底横轴翻转式钢闸门开度的高程测量与自动控制
2016-07-16周依风
周依风
底横轴翻转式钢闸门开度的高程测量与自动控制
周依风
摘要通过对底横轴翻转式钢闸门开度的高程测量与自动控制方法的研究,导出了拉绳位移传感器和角位移传感器与闸门高程的函数关系,介绍了拉绳位移传感器测量值与高程换算的PLC程度设计方法。
关键词底横轴翻转式闸门拉绳位移传感器开度测量
底横轴翻转式钢闸门是一种新型的液压驱动式闸门。由于其结构紧凑、启闭灵活、开度可调、设备隐蔽、景观优美等特点,因而近年来在水利工程中得到了广泛的应用。
底横轴翻转式钢闸门通过开度的控制,可以实现无级调节溢过闸门顶部的过水流量。就闸门的操作而言,闸门的开度控制理应以高程来度量。然而,目前由于缺少能直接测量闸门顶部高程的有效方法,现有的底横轴翻转式钢闸门控制系统通常通过拉绳位移传感器测量启闭机油缸活塞杆行程来间接显示闸门的开度。而拉绳位移传感器的信号输出与闸门顶部的高程呈非线性函数关系,换算比较复杂。因此,闸门开度的高程通常仍借助水尺人工控制,操作极为不便,且很难实现远程控制。
本文就底横轴翻转式钢闸门开度高程的测量与自动控制方法进行研究,根据其启闭机械模型分析,导出拉绳位移传感器和角位移传感器与闸门高程的函数关系;介绍拉绳位移传感器测量值与高程换算的PLC(可编程序控制器)程序设计方法,以供相关技术人员参考。
1 底横轴翻转式钢闸门开度高程的测量
底横轴翻转式钢闸门主要由门体,固定在门体底部的底横轴、曲柄拐臂、液压驱动装置以及液压锁定装置等组成。其启闭机械结构如图1所示。O点为底横轴旋转中心,A点为油缸支点和摆动中心,B点为油缸活塞杆最大行程位置,也是闸门全关时拐臂的位置,C点为油缸活塞杆最小行程位置,也是闸门全开时拐臂的位置。BC之间的弧为活塞杆顶端运行轨迹,EF之间的弧为闸门顶部运行轨迹。

图1 底横轴翻转式钢闸门启闭机结构图
底横轴翻转式钢闸门开度的高程测量目前有两种比较实用的间接测量方法,一是采用拉绳位移传感器测量液压启闭机油缸活塞杆行程。二是采用角位移传感器测量底横轴旋转角度。拉绳位移传感器测量方式计算闸门高程较为复杂,但安装方便、结构直观;因此,目前被广泛采用。角位移传感器测量方式较为直接,计算开度的高程相对简单,但安装困难、安装精度要求高,实际应用极少。这两种传感器的测量值均需经过适当的换算后获得闸门顶部高程。
1.1拉绳位移传感器测量值与闸门高程函数的推导
如图2所示,h为闸门某一开度的高程(设底横轴旋转中心O点的高程为0);H为闸门高度;Ha为门体不包括半圆型门顶的高度;δ为门体的厚度;R为启闭机拐臂旋转半径;A为油缸摆动中心至拐臂旋转中心的距离;L为油缸缸筒的长度;ΔL为油缸活塞杆的行程;θ为拐臂及门体旋转角度;1为闸门水平位置时拐臂的位置;2为闸门高程为h时拐臂的位置;3为闸门垂直位置时拐臂的位置;4为闸门的水平位置;5为闸门高程为h的位置;6为闸门垂直的位置;α为油缸支点P、底横轴旋转中心O与活塞杆最小行程1点之间的夹角。

图2 底横轴翻转式钢闸门高程计算示意图
当活塞杆由最小行程伸长至2位置时,拐臂由1点运行至2点,门体由4点运行至5点,旋转角度为θ。由图2可知
上式未考虑门体的厚度,如果计入门体的厚度,上式应修正为

由余弦定理可得
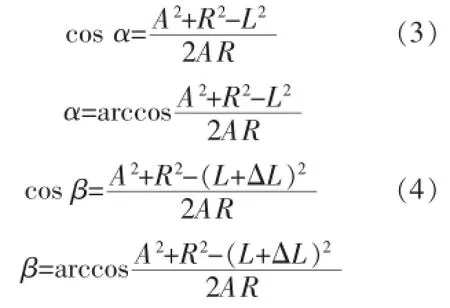
式中,A、R、L、δ、Ha为启闭机械设计时确定的已知量,通过式(3)可算得α角度值。式(4)中ΔL为活塞杆行程伸长量,为一变量,测出ΔL,就可算得β角度值,再由式(2)算得门体的高程。
1.2角位移传感器测量值与闸门高程函数的推导采用角位移传感器测量闸门高程时,角位移传感器测量值与闸门高程的函数由下式计算。

式中θ——角位移传感器测量值,其余符号同上。
2 底横轴翻转式闸门开度的自动控制
根据底横轴翻转式钢闸门自动控制要求,启闭机的控制系统应能通过传感器测量闸门开度,并将其测量值换算成闸门高程,然后与闸门高程设定值相比较,将其偏差作为控制量,选择适当的控制算法,驱动启闭机运行,当闸门达到设定高程后自动停止运行。图3为控制原理框图。
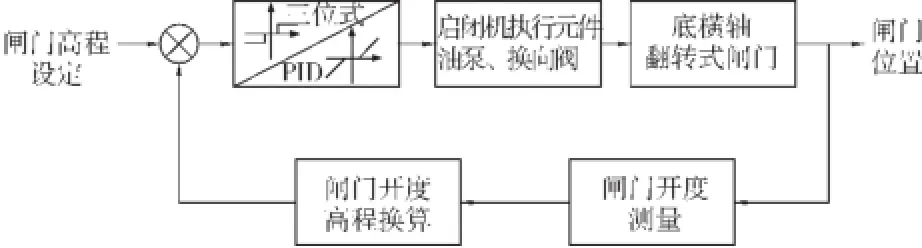
图3 底横轴翻转式钢闸门自动控制框图
就底横轴翻转式钢闸门启闭机控制系统而言,其执行元件为油泵、油缸的换向电磁阀。控制方式通常有两种,一是三位式控制方式;二是PID控制方式。
三位式控制算法根据闸门实测高程与给定高程的偏差进行位式运算,输出3个控制状态,即活塞杆外伸、活塞杆回缩、活塞杆维持原位。活塞杆伸缩速度不加以控制。控制算法比较简单,闸门位置控制精度较低。
PID控制算法则根据闸门实测高程与给定高程的偏差采用比例、积分、微分(PID)运算,输出控制量,除控制活塞杆的运行方向外,还通过调节缸筒的进油速度控制活塞杆的运动速度。调节缸筒进油速度通常有两种方式,一是对缸筒供油阀进行脉冲宽度调制(PWM)控制,二是对油泵进行变频控制,调节油泵的供油量。PID控制算法复杂,但闸门位置控制精度高。
3 闸门高程换算的PLC程序设计
由上述分析可知,不论采用哪一种控制方式,底横轴翻转式钢闸门控制系统的首要任务是完成由开度的相对测量值换算为闸门高程。PLC作为现场智能控制器件,由于可靠性高、运算能力强、结构紧凑,在底横轴翻转式钢闸门控制系统中已是常规配置。角位移传感器的高程运算比较简单,这里介绍拉绳位移传感器测量值与闸门高程换算的PLC程序设计方法。
3.1基于浮点运算指令的PLC程序设计
拉绳位移传感器测量值与闸门高程函数较为复杂,如式(2)、(3)、(4)所示。由于常见中小型PLC具有正弦函数运算指令而不具有反三角函数运算指令,因此,必须对式(2)进行适当的三角函数变换。
令M=cos α、N=cos β,由式(2)推导可得

通过上述三角函数变换,PLC不需要进行反三角函数的运算即可完成高程换算。在PLC程序设计中,完成上述的运算使用浮点运算指令更加方便。利用PLC的浮点数据转换、浮点数乘法、浮点数除法、浮点数平方根运算指令,不难完成式(7)、(8)、(6)运算的PLC程序设计。
3.2基于函数数值表检索运算的PLC程度设计
拉绳位移传感器测量值与闸门高程函数的PLC运算可采用函数数值表检索运算的方法。
由式(2)可得
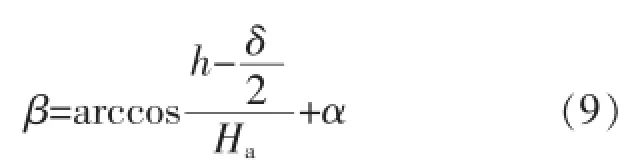
由余弦定理

利用式(9)、式(10),以高程h作为输入,活塞杆行程ΔL为输出,借助于EXCEL软件或其它计算工具,可很方便地建立如表1的活塞杆行程与闸门高程函数数值的对应关系。已知启闭机活塞杆行程就可获得闸门高程。
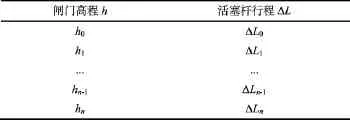
表1 闸门高程与启闭机活塞杆行程函数数值表
表1中h0>h1>...>hn、ΔL0>ΔL1>...>ΔLn(以图1为例)。
hn-1-hn为步距,通常可取5、10、20...等(取决于测量与控制精度要求)。
在PLC程序设计中,通过读取活塞杆行程测量值,利用PLC的区间比较指令检索闸门高程。表1的活塞杆行程计算值事先嵌入到PLC程序中。当测得的活塞杆行程值位于2个对应的高程值之间时,将高程的较小值作为高程测量值。
函数数值表检索运算的PLC程序结构简单、直观。但所用PLC的程序指令较多,且测量精度受制于步距的大小。以5 m高的闸门为例,如果步距取 20 mm (测量精度 20 mm,相对测量精度0.4%),则仅活塞杆行程换算为高程的比较指令需250条。步距越小,测量精度越高,程序指令越多,编程工作量越大。一般测量精度达到0.5%已可以满足实际使用要求。
建立活塞杆行程与闸门高程函数数值表还可以采用实测的方法。以点动步进的方式开启闸门,然后测量闸门高程,并读取相对应的活塞杆行程的测量值,运用插值法,获取活塞杆行程与闸门高程函数数值表。
4 底横轴翻转式钢闸门控制方式的讨论
底横轴翻转式钢闸门体形庞大、带水启闭、动作迟缓以及机械惯性等不利因素对高程控制精度的影响较大。特别是有可能出现在设定高程附近较小范围内不断开启与关闭,形成振荡。为避免此种情况发生,在PLC程序设计时,应设置闸门的动作死区。显然动作死区的设置必然影响闸门高程控制的精度。
闸门开启与关闭的运行速度对闸门高程控制精度同样影响较大。降低运行速度有利于提高闸门的控制精度,但受到闸门控制快速性要求限制。为提高闸门控制精度,尽可能采用较低的运行速度。
三位式控制算法由于对闸门的运行速度不加以控制,控制精度较低,采用改进的三位式控制算法可提高闸门的控制精度。如在设定高程附近一定的范围内,采用步进方式控制缸筒进油阀逐渐逼近设定值。
PID控制算法的闸门高程控制精度较高,但PLC程序设计复杂。采用缸筒供油阀PWM控制方式时供油阀动作频繁,因此,驱动电磁阀动作的元件应采用无触点开关。采用油泵电机变频控制时,PID控制算法是较好的控制方式,但控制系统中需配置变频器,设备投资大,运行环境要求高,且维护复杂。
5 结语
实现底横轴翻转式钢闸门开度高程的测量和自动控制,使操作人员能很方便地对闸门进行控制。尤其是在具有上位机的监控系统中,更是如此。此外,通过对流道上游水位的测量,运用水力计算公式,可获得底横轴翻转式钢闸门的过水流量,进而对其过水流量进行准确的控制,为水利工程(如水环境整治工程)的科学运行、合理调度提供有效的技术手段;因此,高程测量与自动控制是底横轴翻转式钢闸门控制系统不可缺的技术性能。
中图分类号TV663
文献标识码B
文章编号1007-6980(2016)01-0038-04
作者简介
周依风男高级工程师苏州市水利建设监理有限公司江苏苏州215100
收稿日期(2015-11-12)
