基于行驶状态估计的车车协同纵向安全距离模型
2016-08-02唐自强龚贤武王玮琳
潘 勇,唐自强,龚贤武,唐 超,王玮琳
(1.长安大学 信息工程学院,陕西 西安 710064;2.智能交通技术交通行业重点实验室,北京 100088;3.长安大学 汽车学院,陕西 西安 710064;4.长安大学 电子与控制工程学院,陕西 西安 710064)
基于行驶状态估计的车车协同纵向安全距离模型
潘勇1,2,唐自强3,龚贤武4,唐超4,王玮琳4
(1.长安大学信息工程学院,陕西西安710064;2.智能交通技术交通行业重点实验室,北京100088;3.长安大学汽车学院,陕西西安710064;4.长安大学电子与控制工程学院,陕西西安710064)
摘要:针对提高车车协同下车辆纵向避撞系统的性能,提出了基于车辆行驶状态估计的车车协同纵向避撞安全距离模型。首先,通过建立考虑车辆前、后轴中点位置的汽车运动学模型以及车辆行驶状态参数估计的状态方程,采用扩展卡尔曼滤波方法实现车辆行驶状态的准确估计。接着在车辆状态参数准确估计的基础上,针对前车运动状态,分别建立了基于车车协同下前车静止、前车匀速行驶以及前车减速制动下的车辆纵向避撞系统的安全距离模型。并基于Matlab/Simulink搭建了汽车行驶状态估计以及纵向避撞系统安全距离模型的仿真平台。仿真结果证明了车辆行驶状态估计的准确性以及纵向避撞安全距离模型的有效性。
关键词:汽车工程;纵向避撞;状态估计;安全距离模型;扩展卡尔曼滤波;车车协同
0引言
据统计,汽车追尾事故约占全部交通事故的75%以上[1],因此面向未来智能交通系统环境下,开发车车协同车辆纵向避撞系统显得十分必要。车辆纵向避撞系统作为驾驶员辅助安全控制系统,整个纵向避撞系统功能实现的前提是快速准确判断和预估当前车辆行驶状态,并通过车车通信技术实现车辆状态信息之间的交互,以及建立考虑驾驶员驾驶特性和路面实际状况的安全距离模型[2-3]。
关于车车协同下车辆纵向避撞系统的研究中,YasuhiroSato[4]等基于车车通信下搭建了车车前向避撞支持系统,JihuaHuang和Han-ShueTan[5-6]提出了基于DGPS的车车协同碰撞预警系统,然而上述研究中提出的避免车车冲突安全距离算法没有考虑驾驶员的驾驶特性和路面实际情况,实际应用性较低。许伦辉[7]等建立了跟随车与前导车不发生追尾碰撞的最小安全距离模型。孙斌[8]在充分考虑人-车-路复杂交通环境和我国驾驶员个性特征的前提下,对最小安全距离和危险距离进行了重新界定和量化。但许伦辉[7]和孙斌[8]建立的安全距离模型是基于传统道路交通应用环境,并不完全适用于车车协同下的应用要求,同时没有对车辆状态参数的准确获取进行研究,而车辆行驶状态的精确识别和估计是车车协同下车辆碰撞预警系统的基础,对车辆碰撞预警系统可靠性影响重大。因此为了提高车车协同下车辆纵向避撞系统的性能要求,本文通过建立汽车运动学模型以及车辆状态参数估计的状态方程,采用扩展卡尔曼滤波方法实现了车辆行驶状态参数的准确估计,建立了考虑驾驶员驾驶特性以及路面实际状况的安全距离模型,并基于Matlab/Simulink搭建了汽车行驶状态估计以及纵向避撞系统安全距离模型的仿真平台,通过仿真分析验证了车辆行驶状态估计的准确性以及纵向避撞安全距离模型的有效性。
1车辆运动学模型
目前车辆行驶状态估计方法主要有基于运动学模型的估计方法和基于动力学的估计方法[9]。基于运动学的估计方法通过传感器与车辆运动学模型估计器进行状态估计,该方法不受车辆动力学状态变化的影响,鲁棒性较好,缺陷是该方法严重依赖传感器的测量精度,需及时消除累积积分误差的影响,但通过多信息融合的方法可以有效解决该缺陷。因此本文通过建立汽车运动学模型,结合车内传感器和车载GPS数据,采用扩展卡尔曼滤波方法对车车协同下车辆行驶状态进行实时精确估计,估计方案如图1所示。在安装有GPS车辆系统中包括了GPS坐标系、车辆坐标系、世界坐标系。由于车辆坐标系和GPS坐标系之间的关系在GPS天线安装时已经确定,所以可以将GPS坐标系统移到车辆坐标系当中。因此坐标系可以简化为2个,即世界坐标系(X,Y)和车辆坐标系(Xv,Yv),如图2所示。
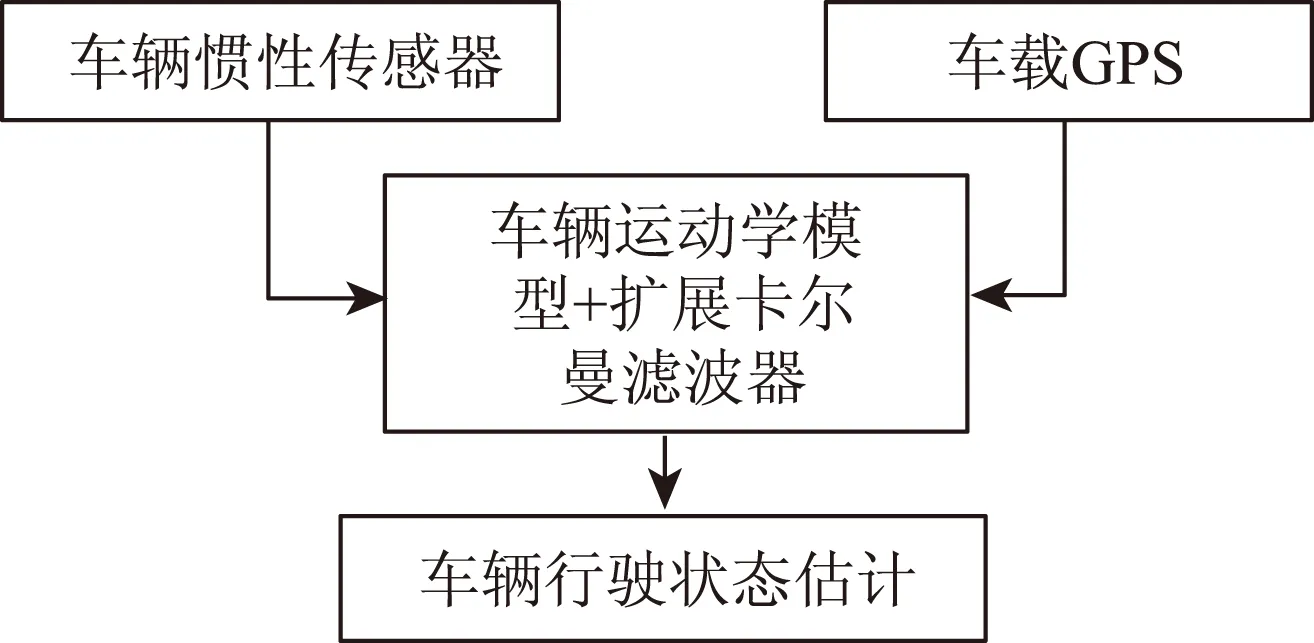
图1 基于EKF的车辆行驶状态估计方案Fig.1 Scheme of vehicle driving state estimation based on EKF
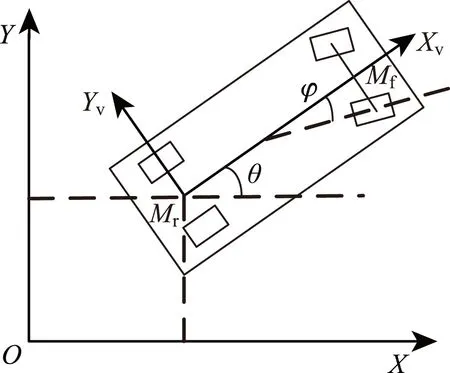
图2 世界坐标系与车辆坐标系Fig.2 World coordinate system and vehicle coordinate system
忽略汽车侧倾、俯仰和垂直运动后,车车协同下车辆行驶状态可通过车辆位置、速度、加速度、航向角和转向角等来表示。确定汽车运动轨迹(位置和航向角)的关键因素是建立准确的车辆运动学模型[10],而汽车是一个强非线性系统,这些运动参数变量可由车载传感器和车载GPS获得[11]。为全面描述汽车在平面内的位姿,选取后轴中点Mr(xr, yr)为车辆坐标系的原点,Mf(xf, yf)为前轴中点坐标[12-13],如图2所示,其中前、后轴中点坐标的关系为
(1)
式中,θ为车辆航向角,即车辆坐标系与世界坐标系夹角;l为车辆轴距。
因此ti时刻车辆行驶状态可以用向量Xr_i和Xf_i表示为:
(2)
(3)
车辆从ti时刻到ti+1时刻的车辆行驶状态可以表示为:
(4)
(5)
(6)
(7)
(8)
(9)
式中,v为车辆纵向速度;a为车辆纵向加速度;φ为前轮转向角。
2基于EKF的车辆行驶状态估计方法
基于EKF的车辆行驶状态估计方法的具体估计流程如下。
(1)建立系统状态方程
根据车车协同下对于车辆行驶状态参数的估计要求,本文建立的车辆系统状态方程中包括了8个状态量,分别是汽车后轴中点x轴坐标位置xr,后轴中点y轴坐标位置yr,车辆纵向速度v,车辆纵向加速度a,车辆航向角θ,前轮转向角φ,前轴中点x轴坐标位置xf,前轴中点y轴坐标位置yf,同时系统状态方程中还应加入噪声量wi。根据车辆运动学模型,令Δt=ti+1-ti,当Δt较小时,车辆的行驶状态可表示为:
(10)
(11)
式中,w1和w2为输入系统状态的随机干扰量,且是零均值、白色高斯噪声。此时系统协方差Q为:
(12)
(13)
(2)建立系统观测方程

(14)
式中,si+1为观测噪声量且是零均值、白色高斯噪声,s1,s2分别为车辆后轴中点在x方向和y方向上的观测噪声;s3为车辆航向角观测噪声。其中协方差R为:
(15)
(3)计算以下偏微分矩阵Fi与Li。
(16)
(17)
(4)对车辆初始状态X0以及协方差P0进行初始化。
(18)
(19)
(6)计算如下偏微分矩阵Hi+1与Mi+1。
(20)
(21)
(7)状态观测更新、误差协方差更新以及状态后验估计为:
(22)
(23)
(24)

3车辆纵向避撞系统的安全距离模型
车车协同下车辆纵向避撞系统的工作过程中,车辆不断通过EKF实现车辆状态参数的准确估计,并通过车载信息交互单元将自车的行驶状态与他车之间进行信息交互,根据交互的车辆状态信息,建立如式(25)所示的纵向避撞系统安全距离模型,并将其表示于如图3所示的安全距离模型坐标系中。安全距离模型中考虑了驾驶员特性和路面附着系数的影响,且假定各车制动性能相同,忽略反应时间内制动力变化以及驾驶员反应到开始制动时间内的车速变化。
(25)
图3及式(25)中,D为两车初始车距;Dbr为极限安全距离;D1为后车与前车相对静止时,后车行驶的距离;D2为前车行驶的距离;d0为后车与前车相对静止时,保持的最小间距;Dw为避撞系统预警安全距离;Tm为预警模块产生、传输和读取预警信息所需的时间;Tr为驾驶员反应时间;Ts为制动系统延迟时间;vrel为两车相对速度。

图3 安全距离模型的坐标表示Fig.3 Coordinate representation of safety distance model
车速越高需要保持的最小车距d0也越大,同时最小车距还与地面附着系数ψ成反比关系,因此定义最小车距d0为:
(26)
式中,v1为后车速度;k为22.5;b为0.3;ψ为路面附着系数。
根据前车运动状态将纵向避撞系统安全距离模型分为前车静止、前车匀速行驶以及前车减速制动3种情况分别加以讨论。
3.1前车静止
当后车根据交互的车辆状态信息发现前车静止时,后车从报警到开始制动,最终停在距前车d0位置。当后车速度低于50km/h,驾驶员反应时间和制动系统延迟时间可忽略不计,建立纵向避撞系统的安全距离模型为:
(27)
式中a1为后车制动减速度。
3.2前车匀速运动
当后车发现前车保持匀速行驶状态时,此时根据两车车速大小又可以分为:(1)后车速度小于前车,此状态下如果前车在一段时间内不减速行驶,且后车不加速行驶,则属于安全状态,不会发生碰撞;(2)后车速度大于前车,如果两车一直保持此相对状态,后车将会追上前车,两车发生碰撞的潜在危险性不断增加。此时后车驾驶员若及时调整车速,则可消除碰撞危险。因此建立纵向避撞安全距离模型为:
(28)
3.3前车减速制动
当后车发现前车处于减速状态时,此时根据两车车速大小,纵向避撞安全距离模型又可分为三种情况:
(1)后车车速大于前车
在前车制动过程中,若后车不采取任何措施,将会增加两车碰撞风险,因此建立纵向避撞安全距离模型为:
(29)
式中,v2为前车速度;a2为前车减速度。
(2)后车车速等于前车
这种情况与情况(1)类似,因此建立纵向避撞安全距离模型为:
(30)
(3)后车车速小于前车
当后车速度小于前车时属于暂时相对安全状态,如果前车一直减速直到与后车车速相同,可按照情况(2)进行处理。
由以上分析可见,无论前、后车运动状态如何,安全距离的合理选取是保证纵向防撞的关键。纵向防撞控制策略就是根据前车运动状态,使后车驾驶员采取合理的制动减速措施,实现两车的相对运动速度为0,并最终保持给定的安全距离。
4车辆纵向避撞预警系统的仿真分析
为了验证本文提出的汽车行驶状态估计算法的准确性以及纵向避撞系统安全距离模型的有效性,基于Matlab/Simulink搭建了汽车行驶状态估计以及纵向避撞系统安全距离模型验证仿真平台。
4.1车辆行驶状态估计仿真分析
仿真设置:车辆绕坐标点(2,2)做匀速圆周运动,初始时刻状态分别为xr=-2m,yr=-2m,v=0.25m/s,ai=0,θ=162.06°,xf=-4.59m,yf=-1.16m,φ=arctan2.06,l=2 725mm。搭建的车辆行驶状态估计仿真平台如图4所示,其中Xhat为EKF估计输出数值。
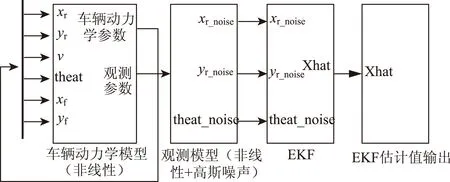
图4 基于EKF的车辆行驶状态估计仿真平台Fig.4 Simulation platform of vehicle driving state estimation based on EKF
图5给出了车辆前、后轴中点实际位置和基于EKF的车辆前、后轴中点位置的估计情况。从图5中可以看出车辆绕定点做匀速圆周运动下,采用基于EKF的车辆前、后轴中点位置预估的准确性较好,其中前轴平均估计误差率为0.53%,后轴平均估计误差率为0.94%。
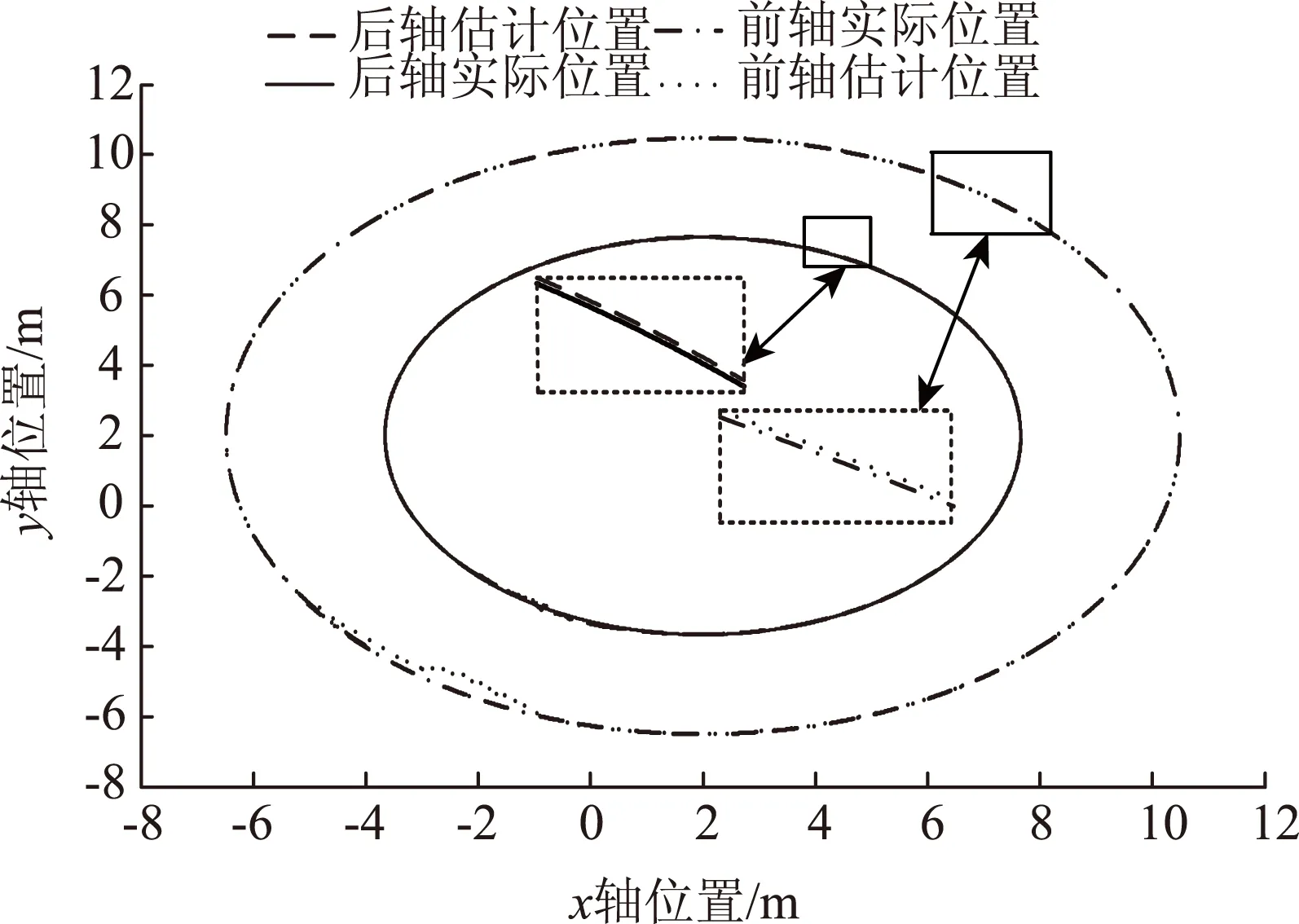
图5 车辆后轴/前轴中点实际位置与预估位置Fig.5 Actual position and estimated position of vehicle rear axle/front axle midpoints
4.2车辆纵向避撞预警系统的安全距离仿真分析
根据后车制动减速度大小,设定保守模式下制动减速度a1=-3.43m/s2;冒险模式下制动减速度a1=-4m/s2。针对前车静止、前车匀速以及前车减速制动3种情况,搭建仿真平台进行仿真分析,仿真过程中相关仿真参数值如表1所示。
表1纵向碰撞预警系统仿真参数
Tab.1Simulationparametersoflongitudinalcollisionwarningsystem
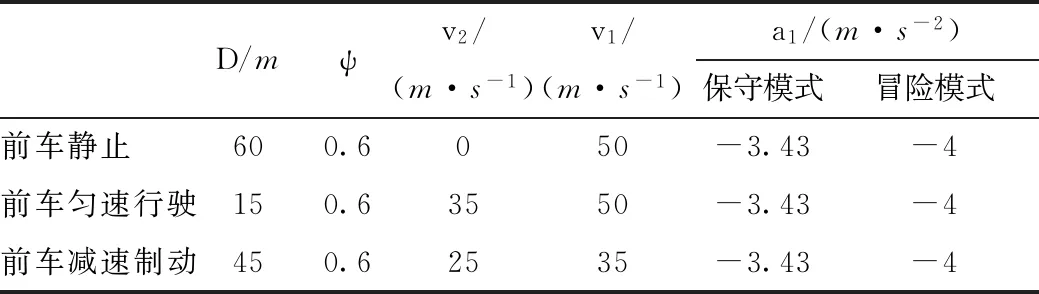
D/mψv2/(m·s-1)v1/(m·s-1)a1/(m·s-2)保守模式冒险模式前车静止600.6050-3.43-4前车匀速行驶150.63550-3.43-4前车减速制动450.62535-3.43-4
前车静止情况下,后车驾驶员在保守模式和冒险模式下安全距离仿真模型仿真曲线如图6所示,两种驾驶模式下两车相对速度变化曲线如图7所示。由图7可知,当前、后两车之间距离大于预警距离Dw时,后车保持原来行驶状态;当前、后两车距离小于预警距离Dw时,纵向避撞系统提醒驾驶员采取减速反应,此时驾驶员若没有采取减速反应,当两车之间距离达到设置驾驶模式(保守模式和冒险模式)下的极限安全距离Dbr,碰撞预警系统控制车辆以相应制动减速度减速停车,相比冒险模式,保守模式制动时间更长,制动更为平缓。由图6可知,两种模式下后车最终都停在距离前车2.5m处。
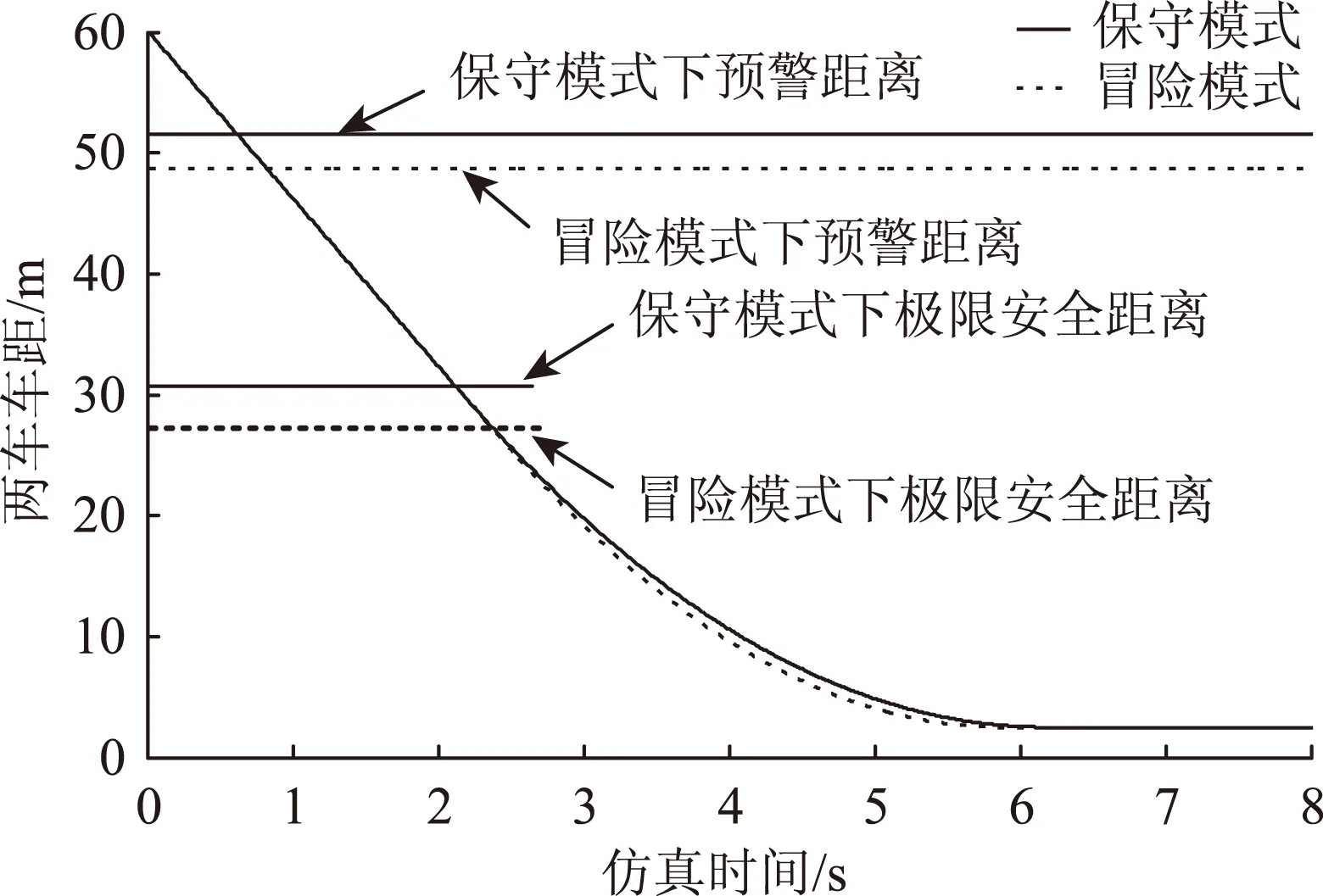
图6 前车静止下安全距离模型仿真曲线Fig.6 Simulation curves of safety distance model when front vehicle is static
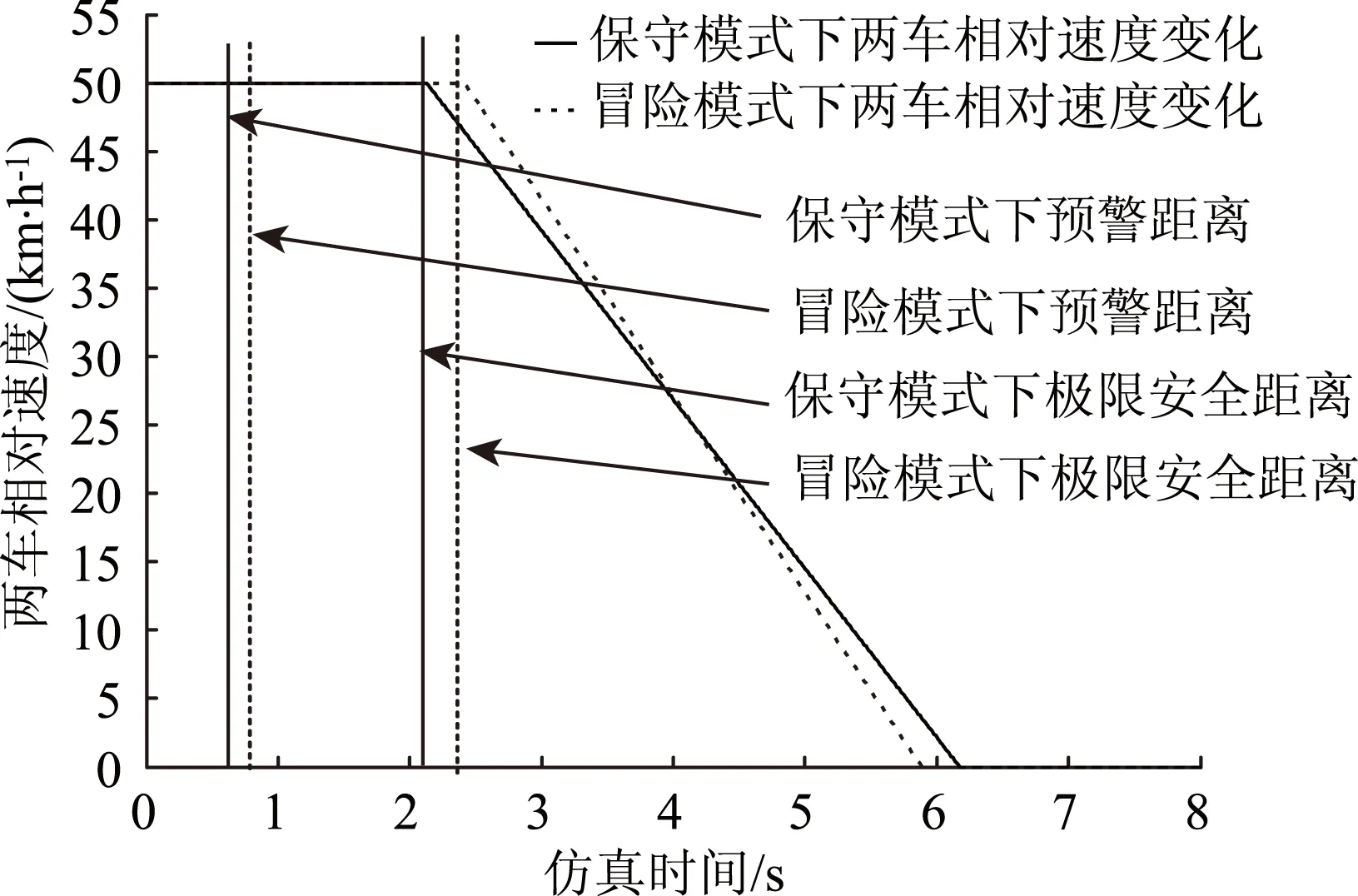
图7 前车静止下两车相对速度变化曲线Fig.7 Relative speed curves of 2 vehicles when front vehicle is static
前车匀速情况下,当后车速度大于前车时,碰撞预警系统依据相应的制动减速度减速行驶直到两车相对速度为0,后车在保守模式和冒险模式下的安全距离仿真模型仿真曲线如图8所示。由图8可知,两车相对速度为0时,两种驾驶模式下两车的车间距都是2.23m。图9为前车匀速行驶下的两车车速变化曲线,可以看出两种模式下,最终均可实现前、后两车车速相同,并且可以有效避撞。
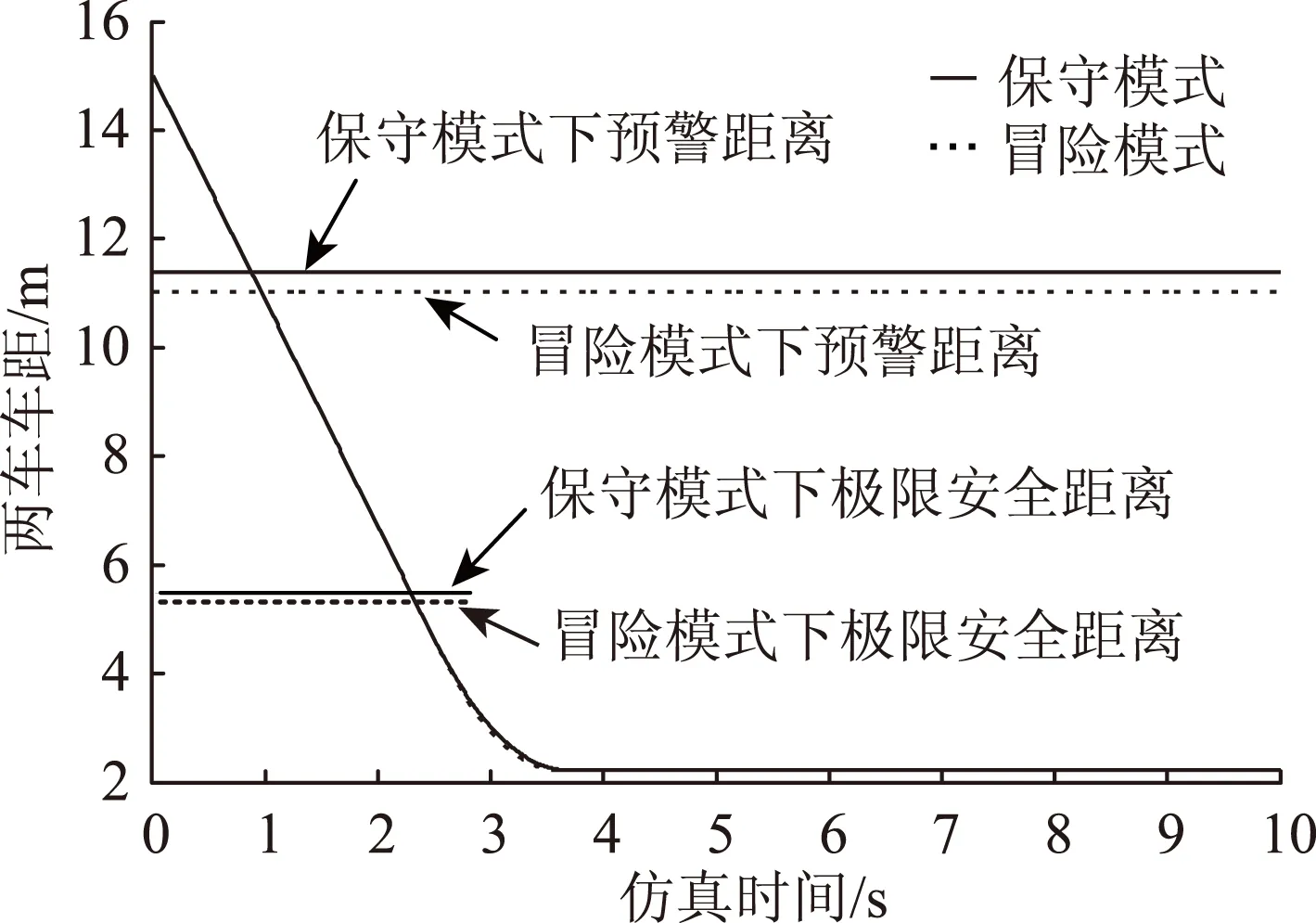
图8 前车匀速下安全距离模型仿真曲线Fig.8 Simulation curves of safety distance model when front vehicle driving at constant speed
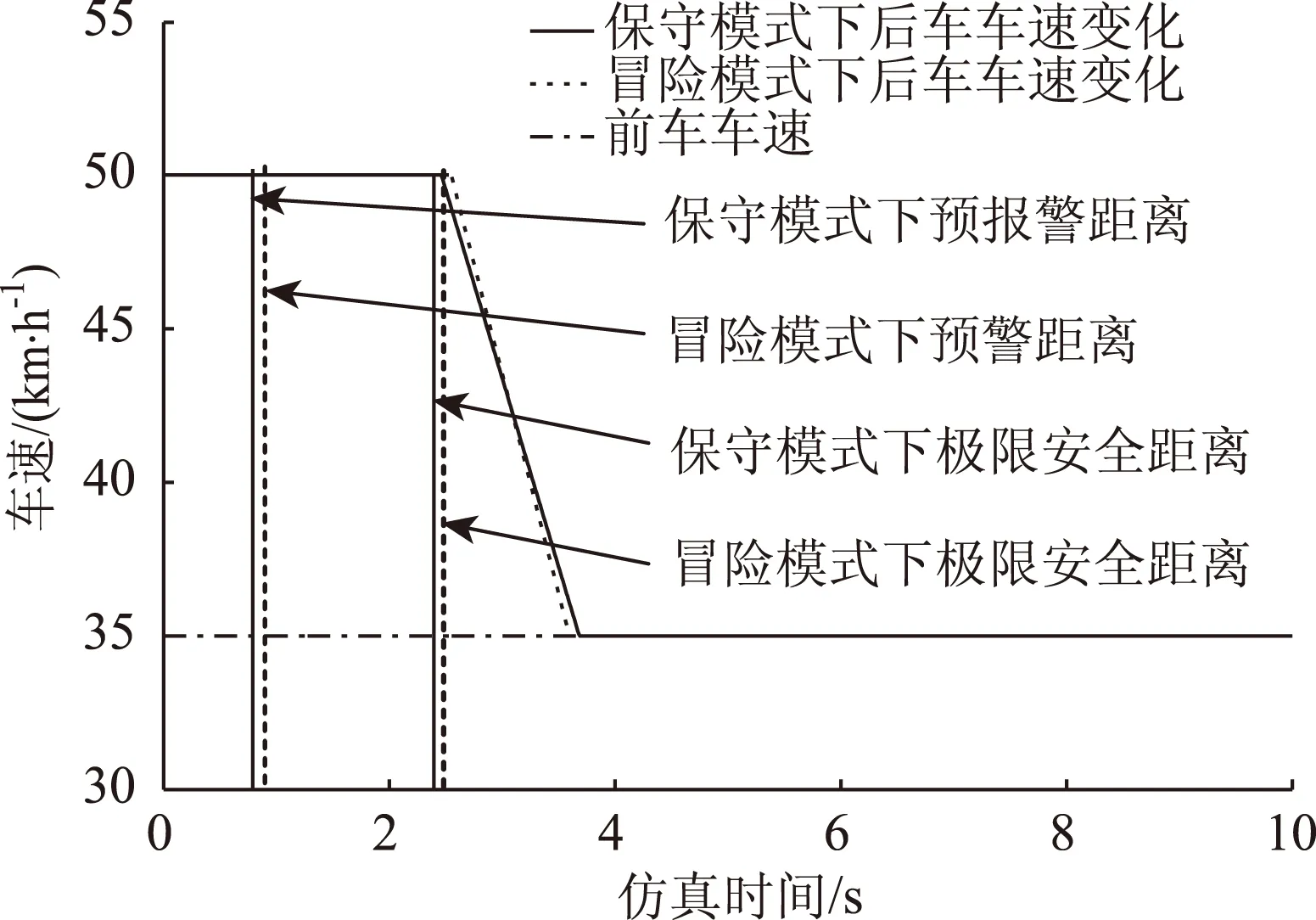
图9 前车匀速下两车车速变化曲线Fig.9 Speed curves of 2 vehicles when front vehicle driving at constant speed
前车紧急减速制动情况下(a2=ψg,g为重力加速度),当后车速度大于前车且两车车距小于Dbr时,后车驾驶员在保守模式和冒险模式下的安全距离仿真模型仿真曲线如图10所示。图11给出了前车紧急制动下两车车速变化曲线,由图10、图11可知,前车紧急制动且后车速度大于前车时,驾驶员采用两种不同驾驶模式下,两车最终停止时的车间距都是1.23m,从而实现了前车紧急制动情况下的车辆纵向防撞要求。
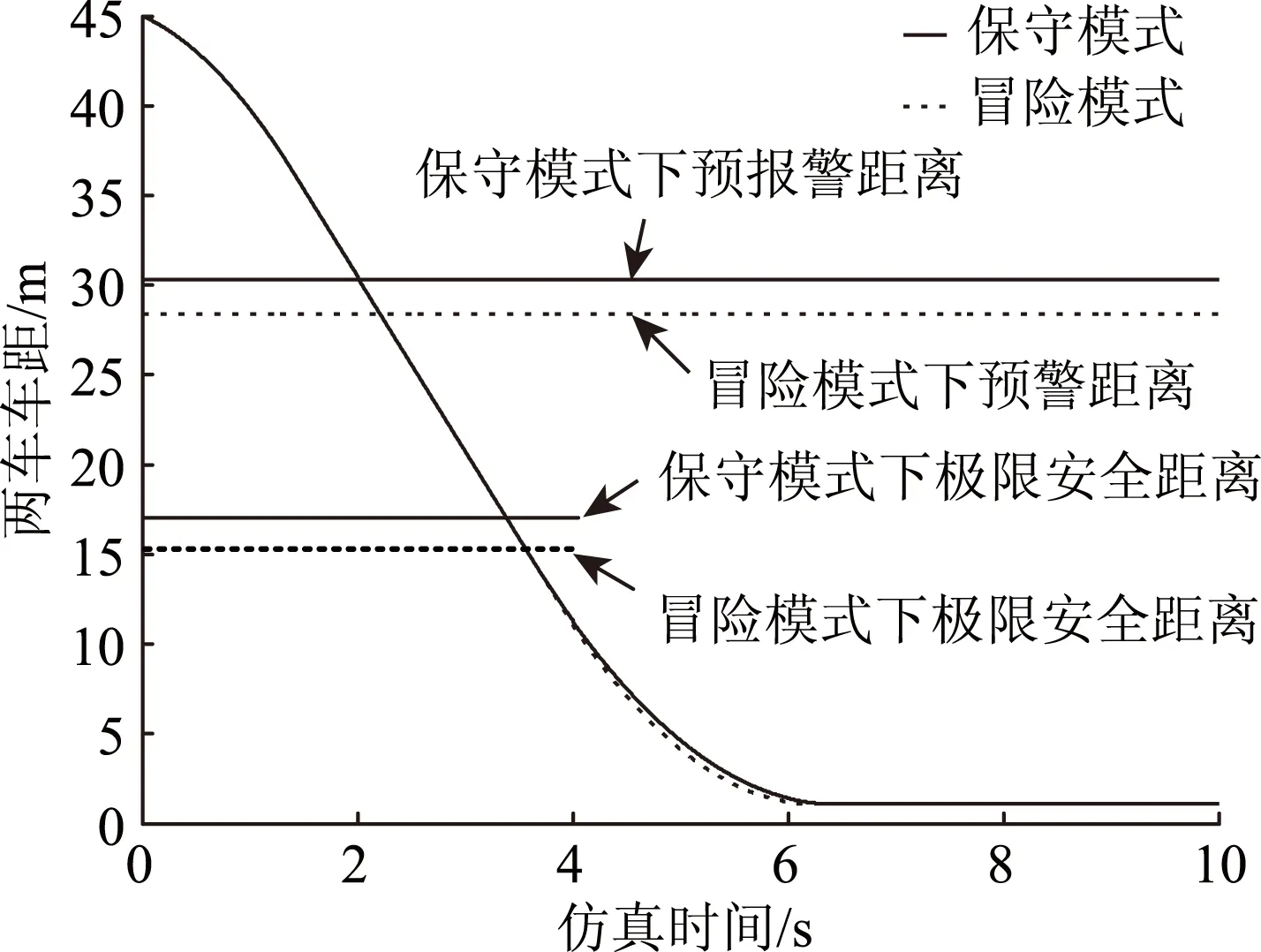
图10 前车紧急制动下安全距离模型仿真曲线Fig.10 Simulation curves of safety distance model when front vehicle emergency braking
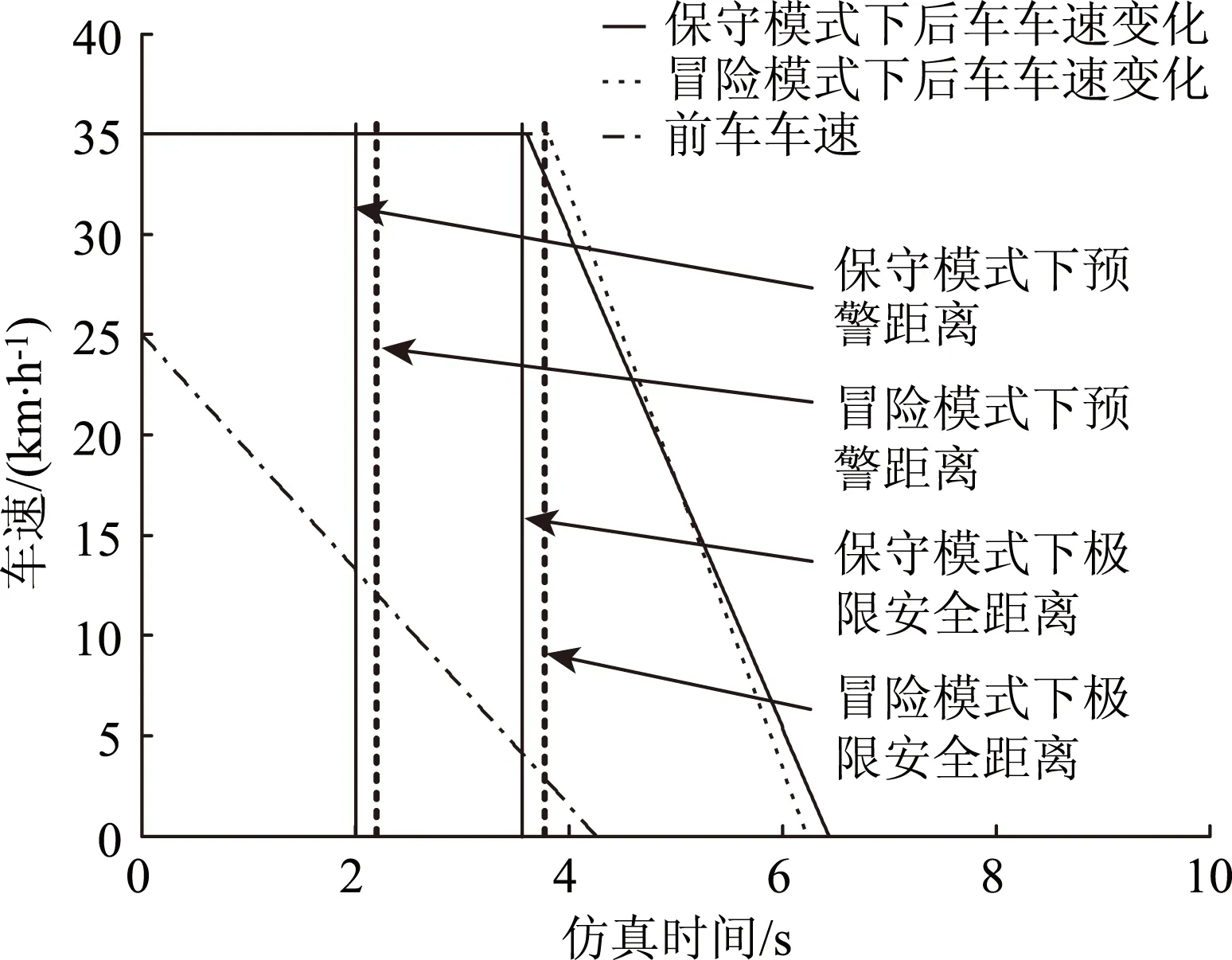
图11 前车紧急制动下两车车速变化曲线Fig.11 Speed curves of 2 vehicles when front vehicle emergency braking
5结论
从影响车车协同下车辆纵向避撞系统准确性和有效性的关键因素出发。通过建立的车辆运动学模型和行驶状态估计方程,采用扩展卡尔曼滤波方法实现了车辆行驶状态参数的准确预估,通过仿真分析验证了车辆行驶状态预估的准确性。根据前车3种不同的运动状态,建立了考虑驾驶员驾驶特性以及路面附着特性的车车协同车辆纵向避撞系统的安全距离模型,通过仿真分析验证了纵向避撞系统安全距离模型可以实现纵向有效避撞。
参考文献:
References:
[1]王庞伟,余贵珍,王云鹏,等.基于滑模控制的车车协同主动避撞算法[J].北京航空航天大学学报,2014,40(2):268-273.
WANGPang-wei,YUGui-zhen,WANGYun-peng,etal.CooperativeActiveCollisionAvoidanceAlgorithmBasedonSlidingModeControl[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2014,40(2):268-273.
[2]裴晓飞,刘昭度,马国成,等.汽车主动避撞系统的安全距离模型和目标检测算法[J].汽车安全与节能学报,2012,3(1):26-33.
PEIXiao-fei,LIUZhao-du,MAGuo-cheng,etal.SafeDistanceModelandObstacleDetectionAlgorithmsforaCollisionWarningandCollisionAvoidanceSystem[J].JournalofAutomotiveSafetyandEnergy, 2012,3(1):26-33.[3]周兵,刘冬.智能车辆主动避撞与稳定性联合控制仿真[J].公路交通科技,2011,28(3):153-158.
ZHOUBing,LIUDong.SimulationofActiveCollisionAvoidanceandStabilityControlforIntelligentVehicle[J].JournalofHighwayandTransportationResearchandDevelopment, 2011,28(3):153-158.
[4]SATOY,SHIMONAKAY,MARUOKAT,etal.VehicularCollisionAvoidanceSupportSystemv2 (VCASSv2)byGPS+INSHybridVehicularPositioningMethod[C]// 2007TelecommunicationNetworksandApplicationsConference.Christchurch:IEEE, 2007: 29-34.
[5]HUANGJ,TANHS.VehicleFutureTrajectoryPredictionwithaDGPS/INS-basedPositioningSystem[C]// 2006AmericanControlConferenc.Minneapolis,MN:IEEE, 2006: 5831-5836.
[6]TANHS,HUANGJ.DGPS-basedVehicle-to-VehicleCooperativeCollisionWarning:EngineeringFeasibilityViewpoints[J].IEEETransactionsonIntelligentTransportationSystems, 2006,7(4):415-428.
[7]许伦辉,罗强,吴建伟,等.基于最小安全距离的车辆跟驰模型研究[J].公路交通科技,2010,27(10):95-100,106.
XULun-hui,LUOQiang,WUJian-wei,etal.StudyofCar-followingModelBasedonMinimumSafetyDistance[J].JournalofHighwayandTransportationResearchandDevelopment, 2010,27(10):95-100,106.
[8]孙斌.基于汽车追尾事故形态分析的避撞算法研究[J].公路交通科技,2013,30(8):140-146.
SUNBin.ACollisionAvoidanceAlgorithmBasedonRear-endCollisionAccidentMorphologicalAnalysis[J].JournalofHighwayandTransportationResearchandDevelopment, 2013,30(8):140-146.
[9]郭洪艳,陈虹,赵海艳,等.汽车行驶状态参数估计研究进展与展望[J].控制理论与应用,2013,30(6):661-672.
GUOHong-yan,CHENHong,ZHAOHai-yan,etal.StateandParameterEstimationforRunningVehicle:RecentDevelopmentsandPerspective[J].ControlTheory&Applications, 2013,30(6):661-672.
[10]RENXiao-dong,FENGZu-ren,CHANGHong,etal.KinematicsModelingandAnalysisforThreeWheelOmnidirectionalMobileRobot[C]//Proceedingsofthe7thWorldCongressonIntelligentControlandAutomation.Chongqing:IEEE, 2008: 2608-2613.
[11]俄文娟.无信号交叉口车车冲突检测与消解算法研究[D].长春:吉林大学,2012.
ERWen-juan.ResearchonVehicleConflictDetectionandResolutionAlgorithmatUnsignalizedIntersection[D].Changchun:JilinUniversity, 2012.
[12]MORETTEN,NOVALESC,PIERREV.InverseVersusDirectKinematicsModelBasedonFlatnessandEscapeLanestoControlCyCabMobileRobot[C]//Proceedingsof2008IEEEInternationalConferenceonRoboticsandAutomation.Pasadena,CA:IEEE, 2008: 2240-2245.
[13]任孝平.汽车状态软测量和车载组合导航系统故障检测技术研究[D].长沙:中南大学,2012.
RENXiao-ping.ResearchonSoft-measurementofVehicleStatusandIntegratedNavigationSystemFaultDetectionMethod[D].Changsha:CentralSouthUniversity, 2012.
收稿日期:2015-08-18
基金项目:国家自然科学基金项目(51507013);中央高校基本科研业务费专项基金项目(2014G1321040,310822151025,310822153201);国家级大学生创新创业训练计划项目(201510710036);陕西省自然科学基础研究计划项目(2014JQ7269)
作者简介:潘勇(1979-),男,安徽桐城人,高级工程师,博士研究生.(54820517@qq.com)
doi:10.3969/j.issn.1002-0268.2016.07.022
中图分类号:U491.255
文献标识码:A
文章编号:1002-0268(2016)07-0137-07
Collaborative Vehicles Longitudinal Safety Distance Model Based on Driving State EstimationPAN Yong1,2, TANG Zi-qiang3, GONG Xian-wu4, TANG Chao4, WANG Wei-lin4
(1.SchoolofInformationEngineering,Chang’anUniversity,Xi’anShaanxi710064,China;
2.KeyLaboratoryofIntelligentTransportTechnologies,MinistryofTransport,Beijing100088,China;
3.SchoolofAutomobile,Chang’anUniversity,Xi’anShaanxi710064,China;
4.SchoolofElectronicandControlEngineering,Chang’anUniversity,Xi’anShaanxi710064,China)
Abstract:In order to improve the performance of vehicle longitudinal collision avoidance system under collaborative vehicles condition, the collaborative vehicles longitudinal safety distance model based on vehicle driving state estimation is proposed. First, through the establishment of the automobile kinematics model which considers the vehicle front and rear axles’ centre positions and state equation of vehicle driving state parameter estimation, the accurate estimation of vehicle driving state is realized using the extended Kalman filtering method. Then, based on the accurate estimation of vehicle driving state parameters, according to the front vehicle motion state, the vehicle longitudinal safety distance models based on collaborative vehicles under the conditions of static front vehicle, front vehicle driving in constant speed and deceleration braking are built. The simulation platform for vehicle state estimation and longitudinal collision avoidance system safety distance model are built based on Matlab/Simulink. The Simulation result verified the accuracy of vehicle driving state estimation and the effectiveness of longitudinal collision avoidance safety distance model.
Key words:automobile engineering; longitudinal collision avoidance; state estimation; safety distance model; extended Kalman filtering; cooperative vehicles