半实物仿真红外干扰弹运动特性模拟方法研究
2016-08-12陈海燕王艳奎赵松庆吴根水
陈海燕,王艳奎,赵松庆,吴根水
(中国空空导弹研究院,河南 洛阳 471009)
半实物仿真红外干扰弹运动特性模拟方法研究
陈海燕,王艳奎,赵松庆,吴根水
(中国空空导弹研究院,河南 洛阳471009)
摘要:为了满足红外制导武器半实物仿真试验的需求,提出了一种使用红外动态景象模拟器模拟红外干扰弹运动特性的方法,建立了图像坐标系下目标-干扰运动学模型;采用MOS电阻阵列红外动态景象模拟器实现了干扰运动特性的模拟,成功应用于某型红外制导武器半实物仿真试验。
关键词:红外动态景象模拟器;干扰运动学建模;半实物仿真
本文引用格式:陈海燕,王艳奎,赵松庆,等.半实物仿真红外干扰弹运动特性模拟方法研究[J].兵器装备工程学报,2016(6):69-71.
Citation format:CHEN Hai-yan, WANG Yan-kui, ZHAO Song-qing, et al.Research on the Infra-Red Jamming Cartridge Kinematic Modeling and Simulation[J].Journal of Ordnance Equipment Engineering,2016(6):69-71.
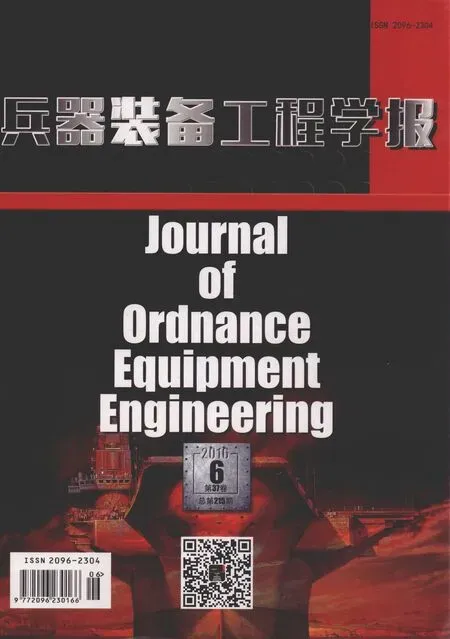
红外制导武器发展到第四代先进红外成像制导模式,导引头可以输出红外图像,根据导引头采集的红外图像可以分析导引头工作状态。第二、三代红外制导武器半实物仿真试验中,通常采用点源目标模拟器,点源目标模拟器对于目标、干扰的模拟通常采用分光路生成再通过半透半反镜合成的方式实现,控制半透半反镜摆动,可以实现干扰与目标的分离以及干扰的运动(图1 给出了点源目标干扰模拟原理框图)。此种干扰运动特性模拟方式结构较复杂,安装在转台上重量较重,无法实现多个干扰。随着第四代红外成像制导武器的出现,以及红外动态景象模拟器的成功研制,如何在实验室采用红外动态景像模拟器直接模拟目标、干扰及其相对运动成为现实所需[1-2]。
在红外制导武器制导系统半实物仿真试验中,需要对整个弹道过程中目标、干扰的红外特性及其运动特性进行模拟。本文通过建立目标-干扰相对运动学模型,以MOS电阻阵列红外动态景象模拟器[3-4]为基础介绍了一种干扰运动特性模拟的新方法。
1 基于MOS电阻阵列的红外动态景象模拟器工作原理
红外动态景象模拟器是用来在实验室模拟真实目标、干扰的红外辐射特性和姿态运动特性,对武器系统性能测试和评估。它通常由图像生成计算机、控制驱动器、MOS电阻阵列红外动态景象生成器和红外光学匹配投射系统组成。其系统组成方框图见图2。其中红外动态景象生成器是红外动态景象模拟器的关键器件,它在控制驱动器的作用下产生所需红外动态景象。
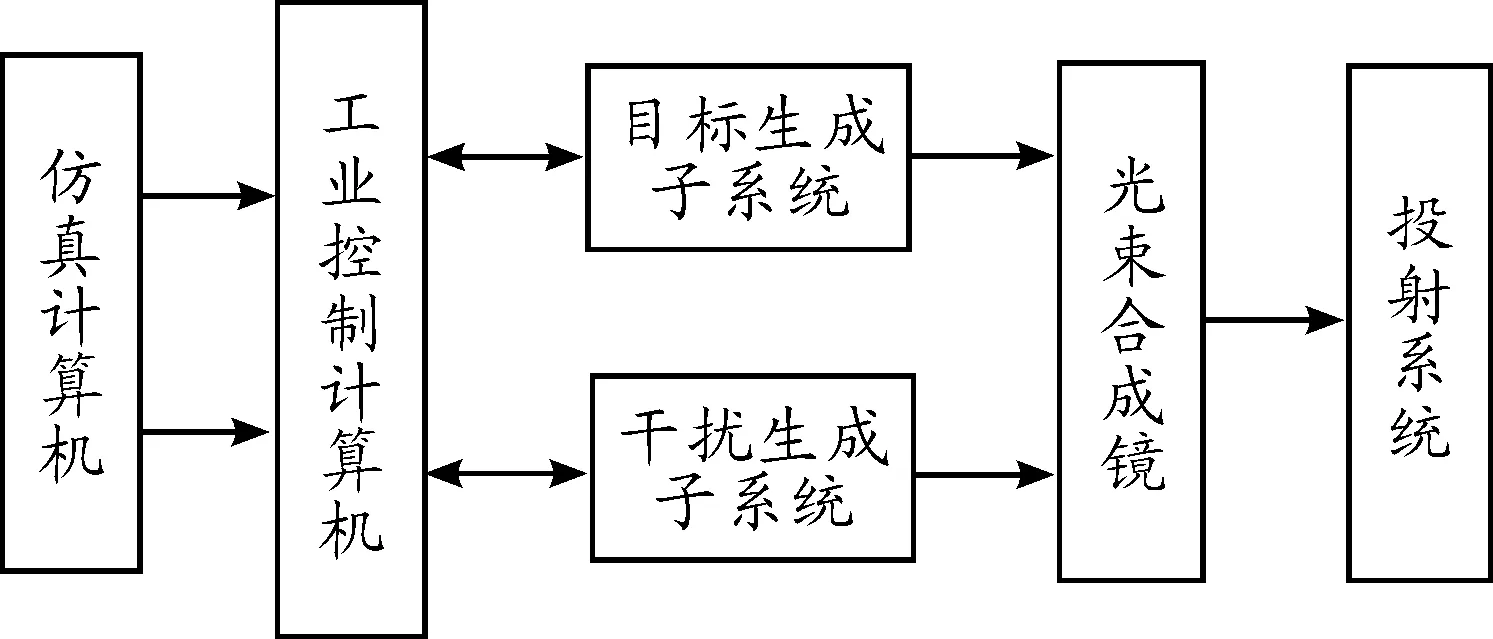
图1 点源目标干扰模拟原理框图
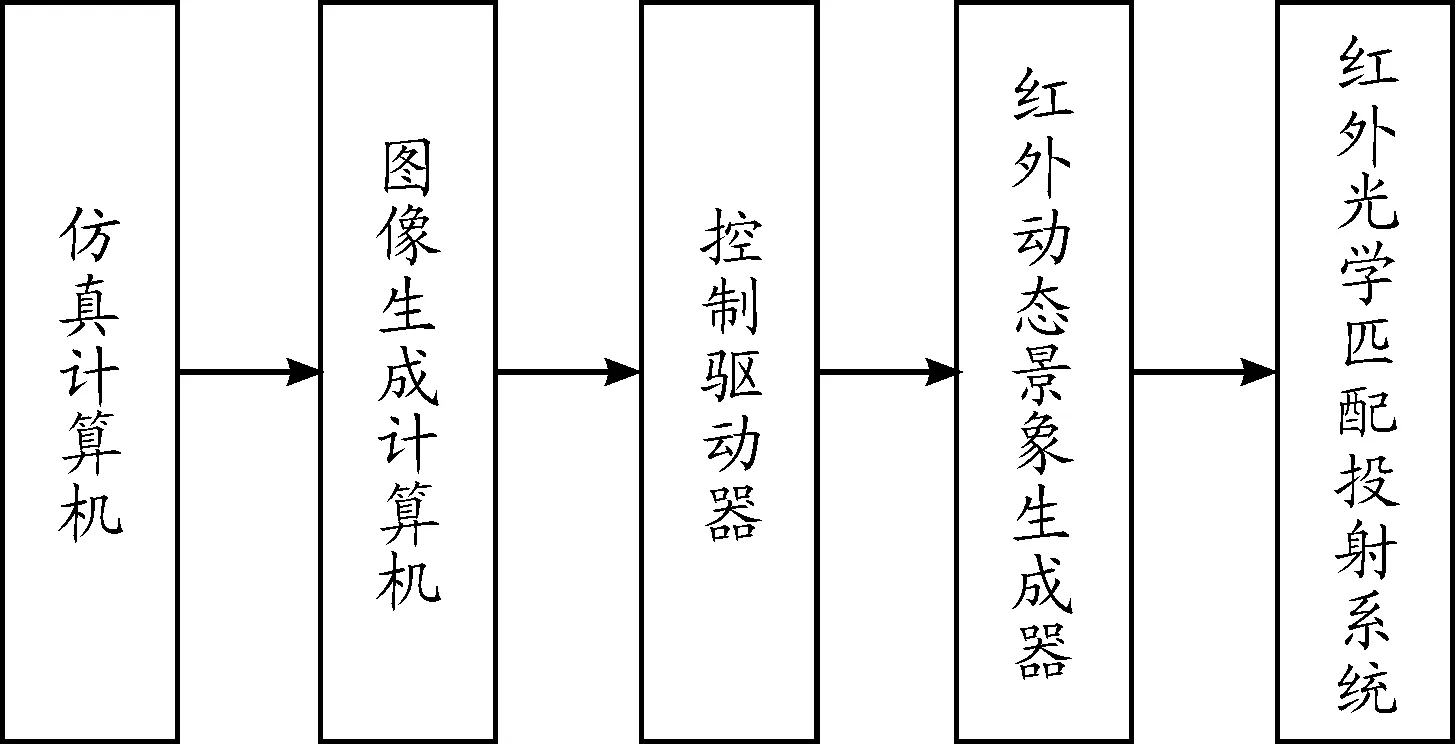
图2 红外动态景象模拟器系统方框图
图像生成计算机接收仿真计算机锁定的目标与导弹的位置和姿态信息、大气参数,依据目标环境特性参数,计算出红外目标环境的图像数据。图像逻辑控制及驱动器接收图像生成计算机给出的红外目标的图像数据,通过控制器的格式转换,将数据送往驱动器,与此同时,控制器还要给驱动器产生MOS电阻阵所需要的行、列扫描信号,由驱动器驱动MOS电阻阵产生红外热图。最后,MOS电阻阵列红外图像转换器生成的红外目标环境动态热图经红外光学匹配投射系统传输给红外成像制导武器系统,经光学接收系统成像于武器系统焦平面上。
图3为某红外成像半实物仿真系统图片。红外动态景象生成器和光学匹配投射系统安装在外两轴框架上,红外制导武器安装在三轴转台上,共同构成五轴转台式半实物仿真系统[5]。

图3 五轴转台式红外半实物仿真系统
2 干扰运动模型建立
在实验室对干扰的运动特性进行模拟,实际上是模拟制导武器所处位置探测到的二维图像中目标、干扰的相对运动。根据导弹、目标、干扰相对运动学原理可以建立干扰的运动模型。首先,根据干扰的初始位置和初始速度,并考虑干扰投放后空气阻力和重力对其影响,建立干扰在惯性系下的运动学模型。然后结合目标、导弹在惯性系下的位置,建立干扰及目标在转台框架系下的相对运动学模型。最后利用成像原理建立目标和干扰在红外动态景象模拟器图像坐标系下的运动学模型[6-10]。图4为干扰运动轨迹模型计算流程图。
图4 干扰运动轨迹模型计算流程
2.1惯性系下干扰运动学模型
由干扰投放时刻目标位置信息确定出干扰在惯性系下的初始位置、目标的速度信息和干扰投放速度确定干扰在惯性下的初始速度。考虑干扰在运动过程中所受空气阻力F和重力G的影响,可得干扰运动学模型:
式(2)中:dt为计算步长;rf、vf分别为干扰弹的位置和速度;a为干扰弹加速度。
2.2转台框架坐标系目标干扰相对运动学模型
依据红外制导系统半实物仿真实验室的试验方法,试验都是在五轴转台上完成。模拟场景是由安装在外两轴上的红外动态景象模拟器产生的。在建立实验室干扰轨迹模型时,需要把惯性系下计算的干扰位置和速度模型转换到转台框架坐标系,得到转台框架坐标系干扰运动轨迹模型。转换时依据目标两个框架的角度可以得到转台框架坐标系目标-干扰相对运动学模型:
(3)
(4)

2.3图像坐标系目标干扰相对运动学模型
根据场景模拟器光学系统的焦距和干扰相对导弹的位置将干扰相对目标位置折算到目标模拟器的电阻阵平面,即图像坐标系上,如图5所示。按折算后的位置坐标控制电阻阵完成干扰运动轨迹图像的生成。
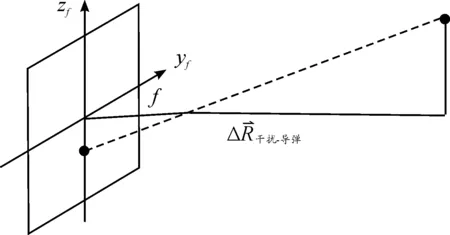
图5 坐标转换关系示意图
图像坐标系中干扰相对目标的位置:
(5)
3 干扰运动特性的实现
实验室模拟的目标在整个弹道过程中始终处于场景模拟器的固定位置,一般在中心位置,干扰从目标上分离出,实验室模拟干扰的运动实际上是目标-干扰的相对运动。
应用MOS电阻阵列红外动态景象模拟器实现干扰运动特性的模拟,首先要把目标干扰相对运动学模型写入图像生成计算机,完成干扰运动控制模块软件。
然后完成动态景象模拟器生成图像方向的标定。因为景象模拟器生成图像的方向除了与光学系统成像方向有关,还与电阻阵列芯片安装方向和驱动方向相关,要保证模拟干扰的投放方向与设置方向一致,需要完成模拟器生成图像方向的标定。若不一致,则要在式(5)的基础上做方向变换。
生成图像时,图像生成计算机接收仿真计算机实时解算的目标速度、位置信息,导弹速度、位置信息,并依据干扰投放模式要求,包括干扰投放时刻,投放个数,投放间隔,投放方向,投放速度等。通过干扰运动模型解算,计算出每帧数据下目标干扰在景象模拟器上的位置信息。图像逻辑控制及驱动器接收图像生成计算机给出的红外目标干扰的图像数据,通过控制器的格式转换,将数据送往驱动器。与此同时,控制器还要给驱动器产生MOS电阻阵所需要的行、列扫描信号,由驱动器驱动MOS电阻阵产生红外热图。最后,MOS电阻阵列红外图像转换器生成的红外目标环境动态热图经红外光学匹配投射系统传输给红外成像制导武器系统,经其光学接收系统成像于武器系统焦平面上。一般情况下,仿真机仿真周期较短,约0.5~1 ms,目前场景模拟器周期约5~7 ms,图像生成计算机实时接收仿真机数据时,需要考虑周期同步问题。
图6就是应用128×128 MOS电阻阵列景象模拟器生成并经某型红外成像导引头探测后输出的目标干扰图像。图中左1像点为目标,其余均为干扰。
4 结论
本文通过建立干扰的运动轨迹模型,提出了在动态景象生成器上模拟目标-干扰相对运动的方法,并在MOS电阻阵列红外动态景象模拟器上实现了干扰运动特性的逼真模拟,为红外制导武器系统全弹道仿真试验及导引头抗干扰算法验证提供了可行的试验验证手段。
参考文献:
[1]东瑞,董国才,沈猛.红外成像制导半实物仿真系统研究[J].系统仿真学报,2008,20(8):2027-2029.
[2]吴根水,屠宁,赵松庆,等.红外成像制导空空导弹半实物仿真技术研究[J].航空科学技术,2011(3):58-60.
[3]赵松庆,吴根水,崔彬.128×128元MOS微电阻阵列动态景像模拟器[C]//空空导弹研究院庆祝建院45周年论文集.[出版地点和出版社不详],2006.
[4]董敏周,王建华,孙力,等.基于MOS电阻阵列的红外目标模拟生成系统[J].红外与激光工程,2008,37(3):411-415.
[5]赵松庆.基于五轴转台红外目标/干扰模拟器的实施方案[J].航空兵器,2005(1):23-26.
[6]朱敏,陈宇,杨春玲.红外诱饵弹干扰特性有限元建模[J].红外与激光工程,2013,42(8):1979-1986.
[7]牛绿伟,董景渲.机载红外诱饵弹干扰效果研究与仿真[J].计算机仿真,2013,30(2):21-24.
[8]曲长文,李亚南.机载无源干扰诱饵的运动特性研究[J].现代防御技术,2012,40(2):98-103.
[9]郭亚峰,吴庆宪,姜长生.红外诱饵弹的视景仿真[J].电光与控制,2012,19(7):41-43.
[10]李凡,张励,李艳红,等.基于多源红外模拟器的导弹抗干扰仿真与评估技术[J].航天电子对抗,2014,30(6):1-3.
(责任编辑周江川)
doi:10.11809/scbgxb2016.06.016
收稿日期:2016-01-31;修回日期:2016-02-25
作者简介:陈海燕(1981—),女,工程师,主要从事制导与控制系统仿真研究。
中图分类号:V216.7
文献标识码:A
文章编号:2096-2304(2016)06-0069-03
Research on the Infra-Red Jamming Cartridge Kinematic Modeling and Simulation
CHEN Hai-yan, WANG Yan-kui, ZHAO Song-qing, WU Gen-shui
(China Airborne Missile Academy, Luoyang 471009, China)
Abstract:In order to test the infrared imaging guidance missiles in hardware-in-the-loop simulation, the method of the infra-red jamming cartridge kinematic simulation with the infrared dynamic scene simulator was given. The jamming cartridge kinematic model in the image coordinate system was built. The jamming’s moving was simulated with the MOS resistor array infrared dynamic scene simulator. This method was successfully used in one of the infrared imaging guidance missile’s hardware-in-the-loop simulation.
Key words:infrared dynamic scene simulator; kinematic modeling of the jamming; hardware-in-the-loop simulation