高空气球吊篮姿控用精简反捻控制系统设计
2016-07-21张大伟周江华黄宛宁
张大伟 周江华 黄宛宁
1.中国科学院大学,北京100049 2.中国科学院光电研究院, 北京 100094
高空气球吊篮姿控用精简反捻控制系统设计
张大伟1周江华2黄宛宁2
1.中国科学院大学,北京100049 2.中国科学院光电研究院, 北京 100094

提出一种在不加外部力矩测量装置前提下,利用智能驱动器控制力矩电机工作在电流闭环模式的精简反捻控制系统,通过控制电机绕组电流值以达到解耦和卸荷作用。首先,通过对现有反捻设计方案的分析,提出了精简反捻控制系统设计方案。其次,分别对该反捻器的系统级和电路级进行了仿真和分析,进一步验证了可实现性。最后分析其与反作用飞轮控制系统配合构成的吊篮姿态控制系统具有控制精度高和结构简单的优越性。 关键词 高空气球;吊篮控制;反捻器;力矩电机;电流闭环控制
高空气球是指飞行在平流层的无动力飞行器,球体内充满氦气,可携带各种设备漂浮在30~40km的高空中。气球携带的设备基本上都装在吊篮内,吊篮通过缆绳与气球连接。吊篮搭载的一些科学观测仪器有稳定指向要求,仪器的俯仰姿态一般是直接控制,方位姿态则是通过控制吊篮的方位来实现。
吊篮方位姿态控制系统由姿态驱动系统和反捻控制系统2部分构成。姿态驱动系统负责控制吊篮姿态,有控制力矩陀螺和反作用飞轮2种方式。前者控制力矩大、控制精度高,但机构复杂,成本高,且能量消耗较大。后者虽然控制效率和精度不如前者,但机构简单容易实现,且成本和能耗相对较低。
反捻控制系统负责去耦合和飞轮卸荷。高空气球飞行时会缓慢旋转,为了克服吊绳扭转对吊篮方位的影响,吊绳和吊篮之间通常用推力轴承连接。轴承虽然隔离了大部分的吊绳扭矩,但受摩擦力影响,残余扭矩会不可避免地传递到吊篮,如果不能消除其影响就会造成飞轮饱和,失去调节能力。反捻机构通过反向扭转吊绳达到去耦合的作用。但是反捻机构的去耦合功能不可能完全理想,残存的力矩随时间的积累,仍可能造成飞轮饱和,反捻机构还需要产生附加主动力矩实现飞轮的卸荷。
1 现有反捻控制系统设计方案分析
目前已有的反捻器设计方案分别出自文献[1~3],反捻器均由反捻电机和吊绳扭矩测量装置两部分构成,利用扭矩测量装置测得的扭矩值作为反捻电机的反馈控制量来解耦和卸荷,不同之处在于扭矩测量装置机械结构的设计。
文献[1]的反捻控制系统结构示意图如图1所示,反捻机构主要由上法兰盘D1、下法兰盘D2、推力球轴承、反捻电机、扭矩传感器及其附属件构成。D2与吊篮通过板簧连接。扭矩传感器连接在D2与吊篮之间,反捻电机装在D2上,当力矩传感器敏感到D1传递给D2的干扰力矩后,可通过反捻电机对法兰盘D1实施反捻,消除干扰力矩。此扭矩传感器并不真正传递扭矩,只是运用应变片的形变量与受力大小成正比的特性实现对扭矩的测量。对加工工艺要求很高,板簧扭转时的迟滞、间隙和死区效应,均会直接影响扭矩的测量效果。此外,对传感器的标定过程也很麻烦,会不可避免地引入测量误差,再利用测量值作为反馈来控制反捻电机就很难达到理想解耦效果。
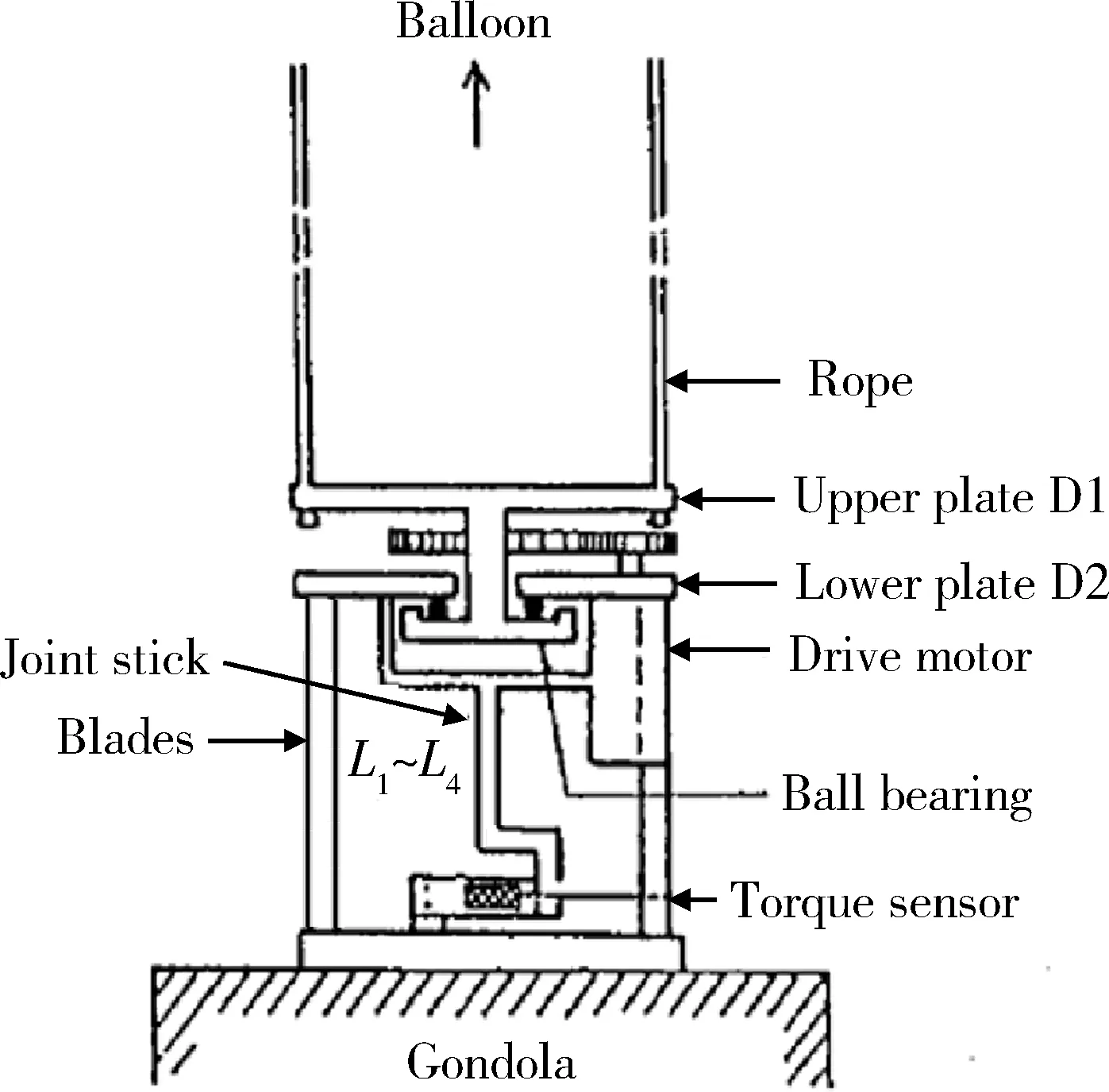
图1 文献[1]中的反捻器结构示意图
文献[2]的反捻机构延用了文献[1]的结构,但力矩测量细节有一些区别。D2与吊篮之间改用81根钢片连接,扭矩传感器属于直接测量型传感器。传感器的扭转刚度要远大于连接刚片的扭转刚度。否则,测量结果会受到钢片的干扰。这2种反捻方案对结构设计的要求很高,机构过于复杂,实现起来有相当难度,可能还存在其他的困难,如标定、结构上的脆弱性、板簧扭转和拉伸可能出现耦合等。
图2为文献[3]中反捻器方案硬件结构示意图。反捻装置由圆柱刚性外壳、推力轴承、扭变器和反捻电机构成。其中圆柱外壳、电机本体、推力轴承和吊篮为刚性连接,吊绳法兰盘通过扭变器连接到电机轴上。此方案中扭矩传感器无法敏感出推力轴承的摩擦力矩,只能部分反映吊绳所传递的力矩,不能实现理想的去耦。若将此反捻系统与仅有推力轴承的装置相比,其去耦功能反倒不如后者,这一结论,可以引用文献[3]中给出的数据:轴承摩擦力矩0.6~0.9N·m,去耦后的残余力矩约2N·m,比轴承摩擦力矩大1倍还多。

图2 文献[3]中的反捻器硬件结构示意图
2 精简反捻系统方案
文献[1-2]中扭矩传感器测量值基本反映了吊绳传递的全部力矩信息,理论上可以实现理想去藕,但机构非常复杂,实现起来比较困难。文献[3]中,扭矩传感器测量结果中不包含推力轴承摩擦力矩,只反映了吊绳所传递的部分力矩信息,无法实现理想的去耦合,但实现起来比较容易,选择低摩擦轴承对该方案很关键。3个方案均以吊绳传递的全部或部分扭矩的测量值作为反捻控制的基础。而吊绳的扭转状态需要累积到一定程度后,才能产生被传感器所敏感的扭矩。因此,以扭矩作为被调节量,存在一定的滞后,且要求扭矩传感器足够灵敏,否则会造成解耦作用不够彻底。
兼顾结构设计,成本和灵敏度,本文提出了以电流反馈代替力矩反馈的精简反捻控制系统设计方案:控制电机绕组电流为0值或飞轮卸载力矩等效的值(此值由姿控系统卸载逻辑计算得到),实现对吊篮解耦合或卸荷。吊篮姿态控制系统的整体框图如图3所示,吊绳扭转产生的干扰力矩使反捻电机转子与定子相对转动,此相对转动使电机绕组产生感应电动势,控制器反馈电流值非0,此时控制电机绕组电流值为0,可使反捻电机产生对干扰力矩的跟随力矩,达到解耦合的目的,此力矩呈交变力矩,交变频率越高,控制误差越小。因此,加快反捻器响应速度可以遏制反捻残余力矩的影响。同样,当飞轮转速将达到饱和时,卸载逻辑会根据飞轮卸载力矩需求计算出反捻控制器电流命令值,控制反捻电机实施卸荷。单独对反捻控制系统而言,解耦合和卸荷的物理实现过程是一样的,因此本文后续通过仿真介绍此反捻控制系统可行性时以解耦为目标。此反捻器结构示意图如图4所示,转子与法兰盘刚性连接,定子固定在圆柱形外壳底部。控制器用电流反馈代替了力矩反馈,因此不需要外部力矩测量装置。其优点是结构更加简化,控制简单,响应快,不会引入力矩传感器测量误差。图5为此反捻系统的三维结构图。
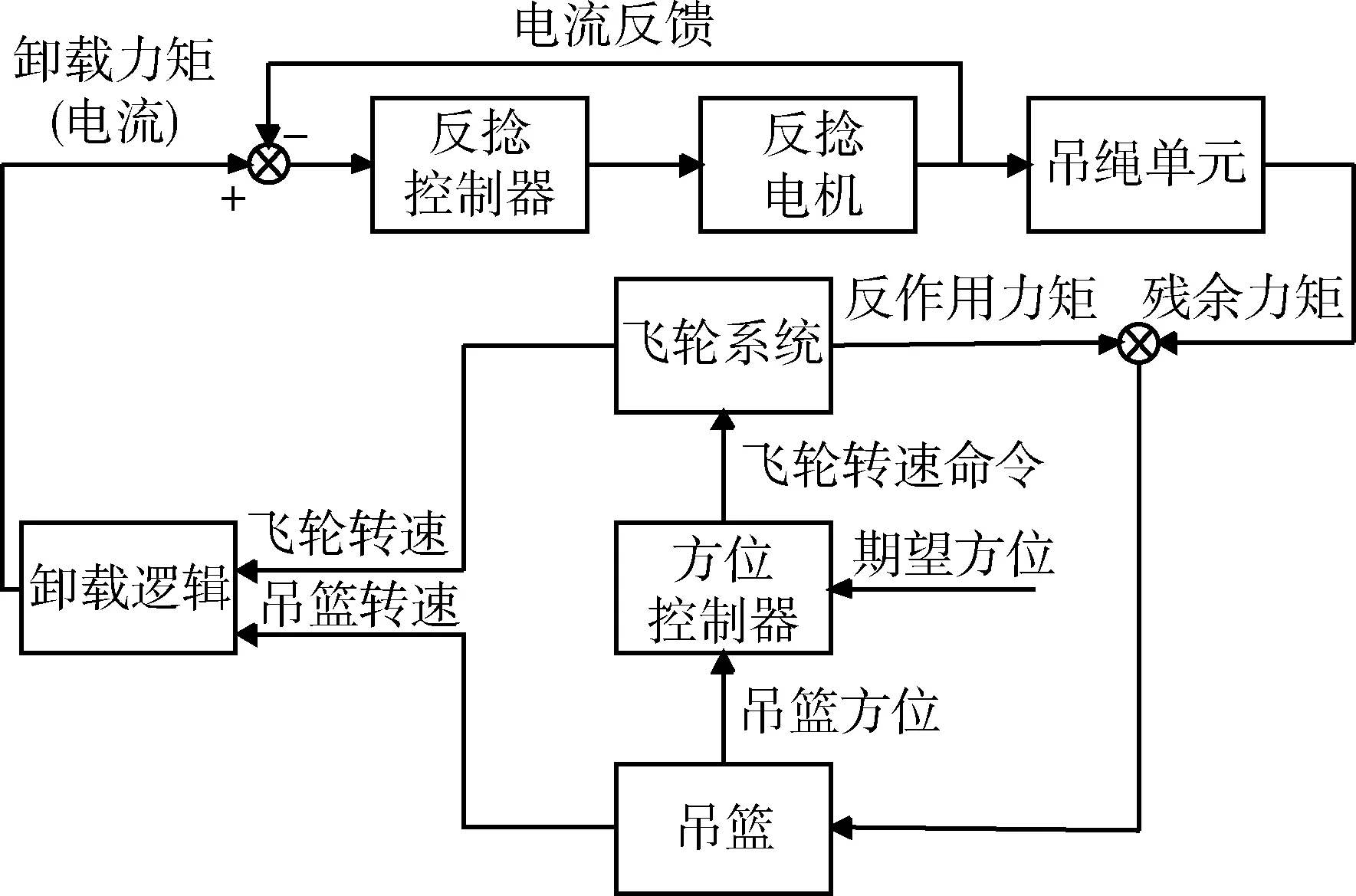
图3 吊篮姿态控制系统整体框图
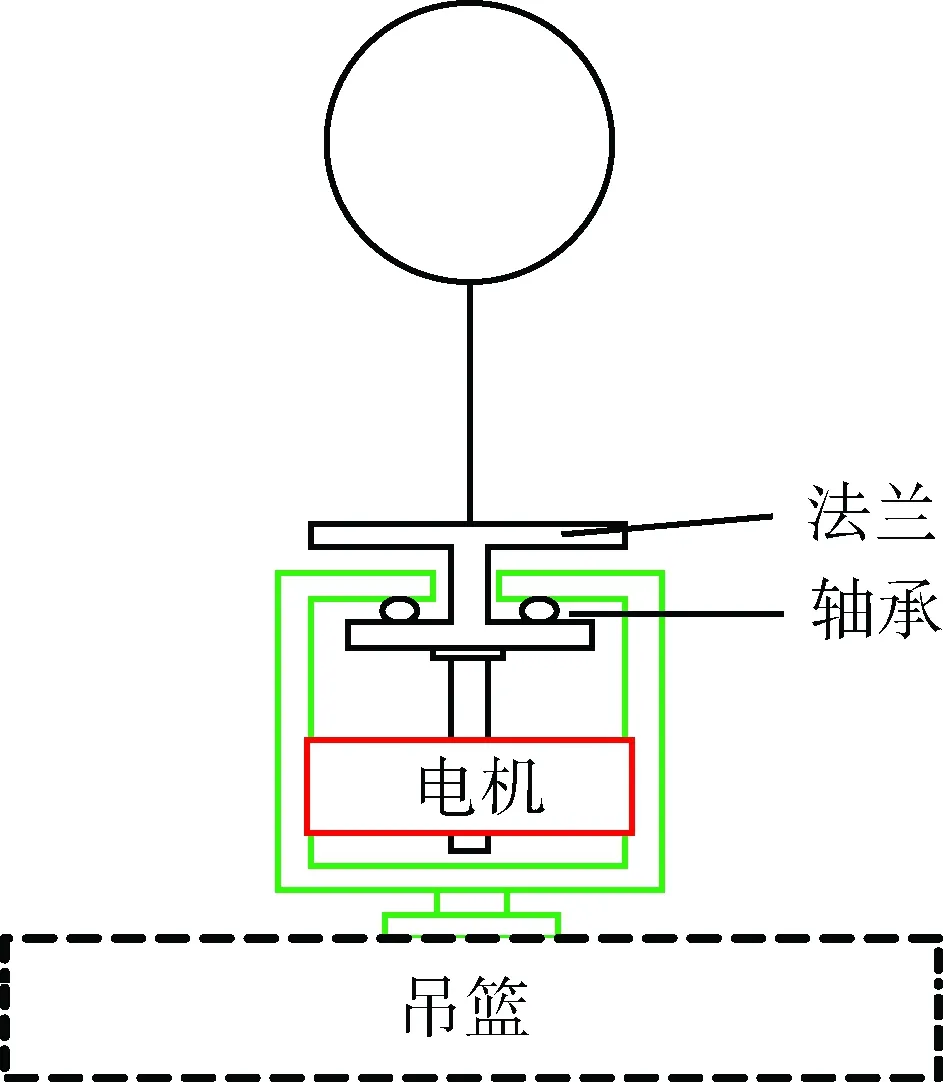
图4 精简反捻控制系统硬件结构示意图

图5 精简反捻控制系统三维结构图
本方案中的反捻驱动装置不能用电机加减速器(减速比为1∶n;(n>1)),否则电流噪声会被放大n倍。因此反捻电机选择力矩电机,驱动器选择与反捻电机电压电流范围相当的一款智能驱动器。其它结构设计细节与本文关系不大,不做阐述。
3 反捻控制系统设计
根据电机电枢回路动态平衡关系式,结构力学关系式,如式(1)~(4)所示,得到反捻控制系统模型框图如图6所示。
(1)
(2)
ωed=ωd-ωG
(3)
TRope=Krop(θd-θBall)
(4)

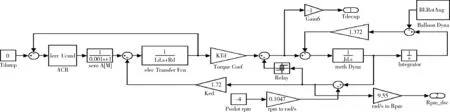
图6 反捻控制系统模型框图
反捻控制器(ACR)采用PI控制,在扰动点前后分别是驱动器和电机的等效一阶惯性传递函数,控制器传递函数见式(5),其中,Ki是积分增益,比例增益Kp=Kiτ。
(5)
图7是与图6对应的信号流图,其中有3个独立回路L1,L2和L3。输入分别为力矩(电流)命令Tcmd(icmd),气球角速度ωΒαll,吊篮角速度ωG和摩擦力矩Tf,其中后3个为扰动量。输出量为吊绳力矩值TRope。根据梅森公式,各输入(对于系统来说可看做阶跃信号)单独作用于系统时的传递函数如
式(6)~(9)所示(稳态分析时认为τs±1≈1):
(6)
(7)
(8)
(9)

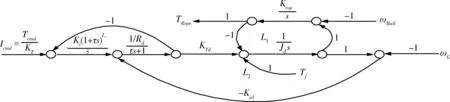
图7 反捻控制系统信号流图
根据终值定理(如式(10)所示),在S域对上述4个输入单独作用时输出的稳态分析如表1所示,此反捻系统可以对外界扰动气流造成的气球和吊篮随机转动实现完全解耦。虽不能对轴承摩擦力矩实现解耦,但根据系统对卸载力矩的跟随效果,可以外加卸载力矩消除此吊绳残余力矩。因此,此精简反捻控制系统可实现去耦合和卸荷的效果。
(10)
本吊篮控制系统的控制目标是重约700kg的吊篮,根据所选结构进行力矩需求分析后,反捻电机选用国内某研究所特殊定制的J160LYX45力矩电机,

表1 输出信号稳态分析
其详细参数列于表2。由仿真分析计算得控制器的比例增益Kp=Kiτ=9.48,积分增益Ki=2370/50。需要注意的是Ki值不能取太大,否则式(6)~(9)中传递函数会出现共轭纯虚数极点,使输出产生振荡,得不到理想跟随效果。

表2 电机主要技术参数
4 反捻器系统级仿真
根据第3节建立的反捻系统模型,设定初始输入电流命令值为0;吊篮自身的随机转速ωG=4rpm;轴承静摩擦力矩Tf=0.5N·m;文献[1]指出高空气球平流层转速在0.1~0.01rpm之间,我们在2004年做的2次高空气球项目的相关试验数据也显示气球的转速保持在这个范围之内,保守考虑,取气球做ωBall=0.1rpm的匀速转动。
对此反捻系统仿真后得到反馈电流的曲线如图8所示,曲线在刚开始的前6s内超调比较大,波动较剧烈,随后曲线渐变平缓,大约8s后电流值基本保持在0点附近,整定效果比较理想。在控制过程中吊绳力矩的变化曲线如图9所示,在刚开始控制的前5s内,力矩变化比较剧烈,以后渐变平缓,保持为0.5N·m,与轴承摩擦力值大小相等。验证了上面提到的此反捻控制器无法消除轴承摩擦力矩的结论。
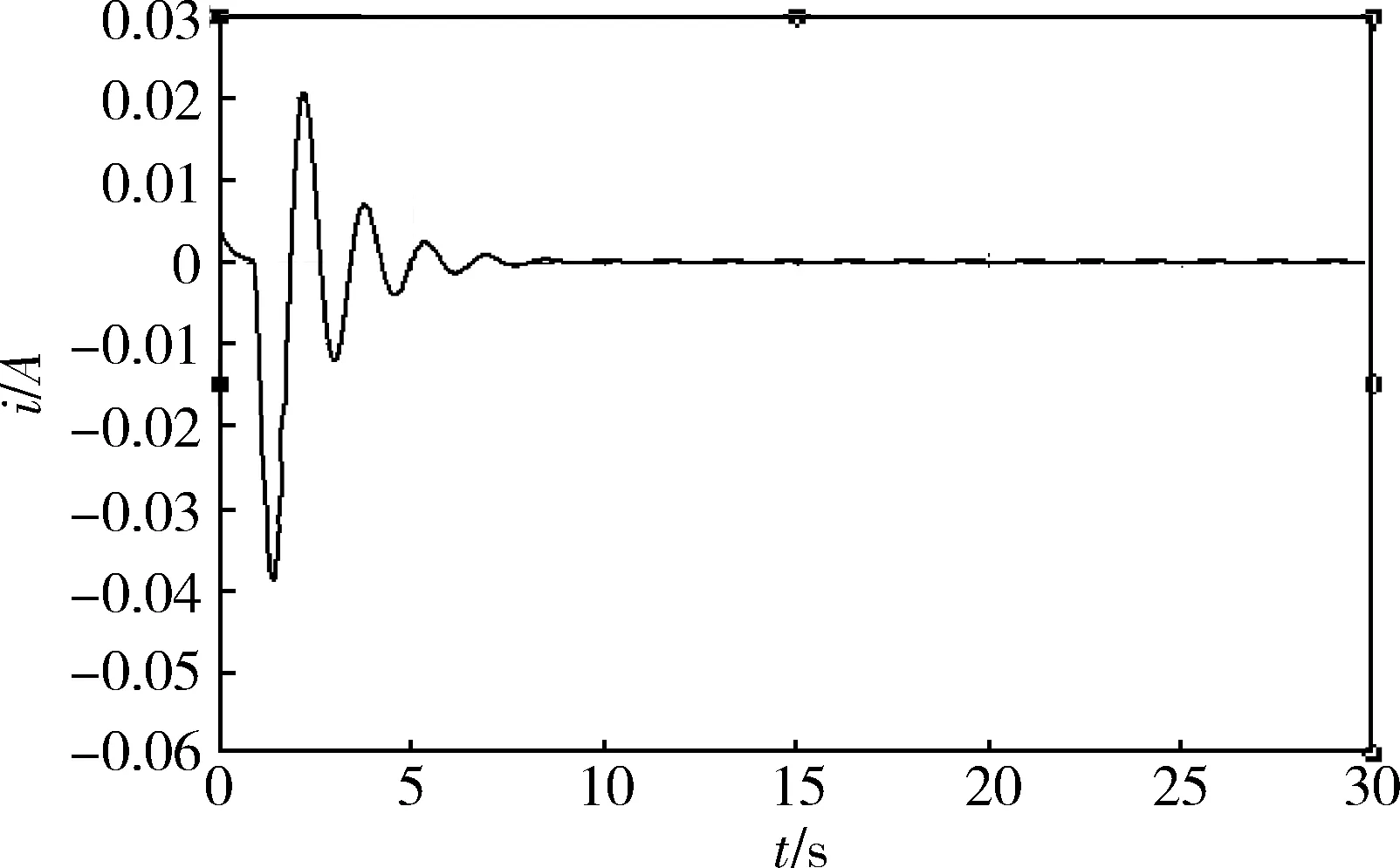
图8 反捻控制系统反馈电流曲线
5 反捻器电路级仿真
上一节所做的系统级仿真为了加快仿真速度,

图9 吊绳力矩变化曲线
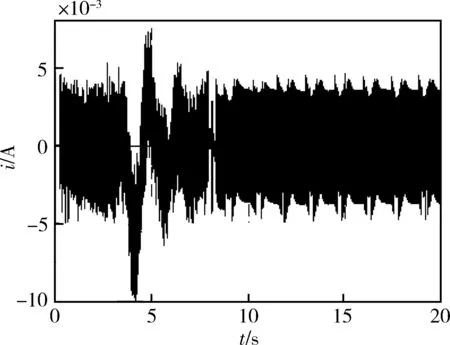
图10 反捻控制系统反馈电流变化曲线

图11 吊绳力矩变化曲线
对电机驱动器和电机的数学模型进行了理想化的简化和近似。本节则利用Matlab提供的电力电子仿真工具箱,将电机驱动器和电机用实际电路模型代替,如图12所示,评估其考虑实际电路特性后对控制回路的影响。反捻器电流环(力矩环)控制器输出的控制参考电压送入PWM发生器,将PWM发生器输出的脉冲作为门信号,控制由功率MOS管构成的双臂全桥的通断,构成直流有刷电机的两相电源输入来驱动电机转动。PWM发生器基准频率取4kHz。图13给出反捻器电路级仿真的整体框图,仿真后得到的反馈电流曲线如图10所示,与图8相比,电流值同样在大于8s后保持在0值附近,但曲线由原来的连续点变为了一系列离散点,这是由系统自身的连散性决定的。图11所示是吊绳上力矩值变化曲线,与图9的控制效果一样,只是采用电力电子仿真后,由于其内部器件对信号的延时比系统级仿真大,因此控制曲线的脉动较理想模型稍小,这符合实际规律。

图12 电机驱动器和电机实际电路模型
图13 反捻器电路级仿真整体框图
6 吊篮姿态控制仿真
采用此反捻器的吊篮姿态控制系统的框图如图14所示,期望方位角为-22°,初始方位角为0°。从仿真结果图15看,方位角实现了小于0.1°的稳定控制。图16为吊绳扭转角及气球和反捻器转角曲线,从图中可以看出在大约15s后气球和反捻器的转角值相等,吊绳扭转角保持为0值,吊绳无向下传递的力矩,即实现了完全解耦。这表明设计参数和设定指标合理可行,且所选定的飞轮电机和反捻电机能够满足控制需求。
7 结论
通过对现有的反捻器设计方案进行分析,提出了无需外部测量装置工作在电流闭环模式下的精简反捻器设计方法。对反捻器进行建模后,首先分别对不同扰动输入所对应的输出稳态值的分析证明了此反捻器的理论可行性,然后分别从系统级和电路级对其进行了仿真分析,进一步论证了其可实现性以及响应快和结构简单的优点。下一步将通过飞行试验验证此高空气球吊篮姿态控制系统实际控制性能和精度。

图14 吊篮控制系统框图

图15 吊篮控制系统控制效果仿真曲线
图16 吊绳扭转角及气球和反捻器转角
参 考 文 献
[1] 矢岛信之,小锻治繁,桥野贤.气球搭载望远镜方向控制系统研究[M].日本:机械技术研究所, 1986. (Namiki,Sakura-mura,Niihari-gun,Ibara.ThePointingControlofBalloon-BorneTelescope[M].MechanicalEngineeringLaboratory,Japan,1986.)
[2] 叶祥明. 大型球在望远镜高精度姿态控制及指向技术研究[D]. 北京: 中国科学院大学,1999.(YeXiangming.StudyonHigh-accuracyAttitudeControlandPointingTechnologyofaLargeBalloon-borneSolarTelescope[D].Beijing:UniversityofChineseAcademyofSciences,1999.)
[3] 王鸿辉,袁朝晖,何长安. 球载吊篮方位控制综合解耦器设计[C].ChineseControlConference(CCC),Xi′an, 2013July.(WangHonghui,YuanZhaohui,HeChangan.DesignofComprehensiveDecouplerforBalloon-borneGondolar’sAzimuthControl[C].ChineseControlConference(CCC),Xi′an,2013July.)
[4] 何琳琳,窦满峰. 高空气球吊篮姿态控制系统的一种实现[J]. 微电机,2006,6(39):77-80.(HeLinlin,DouManfeng.ASortofRealizationontheAttitudeControlSystemofNacelle[J].Micromotors, 2006, 6(39):77-80.)
[5]YuPeijun,XiaKeqiang,LiJiancheng.ADesignofReconfigurableSatelliteControlSystemwithReactionWheelsBasedonErrorQuaternionModel[C].InternationalConferenceonInternetComputing&InformationServices(ICICIS),HongKong,2011Sept.
[6]ToshihikoNakanoYS,MutsumiYamamoto.ThePointingControlMethodofBalloon-BorneTelescope[C].IEEE/SICEInternationalSymposiumonSystemIntegration(Sll),Japan, 2012December.
A Simplified Design of Decoupling Control System in Balloon Gondola
Zhang Dawei1,Zhou Jianghua2,Huang Wanning2
1. University of Chinese Academy of Sciences, Beijing 100049, China 2. Academy of Opto-Electronics, Chinese Academy of Sciences, Beijing 100094, China
Asimplifieddecouplingmechanismconsistingofintelligentdriverandtorquemotorwithoutexternaltorquemeasuringdeviceisintroduced.Thisdesignmethod,whichemploystheintelligentdrivertocontrolthetorquemotorincurrentclosedloopmodeandtokeepthewindingcurrentinacertainvalue,canbeusedtoachievethegoaltodecreasethespeedofthewheelmotoranddecoupledisturbancetorques.Bytheanalysisofexistingmethods,asimplifieddesignisimplementedtosimulatethedecouplingmechanisminbothsystemandcircuitlevels,andthenitisproventhatitcanofferacontinuouscontrolwithhighprecisionandreliabilitywhencombiningwithreactionflywheelcontrolsystem.
Balloon-borne;Nacelle;Decouplingmechanism;Torquemotor;Currentclosedloop
2015-10-15
张大伟(1986-),男,河北人,硕士,主要研究方向为飞行器控制与仿真;周江华(1973-),男,江西人,博士,研究员,主要研究方向为飞行器动力学与控制;黄宛宁(1980-),男,河南人,硕士,高级工程师,主要研究方向为浮空器测控。
V448.2
A
1006-3242(2016)04-0076-07