统参数;水文条件等环境参数。
2.2“鱼雷命中判断”模块
仿真系统运行过程中,根据当前时刻鱼雷与舰船的距离,判定鱼雷是否命中舰船,从而控制程序工作流程。比如设定最小距离为20m,则当舰船与鱼雷距离小于20m时,则判定鱼雷命中舰船,拦截失败,结束该次仿真。
2.3“鱼雷探测”模块
该模块模拟鱼雷报警声呐功能,根据仿真系统设定的水文条件、当前时刻鱼雷与舰船的运动要素,判断舰船能否发现来袭鱼雷;如探测到来袭鱼雷,则发出鱼雷报警信号,同时模拟输出来袭鱼雷的舷角、估计距离等信息。
该模块执行上述仿真功能的依据是系统研制任务书中标明的鱼雷报警声呐装备在不同水文条件下的发现距离、报警概率、探测误差等性能指标。
2.4“发射条件判断”模块
该模块模拟火控系统的部分功能,在接到鱼雷报警信号后,融合“鱼雷探测”模块输出的来袭鱼雷舷角、估计距离、估计航速,本舰航向、航速,系统反应时间,悬浮式深弹射程、射界、飞行时间、工作时间等多种信息,并结合其他战术决策情况,判断在当前态势下经过系统反应时间后是否满足发射条件。
判断依据:1) 鱼雷通过拦截阵的预估时刻在拦截弹的有效工作时间内;2) 悬浮式深弹的布阵范围与预估鱼雷航迹相交。
2.5“悬浮式深弹布阵参数解算”模块
该模块模拟火控系统的主要功能,在经“发射条件判断”模块判断满足发射条件后,按照系统拦截弹布阵策略解算模型计算生成悬浮式深弹的使用方案(包括布阵方位、布阵位置、布阵宽度、拦截弹间距等参数),计算输出每枚悬浮式深弹的位置坐标。针对不同态势,采用不同的拦截策略。
鉴于该仿真系统的核心目的是计算拦截概率,该模块运行过程中,采用拦截模型解算出拦截弹阵理想布设位置坐标后再加入其落点散布误差,作为该模块的输出值,模拟实际悬浮式深弹的布阵情况。
2.6“舰船和鱼雷运动模拟”模块
模拟对抗过程中舰船和鱼雷的运动情况,输出两者的位置坐标、航向、航速等运动要素信息。其中,鱼雷运动模拟部分可根据仿真过程中鱼雷与目标相对位置、鱼雷自导状态等要素,模拟计算直航、声自导、尾流自导、线导+声自导、线导+尾流自导五种类型鱼雷的水下弹道。
2.7“拦截效果判断”模块
该模块在仿真系统运行过程中,接收到“悬浮式深弹布阵参数解算”模块输出的各枚悬浮式深弹位置坐标后,在悬浮式深弹的有效工作时间内,计算每一时刻鱼雷与每枚悬浮式深弹的距离,如该距离小于悬浮式深弹的有效杀伤半径,则判定鱼雷被毁伤,拦截成功,结束该次仿真。同时,在悬浮式深弹的有效工作时间内,计算每一时刻鱼雷与本舰距离和每枚拦截弹与本舰距离,如鱼雷与本舰距离小于拦截弹与本舰距离的最小值,则表明鱼雷已穿过拦截阵,判定拦截失败,结束此次仿真试验。
3 仿真试验系统实现及应用
3.1系统实现及工作流程
根据前述仿真试验系统结构及功能设计结果,在Windows环境下采用C#语言编写了仿真试验程序。系统运行时,首先进入主界面,如图2所示。在窗口左侧输入或选定各相关参数,再根据仿真试验需求,点击“单次仿真”或“多次仿真”按钮,进入仿真程序。其中,“单次仿真”时,按设定的态势仅进行一次仿真计算,并将仿真结果显示在主界面右侧。多次仿真时,需首先输入仿真试验次数(系统默认值为2 000次),然后点击“多次仿真”按钮,系统按设定的态势重复进行仿真计算,达到设定的仿真次数后,统计各次试验结果得出拦截概率值,并显示于“拦截概率”文本框中;同时将最后一次的仿真结果显示于主界面右侧。
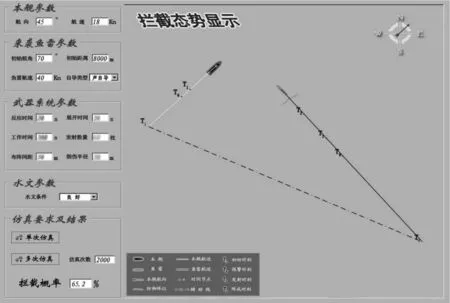
图2 仿真试验系统运行主界面
在每次仿真试验中,系统的工作流程如图3所示。
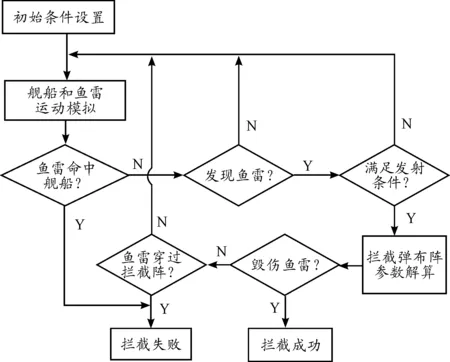
图3 仿真试验系统工作流程示意图
1) 执行“舰船和鱼雷运动模拟”模块功能,计算舰船和鱼雷位置坐标、鱼雷舷角、鱼雷航向等运动要素,进入流程2);
2) 执行“鱼雷命中判断”模块功能,根据当前时刻鱼雷与舰船的距离,判断鱼雷是否命中舰船,如命中,判定拦截失败,结束此次仿真试验,如鱼雷尚未命中舰船,则进入流程3);
3) 执行“鱼雷探测”模块功能,根据模块内部设置的判断条件、鱼雷与舰船相对位置信息以及水文信息,判断是否发现来袭鱼雷,如发现来袭鱼雷则执行流程4),如未发现来袭鱼雷,返回流程1)。
4) 执行“发射条件判断”模块功能,根据来袭鱼雷报警舷角、距离,本舰航速、航向,拦截弹射程、射界等信息,综合判断在时间和空间上是否具备发射条件,如满足发射条件,则进入流程5),如不满足发射条件,返回流程1);
5) 执行“悬浮式深弹布阵参数解算”模块功能,输出各枚悬浮式深弹位置坐标,进入流程6);
6) 执行“拦截效果判断”模块的部分功能,在悬浮式深弹有效工作时间内,判断能否毁伤来袭鱼雷,如成功毁伤来袭鱼雷,则判定拦截成功,结束此次仿真试验,如判断未毁伤鱼雷,则进入流程7);
7) 执行“拦截效果判断”模块的部分功能,判断鱼雷是否已穿过拦截阵,如穿过拦截阵,则判定拦截失败,结束此次仿真试验,如鱼雷尚未穿过拦截阵,则返回流程1)。
3.2应用实例
利用所研制的仿真试验系统,在本舰航速18kn条件下,对某型悬浮式深弹反鱼雷武器系统在中等和良好两种水文条件,对不同初始舷角处来袭的某型声自导鱼雷的拦截概率进行了仿真试验,结果如图4所示。

图4 拦截概率仿真试验结果
4 结论
依据悬浮式深弹反鱼雷武器系统的基本组成和作战流程,设计开发了一种仿真试验系统。主要包含7个功能模块,可实现对不同态势、不同环境条件下该武器系统对不同类型来袭鱼雷拦截概率的仿真计算。通过该仿真试验系统的实际应用,解决了某型悬浮式深弹反鱼雷武器系统试验中拦截概率指标考核需要大量样本,完全通过实航试验无法实现的难题。
参考文献:
[1]黄鑫,马曲立,曹阳.水面舰艇鱼雷防御系统近期发展趋势[J].舰船科学技术,2011,33(2):10-13.
[2]杨日杰,高学强,韩建辉.现代水声对抗技术与应用[M].北京:国防工业出版社,2008.
[3]田恒斗,金良安,迟卫.尾流自导鱼雷对抗技术现状与研究[J].火力与指挥控制,2010,35(10):36-39.
[4]陈春玉.反鱼雷技术[M].北京:国防工业出版社,2006.
[5]赵向涛,李文哲,寇祝.悬浮式深弹拦截鱼雷射击区域分析[J].四川兵工学报,2011,32(11):20-22.
[6]姚奉亮,贾跃,丁贝.悬浮式深弹拦截不确定型鱼雷作战模型研究[J].鱼雷技术,2011,19(1):63-67.
[7]闫岩,赵向涛.一种舰载反鱼雷深弹武器系统设想[J].四川兵工学报,2015,36(9):20-22.
[8]樊洪港,吴晓海,尤廷悦.悬浮式深弹反鱼雷系统作战效能分析[J].舰船电子工程,2009,29(10):44-47.
[9]田恒斗,侯宝娥,赵红光,等.悬浮式深弹反鱼雷武器系统作战效能试验评估方法[J].火力与指挥控制,2014,39(9):122-125.
[10]武小悦,刘琦.装备试验与评价[M].北京:国防工业出版社,2008.
(责任编辑周江川)
doi:10.11809/scbgxb2016.06.019
收稿日期:2015-12-26;修回日期:2016-01-29
基金项目:海军专项科研资助项目
作者简介:房毅(1972—),男,工程师,主要从事水中兵器试验及计算机应用等研究。
中图分类号:TJ65
文献标识码:A
文章编号:2096-2304(2016)06-0079-04
SimulationTestSystemDesignofHoveringDepthChargeAnti-TorpedoWeapon
FANGYi,TIANHeng-dou,HOUBao-e
(TheNo. 91439thTroopofPLA,Dalian116041,China)
Abstract:To meet the requirement of some hovering depth charge anti-torpedo weapon’s approval test, a simulation test system was designed according to equipment composition and campaign process. The system was based on the modular design method, and the main functions of seven modules and the workflow of the system were described in detail. An application shows that the system can realize the simulation test of the campaign process of the hovering depth charge anti-torpedo weapon against several types of incoming torpedo in different situations and water conditions. The difficult problem that a large amount of samples are always required to evaluate the intercepting probability was solved.
Key words:anti-torpedo weapon; hovering depth charge; simulation test system; design