基于改进型虚拟拖车链模型的车辆跟踪算法
2016-07-20徐晓光马平华夏雯娟
陆 涛,徐晓光,马平华,夏雯娟
(安徽工程大学检测技术与自动化装置重点实验室,安徽芜湖 241000)
基于改进型虚拟拖车链模型的车辆跟踪算法
陆 涛,徐晓光∗,马平华,夏雯娟
(安徽工程大学检测技术与自动化装置重点实验室,安徽芜湖 241000)
摘要:车辆跟踪在缓解交通拥堵和减少交通事故中发挥着积极作用.如何使得后车能够平滑地靠近,并且具备良好的收敛速度,是车辆跟踪需要解决的两个重要问题.提出了一种改进型虚拟拖车链模型,运用Matlab仿真软件将改进型虚拟拖车链模型应用到车辆跟踪算法中,最终使得后车可以准确平稳地到达指定位置.研究结果为进一步开展车辆跟踪算法的研究奠定基础.
关 键 词:改进型虚拟拖车链模型;车辆跟踪;平滑运动;Matlab仿真
1 车辆跟踪算法
车辆跟踪过程中存在两种误差,即跟踪算法自身局限性导致误差的产生和跟踪算法的时延性导致误差产生.随着智能交通和跟踪算法的不断发展,Teck Chew提出了“虚拟拖车链模型”的概念.Teck Chew的模拟拖车结构采用两根虚杆相连的方式,假设前车的后面拖着一个虚拟的两节铰接的拖车杆,杆与杆之间是随动的,后车不直接跟踪前车,而采取跟随前车后方的一个点的方式来跟踪前车轨迹,虚拟拖杆模型的引入使得后车可较好地跟踪前车轨迹,但是,由于此模型算法依然存在缺陷,导致车辆在转弯的过程中存在较大误差[1-2].近几年,陈伟海[3-6]等又提出了一种基于柔性曲杆的车辆跟踪算法,该算法理论上可以更好地拟合前车的轨迹,进而使后车更准确地复现前车轨迹.然而实际情况是,该结构的曲杆应尽可能地与前车的轨迹相吻合,但此算法用短圆弧代替前车轨迹,在短圆弧的相交处会发生转角突变,无法保证车辆行驶的平稳性.
2 改进型虚拟拖车链模型设计
针对上述两种方法的优点和缺点,采取了改进型虚拟拖车链模型如图1所示.由图1可知,该模型既不是简单的跟踪前车,也不是通过复杂的拟合过程来跟踪前车的路径,而是将前车的轨迹用一个一个历史点进行描述,跟踪前车的某个历史点.基于该模型的算法不仅简单、容易实现,而且跟踪精度相较原来的两种跟踪算法又有了进一步提高,同时后车的运行平稳性也能得到保证.改进型虚拟拖车链模型不再以前车的末端为随动杆的另一个节点,而是以前车的某个历史点为跟踪点.在跟踪点和后车之间由于两个节点之间距离比较近,延续前人的做法,用虚拟的两节铰接的拖车杆连接,采用这种改进型虚拟拖车链模型可以大大减小误差.基于改进型虚拟拖车链模型的车辆跟踪算法不仅考虑到后车的轨迹,而且将车辆所要到达目标点的速度、航向角一并考虑在内,可以降低后车出现点头及震动(即速度、方向发生突变)的情况.
为了提高车辆跟踪的精度,首先需要准确而实时地获取前车的运动轨迹点.前车、后车坐标示意图如图2所示.由图2可知,以后车的初始位置为坐标原点(0,0),初始方向为X轴建立全局坐标系XOY.t时刻后车坐标为(xf,yf,θf),通过双目测距仪.FPGA等设备可以得到前车在以后车为原点的坐标系中的坐标为(at,bt),偏转角为θt,则可计算出前车在t时刻在全局坐标系下的坐标为(xl,yl).

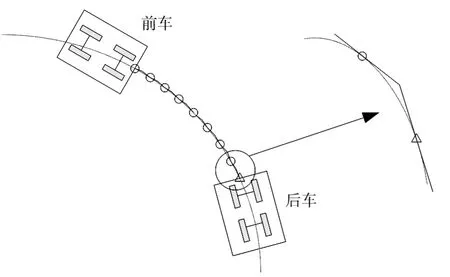
图1 改进型虚拟拖车链模型

图2 前车、后车坐标示意图
将前车的位置集合M表示为:

集合M中:

式中,x,y分别表示前车在全局坐标系下的横坐标和纵坐标;θ表示前车在该点的运动方向.
将前车的位置集合储存在一个队列中,如图3所示.由图3可知,在每个采样周期中,通过测量、计算得到前车在全局的坐标,从而移除最旧的坐标,将最新的坐标添加进来.
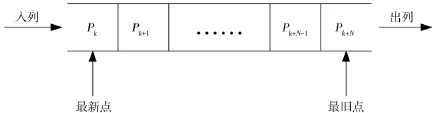
图3 前车位置集合示意图
3 仿真分析
为了检测该算法的有效性,利用Matlab程序进行了仿真验证.给定圆形轨迹改进前、后仿真效果图如图4、图5所示.为了比较改进前后后车的跟踪效果,将其局部放大如图6、图7所示.前车做椭圆轨迹运动,后车进行跟踪的仿真结果图如图8~图11所示.
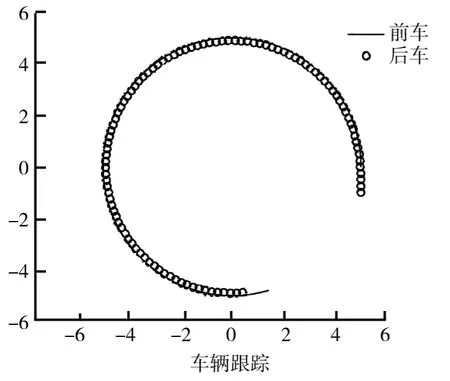
图4 给定圆形轨迹改进前仿真效果图
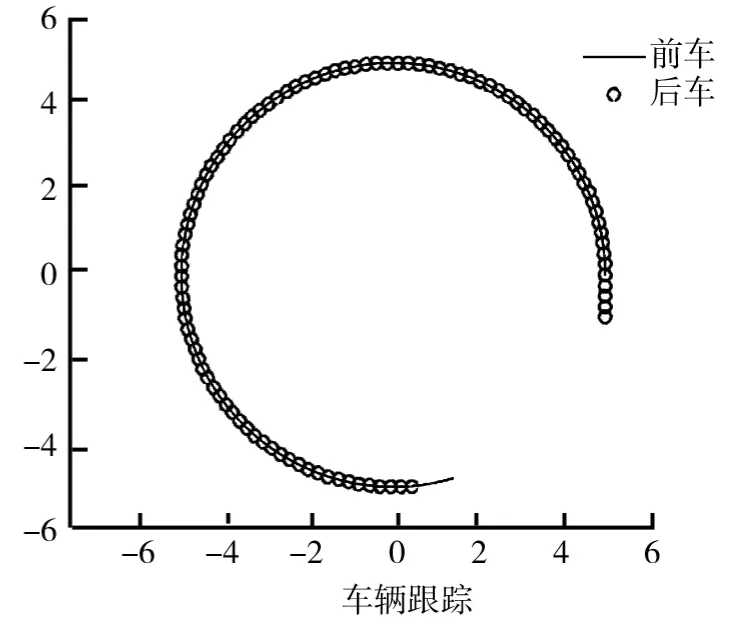
图5 给定圆形轨迹改进后仿真效果图
最后给定前车一个复杂的路径,给定前车的轨迹为:

仿真中,前车的初始位置设置为(0,0),后车的初始位置设置为(-1,0),初始方向角相同.因此,在前车发生转弯时,后车不应该立即转弯,而是直线行驶到前车转的地方,再进行转弯.使用虚拟拖车链模型和改进型虚拟拖车链模型的跟踪结果仿真图如图12、图13所示.将小车转弯部分的仿真图放大以后如
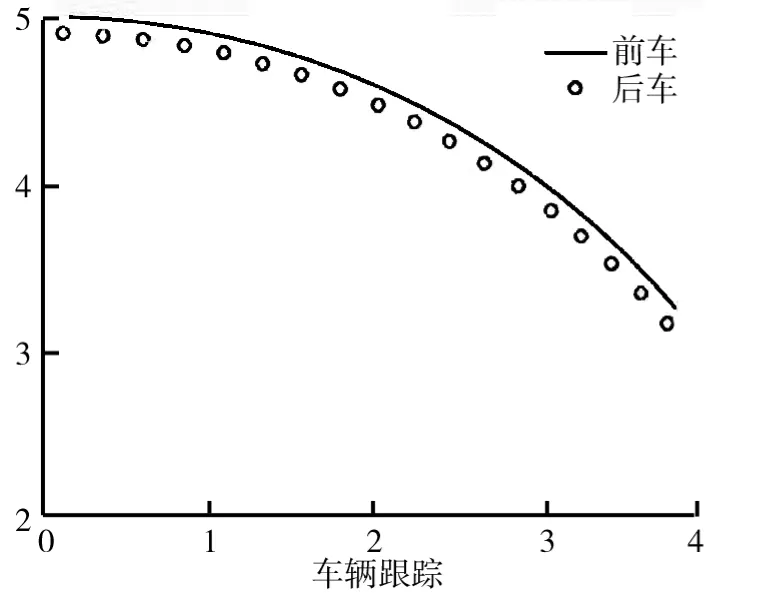
图6 给定圆形轨迹改进前仿真局部放大图
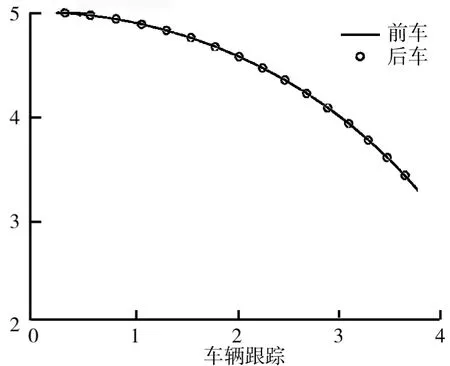
图7 给定圆形轨迹改进后仿真局部放大图

图8 给定椭圆形轨迹改进前仿真效果图
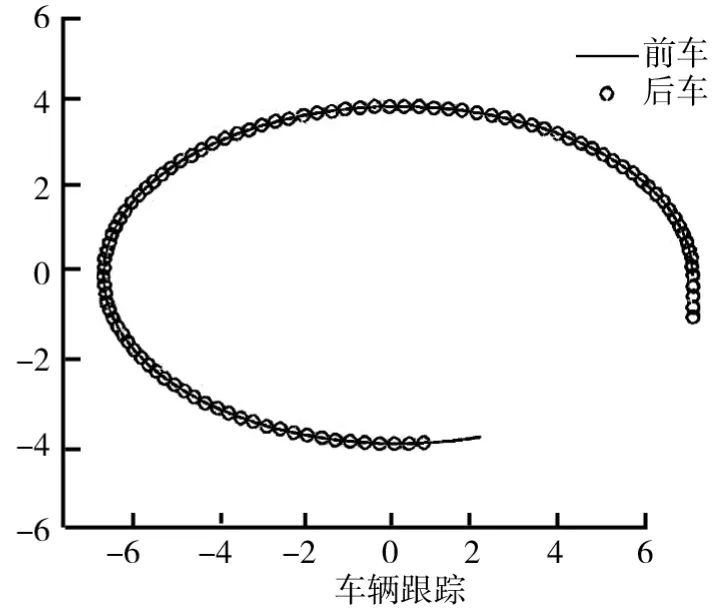
图9 给定椭圆形轨迹改进后仿真效果图

图10 给定椭圆形轨迹改进前仿真局部放大图

图11 给定椭圆形轨迹改进后仿真局部放大图
图14、图15所示.由图14、图15可知,原先的算法在车辆进行转弯的过程中会有较大的误差,而改进后的前后车轨迹图误差始终非常小,即使在转弯角非常大的情况下后车的运动轨迹依然可以很好地与前车的轨迹吻合.由此可知,改进的模型可以有效应对现实中车辆跟踪会遇到的各种情况.

图12 给定复杂路径改进前仿真图

图13 给定复杂路径改进后仿真图
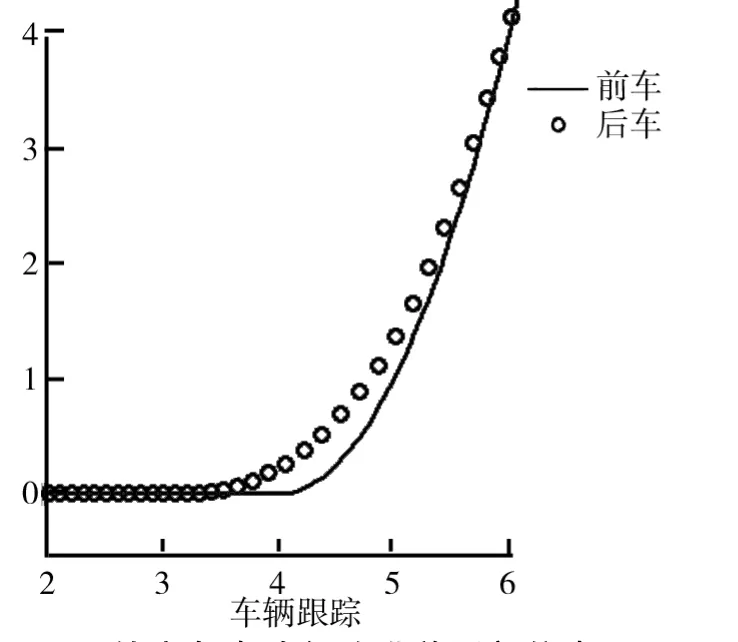
图14 给定复杂路径改进前局部仿真图

图15 给定复杂路径改进后局部仿真图
4 结论
经过理论分析和仿真验证,改进型虚拟拖车链模型具有以下特点:把跟踪前车转化为跟踪前车的某个历史点,短距离的跟踪可以确保跟踪更加准确;跟踪时,不仅考虑前车的位置,而且考虑到前车的速度、方向,确保后车在跟踪过程中更加平稳、平滑.仿真结果证明了基于改进型虚拟拖车链模型的跟踪算法的优越性,能够确保后车实时且高精度地跟踪前车的运动过程,与原先的虚拟拖车链模型相比,跟踪精度有了很大地提高.由于该模型是在理想情况下进行仿真实验的,在实际应用中还需要考虑很多问题,如避障、急刹等.这些问题有待后续研究完善.
参考文献:
[1] 夏文娟,徐晓光,陆涛,等.基于迭代控制的两自由度移动小车路径跟踪控制[J].洛阳师范学院报,2015,5(34):37-39.
[2] Teck Chew Ng.Bayesian estimation of follower and leader vehicle poses with a virtual trailer link model[J].International Journal of Robotics Research,2008,27(1):91-106.
[3] 陈伟海,张晓媚,吕章刚,等.适用于独立式车辆自动跟踪的力延时柔性虚杆建模[J].机器人,2011,33(5):599-605.
[4] 张晓媚,陈伟海,刘敬猛,等.基于柔性曲杆的车辆跟踪算法设计与实现[J].北京航空航天大学学报,2011,37(7):789-794.
[5] 戴冠雄,陈伟海,吕章刚,等.改进的车辆跟踪虚杆模型算法及仿真[J].哈尔滨工程大学学报,2013,11(34):1 391-1 396.
[6] C C Zhao,W H Chen,G X Dai,et al.A partially flexible virtual trailer link model for vehicle-following systems[J].Transactions of the Institute of Measurement and Control,2014(37):273-281.
Vehicle tracking algorithm based on improved virtual trailer chains model
LU Tao,XU Xiao-guang∗,MA Ping-hua,XIA Wen-juan
(Anhui Key Laboratory of Detetion Technology and Energy Saving Devices, Anhui Polytechnic University,Wuhu 241000,China)
Abstract:Vehicle tracking plays a very positive role in alleviating traffic congestion and reducing traffic accidents.More and more researchers focuse their attentions on vehicle tracking.There are two important problems to be solved in vehicle tracking.One is how to make the car approaching smoothly.And the other is how to make the convergence faster.This article presents an improved virtual trailer chain model.At last,this article uses Matlab and the algorithm based on the improved virtual trailer chain model for simulation.The result is that the tracking car can reach the designated position accurately and smoothly.The research results lay the foundation for the further research of the vehicle tracking algorithm.
Key words:improved virtual trailer chain model;vehicle tracking;smooth motion;Matlab simulation
中图分类号:TP13
文献标识码:A
收稿日期:2015-10-15
基金项目:安徽省高校省级自然科学研究基金资助项目(KJ2014A024)
作者简介:陆 涛(1991-),男,江苏南通人,硕士研究生.
通讯作者:徐晓光(1972-),男,安徽明光人,副教授,硕导.
