基于深度学习的放置方式和位置无关运动识别
2016-08-01沈延斌郭浩东陈根才
沈延斌, 陈 岭, 郭浩东, 陈根才
(浙江大学 计算机科学与技术学院,浙江 杭州 310027)
基于深度学习的放置方式和位置无关运动识别
沈延斌, 陈岭, 郭浩东, 陈根才
(浙江大学 计算机科学与技术学院,浙江 杭州 310027)
摘要:针对传统基于加速度传感器的运动识别方法依赖于传感设备的放置方式和位置的问题,提出一种基于深度学习的运动识别方法,且与放置方式和位置无关.使用栈式自动编码器构建深度网络,结合逐层无监督学习和全局有监督微调的方式,快速、有效地学习出原始数据的深层特征.设计不同放置方式和不同设备放置位置的学习策略,并利用所学特征对不同设备放置方式和位置下的运动进行识别.实验结果表明:基于深度学习的方法可以从原始数据中提取出与放置方式和位置无关的深度特征,相比传统方法,能够有效提高在非固定加速度传感设备放置方式和位置下的运动识别准确率.
关键词:运动识别;传感设备位置;加速度传感设备;深度学习;普适计算
随着移动通信技术的提高以及智能设备的快速更新,普适计算不断发展,越来越多的智能应用出现在各个领域并服务于大众,如饮食监控[1]、儿童监护[2]、技能评估[3]等,这些应用极大方便了人们的生活.在普适环境中开发这些应用的核心问题便是识别人们的运动[4],以提供个性化的服务.
运动识别可以通过固定在用户身上的加速度传感设备获得的数据进行[5].早期由于加速度传感设备体型比较庞大,对用户的运动束缚较强,因此只能在实验室环境下进行运动识别[6].近年来,随着便携式智能设备的发展,智能手机能够集成传感器设备(如:加速度传感器),并在日常生活被用户随身携带,因此,基于智能手机的运动识别越来越受到重视[7-8].
在传统基于加速度传感设备的运动识别中,提取的特征主要是基于领域知识的时域和频域特征,表征能力有限,用这些特征进行运动识别[7,9]需要将设备以特定的方式固定在特定的位置.若在运动过程中设备偏离特定位置或改变放置方式,都会对识别准确率产生影响.Olgun等[10]研究了在单个加速度传感器偏离位置的情况,结果表明识别准确率下降超过20 %.在日常生活中设备的放置方式和位置经常会发生变化,在使用智能手机时更加明显,用户可能将手机放在身上不同位置(如:上衣袋、裤口袋等),在用户运动过程中手机也会发生位置和方向的变化.对此,Bayati等[11-12]通过EM算法在线无监督估计加速度特征分布的偏移.侯仓健等[13]使用降维和提取模式特征模体的方法解决放置方式和位置无关的问题.Lester等[14]利用不同位置的传感器数据训练分类器以获得位移不变特征.然而,这些方法一方面算法复杂,另一方面人工设计特征比较困难.
深度学习作为一种能自动从原始数据中学习特征的新方法被广泛研究和应用,并在计算机视觉、自然语言处理和文本处理等领域取得成功.近年来,深度学习也逐渐应用于活动识别领域.Plötz等[15]使用深信度网络从加速度传感器数据中学习特征,并取得了比传统特征更好的活动识别能力.Vollmer等[16]在文献[15]的基础上使用一种叫作平移不变稀疏编码的深度学习方法提取到了拥有更好性能的特征.Zeng等[17]使用卷积神经网络从原始数据中提取特征,并在3个数据集上与传统特征进行比较,并对卷积神经网络的参数进行实验.然而,目前仍然缺少对加速度传感设备放置方式和位置无关化的研究.
针对上述问题,本文利用深度学习的方法解决运动识别中放置方式和位置的影响问题.1)通过自动学习深度特征的方法解决非固定加速度传感设备放置方式和位置下的运动识别问题.2)通过实验验证和对比,表明所提方法能够有效提高传感设备在不同放置方式和位置下的活动识别准确率.
1方法设计

图1 活动识别的总流程框架Fig.1 System architecture of activity recognition
活动识别的总流程框架如图1所示.首先对采集得到的原始加速度数据进行预处理,以消除数据噪声以方便后续处理;然后通过深度特征学习方法得到不同放置方式和不同放置位置下的深度特征,以实现放置方式和位置无关化的特征提取;最后进行活动的最终分类.
1.1数据预处理
由于采集得到的原始加速度数据经常包含各种各样的噪声,为了数据的后续处理,需要对原始加速度数据进行预处理.首先对加速度数据进行有效值检测;然后对整段加速度数据按照一定的时间间隔生成加速度帧,组成加速度帧序列,并检查每一帧中数据是否有缺失,对于缺失率小于5%的帧进行相邻数据均值补值;最后对加速度帧序列矩阵按列进行均值化和归一化处理.
1.2深度特征学习
通过栈式自动编码器神经网络从加速度帧序列中逐层无监督学习特征的过程如图2所示.

图2 栈式自编码神经网络从加速度帧序列中逐层学习特征的过程Fig.2 Layer-wise feature learning process of stacked auto-encoder neural network fromacceleration
1)学习第一层特征. 构建含1个输入层、1个隐藏层和1个输出层的标准3层神经网络结构,如图2(a)所示.该神经网络进行前向传播的过程如下:以n维加速度帧向量X作为输入,则中间隐藏层的输出计算公式为

(1)
式中:Wji(1)表示第一层隐藏层中与第j个神经元连接的第i个输入的权重,bj(1)表示第一层输入层中连接到第一层隐藏层中第j个神经元的截距项,f表示Sigmoid激活函数,其公式为

(2)
该函数的值域为[0,1],若某神经元输出值为0则表示其被抑制,输出值为1则表示其被激活.以m维中间隐藏层的输出hj(1)作为输出层的输入,则输出层的输出计算公式为

(3)
式中:bi(2)表示第一层隐藏层中连接到第一层输出层中第i个输出的截距项.
若输出层的输出与输入层相近,则说明该神经网络的隐藏层输出能很好地还原输入数据,也就是说隐藏层输出是输入数据的另一种表征,可以将其作为输入数据的特征.因此,采用神经网络中经典的反向传播算法对参数W和b不断进行迭代使输出逼近输入,从而学习得到加速度帧序列的第一层特征.
2)学习第二层特征.在学习得到加速度帧序列的第一层特征之后,与1)中步骤类似构建一个标准的3层神经网络结构,如图2(b)所示;其进行前向传播的过程与1)中相同,所不同的是其输入层是从第一个神经网络中学习得到的特征,即第一个神经网络中隐藏层的输出.同样使用反向传播算法使该神经网络的输出逼近输入,从而学习得到加速度帧序列的第二层特征.
在学习得到第二层特征后,若想继续学习特征则可以重复上述步骤,不断学习原始输入数据的深层特征.若所得到的特征已经具有足够的表征能力,则可用该特征进行分类器训练以识别活动.
上述过程属于无监督学习,在特征学习时无需数据标签,在此基础上还可以对学习得到的特征进行有监督的微调学习,从而进一步提高学习得到的特征表征能力.通过栈式自编码神经网络对学习得到的特征进行有监督微调,如图3所示.其中,p为后验概率.
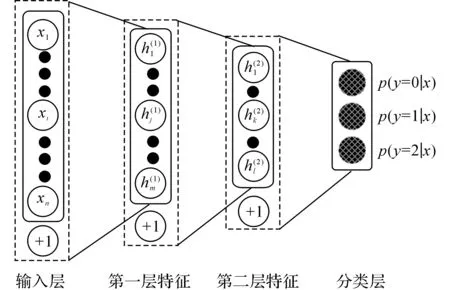
图3 栈式自编码神经网络对学习得到的特征进行有监督微调的过程Fig.3 Supervised fine-tune process of stacked auto-encoder neural network for learnt features
1)构建神经网络.为了进行有监督微调,构建一个和上述逐层学习过程中总体规模一样的神经网络,包含1个输入层、2个隐藏层和1个输出层的4层神经网络.该网络的输入层维度与学习第一层特征时的输入层维度一样,即为加速度帧向量的长度加上一个截距项;该网络的2个隐藏层维度分别与学习第一层特征时的隐藏层维度和学习第二层特征时的隐藏层维度一样;该网络的输出层维度与分类器层维度一样,即数据标签的种类个数.
2)初始化神经网络参数.构建好神经网络之后,使用上述逐层学习时学习得到的参数W和b初始化该神经网络的参数W和b,每一层的参数都一一对应.即用上述学习第一层特征时的参数W和b初始化该网络第一个隐藏层的参数W和b,用上述学习第二层特征时的参数W和b初始化该网络第二个隐藏层的参数W和b.
3)有监督微调.对于经过初始化后的4层神经网络,以n维加速度帧向量X作为输入进行逐层前向传播直至分类层,通过比较分类层输出与数据标签的值进行反向传播,从而逼近分类层输出和数据标签.
通过上述逐层无监督学习和最后的有监督微调的方式,可以有效学习原始数据的深层特征,解决传统多层神经网络训练慢、因网络层次深所造成的梯度扩散而无法收敛到局部最优解的问题.
1.3不同放置方式学习方法
为了分析从加速度帧序列中学习到的深度特征是否能够表征不同放置方式中的共性,将分别对文献[18]中的4种不同放置位置下的4种不同放置方式进行深度特征学习.其中,4种放置方式包括正向朝上(O1)、正向朝下(O2)、反向朝上(O3)和反向朝下(O4),4种放置位置包括胸口、上臂、裤前袋和裤后袋,如图4所示.这些放置方式和位置基本涵盖了智能手机在日常活动中所有放置的方式和位置.

图4 设备的放置方式和位置示意图Fig.4 Illustration of device orientations and placements
在胸口放置位置下的4种放置方式的学习方法如图5所示.胸口放置位置下数据的特征学习过程包括智能手机正向朝上、正向朝下、反向朝上和反向朝下4种不同放置方式下的参数学习过程.特征生成过程:对于4种不同放置方式中的每一种放置方式,都用其学习到的深度神经网络参数生成所有4种不同放置方式下的深度特征,共计16种深度特征,其伪代码如下所示.
Input: 某种放置位置下4种放置方式的加速度时序数据帧序列ASerOX,其中OX分别为O1、O2、O3、O4,ASerOX的帧数为n
Output:从该放置位置的4种放置方式下分别学习到的4种深度特征序列ADFSerOX-OX
batchsize = 每次学习使用的帧数;
numbatches =n/ batchsize;
currIndex = 0;
W、b= 需要学习的参数;
while currIndex < numbatches do
ASersubOX= ASerOX从currIndex*batchsize+1起batchsize长度的子序列;
用ASersubOX更新W和b;
currIndex += 1;
end while
currIndex = 0;
while currIndex < n do
ASersubOX= ASerOX第currIndex+1帧;
ADFFraOX-OX= 将ASersubOX通过W和b计算得到的第currIndex+1加速度深度特征帧;
将ADFFraOX-OX加入到ADFSerOX-OX中;
currIndex += 1;
end while
return ADFSerOX-OX;
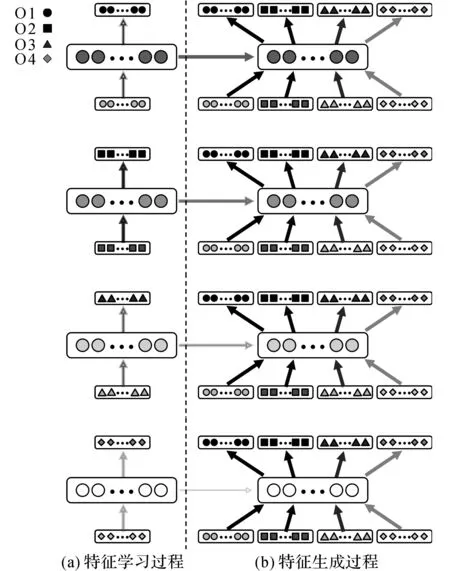
图5 在胸口放置位置下的4种不同放置方式的特征学习方法Fig.5 Feature learning method for four different device orientations under chest placement
在学习得到上述16种深度特征后,便可以用这些深度特征训练分类模型进行分类准确率的比较,从而分析是否可以从加速度帧序列中学习得到与放置方式无关的深度特征.对于上臂、裤前袋、裤后袋3种不同放置位置也采用上述学习方法进行验证.
1.4不同放置位置学习方法
前文已经对4种不同放置位置都进行了4种不同放置方式的比较,在此基础上将分析从加速度帧序列中学习到的深度特征是否能够表征不同放置位置中的共性. 分别对4种不同放置位置进行深度特征学习,不考虑4种不同放置方式,即将4种不同放置方式混合在一起.4种不同放置位置下的学习方法如图6所示.
图6虚线左半部分表示特征学习过程,从上到下分别在胸口、上臂、裤前袋和裤后袋4种不同放置位置下学习深度神经网络的参数.其中,每一种放置位置下的4种不同放置方式已混合在一起;图6虚线右半部分表示特征生成过程,对于4种不同放置位置中的每一种放置位置,都用其学习到的深度神经网络参数生成所有4种不同放置位置下的深度特征,共计16种深度特征,其伪代码如下表所示.
Input: 4种放置位置下的加速度时序数据帧序列ASerPX,其中PX分别为P1、P2、P3、P4,ASerPX的帧数为n
Output:从4种放置位置下分别学习到的4种深度特征序列ADFSerPX-PX
batchsize = 每次学习使用的帧数;
numbatches =n/ batchsize;
currIndex= 0;
W、b= 需要学习的参数;
while currIndex < numbatches do
ASersubPX= ASerPX从currIndex*batchsize+1起batchsize长度的子序列;
用ASersubPX更新W和b;
currIndex += 1;
end while
currIndex = 0;
while currIndex < n do
ASersubPX= ASerPX第currIndex+1帧;
ADFFraPX-PX= 将ASersubPX通过W和b计算得到的第currIndex+1加速度深度特征帧;
将ADFFraPX-PX加入到ADFSerPX-PX中;
currIndex += 1;
end while
return ADFSerPX-PX;

图6 4种不同放置位置下的特征学习方法Fig.6 Feature learning method for four different device placements
在学习得到上述16种深度特征后,可以用这些深度特征训练分类模型进行分类准确率的比较,从而分析是否可以从加速度帧序列中学习得到与放置位置无关的深度特征.
2实验
本文使用安装Google公司Android系统的智能手机Nexus 4采集加速度数据.参与实验者包括10名健康的大学在校生(8名男性和2名女性,年龄范围为20~25岁),每人分别将智能手机按照文献[18]中的4种不同放置方式放在身体胸口、上臂、裤子前口袋、裤子后口袋这4个不同位置.实验人员进行以下7种运动:坐着、站着、走路、跑步、上楼、下楼和骑车.为了更接近日常的运动行为,实验人员在坐着时可以适当地进行活动,如:调整坐姿;走路等运动可以按照不同的速度进行.每种运动的时长约为3 min,每个实验人员大约录制了3 h的数据,共有约31 h的数据.
人体日常物理活动的频率通常都很低,一般小于20 Hz,因此将数据的采集频率设为20 Hz,该频率能够记录下人体运动的完整信息.根据文献[7],本文将1帧加速度帧的时间设为5 s,即100个采样点,2帧加速度帧之间的时间重叠为2.5 s.该深度学习算法利用自动编码器深度神经网络[19],并在DeepLearnToolbox[20]工具的基础上实现.
2.1参数设置
通过深度学习从原始数据中学习深度特征主要是训练参数W和b,而对这2个参数影响最大的就是深度神经网络的深度(网络的层数)和每一层网络的维数.当深度神经网络的层数较小时,只能学习到有限表征能力的浅层特征,尤其是当隐藏层的个数只有1层时,则退化为传统的神经网络;随着网络层数的增加,可以逐步学习到更深一层的特征,具备对原始数据更好的表征能力.但是,网络深度的增加伴随着学习代价的增加,不仅耗时而且参数数量巨大,需要对深度神经网络层数的选择进行权衡考虑.根据文献[15],当学习到第三层特征时已经有很好的效果,因此本文将采用含3个隐藏层结构的深度神经网络,加上输入层和输出层共5层.对于每一层网络的维数,之前的研究都没有明确的阐述,本文通过下述实验确定.
建立一个5层的深度神经网络结构,该网络的第一层即输入层.1帧加速度帧具有100个采样点,每个采样点具有x、y、z三个方向的加速度值,因此第一层的维数是300.网络的第五层即输出层,该层的维数需要与分类的类别个数一样,本实验中一共要识别7种运动,因此第五层的维数是7.网络的第四层即第三层隐藏层,用于输出学习到的第三层特征,也是该网络最后学习到的特征.为了比较学习到的深度特征与传统特征的性能,选择与传统特征维数一样的维数,在本实验中对加速度帧提取的传统特征包括3轴加速度的均值、均方差、能量、熵和3轴之间的相关系数共15个特征,因此第四层的维数设为15.对于该网络第二层和第三层的维数通过实验确定,通常将两层的维数设置为相同.即使如此,需要遍历的网络维数组合依然太多,因此先确定网络维数的大致范围:将第二、三层网络的维数d依次设为100~1 000,增量为100.使用所有不同位置不同方向的数据进行特征学习,同样使用所有不同位置不同方向的数据进行测试,使用十折交叉验证的实验结果如图7所示,当网络维数在200附近时识别准确率r最高.为了确定网络维数的具体范围,将第二、三层网络的维数d再依次设为10~300,增量为10,同样使用所有数据进行特征学习,使用所有数据进行测试,十折交叉验证的实验结果如图8所示,可知当网络维数为180时识别准确率r最高.因此,在接下来的实验中,将加速度帧学习特征的深度神经网络层数设置为5,每一层的维数依次设置为300、180、180、15、7.

图7 随网络第二、三层维数大范围变化的所有数据的识别准确率Fig.7 Recognition accuracy of all data that varies in large range along with dimension of second and third layer networks

图8 随网络第二、三层维数小范围变化的所有数据的识别准确率Fig.8 Recognition accuracy of all data that varies in small range along with dimension of second and third layer networks
2.2不同放置方式的结果
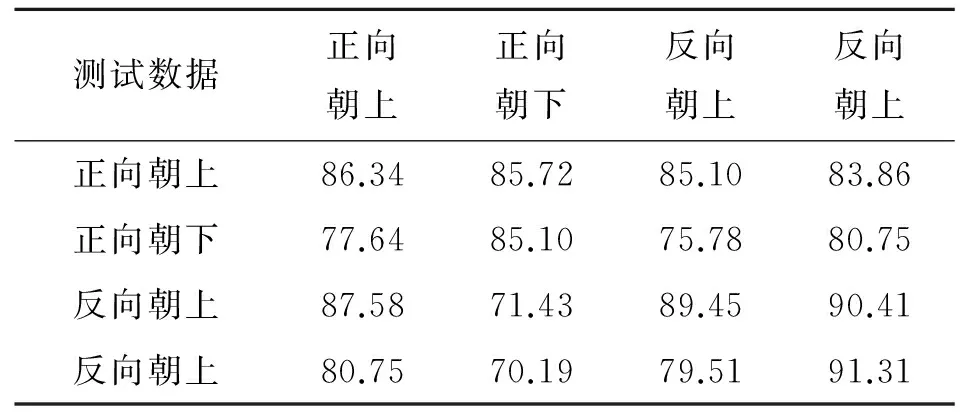
为了验证从加速度数据中学习到的深度特征是否能够表征不同放置方式的共性,采用如图5所示的不同放置方式的学习方法,实验结果如表1~4所示,表中行代表学习特征时的放置方式,列代表测试时的放置方式,表中第i行第j列表示采用第i种放置方式进行特征学习,第j种放置方式进行测试.

表1 胸口数据的识别准确率

表2 上臂数据的识别准确率
表3裤前袋数据的识别准确率
Tab.3Recognition accuracy of data from front trouser-pocket
%
表4裤后袋数据的识别准确率
Tab.4Recognition accuracy of data from behind trouser-pocket%

测试数据正向朝上正向朝下反向朝上反向朝上正向朝上84.3785.2784.8671.47正向朝下85.1090.0780.1371.43反向朝上91.5577.4392.5588.73反向朝上86.3478.5889.1987.42
从实验结果可以看出,使用不同放置方式的学习方法,其识别准确率都在66 %以上,平均识别准确率达到81.71 %,说明可以通过提出的基于深度学习的加速度传感器深度特征学习方法从加速度数据中学习得到与放置方式无关的特征.
2.3不同放置位置的结果
为了验证从加速度数据中学习到的深度特征是否能够表征不同放置位置中的共性,采用如图6所示的不同放置位置的学习方法,其实验结果如表5所示,表中行代表学习特征时的放置位置,列代表测试时的放置位置,深度表示深度特征,传统表示传统特征.
从实验结果可以看出,使用不同放置位置的学习方法,其识别准确率都在55 %以上,平均识别准确率达到71.32 %;而使用传统特征的平均准确率仅为32.11 %,仅当在同一位置进行训练和测试时其准确率才较高.这是因为传统特征一般是基于统计计算得到的,通常使用线性函数进行计算,而加速度数据在不同放置位置下的数据特性差异较大,通过线性变换后的特征之间差异也较大,因此,当训练和测试不在同一位置时,准确率明显下降.而深度特征是通过复杂的非线性函数学习得到,能够逐步学习数据最本质的特性,说明提出的基于深度学习的加速度传感器深度特征学习方法可以从加速度数据中学习得到与放置位置无关的特征.

表5 不同放置位置数据的识别准确率
3结语
基于深度学习理论,提出了一种与放置方式和位置无关的运动识别方法,通过不同放置方式和不同放置位置下的学习策略,对所学特征进行验证.实验结果表明,所提方法能够从加速度数据中学习得到与放置方式和位置无关的特征,并且相比传统方法能更有效提高在非固定加速度传感设备放置方式和位置下的运动识别准确率.未来研究工作将会重点关注深度特征与更高级的特征(如:频域特征和模式特征等)对比.
参考文献(References):
[2] ALBINALI F, GOODWIN M S, INTILLE S S. Recognizing stereotypical motor movements in the laboratory and classroom: a case study with children on the autism spectrum [C] ∥ Proceedings of International Conference on Ubiquitous Computing. Orlando: ACM, 2009: 71-80.
[3] LADHA C, HAMMERLA N Y, OLIVIER P, et al. ClimbAX: skill assessment for climbing enthusiasts [C] ∥ Proceedings of International Joint Conference on Pervasive and Ubiquitous Computing. Zurich: ACM, 2013: 235-244.
[4] ATALLAH L, YANG G Z. The use of pervasive sensing for behaviour profiling: a survey [J]. Pervasive and Mobile Computing, 2009, 5(5): 447-464.
[5] DEVAUL R W, DUNN S. Real-time motion classification for wearable computing applications [R]. Cambridge: MIT Media Laboratory, 2001.
[6] LEE S W, MASE K. Activity and location recognition using wearable sensors [J]. Pervasive Computing, 2002, 1(3): 24-32.
[7] BAO L, INTILLE S S. Activity recognition from user-annotated acceleration data [C] ∥ Proceedings of International Conference on Pervasive Computing. Vienna: Springer, 2004: 1-17.
[8] KWAPISZ J R, WEISS G M, MOORE S A. Activity recognition using cell phone accelerometers [J]. ACM SIGKDD Explorations Newsletter, 2011, 12(2): 74-82.
[9] RAVI N, DANDEKAR N, MYSORE P, et al. Activity recognition from accelerometer data [C] ∥ Proceedings of Conference on Innovative Applications of Artificial Intelligence. Pittsburgh: AAAI, 2005: 1541-1546.
[10] OLGUIN D O, PENTLAND A S. Human activity recognition: Accuracy across common locations for wearable sensors [C] ∥ Proceedings of International Symposium on Wearable Computers (Student Colloquium). Montreux: IEEE, 2006: 11-13.
[11] BAYATI H, DEL R MILLN J, CHAVARRIAGA R. Unsupervised adaptation to on-body sensor displacement in acceleration-based activity recognition [C] ∥ Proceedings of International Symposium on Wearable Computers. San Francisco: IEEE, 2011: 71-78.
[12] CHAVARRIAGA R, BAYATI H, MILLN J D. Unsupervised adaptation for acceleration-based activity recognition: robustness to sensor displacement androtation [J]. Personal and Ubiquitous Computing, 2013, 17(3): 479-490.
[13] 侯仓健,陈岭,吕明琪,等.基于加速度传感器的放置方式和位置无关运动识别[J].计算机科学,2014, 41(10): 76-79, 94.
HOU Cang-jian, CHEN Ling, LV Ming-qi, et al. Acceleration-based activity recognition independent of device orientation and placement [J]. Computer Science, 2014, 41(10): 76-79, 94.
[14] LESTER J, CHOUDHURY T, BORRIELLO G. A practical approach to recognizing physical activities [C] ∥Proceedings of International Conference on PERVASIVE. Dublin: Springer, 2006: 1-16.
[15] PLÖTZ T, HAMMERLA N Y, OLIVIER P. Feature learning for activity recognition in ubiquitous computing [C] ∥ Proceedings of International Joint Conference on Artificial Intelligence. Barcelona: AAAI, 2011: 1729-1734.
[16] VOLLMER C, GROSS H M, EGGERT J P. Learning Features for Activity Recognition with Shift-Invariant Sparse Coding [C] ∥ Proceedings of International Conference on Artificial Neural Networks. Sofia: Springer, 2013: 367-374.
[17] ZENG M, NGUYEN L T, YU B, et al. Convolutional neural networks for human activity recognition using mobile sensors [C] ∥ Proceedings of Sixth International Conference on Mobile Computing, Applications and Services. Austin: IEEE, 2014: 197-205.
[18] GUO H, CHEN L, CHEN G, LV M. Smartphone-based activity recognition independent of device orientation and placement [J]. International Journal of Communication Systems, 2015.
[19] MARTINEZ H P, BENGIO Y, YANNAKAKIS G N. Learning deep physiological models of affect [J]. Computational Intelligence Magazine, IEEE, 2013, 8(2): 20-33.
[20] PALM R B. Prediction as a candidate for learning deep hierarchical models of data [J]. Technical University of Denmark, Palm, 2012, 25.
收稿日期:2015-12-30.
基金项目:国家自然科学基金资助项目(60703040,61332017);浙江省科技计划资助项目(2011C13042,2015C33002).
作者简介:沈延斌(1989—),男,硕士生,从事普适计算研究.ORCID: 0000-0001-5313-1846. E-mail: tcsyb@zju.edu.cn 通信联系人:陈岭,男,副教授. ORCID: 0000-0003-1934-5992. E-mail: lingchen@cs.zju.edu.cn
DOI:10.3785/j.issn.1008-973X.2016.06.018
中图分类号:TP 391.4
文献标志码:A
文章编号:1008-973X(2016)06-1141-08
Deep learning based activity recognition independent of device orientation and placement
SHEN Yan-bin, CHEN Ling, GUO Hao-dong, CHEN Gen-cai
(CollegeofComputerScienceandTechnology,ZhejiangUniversity,Hangzhou310027,China)
Abstract:An activity recognition method based on deep learning and independent of device orientation and placement was proposed, to address the problem that traditional acceleration activity recognition methods usually depend on the fixed device orientations and placements. Based on a layer-wise unsupervised learning and a global supervised fine-tuning, deep neural networks were constructed by stacked auto-encoder. Then, the deep features of the proposed method were efficiently and effectively extracted from original acceleration data. Finally, a cross orientation and placement evaluation strategy was presented to recognize the activities under different device orientations and placements. Experimental results show that the proposed method can extract discriminative deep features from original data and achieve better performance than other methods under the condition of uncontrolled acceleration device orientation and placement.
Key words:activity recognition; sensor device placement; acceleration sensor device; deep learning; pervasive computing
