偏振导航传感器设计与标定
2016-07-20江云秋宋一铂
江云秋 宋一铂
1. 宇航智能控制技术国家级重点实验室,北京100854 2. 北京航天自动控制研究所,北京100854
偏振导航传感器设计与标定
江云秋1,2宋一铂1,2
1. 宇航智能控制技术国家级重点实验室,北京100854 2. 北京航天自动控制研究所,北京100854

借鉴了生物偏振导航的研究成果,构建了偏振导航传感器的模型,分析了该模型测量原理,设计了偏振导航传感器,研制了偏振光轴标定系统,提高了传感器的测量精度,建立了传感器性能测试系统,传感器的测量误差优于0.18°,研究成果对偏振导航传感器的应用具有指导意义。
仿生;偏振;导航;传感器
偏振光导航技术源于沙蚁等昆虫的偏振视觉导航原理[1]。太阳光经过大气发生散射现象[2],散射辐射具有偏振特性,偏振光携带方向信息,沙蚁等昆虫正是利用天空偏振光提供的方向信息进行导航的[3]。
偏振导航传感器具有体积小、重量轻及成本低等优势,作为新型的惯性辅助测量装置,有利于提高惯性系统的测量精度,同时又不会增加体积、重量上的负担,具有广阔的应用前景[4-5]。
依据沙蚁偏振光导航定位原理,建立仿沙蚁复眼结构的偏振光测角模型,以此为基础研制了偏振导航传感器,通过光轴标定系统准确确定偏振片之间的相对位置,提高了传感器的精度。在标准测试条件下测试,偏振导航传感器测角精度优于0.18°。
1 传感器设计原理
沙蚁能利用天空中的偏振光进行导航定位是因为它的视觉系统能够敏感偏振方向[6],这个神经系统分为视网膜层和神经中枢层,前者对偏振光的强度和方向分布模式进行感知,后者对其信息进行综合处理。沙蚁的视网膜由数百个面向不同方向的视神经感杆组成,每个感杆由8个互相交叉垂直的单向感光器组成,这一结构使每个感杆对特定方向偏振光的刺激响应为正弦曲线,是一个严格的方向分析器,在沙蚁体轴与太阳子午线的夹角为0°、60°和120°时达到最大响应值。视神经叶部分的中间神经元分为3种类型,接受视网膜上最大敏感方向互相垂直的视神经感杆输入,中间神经元的响应结果作为输入汇合到沙蚁脑部的罗盘神经元,经过计算和译码得出沙蚁体轴与太阳子午线的夹角,实现其导航功能[7]。
本文构建的偏振导航传感器如图1所示,该传感器由3个通道组成,每个通道中180°方向上的2个偏振单元光轴垂直。其中,Ⅰ通道偏振光轴为0°方向,Ⅱ,Ⅲ通道偏振光轴方向为60°和120°,这样就构成了3个偏振方向分析仪(0°,60°和120°)。通过解算3个偏振方向分析仪获取的信息,得到偏振方位角,为导航系统提供角度信息。
单通道系统组成如图2所示,天空中的偏振光经滤光后得到蓝光,偏振片作为检偏器使用,透过偏振片的光经过光电二极管S1087转化为电流信号,每个通道中的2路电流信号送入对数放大器LOG101的2个输入端,完成对数运算后变成电压信号,经A/D转换芯片,送入CPU进行偏振方位角的解算。
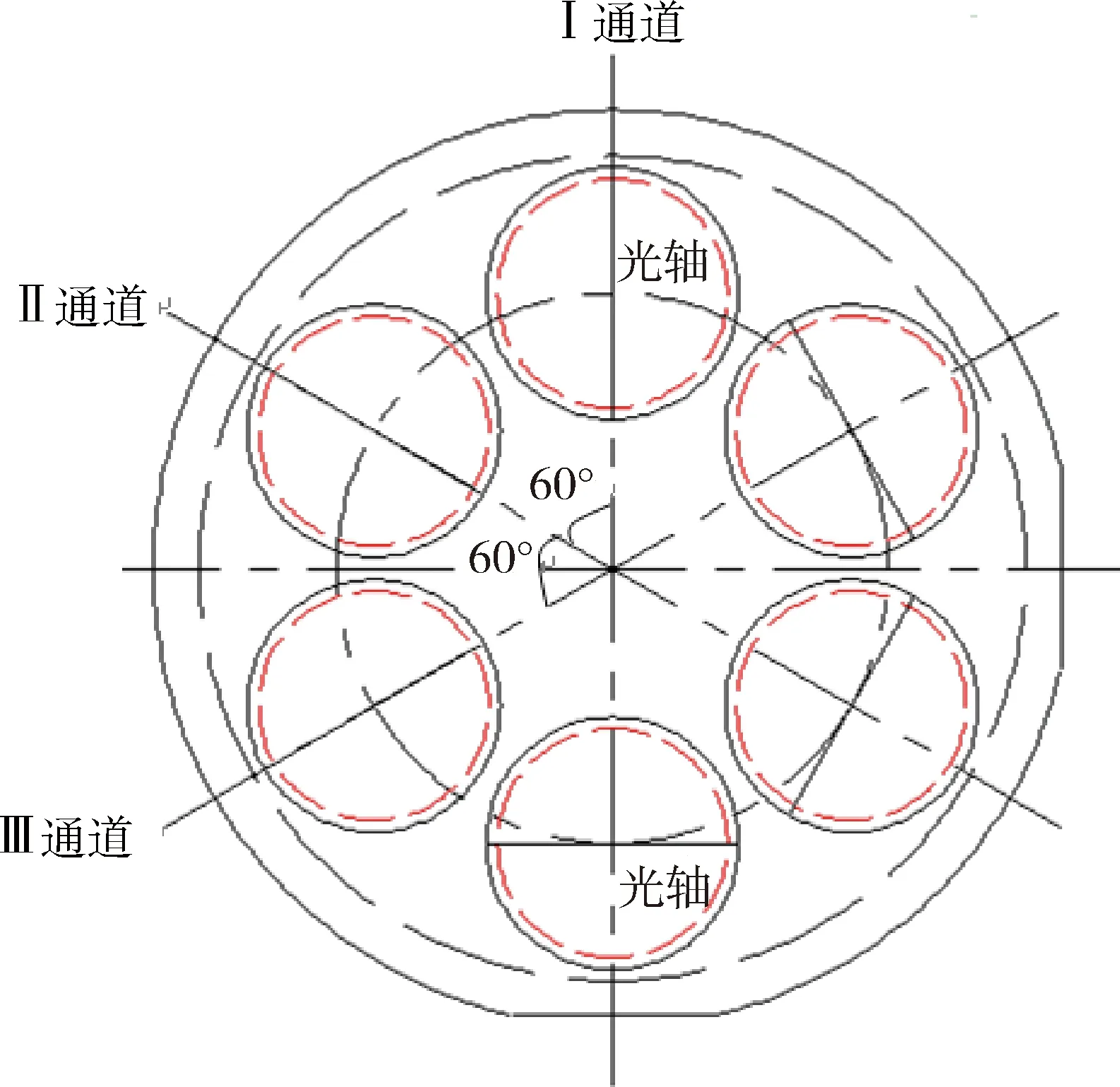
图1 偏振导航传感器原理图
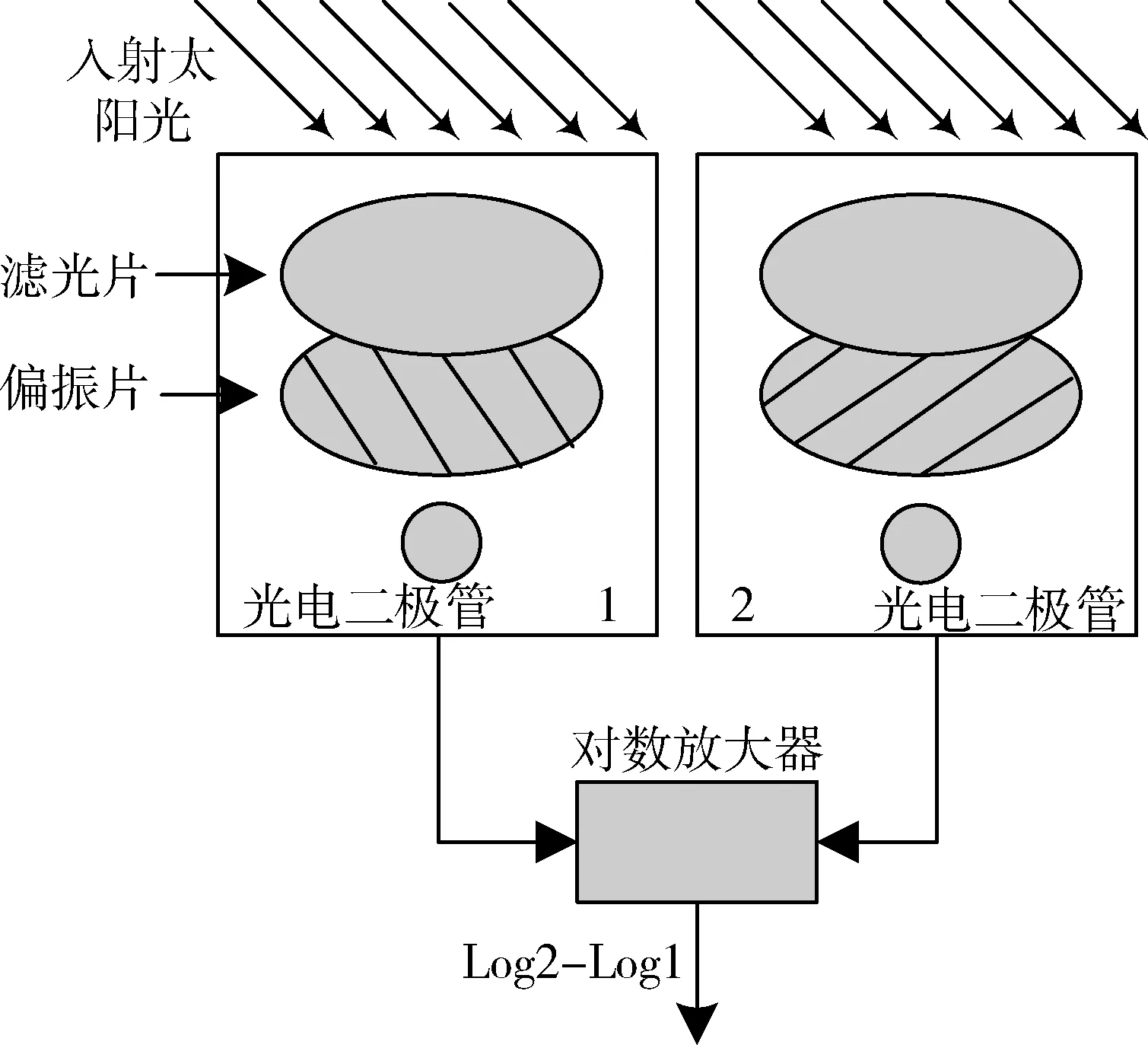
图2 单通道系统组成示意图
每个通道中偏振单元的输出可描述为
S(Φ)=KI[1+dcos(2Φ-2Φmax)]
(1)
式中,I是光强;K是放大倍数;d是偏振光的偏振度;Ф是相对于太阳子午线目前的朝向,即偏振方位角;Фmax是使S(Ф)取得最大值的方向。经光电转换及对数放大器后,3个通道的输出为
(2)
(3)
(4)
(5)
(6)
(7)
上述3个方程中含有2个未知数,选择其中任意2个均能解算出偏振方位角。取其中2个方程经计算得到偏振方位角Ф为
(8)
2 偏振光轴标定系统
在偏振导航传感器的设计中,光学系统是其中的重要组成部分,由图1可知,3个通道共需6个偏振片,它们的光轴之间有严格的位置要求,是影响传感器测量精度的一个重要因素,为了保证这6个偏振片之间的位置精度,设计了一套偏振光轴标定系统。
偏振光轴标定系统依据马吕斯定率I=I0cos2θ设计,其中I0为入射偏振光的强度,I为透过检偏器的透射光强,θ为入射偏振光偏振方向与检偏器偏振方向之间的夹角。偏振光轴标定系统由3部分组成:1)激光器发出的光经起偏器起偏后产生高精度偏振光;2)偏振光轴调节部分,将被测偏振片放置在精密旋转机构上,偏振片做为检偏器使用;3)功率监测部分,在调节偏振片光轴方向时监测输出的光功率,从而找到偏振片光轴的最佳位置。其原理图如图3所示。
起偏器和精密旋转机构是偏振光轴标定系统的2个重要组成部分。为了提高偏振片光轴间的位置精度,必须有1个高精度起偏器,用以产生高精度的偏振光,作为标定基准。如果选用一般的薄膜偏振片作为起偏器,其消光比为1∶500,相当于偏振光方向误差2.56°,远远达不到设计要求,采用目前国内最好的α-BBO晶体作为起偏器,它的消光比为5×10-6,相当于偏振光方向误差0.13°,满足设计要求。精密旋转机构主要由分度盘和游标盘组成,机械精度主要取决于刻度-游标系统,机械系统加工精度为5μ,游标刻线精度为1′,保证了系统测量精度要求。
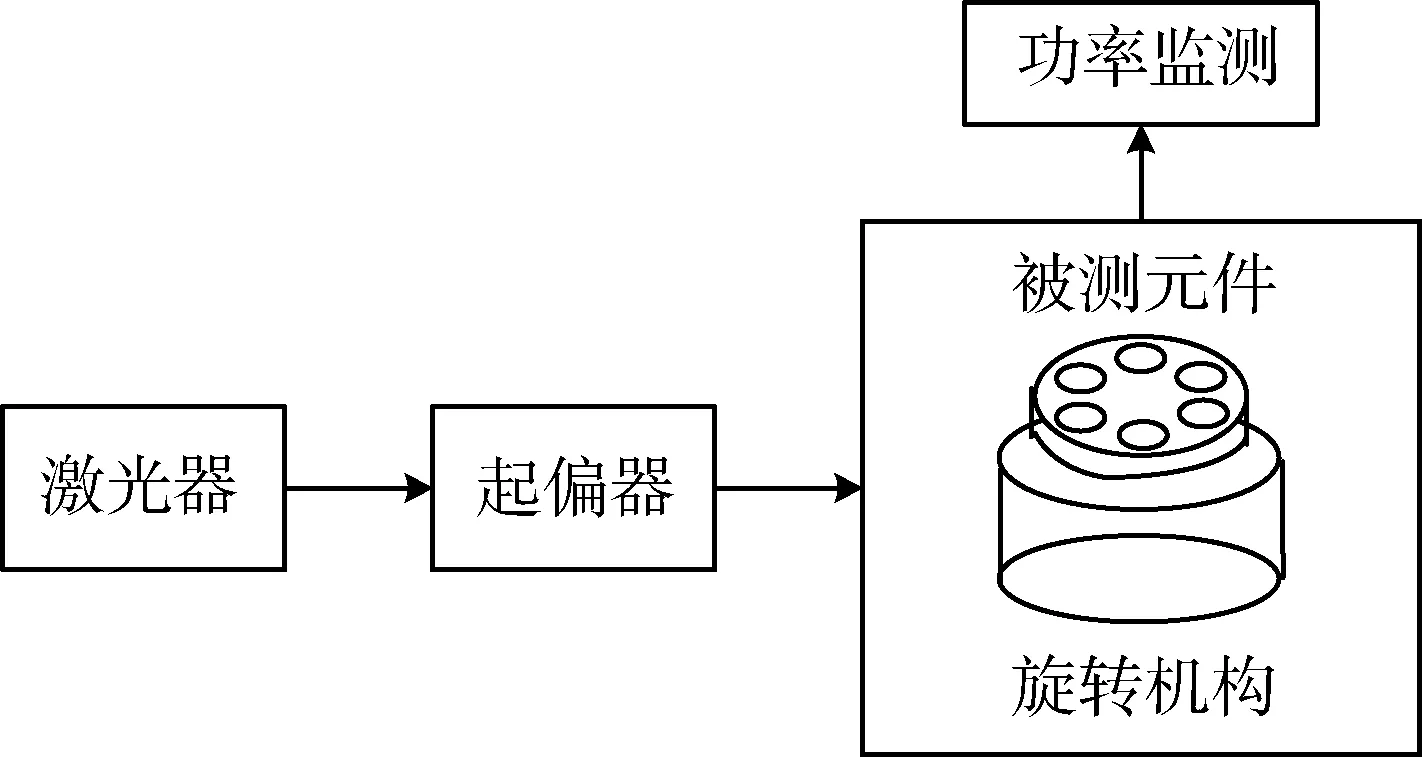
图3 偏振光轴标定系统原理图
利用偏振光轴标定系统,提高了传感器各偏振片光轴之间的位置精度,偏振光轴的位置精度优于0.16°。
3 传感器性能测试
为了测试传感器的性能,研制了偏振导航传感器测试系统,如图4所示。主要由电源、卤钨灯、光学积分球、高精度旋转台和偏振片组成。
电源驱动卤钨灯产生的光线在积分球内部被均匀地反射及漫射,在球面上形成均匀的光强分布,得到非常均匀的漫射光。在积分球出口的正前方放置1个高精度旋转平台,旋转平台上方固定1个线性偏振片,将均匀的漫射光变成高精度线偏振光,由于高精度旋转台可以带动偏振片精密转动,因此可以按照使用要求改变偏振光的偏振方向。积分球配有3个内部卤钨灯和1个外部卤钨灯,每个可单独点亮,光亮度从0~18000cd/m2连续可调,光功率稳定性优于99%;偏振片的消光比为1:10000;高精度旋转台的分辨率为15′′,重复定位精度为1′。此外,为方便控制积分球与被测传感器之间的相对位置关系,支架可以做上下、左右和前后三维运动。
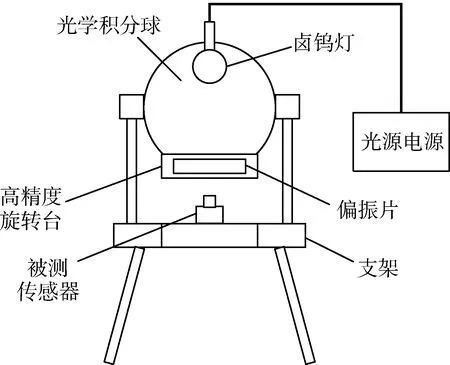
图4 偏振导航传感器测试系统原理图
将传感器置于积分球出口处的正下方,当入射到传感器的偏振光偏振方向发生变化时,传感器测量的偏振方位角也相应的发生变化,以此模拟太阳光发出的偏振光偏振方向变化情况。依据这一原理,制定了测试方法。通过控制高精度旋转台,在0°~180°范围内以1°间隔改变光源输出偏振光的偏振方向,在每一个测试点记录传感器的测量结果,理论上相邻2个测量值之差为1°,因此通过比较相邻2个测量值与1°的偏差,评价该传感器的性能。测试结果如图5所示,从图中可以看出偏振光偏振方向在0°~180°范围内变化时,传感器测量误差优于0.18°。
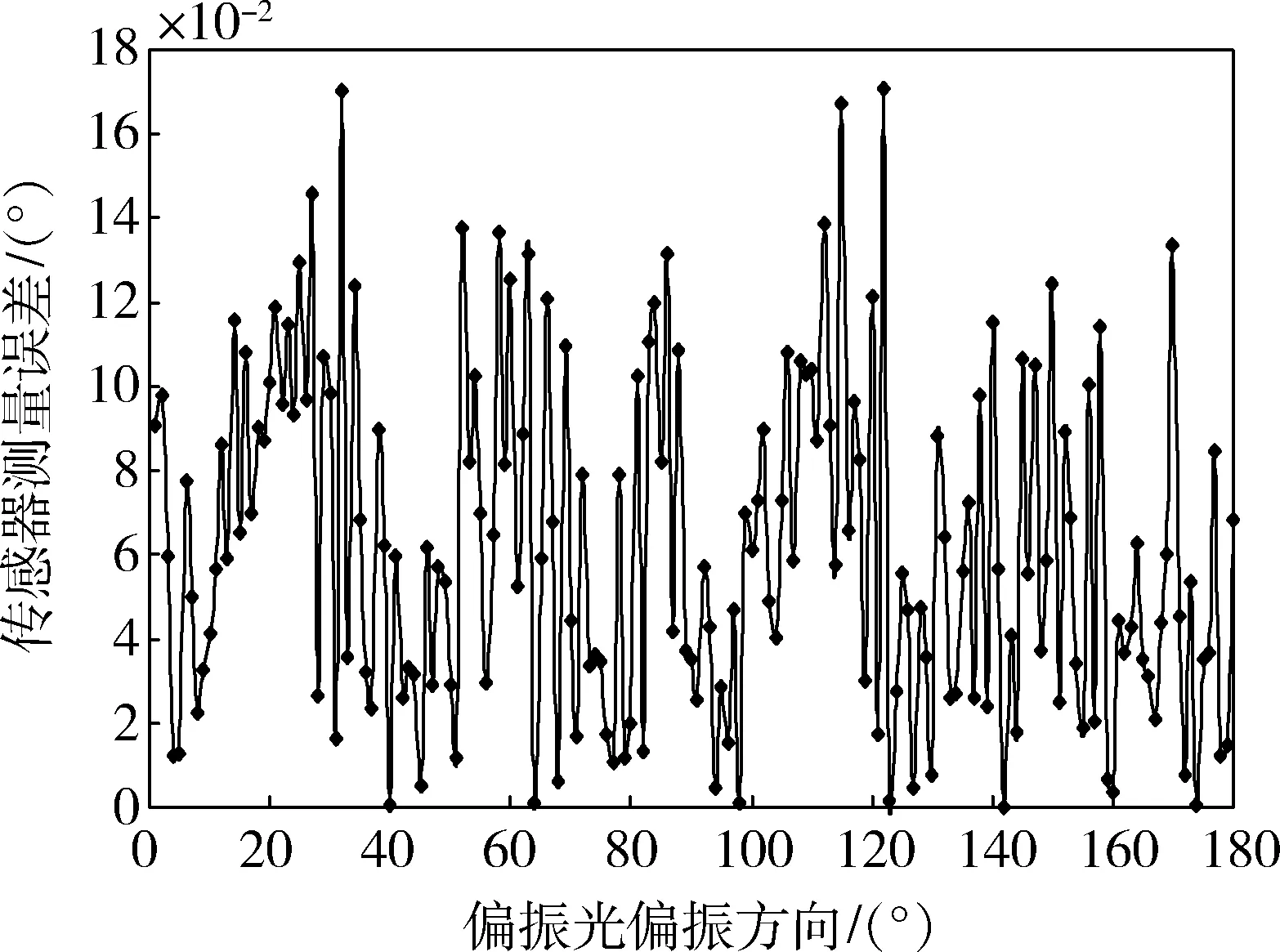
图5 传感器测量误差曲线图
4 结束语
依据仿生原理设计了偏振导航传感器,为了保证偏振片的位置精度,研制了偏振光轴标定系统,利用该系统显著提高了偏振光轴间的位置精度,偏振光轴的位置精度优于0.16°。构建了偏振导航传感器测试系统,利用此系统对传感器的性能进行了综合测试,传感器测量误差优于0.18°。
[1]MullerM,WehnerR.PathIntegrationinDesertAntsCataglyphisFortis[C].Proc.Natl.Acad.Sci.USA, 1998, 85:5287-5290.
[2]MatchkoRM,GerhartGR.PolarizationAzimuthAngleinDaylightScenes[J].OpticalEngineering, 2005,44
(2):11-19.
[3]LambrinosD,MillerR,LabhartT,etal.AMobileRobotEmployInsectStrategiesforNavigation[J].RoboticsandAutonomousSystems, 2000, 30(1):39-64.
[4] 卢鸿谦. 偏振光定姿及其在导航中的应用[D]. 哈尔滨:哈尔滨工业大学硕士论文,2009,6.(LuHongqian.PolarizedLightAttitudeDeterminationinNavigationSystem[D].Harbin:DissertationfortheDegreeofHarbinInstituteofTechnology,2009,6.)
[5] 范之国,高隽,潘登凯,崔帅. 利用偏振光、地磁、GPS进行多信息源融合导航方法的研究与实现[J].武汉大学学报,2011,34(11):1324-1327.(FanZhiguo,GaoJun,PanDengkai,CuiShuai.StudyandImplementationoftheBPNS/GPS/GNSMultipleInformationFusionNavigationMethod[J].JournalofWuhanUniversity, 2011,34(11):1324~1327.)
[6]LabhartT.PolarizationOpponentInterneronsintheInsectVisualSystem[J].Nature1988, 331: 435-437.
[7]WehnerR,GallizziK,FreiC,etal.CalibrationProcessesinDesertAntNavigation:VectorCoursesandSystematicSearch[J].J.Comp.Physiol.A.2002,188:683:689.
Design and Calibration for Polarization Navigation Sensor
Jiang Yunqiu1,2, Song Yibo1,2
1. National Key Laboratory of Science and Technology on Aerospace Intelligence Control,Beijing 100854,China 2. Beijing Aerospace Automatic Control Institute, Beijing 100854, China
Basedonbiologicalnavigationprinciplebyusingpolarizationlight,themodelofpolarizationnavigationsensorisestablished,andthemeasurementprincipleofmodelisanalyzeddetailedlyinthispaper.Thepolarizationnavigationsensorisdesigned,calibrationsystemofpolarizationlightaxesisestablishedandprecisionofmeasureisimproved.Thetestsystemofsensorisbuilt,andthemeasurederrrorofsensorisexcelled0.18degree.Theseconclusionsaredrawnaspowerfulsupportforfurtherapplicationpolarizationnavigationsensor.
Bionics;Polarize;Navigation;Sensor
2016-06-01
江云秋(1977-),女,黑龙江人,硕士研究生,工程师,主要从事光电系统研究。宋一铂(1984),男,湖北襄阳人,工程师,主要从事系统集成技术研究。
TP212.9
A
1006-3242(2016)06-0022-04
