战术导弹协同任务规划研究
2016-07-21莫文骥苏丙未
廖 沫 刘 洋 莫文骥 苏丙未
空间物理重点实验室,北京100076
战术导弹协同任务规划研究
廖 沫 刘 洋 莫文骥 苏丙未
空间物理重点实验室,北京100076

分析了战术导弹协同作战模式和关键技术,重点针对导弹协同任务规划技术进行分析和研究,提出三级结构的导弹协同任务规划体系,研究和分析了战术导弹协同任务规划技术的主要内容和关键问题,研究并提出了协同目标分配、航迹规划等问题的模型和方法,对典型协同任务进行了仿真。 关键词 多弹协同;任务规划;目标分配;航迹规划
导弹协同作战是指多枚导弹相互配合、协作、共同执行战斗任务。美国在上世纪70年代提出了协同作战的概念,美国和俄罗斯等国家针对导弹协同攻击技术开展了大量研究,并研发了具有协同攻击能力的多种智能型导弹。美国的“网火”(NetFires)导弹武器系统是一种带指控系统的箱式发射火箭,将火力打击、侦察监视、效能评估和任务分配等功能通过数据链集成一体,采用巡逻攻击导弹与精确打击导弹协同作战模式,首先发射巡逻导弹(LAM),在GPS/INS导引下飞至指定目标区域上空盘旋滞留,用激光雷达搜索目标,发现敌方踪迹即发射低成本的精确打击导弹(PAM),LAM也可直接攻击目标。俄罗斯的花岗岩[1]超声速反舰导弹也是最早实现协同攻击的代表,导弹在武器系统计算机中建立了各类舰船的完整数据库,弹上计算机贮存了多种现代战船的目标特性数据、可能采用的战术编队与电子对抗措施、以及根据战场环境制定的攻防战略,并进行任务规划。具有“一弹对一舰”、“多弹对单舰”及“组弹对目标群”的多种攻击方式。
战术导弹作战灵活、弹道形式和攻击方式多样,容易实现多弹协同作战,提高导弹智能化水平和整体作战效能。协同任务规划是实现战术导弹协同作战的关键技术之一,利用多平台信息,合理分配和调度资源,进行多弹协同任务安排并指挥导弹协同完成任务。
本文分析了战术导弹协同作战模式,在此基础上对导弹协同任务规划的内容、关键技术和方法进行了分析和研究。通过一个实例阐述了战术导弹协同规划的关键技术和过程。
1 战术导弹协同作战模式和关键技术
战术导弹协同主要包括时间、空间、功能和平台协同等模式,在作战运用时往往是多种模式同时应用,实现导弹武器系统最佳效能[2]。典型的协同方式如下:
1)多弹齐射
在一次攻击中采用不同频率、类型的导弹在不同方向上齐射,利用多弹同时攻击突破敌方防空单元。
2)多弹突防
在不同时刻、不同区域发射的导弹同时到达某一防空阵地。利用数量、快速性和目标共享等优势实现单枚导弹依次攻击无法实现的突防效果。
3)编队导航、探测和攻击
在编队构成中,可由不同配置的导弹共同实现复杂的战斗任务,如编队飞行过程中,仅由一枚导弹或部分导弹安装地形匹配设备,经过匹配区完成地形匹配后,通过数据链共享导航修正信息,实现整个编队成员的导航修正。
导弹编队攻击海上运动目标群时,接近目标区域后,领弹高弹道飞行,开机探测目标群数据,在编队内分配目标,通过数据链向其他编队成员发送攻击目标信息,领弹自身也具备攻击能力,完成目标分配后直接攻击目标。其他成员导弹配备低成本短距离探测设备,接近目标后低弹道飞行以提高生存能力,接收到攻击目标信息后低弹道逼近目标,满足探测距离后开机锁定目标进行攻击。
4)“静默”攻击
一枚或多枚导弹接近目标时开启主动雷达导引头,获取目标信息的同时吸引目标的注意力,转移火力。目标信息通过数据链发送给其他编队成员,使其有机会从侧面接近攻击。
目前,还出现了干扰弹和战斗弹协同及不同类型导弹之间协同及巡逻-攻击协同等新概念协同方式,随着技术的发展和导弹武器性能的提高,新的协同方法将不断出现并得到应用。
2 导弹协同任务规划关键技术
导弹协同任务规划的目的是在导弹发射前和飞行过程中,利用和协调导弹的系统资源,合理分配攻击目标及飞行航迹,对飞行动作进行协调安排,实现多发导弹协同完成作战任务。任务规划可分为预先规划和实时规划。预先规划是在导弹发射前制定目标分配计划,确定每发导弹从发射点到攻击区的飞行航迹。在线任务规划指在任务执行过程中,根据战场环境和任务变化,实时改变攻击目标和飞行航迹。不论预先规划或实时规划,均需解决协同任务规划体系、目标分配和航迹规划等问题。
2.1 导弹协同任务规划体系
协同任务规划体系规定任务规划的层级、指挥关系和信息流向等,是实现多弹协同的基础。图1为指挥中心-领弹-成员导弹3层任务规划体系,适用于战术导弹协同任务规划。

图1 战术导弹多弹协同任务规划体系
指挥中心任务规划根据上级下达的作战任务、目标、资源和战场环境等综合信息,进行全局任务规划,确定攻击波次、编队组成、编队任务和航迹等;接收领弹发回的信息,对编队任务重规划,发送至领弹,改变导弹编队的任务。
领弹掌握编队所有信息和任务,可接收上级任务指令,根据自身掌握的信息对编队进行任务规划/重规划,包括改变编队任务、重分配目标、更新编队或成员航迹,下发至成员导弹。领弹根据侦察信息分配编队目标,下发至各成员导弹。
导弹成员接收指挥中心或领弹的任务和航迹,也可自主规划任务,可实时接收领弹下发的任务目标,规划在线航迹,完成协同作战任务。
2.2 导弹协同目标分配
目标分配是指挥中心和领弹任务规划的重要内容,将多个任务分配给协同作战的导弹,使整体作战效能达到最大。
多弹协同目标分配包括分配准则、问题建模及问题求解3个方面。分配准则的制定需具体分析作战任务,确定目标函数以及约束;分配问题建模是根据具体的目标分配问题进行数学建模,以通过数学方法求解;分配问题求解是采用数学方法获取分配策略。
假设编队有N个导弹{M1,M2,…,MN},M个目标{T1,T2,…,TM},定义目标分配矩阵XNM:
定义目标分配参数:vi为导弹Mi的价值,表示导弹的战斗力;ρj为目标Tj的价值,表示目标的重要度;pi,j为Mi攻击Tj的效率,表示导弹摧毁目标的概率;ri,j为Mi攻击Tj的风险,表示导弹攻击目标被拦截摧毁的概率;Pthr,i,j为Mi到Tj的路径威胁,表示导弹飞行到目标点航迹过程中被摧毁的概率;Leni,j为Mi到Tj路径长度指标。

目标函数:J1(X)=A·U(X)+B·Y(X),其中A,B为权系数。

max(J1(X))
(1)
分配问题的求解是搜索问题,典型方法包括精确搜索,如穷举法或改进穷举法[3],启发式搜索如模拟退火、禁忌搜索、神经网络和遗传算法[4-5]等,多Agent分配如拍卖法[6-7],应根据具体问题,选择合适的算法。
2.3 航迹规划
航迹规划是根据航线地图、战场环境和任务目标等信息,制作导弹的飞行航迹。导弹航迹规划问题包括问题建模和航迹搜索两方面。
2.3.1 问题建模
航迹规划问题建模是分析导弹的飞行任务,确定航迹规划的目标、约束、影响因素及规划内容,建立导弹航迹规划数学模型。本文介绍基于Voronoi图(简称V图)的航迹规划模型[8-9]。
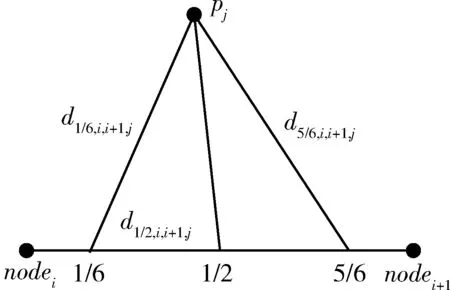
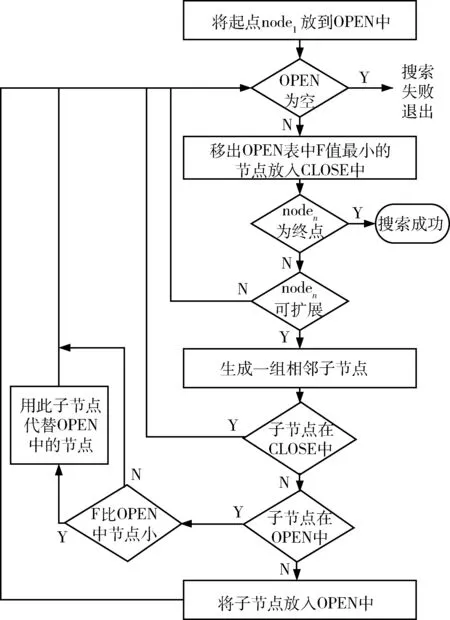
V图定义为:假设P={p1,p2,…,pN}为平面上N个互异点,任意两点距离为dist (pi,pj)。对于二维平面E2上任意点x,任意一点pi都对应一个区域V(pi)={x∈E2|dist (x,pi) 将威胁点集合P={p1,p2,…,pN}作为V图的母点,以任意相邻两点的中垂线组成V图,当导弹沿V图的每一条边飞行时,可获得相对高的安全系数,不偏向任何一方,受到来自两个点的威胁也最小。图2为包含起点、目标点(终点)和威胁点的V图,航迹规划即获得从起点到终点,途中经过匹配点的满足约束条件的最优航迹,航迹搜索对各V区域顶点进行搜索,形成沿V区域边的节点序列。如果起点、匹配点和目标点不在V区域边上,则在相应点和所在V区域的顶点连接线上进行搜索,如图2所示。 图2 包含起点、终点和威胁点的V图 图3 航路边(nodei,nodei+1)威胁代价定义 定义航迹规划的约束条件: 1) 最大航程约束:Len(S)≤Lmax,Len(S)为S的总长度,Lmax为导弹允许的最大航迹长度; 2) 匹配点约束:∀match(i)∈S,要求航路经过所有要求的匹配点。 基于V图的航迹规划问题定义为:对于威胁集合P={p1,p2,…,pN},匹配点集合match,通过航迹规划获取航迹S,使得: min(J2(S)) s.t.Len(S)≤Lmax ∀match(i)∈S (2) 2.3.2 航迹搜索 A*算法中设置OPEN和CLOSE两个表数据结构,用于存放V图中“待扩展”和“已扩展”的节点集合,A*算法流程如图4所示。 图4 A*搜索算法流程 对于如图2所示的规划问题,除了传统的搜索V图顶点外,还涉及起点、终点和匹配点的搜索,主要处理方式如下: 1) 如当前节点是起点,起点所在的V区域顶点均为子节点; 2) 如当前节点为包含终点的V区域,则终点也可为当前节点子节点; 3) 对于匹配点,用A*搜索生成起点到第1个匹配点的路径,然后依次生成到下一个匹配点的路径,最后生成到终点的路径,以满足匹配点约束。 3.1 协同任务和想定 以前述编队导航、探测和攻击协同模式为例,编队由具备地形匹配能力和远距离目标探测能力的领弹和仅配备短距离低成本目标探测设备的成员导弹组成。导弹编队飞行剖面如图5所示,领弹负责编队任务规划,沿预定航迹编队飞行至目标区域,领弹通过匹配区域进行地形匹配,修正导航信息,并通过数据链发送至其他成员导弹进行导航修正,实现编队高精度飞行。接近目标区域后,领弹提前打开目标探测设备探测目标群,在导弹编队内分配目标后向成员导弹发送攻击目标;成员导弹从领弹处接收目标初步位置信息,下压低空水平飞行,满足探测设备作用距离后锁定目标攻击,实现导弹编队对目标群的高效攻击。 图5 典型飞行任务过程 通过任务和弹道形式分析,考虑导弹爬升、下压历经的航程较短,因此协同任务规划的主要任务包括编队航迹规划和目标侦查后末端攻击目标分配。 3.2 编队航迹规划结果 采用前述方法构建航迹规划V图模型,采用A*搜索航迹规划算法,图6和7给出了含通过匹配点约束和不含匹配点约束2种工况的路径规划结果,根据不同的约束条件,沿V图边界分别得到了目标函数最优的规划结果。 图6 不通过匹配点的航迹 图7 通过匹配点的航迹 3.3 终端目标分配结果 根据前述目标分配模型,定义矩阵X4×6,由于末端路径较短,忽略飞行路径对目标函数的影响,目标分配仅受导弹攻击能力、目标价值、直接攻击风险的影响。考虑到目标分配的实时性,采用基于多Agent分布协同拍卖的动态目标分配算法[7],获得目标攻击矩阵为: 即导弹M1→T5,M2→T3,M3→T4,M4→T3。 分析了战术导弹协同作战模式,对战术导弹协同任务规划体系、目标分配和航迹规划等关键技术进行了研究和分析。通过仿真实例验证了编队导航、探测和攻击协同作战模式。 [1] 刘桐林.花岗岩—世界智能化飞航导弹的先驱[J].飞航导弹,2005(9):14-18.(LiuTonglin.IntelligentCruiseMissilePioneerGranite[J].AerodynamicMissileJournal. 2005(9):14-18.) [2] 林涛,刘永才,关成启,关世义,张克.飞航导弹协同作战使用方法探讨[J].战术导弹技术, 2005(2):8-12.(LinTao,LiuYongcai,GuanChengqi,GuanShiyi,ZhangKe.AnInvestigationintotheMethodsofCooperativeEngagementforAerodynamicMissile[J].TacticalMissileTechnology, 2005(2):8-12.) [3] 廖沫,陈宗基. 基于满意决策的多机协同目标分配算法[J].北京航空航天大学学报,2007,33(1):81-85. (LiaoMo,ChenZongji.CoordinatedTargetAssignmentinMulti-UAVBasedonSatisficingDecisionTheory[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2007,33(1):81-85.) [4]LeeZJ,SuSF,LeeCY.EfficientlySolvingGeneralWeapon-TargetAssignmentProblembyGeneticAlgorithmswithGreedyEugenics[J].IEEETransactionsonSystems,ManandCybernetics-PartB, 2003, 33(1):113-121. [5] 余舟毅, 陈宗基, 周锐. 基于遗传算法的动态资源调度问题研究[J].控制与决策,2004,19(11):1308-1311.(YuZhouyi,ChenZongji,ZhouRui.OnDynamicResourceSchedulingBasedonGeneticAlgorithm[J].ControlandDecision, 2004,19(11):1308-1311.) [6]AtkinsonML.ContractNetsforControlofDistributedAgentsinUnmannedAirVehicles[C].The2ndAIAAUnmannedUnlimitedSystems,Technologies,andOperations-Aerospace,SanDiego,California, 2003,AIAA-2003-6532. [7] 廖沫, 陈宗基.基于多Agent分布协同拍卖的动态目标分配算法[J].北京航空航天大学学报,2007,33(2):180-183. (LiaoMo,ChenZongji.DynamicTargetAssignmentMethodBasedonMulti-agentDecentralizedCooperativeAuction[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2007,33(2):180-183.) [8] 李亚女,潘广贞,焦健,等.基于VORONOI图的无人机快速航迹规划研究[J].科学技术与工程,2014,14(19):142-147. (LiYanv,PanGuangzhen,JiaoJian,etal.RoutePlanningforUAVsBasedonImprovedVORONOIDiagram[J].ElectronicsOptics&Control, 2014,14(19):142-147.) [9] 叶媛媛,闵春平,沈林成,等.基于VORONOI图的无人机空域任务规划方法研究[J].系统仿真学报,2005,17(6):1353-1359. (YeYuanyuan,MinChunping,ShenLincheng,etal.VORONIODiagramBasedSpatialMissionPlanningforUAVs[J].ActaSimulataSystematicaSinica, 2005,17(6):1353-1359.) [10] 马传焱.多无人机飞行路径自动规划算法研究[J].无线电工程,2015, 45(2):5-7. (MaChuanyan.ResearchonAutoFlightPathPlanningAlgorithmofMultipleUnmannedAirVehicles[J].RadioEngineering,2015, 45(2):5-7.) [11] 蔡自兴,徐光佑.人工智能及其应用[M].北京:清华大学出版社, 2004.(CaiZixing,XuGuangyou.ArtificialIntelligenceandItsApplication[M].Beijing:TsinghuaUniversityPress, 2004.) [12] 夏洁,高金源.满足战场需求的实时飞行路径规划[J].北京航空航天大学学报,2004,30(2):95-99.(XiaJie,GaoJinyuan.Real-timgFlightPathPlanningforCombatMission[J].JournalofBeijingUniversityofAeronauticsandAstronautics, 2004,30(2):95-99.) Study on Coordinated Mission Planning Technology of Tactical Missile Liao Mo,Liu Yang,Mo Wenji,Su Bingwei Science and Technology on Space Physics Laboratory,Beijing 100076, China Coordinatedcombatmodesandkeytechnologiesbytacticalmissilesareanalyzedandcoordinatedmissionplanningtechnologyisfocusedspecially.A3-classmissilecoordinatedmissionplanningframeworkisproposed,andthekeyproblemandmaincontentsofcoordinatedmissionplanningtechnologyarestudiedandanalyzed.Modelandmethodfortargetassignmentandtrajectoryplanningareproposedandstudied.Atypicalcoordinatedmissionplanningcaseisproposedandsimulated. Multi-missilecoordination;Missionplanning;Targetassignment;Trajectoryplanning 2014-10-16 廖 沫(1978-),女,广西柳江人,博士,高级工程师,主要从事导弹总体设计;刘 洋(1982-),女,天津人,硕士,高级工程师,主要从事弹道设计;莫文骥(1981-),男,重庆万州人,博士,高级工程师,主要从事武器系统总体设计;苏丙未(1976-),男,辽宁义县人,博士,研究员,主要从事导弹总体设计。 TP316.2;V19 A 1006-3242(2016)04-0070-06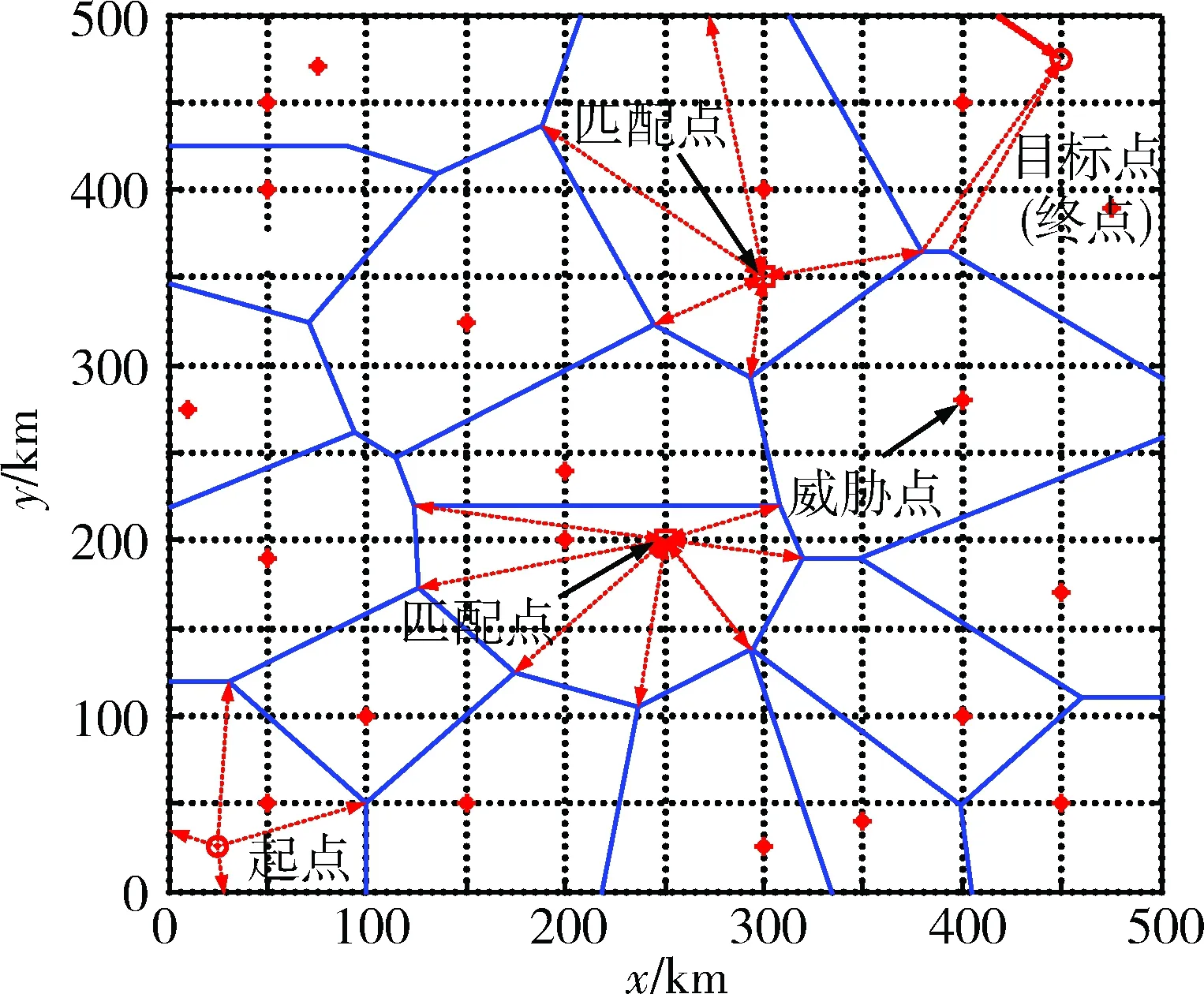



3 仿真实例




4 结束语