港口桥式起重机吊重系统姿态的稳定性控制
2016-07-25张智华李胜永张传涛
张智华,李胜永,徐 勇,张传涛
(南通航运职业技术学院,江苏南通226010)
港口桥式起重机吊重系统姿态的稳定性控制
张智华,李胜永,徐勇,张传涛
(南通航运职业技术学院,江苏南通226010)
摘要:通过建立港口桥式起重机吊重系统的数学简化模型,提出基于位移和角度控制的模糊自适应PID智能控制方法,并在此基础上设计姿态稳定PLC控制系统,通过实验平台验证,该控制方法能够使得吊重系统迅速趋于稳定、响应速度较快,从而提高了起重机的工作效率和安全性。
关键词:桥式起重机;吊重系统;稳定性控制;模糊自整定PID
在港口企业生产中,桥式起重机作为一种重要的物料搬运设备,发挥的作用越来越重要。随着自动控制技术的发展,起重机的安全操作、智能化控制要求越来越高。桥式起重机由于自身结构的原因,在货物吊运过程中吊重难免产生摇摆,这不仅容易引发安全事故,而且降低了物料搬运的工作效率[1]。因此,为提高起重机工作效率、降低安全风险,实现起重机吊重电机系统在运行过程中姿态的稳定控制具有重要意义。
1 起重机吊重系统的数学模型
由于起重机系统比较复杂,小车电机系统为非线性装置,则在运动过程中会产生摩擦力、绳长变化等因素,小车在被控过程中会呈现非线性、时变性状态,加上风力、雨水等不确定环境因素,则整个系统的模型建立较为复杂。因此在考虑简化影响因素的基础上,建立基于拉格朗日方程的二维动力学模型[2]。
1.1 模型的建立
起重机的吊重电机系统简化模型如图1所示。
设小车质量为M,负载质量为m,忽略质量的柔性钢丝绳绳长为l;并设起升钢缆的定滑轮直径为0,即将其看成一个理想的支点;钢缆刚度足够大,并忽略其形变;货物在垂直于水平面的平面内运动,在模型中将吊具和货物看做无体积的质点;只考虑货物在运动中的横向摆动,且摆角需较小;忽略风力、摩擦和空气阻力;忽略整个系统的弹性变形。f1为小车沿x轴方向对小车的驱动力;f2表示钢丝绳的张力。
设小车位置坐标为O1(x,y),吊重m在图1中的坐标点为O2(xm,ym),则有以下关系式:

上式左右方程对时间求导,从而可以得到m 沿x,y轴速度分量为:

整个系统的动能则为:

当在O1点位置时系统处于零势能点,则势能为:V=-mglcosθ(4)
在模型建立过程中,选取整个系统坐标为(x,l,θ),则建立系统的拉格朗日方程为:

式中:由于影响因素主要为三方面,则取i=1,2,3;L为拉格朗日函数,有L=E-V;qi为广义坐标,q1、q2、q3分别代表 x、l、θ;Fqi为广义作用力,Fq1、Fq2、Fq3分别对应 f1、 f2、0。
将式(2)、(3)、(4)带入式(5),得到起重机吊重系统关于x、l、θ的动力学方程:
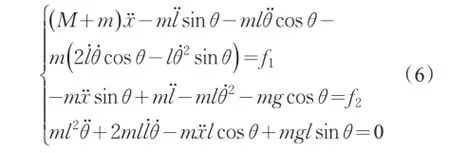
由式(6),则有系统的状态方程为:

1.2 模型的分析与简化
在起重机实际操作过程中,为了稳定吊重系统,则需要去抑制吊重的摆角θ,使得θ尽量小,满足||θ<<1,||θ˙<<1。对上述数学模型进行线性化和简化,则有sinθ≈θ,cosθ≈1。
则将简化结果代入式(6),则有系统简化模型:
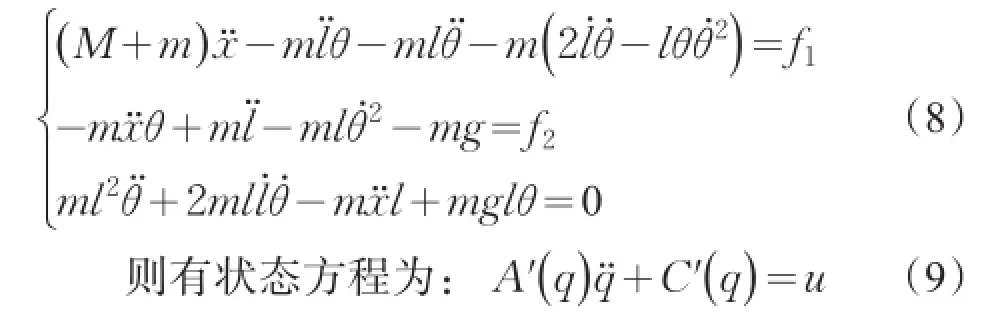
在简化模型的基础上进行变换得到吊重系统的状态方程,对得到的状态方程进行分析,小车位移和吊重摆角为姿态稳定控制的主要要素,同时可知该动力学模型系统是稳定可控和可观测的。
2 起重机吊重电机系统稳定控制器设计
由上述数学模型分析,要对吊重系统进行姿态的稳定控制,需要在模型的基础上引入自适应的智能控制,考虑把PID控制与模糊控制组合起来,构成模糊自整定PID控制器,集合两种控制的优点,以实现系统的最佳控制效果[3]。
2.1 模糊自整定PID控制方案
为了使起重机姿态稳定,考虑设计基于小车位移和吊重摆角的模糊PID控制系统。通过分析小车位移控制系统的输出对摆角影响比较大,其控制相对复杂,对于位置控制在模糊控制基础上加入PID控制,构成模糊自整定PID控制。图2为小车位移的起重机模糊PID控制原理框图。
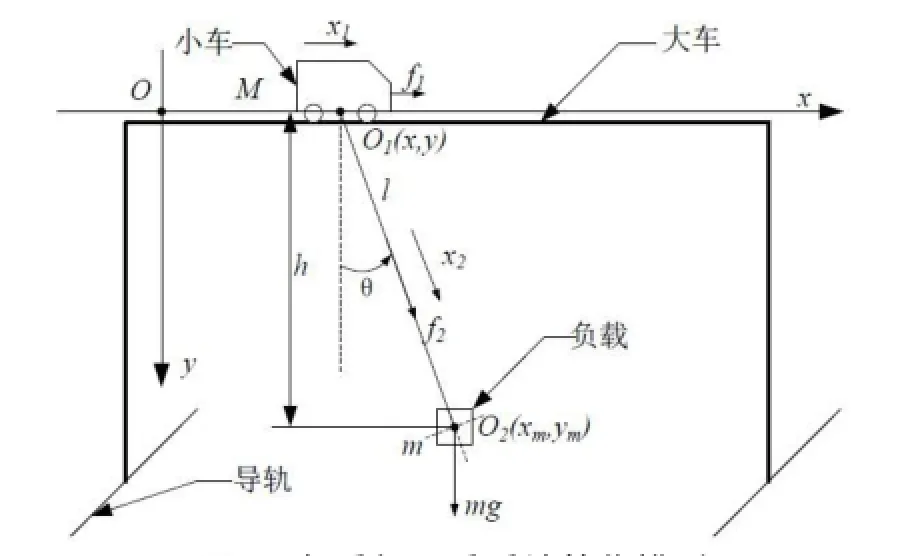
图1 起重机吊重系统简化模型
图2中偏差e和偏差变化率ec为参数模糊控制的输入变量,输出变量为Kp、Ki、Kd,实际输出的是它们的增量ΔKp、ΔKi、ΔKd。参数模糊控制的作用就是根据不同的偏差e和偏差变化率ec,作出对PID参数的调整。系统不断将检测到的e和ec输入到模糊控制器,模糊控制器则按模糊控制规则不断调整输出的PID参数,以满足系统模型的参数变化,使系统动、静态性能得到改善。

图2 起重机模糊PID控制原理框图
2.2 模糊自整定PID稳定控制器设计
根据操作人员的经验和起重机实际运行情况,以起重机的小车为例,取小车位移偏差e的基本论域为[-0.5,0.5]m,位移偏差变化ec的基本论域为[-0.4,0.4]m/s。同样,根据经验获得PID控制的比例系数ΔKp基本论域为[-3,3],积分系数ΔKi基本论域为[-1.5,1.5],微分系数ΔKd基本论域为[-0.9,0.9]。计算得到的量化因子和比例因子如表1。

表1 模糊PID控制器的量化因子和比例因子
表1所列的量化因子和比例因子都是理论值,在实际应用中,为了使控制系统具有较好的动、静态性能,需要根据调试情况对这些参数值进行微调,以获取适当的整定值。
通过模糊控制实时调整PID控制参数,使PID控制系统能够适应起重机吊重系统数学模型非线性的特性。这样既利用了PID控制稳定性好、又利用了模糊控制应变性强的优点。因此,该控制模式比单独使用PID控制或模糊控制的系统更适用于起重机的吊重系统姿态稳定控制。
3 实验平台及仿真分析
3.1 吊重姿态稳定控制实验系统
根据起重机吊重姿态稳定控制的要求,速度要能够平滑调节,从而设计了姿态稳定控制实验系统,该系统主要由西门子PLC、变频器、电机、编码器等组成。起重机大车、小车、起升机构都是独立驱动控制的,由PLC集中控制,通过变频器和PLC、编码器来控制电机的速度,来达到吊重系统的摆角和位移的设定要求[4][5]。实验系统通过PLC编程实现吊重电机系统的模糊自整定PID控制模块,如图3所示。
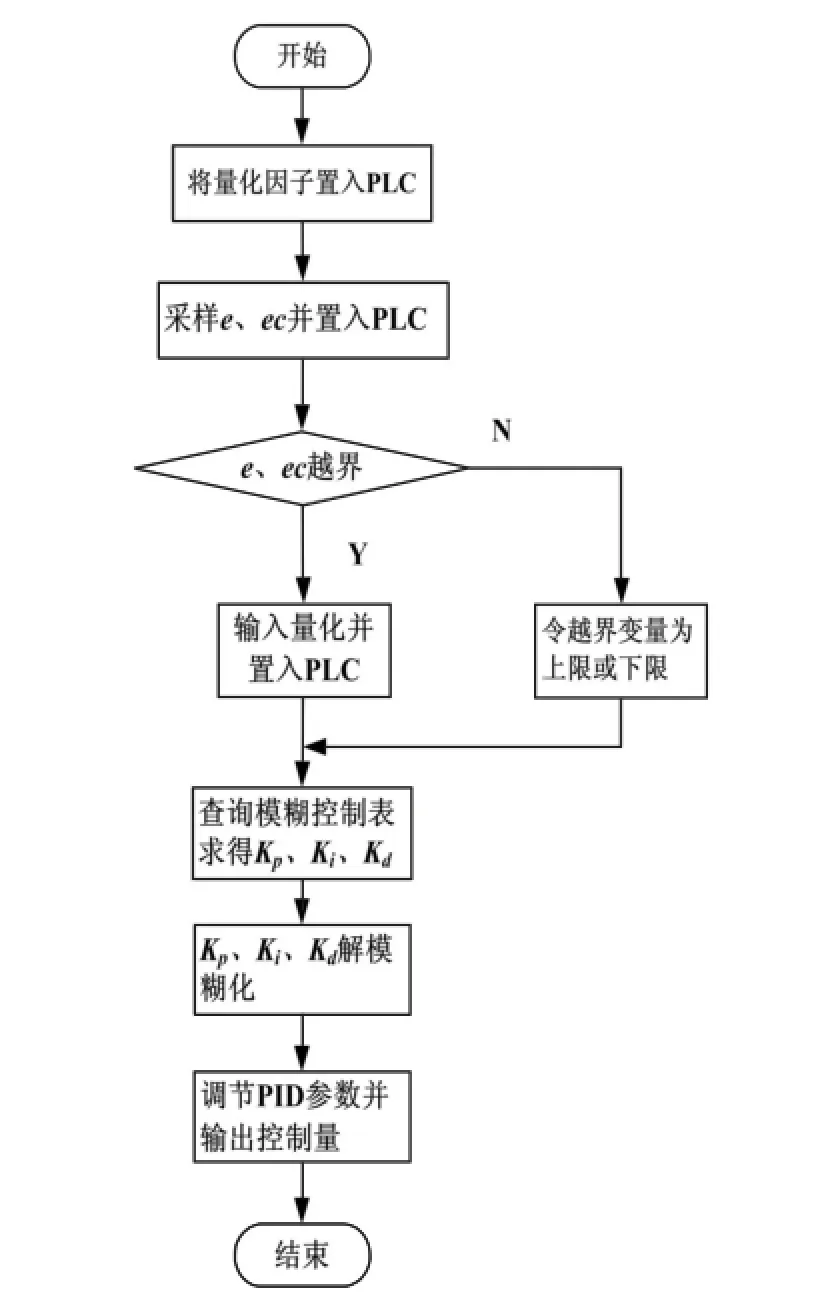
图3 PLC编程模糊PID控制算法实现流程
3.2 实验结果分析
选用一台跨距为10 m的5 t起重机,在姿态稳定控制系统基础上进行试验,鉴于现场条件有限,选取吊重100 kg,摆长为5 m。通过大小车的编码器分别检测起重机大小车的速度,同时通过编码器获得吊重的摆长,通过摆角监测单元获得吊重的摆角。为验证姿态稳定的效果,检测未启用和启用姿态稳定控制两种状态下的小车速度和摆角曲线。
从图4和图5曲线对比来看,摆角曲线的差异非常明显,未启用姿态稳定控制时,吊重反复摇摆,摆幅衰减较慢,要等待较长时间才趋于稳定;而启用姿态稳定控制后吊重摆动的次数减少很多,而且摆幅会迅速减小,吊重系统很快就趋于稳定,可见基于模糊PID的吊重系统达到了姿态稳定控制要求。
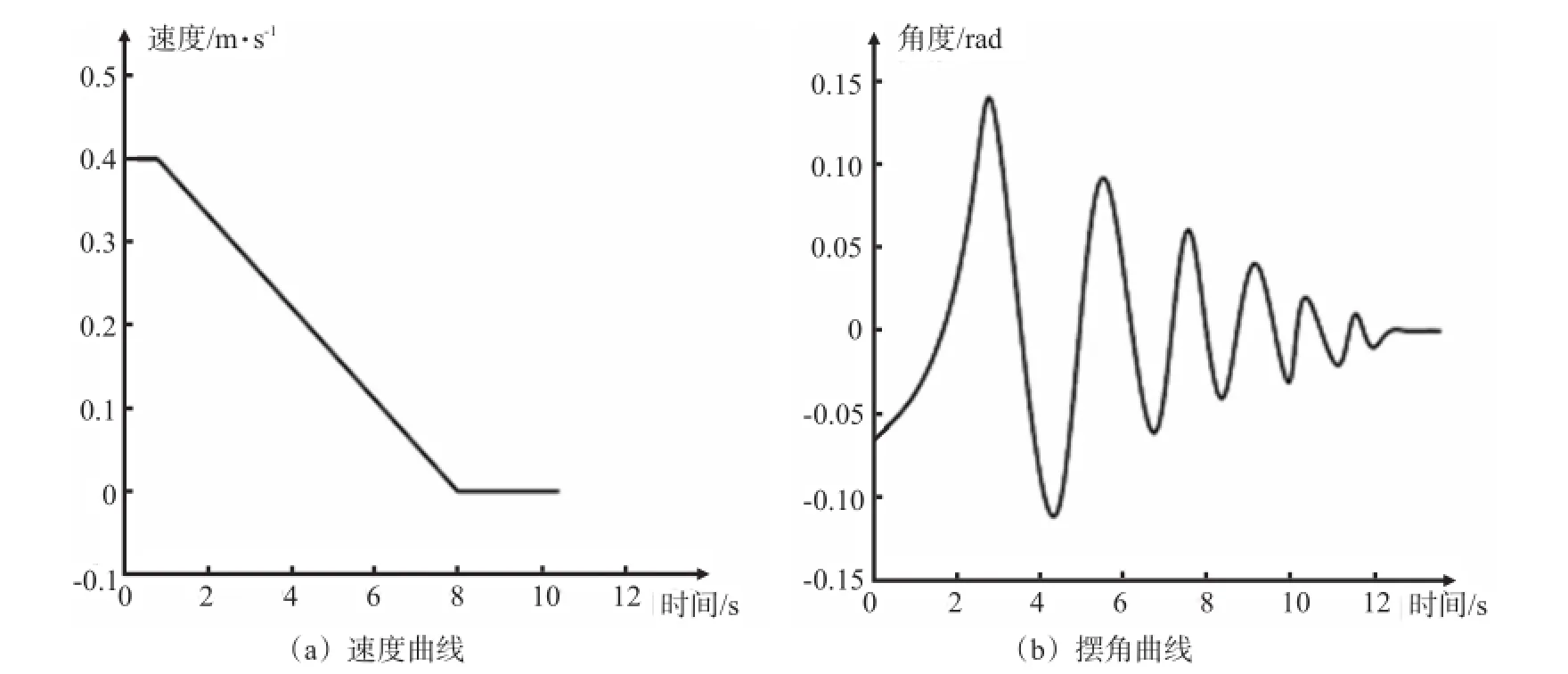
图4 未启用姿态稳定控制的曲线
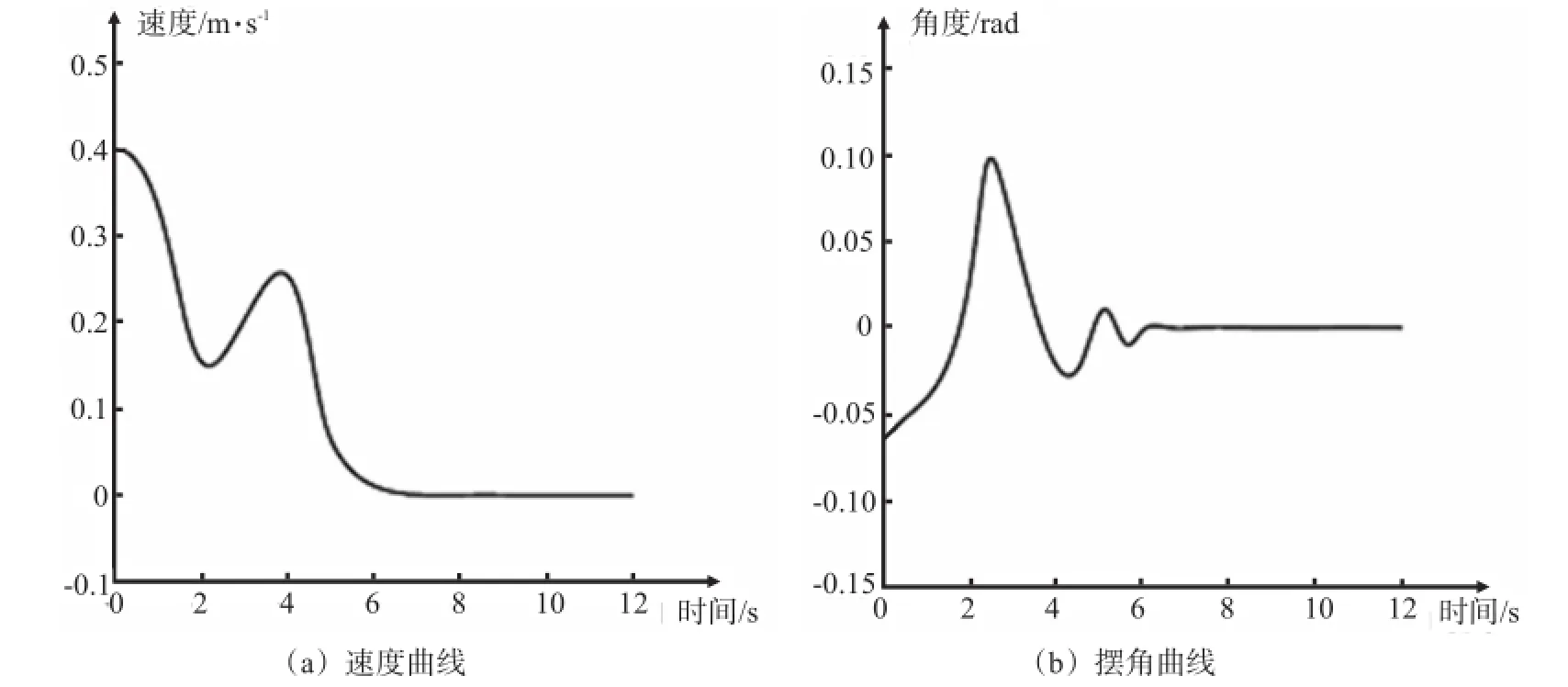
图5 启用姿态稳定控制的曲线
4 结论
本文主要将模糊自整定PID应用到港口起重机姿态稳定控制系统中,通过PLC的软件程序来对吊重电机系统模型参数的数据进行运算处理,实现模糊自整定PID姿态稳定的控制逻辑。通过将设计的姿态稳定控制系统在实际的起重机平台上试验分析,取得比较好的验证效果,从而证明了控制方法的可行性和有效性,对港口起重机电机控制系统的节能有着指导意义。
参考文献:
[1]戴士杰,赵 雷.桥式起重机防晃动控制综述[J].机械设计与制造,2008,(11):234-235.
[2]唐远洋,肖健梅,等.基于MATLAB集装箱起重机防摇系统仿真[J].机电设备,2008,(3):52-55.
[3]王迎春.复杂非线性系统的模糊控制[M].北京:科学出版社,2009.
[4]傅德源.实用起重机电气技术手册[M].北京:机械工业出版社,2011.
[5]廖常初.PLC基础及应用[M].北京:机械工业出版社,2007.
研究方向:港口电气控制技术
中图分类号:TH215
文献标识码:A
文章编号:1671-8496-(2016)-02-0052-04
收稿日期:2016-02-27
作者简介:张智华(1983-),男,讲师
基金项目:全国交通运输职业教育教学指导委员会2015年交通运输职业教育科研项目(项目编号:2015B67);2015年南通航院院级科技重点课题(项目编号:HYKJ2015A02);2015年江苏省大学生实践创新项目(项目编号:201512703017X);2015年江苏省航海学会课题(项目编号:2015C04)
Stability Control of Lifting Weight System of Bridge Crane
ZHANG Zhi-hua,LI Shen-yong,XU Yong,ZHANG Chuan-tao
(Nantong Shipping College,Nantong 226010,China)
Abstract:By establishing a simplified mathematical model for the lifting weight system of bridge crane,this paper puts forward the intelligent control methods of fuzzy self-adaptive PID based on the proposed displacement and angle control,and designs the attitude PLC control system.The experiment shows that this control method can make the lifting weight system to keep stable quickly,resulting in improving the work efficiency and the safety of the crane.
Key words:bridge crane;lifting weight system;stability control;fuzzy self-adaptive PID
