基于摄影测量的路表三维模型建立
2016-07-25侯相琛
孟 浩,侯相琛
(广东省交通运输规划研究中心,广东广州510101)
基于摄影测量的路表三维模型建立
孟浩,侯相琛
(广东省交通运输规划研究中心,广东广州510101)
摘要:文章详细研究摄影测量的基本知识和理论方法,从理论上验证了此方法获取路面点位三维坐标的可行性。然后介绍相机双目视觉理论,由相机的成像模型引出相机的畸变参数,并给出了本文的相机标定方法,得到了本实验相机的内部参数。最后利用摄影测量的方法进行室内的路面模型试验,并把试验得到的点位相对距离与实际点位距离作比较,分析误差的产生原因并最终生成可视化的路表三维数字模型,结果表明本方法建模具有良好精度和准确性。
关键词:路面三维;摄影测量;双目视觉;路表试验
目前道路的三维可视化研究,基本都是从路面测量获得的数据,或是对GPS、航测遥感、公路CAD集成技术,开发数字地面模型系统,从而建立三维道路模型,获取的数据一是数量不够大,再是质量也不高,难以真实反映路表情况[1]。而且这些重构都仅从道路路线设计优化出发,重视路面的宏观信息,重构的道路不能很好的反应出真实路面的特征,如路面车辙、坑洼和拥包等,而且在三维路面上不能交互显示路面检测数据[2,3]。
本文试图解决这一问题,将道路检测出的数据充分应用到道路三维重构中,利用近景摄影测量的方法建立道路整体三维模型,动态浏览道路检测效果,可视化地再现真实路面。
1 摄影测量基本原理
1.1 摄影测量常用坐标系
摄影测量的常用坐标系有物方空间坐标系D-XYZ,像空间坐标系S-xyz,辅助空间坐标系S-XYZ和像平面坐标系o-xy,如图1所示。
1.2 双目视觉原理
摄影测量主要是运用双目视觉的方法,拍摄立体像对,然后通过空间后方交会和前方交会方法求得道路表面点位三维空间坐标。其中最重要几何关系是共线方程,见公式(1)。

图1 摄影测量常用坐标系

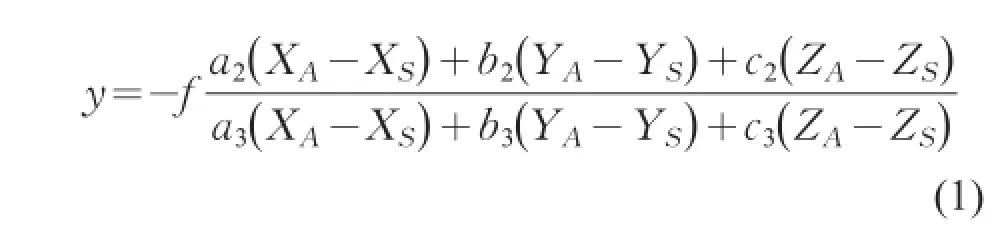
上式即为著名的共线条件方程式。不难证明此式中的x式是一个平面方程,而此式中的y式是另一个平面的方程;此两平面的交线,即是像点、投影中心和物点三点的连线。
当未能以像主点作为原点量测坐标时,共线条件方程式需引入主点坐标值(x0,y0),并顾及像点自身系统误差改正值(Δx,Δy)有公式(2)。
此式左方的一些符号意义在于:

①未能以像主点作为原点测量坐标,因而引进了主点坐标值(x0,y0);
②像点坐标自身需要引进某种系统误差的改正值(Δx,Δy)。
2 相片特征匹配
摄影测量双目视觉中关键的一步就是获取各个标记点位在相片上的像坐标(x1,y1)和(x2,y2),也就是通过两幅图像来获取路表的三维坐标信息,立体特征匹配是其关键技术,首先找到两幅图像中的对应同名像点,然后才能计算点的视差和深度信息。
一般而言,按照选择匹配基元的不同,特征匹配可以分为基于灰度的匹配和基于特征的匹配[4]。
与此相应,特征匹配的基元一般分为点、线和区域,它们分别具有各自的优点和缺点如表1所示。
考虑到试验的研究对象是道路路面,因此还要进一步考虑路面实际性能和状况,试验决定使用人工标记路面点位进行特征点匹配的方法,即在路面每隔一定距离呈格网状布置一些点,用颜色醒目的标记贴做好标记,如图2所示,即为室内模型的点位标记图。
路面特征点位标记完毕,就可以在左右像对上进行同名像点的匹配工作,能够获得各个标记点的相坐标,为后续的计算分析做准备。
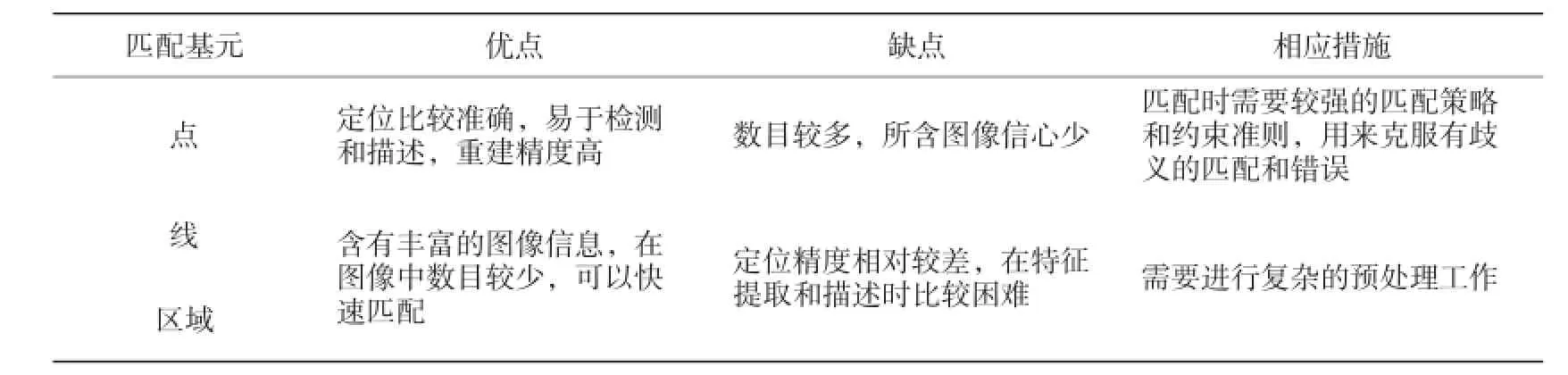
表1 匹配基元及其优缺点

图2 室内模型点位标记
3 测量相机的标定
用于测量的相机通常分为专业的量测相机和非量测相机,量测相机一般具有固定的焦距,较高精度的CCD系统以及较小的相机畸变,而一般的非量测相机比如单反相机等一般具有可以调节的焦距和比较大的相机畸变,无论哪一种相机,在使用时都必须进行相机参数的标定。
目前的研究结果认为主要有三部分,即径向畸变、偏心畸变和薄棱镜畸变[5]。径向畸变只产生径向位置的偏差,后两类既产生径向偏差同时也产生切向偏差,如图3所示为拥有畸变的成像模型[6]。

图3 有畸变的成像模型
相机标定的一般步骤如下:
3.1 拍摄标定相片
本文采用的相机型号是佳能的单反550D,其标定模板如图4,是红绿标定板,共9块,每块边长15 cm,包含5个随机红绿色的圆形识别点。
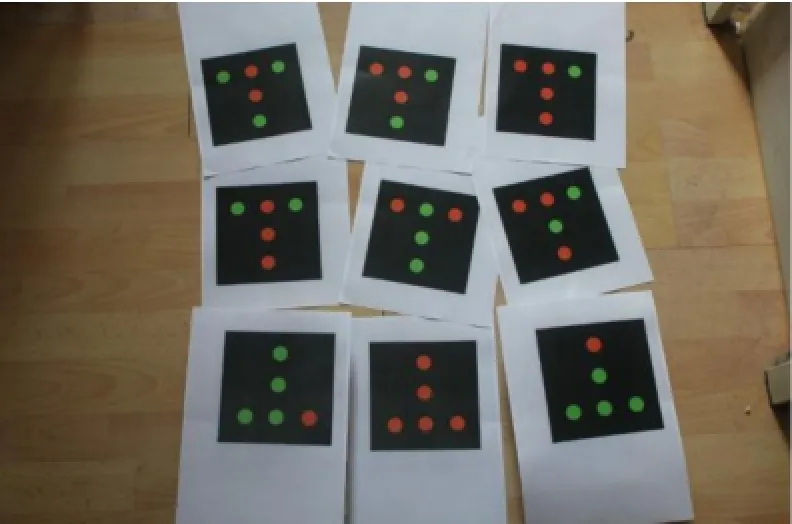
图4 标定模板
(1)将9张标定板均匀散布在地板上,将单反相机对焦模式从自动调焦模式(AF)切换为手动调焦模式(MF)。
(2)控制相机的高度,调节镜头直至标定板满布镜头且物象清晰后锁定调焦,从标定板斜上方的四个方向拍摄标定板,每个方向分别采用横拍和竖拍两种方式,拍摄4*2张像片作为相机标定相片。
3.2 图片预处理
因拍摄环境因素影响,拍摄像片的标定板上标志点的颜色并非纯红纯绿。为了不影响识别点的识别,故在相机标定前使用Photoshop软件进行像片的预处理。
3.3 相机标定结果
本文通过线性标定方法,并进行非线性优化的方法求取摄像机的内参数。前后两次的标定结果如表2所示。

表2 相机两次标定结果
从表中可以看见,前后两次的标定结果相差比较微小,焦距由27.863 mm变化到27.852 mm,相对变化在万分之四以内,但是像中心点坐标和内部畸变参数变化比较明显,特别是像中心点坐标偏移相对误差在百分之五左右,对最后计算精度影响比较大,所以考虑到提高后续试验的精度问题,每次试验都最好对相机进行标定工作,减小相机内部因素带来的误差,保证整个实验最终误差的合理性。
4 室内模型建模
通过标定过的相机拍摄室内标记点位的路面模型,运用摄影测量的方法,逐一获得路面模型上标记点位的相对坐标;然后通过MATLAB差值加密生成路面模型的三维数字模型,与实际模型表面高低起伏特征比较,通过数字模型模拟路面实际情况的相似度来说明三维模型描述实际路面状况的可行性;计算分析得到各标记点位图上的相对距离,并测量这些点位在路面模型上的实际距离,把图上测得的点位之间相对距离和实测点位相对距离作比较,可以得到用摄影测量建立路表三维模型的误差和精度,通过误差也可以分析得到误差的相关来源,用以改进完善试验的方法和流程。
4.1 试验准备
室内试验路面模型使用的是硬质塑料板,材质是聚苯乙烯,相比于其他材质,这种塑料板结构细密,短时间内不易变形,稳定性良好,因此选择它作为路面模型的材料,也是充分考虑到了材料的特性。
如图5所示,是本次室内试验的路面模型,模型长800 mm,宽600 mm,厚60 mm,较长边一侧被人工填高,另一边中点处人工挖开,角点处也人工处理作下陷状,这样的处理使得路面模型整体呈现一边高、一边低的起伏走势,肉眼可以明显识别,有着比较明显的路表起伏特征,便于试验的处理和验证,此外还准备了两把刻度准确的钢尺,以便校核。
4.2 实验过程
4.2.1 点位标记
为了有效的识别匹配同名像点,还需要在模型表面事先用标记贴每隔5-6 cm标记好点位,如图所示为所使用的标记贴,直径6 mm,因为模型背景是蓝色,所以这里选用较为显眼的红色标贴,均匀分布在整个模型表面,共计140余点,包含了模型填高的区域和低洼的区域。如图6所示为标记贴和标记好的路面。

图5 路面模型

图6 标记贴和标记好的路面
4.2.2 像对特征点识别和匹配
像对特征点识别和匹配的目的就是为了获取各个标记点位在相片上的像坐标(x1,y1)和(x2,y2),进行前方交会计算,最终得到模型路表标记点位的实际坐标值。
左右相片经过一定的预处理,导入到软件,以左相片为基准,在左右相片标记点位中心处逐一拾取同名像点,过程尽量保证鼠标在标记位置中心处拾取,控制同名像点拾取的精度,减少特征匹配的误差,匹配结果如图7所示。

图7 相片特征点匹配
4.3 实验结果
通过特征点的一一匹配,得到模型上标记点位的视差,通过摄影测量相关几何关系计算,分别得到每一个特征点的具体相对三维深度坐标,最后再将坐标在画图软件MATLAB里面显示出来,经过插值加密以后,便得到了此模型路面的三维数字模型。
如图8所示,把数字三维模型和模型实体作比较,结果发现:
(1)模型一侧偏高,一侧低洼的大体起伏在三维图中得到了较好的体现。
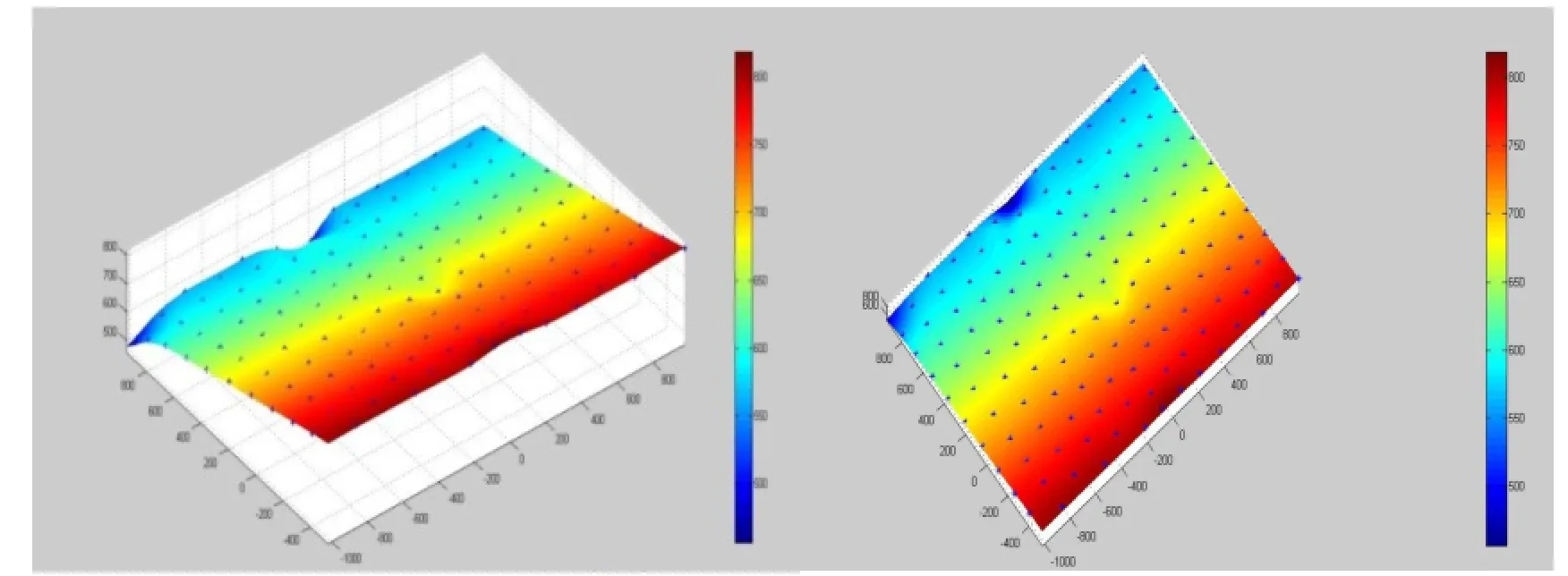
图8 模型的数字三维
(2)主要的两处特征点,一处是较高侧中点位置是模型的最高点,第二处是较低侧的中点和角点是模型的两个低洼点,这两处特征在三维模型中都有着很好的体现。
(3)三维模型和实际模型相比较,发现其高低起伏基本上相似,可以一一对应,由此可以看出此方法可以大体建立出路面的真实三维模型。
4.4 精度分析
由于没有真实的控制点位坐标,所以路面模型的真实坐标无法求得,得到的是整体模型内部的相对坐标,所以考虑用点位相对距离来描述最终的测量精度。
点位之间的图上相对距离和实际距离之间并不相等,存在一个比例系数,这个比例系数称之为解算比例尺λ,λ的定义就是图上距离和实测距离的比值。
精度分析就是随机挑选若干点对,实测距离,进行精度检验,经比例尺调整后得到结果如表3。

表3 三维模型精度表
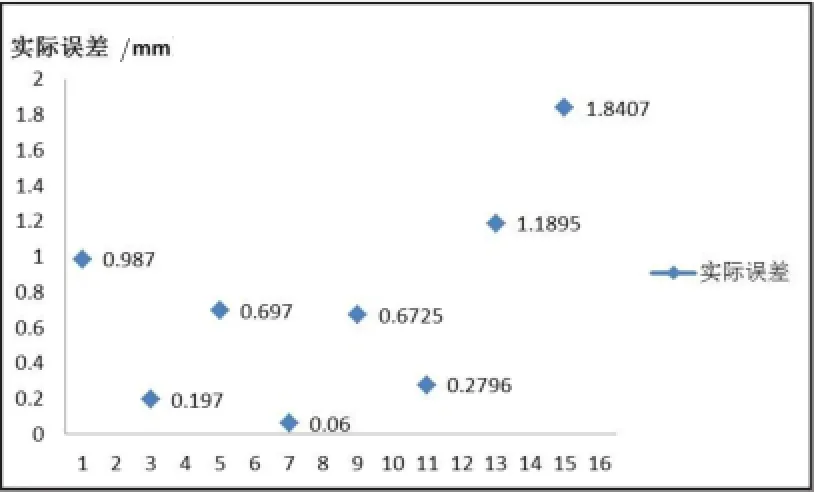
图9和图10分别不同点位是比例尺调整得到调整后的距离,与用钢尺测量出这些点位的实际距离相比较的实际误差图和相对误差图。其中:

图9 相对误差散点

图10 绝对误差散点
(1)由在直尺上标记的1,2,3,4号点位可以计算出解算比例尺约等于2.508,这里采用的是用样本平均数近似整体平均数的方法。
(2)计算各点位的图上相对距离,经解算比例尺调整得到调整后的距离,与用钢尺测量出这些点位的实际距离相比较,由此看出比例尺调整后相对定向测得结果与实测得结果误差均在±2 mm以内,大多误差不超过±1 mm,相对误差最小0.1‰,最大3.52‰,精度较为良好,结果较为准确。
分析试验的主要误差来源,不难得出以下几点:
(1)相机内部畸变误差难以完全消除。
(2)特征点拾取的同名像点没有足够均匀满布在像片中。
(3)由于操作原因,特征点的同名像点辨认和拾取存在误差。
(4)钢尺和水准测量获取模型路面点位真实坐标尺寸时存在误差。
5 结语
本文主要研究了利用摄影测量所学的知识和道路学科相结合,找到一种全新的路面三维模型的建立方法,提高路面三维模型的精度,降低所需劳动力和成本。
(1)文章使用摄影测量学的方法分析路面三维建模的可行性,把测量学和道路学科创造性的结合起来,为道路三维建模和路面养护管理提供了一条新的途径。
(2)文章结合理论分析,通过室内路面模型试验,求得模型路面点位三维深度坐标,并把试验得到的结果和真实数据比较,研究证明用摄影测量的方法确实可以建立路面的三维模型,建模的精度和准确性均达到较好水平。
参考文献:
[1]马荣贵,汪花梅.基于GPS和车辙的三维路面重构[J].同济大学学报(自然科学版),2012,40,(10):1517-1521.
[2]啜二勇.国外路面自动检测系统发展综述[J].交通标准化,2009,(204):96-99.
[3]左小清,李清泉,唐炉亮.公路三维模型建立与数据组织[J].武汉大学学报,2004,29,(21):179-183.
[4]马荣贵.路面三维检测系统原理及方法研究[D].长安大学,2008.
[5]Hass R.,Hudson W.R.,Zaniewski J.Modern Pavement Management[M], Florida: Krieger Publishing Company,Malabar,1994.
[6]Jenke P,Wang M.Bayesian point cloud Reconstruction [J].Computer Graphics Forum, 2006, 25, (3):379-388.
研究方向:交通运输咨询
中图分类号:U412.24
文献标识码:A
文章编号:1671-8496-(2016)-02-0016-06
收稿日期:2016-04-07
作者简介:孟 浩(1991-),男,助理工程师,硕士
Photogrammetry-based 3D Modeling of Pavement
MENG Hao,HOU Xiang-chen
(Guangdong Provincial Transport Planning&Research Center,Guangzhou 510101,China)
Abstract:The article studies the basic knowledge and theory of photogrammetry method,verifies the feasibility of this method for 3D pavement,introduces the camera binocular vision theory and the distortion parameters from image model of the camera,and provides camera calibration method and the camera's internal parameters.In the end,an indoor pavement model test is made by photogrammetry and an comparison analysis of the relative distance of points with the real distance of points to find the causes of error and generating the visualization digital 3D model of pavement.The results show that this modeling has fine precision and accuracy.
Key words:3D pavement;photogrammetry;binocular vision;pavement test
