基于体感控制的智能车设计
2016-07-16陈玉敏孟宪民
陈玉敏,谢 玮,孟宪民
(1.哈尔滨工业大学(威海)信息学院,山东 威海 264209;2.山东卡尔电气股份有限公司,山东 威海 264209)
基于体感控制的智能车设计
陈玉敏1,谢玮1,孟宪民2
(1.哈尔滨工业大学(威海)信息学院,山东 威海264209;2.山东卡尔电气股份有限公司,山东 威海264209)
摘要:智能车设计中远程端及控制端采用单片机作为主控制器,远程端即小车端接收到控制端发送过来的控制信号,实现自身转向、姿态变换等动作,姿态传感器安装在人的手背上作为控制端,通过无线装置将相关参数传输到小车上的接收装置,接收器接收到相应参数后,处理器执行相应滤波算法,发送指令,从而实现远程遥控。设计中按照低功耗、高精度原则进行器件选型,主控制器部分、电机驱动等硬件电路设计力求经济性和精简性。软件设计充分发挥软件控制灵活方便的特点,实现了小车的平稳性和精确变换姿态等功能,所实现的智能车可应用于医疗、娱乐等各个领域。
关键词:体感控制;智能车;陀螺仪;无线传输
伴随汽车工业蓬勃发展,体感遥控车设计刚处于起步阶段,在电子设计的智能化领域中,应用单片机控制、远程遥控等各种技术[1⁃2]。体感控制小车即人们可以使用肢体动作直接控制远程端的小车做出各种姿态的变化。本设计中将遥控控制端安装在人的手背上,通过人手的姿态变化得到小车的姿态控制信号,最终实现小车的远程控制。增加使用者较高的用户体验,增强小车的实用性,在控制端安装了无线发射装置,在小车端安装了无线接收器。其设计思想可以应用在医疗、娱乐等领域,例如体感控制的轮椅和体感控制的游戏。
1 体感遥控智能车的整体设计方案
1.1体感遥控智能车实现功能
体感控制小车是对两轮自平衡车或者自平衡平台的一种延续和扩展应用。通过增加遥控控制端得到小车的控制信号,即将姿态采集器安装在手背上,为了减少控制端的体积和质量,设计无线控制模块传输参数。小车端可以实现独立行走,当接收到遥控端信号时实现自身相应的姿态变化。
1.2总体方案设计
根据需要设计的功能,控制端分为单片机、无线传输模块、姿态传感器;小车端分为测距模块、电机驱动模块、液晶显示模块及无线传输模块,系统模块图如图1所示。其中,直流电机的速度使用PWM方式控制,使用89C52的定时器1,它是16位定时器,通过定时输出周期变化的矩形波,加载矩形波到电机上,为了实现两个电机的无差速控制,需要对小车增加测量装置以实现闭环控制。
2 硬件结构
2.1单片机模块
本设计采用的主控制芯片为STC公司生产的嵌入式微处理器STC89C52RC单片机。STC89C52RC单片机是新一代高速、超强抗干扰、低功耗的单片机[3⁃4]。指令代码与传统STC8051单片机完全兼容,片上RAM有集成的512 B,工作电压为5 V,32个通用I/O口,可作为看门狗或E2PROM使用,使用中无需专用编程器或仿真器,应用串口直接下载用户程序,有3个16位定时器/计数器及4路外部中断,具有外部中断唤醒功能和低功耗,STC89C52RC单片机运行可靠性好、速度高、性价比高。

图1 系统模块图
2.2电机驱动模块
直流电机采用直流电机驱动芯片L298,驱动电流可达1.2 A,外围器件较简单。选用两个减速电机,通过PWM控制电机的转速,通过单片机输出高、低电平控制小车的前进、左转、右转、后退。P0.0与P0.1引脚控制A电机,P0.2与P0.3引脚控制B电机。电机驱动控制表如表1所示。

表1 电机驱动控制
2.3无线传输模块
无线传输模块使用NORDIC公司生产的nRF24L01[5⁃6]。其工作频段在2.4~2.5 GHz,可选择设置SPI接口进行控制,传输速率可为1 Mb/s或2 Mb/s,其正常工作兼容电平为3.3 V,由于本设计中单片机输出电平为5 V,为使无线模块正常传输,需要设计电压转化电路,如图2所示。
2.4超声波测距模块
超声波传感器通过发送一个超声波和提供一个对应于爆裂回声返回到传感器所需时间的输出脉冲来工作。程序流程如图3所示,整个系统由信号发生电路和信号接收电路组成。单片机发出40 kHz的信号后,超声波发射器输出接收到的放大信号,接收器接收到信号后,启动单片机程序测出传输时间,经过计算得到距离数传给显示器显示。
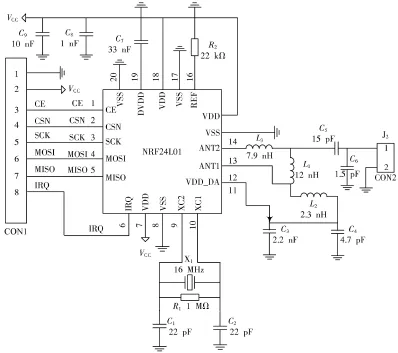
图2 nRF24L01模块电路原理图

图3 超声波程序流程图
2.5MPU6050模块
MPU6050整合了3轴陀螺仪、3轴加速度传感器等性能[7⁃8]。单片机与MPU6050进行数据交换时,采用I2C总线连接,其SCL和SDL两个引脚与单片机的I/O口直接相连,其模块原理图如图4所示。
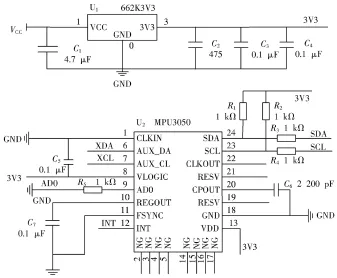
图4 MPU6050工作原理图
MPU6050数据处理中,加速度计、陀螺仪主要用来检测车体倾斜角和倾斜角的变化速度,在角度测量时,除了小车角度变化的信号外,还伴随着因车体运动而产生的噪声,这个噪声会随着车体运动速度的增大而增加。本系统中采用微控制器循环采样来获取陀螺仪的角速率信息,这样长时间的工作输出数据就会受到噪声干扰。为了获取车体倾角值的准确值,需要对加速度计和陀螺仪的输出进行融合,本设计采用卡尔曼滤波的方法进行数据融合,卡尔曼滤波是一种递归算法[9⁃10]。需要对K时刻车体的实际角度值估算。先根据K-1时刻角度预测值得到K时刻的角度值,再根据K时刻的预测角度值和高斯噪声的方差,进行递归运算,直到得到最优的遥控倾斜角度值。单片机通过I2C总线获得的数据不能直接作为控制信号使用,需要对得到的数据进行换算,以下为MPU6050姿态的变化坐标,如图5所示。
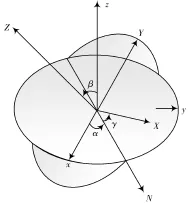
图5 传感器姿态坐标图
俯仰角α:水平面和传感器坐标系 X轴的夹角。当X轴正半轴在过坐标原点水平面上时,俯仰角为正,反之为负。
偏航角γ:传感器坐标系的X轴的水平投影与地面坐标系X轴(指向目标为正)之间的夹角,设由X轴逆时针至投影时的偏航角为正,即向右偏航为正,反之为负。
滚转角 β:传感器坐标系Z轴与通过机体x轴的铅垂面间的夹角。
分析后,对角速度积分得到倾斜角度:

采用卡尔曼滤波计算倾角:

进行互补滤波。补偿原理是取当前倾角和加速度获得倾角差值进行放大,然后与陀螺仪角速度叠加后再积分,从而使倾角跟踪为加速度获得的角度,设0.5为放大倍数,可调节补偿度;10 ms为系统周期;Angle=Angle+(((Angle_ax⁃Angle)*0.5+Gyro_y)*dt)。
3 智能车硬件组装与测试
3.1硬件组装
小车采用双电机驱动加万向轮结构,整体为三轮结构,小车整体重心偏后。小车的整体安装需要对小车的硬件布局进行合理规划,使得小车的中心在三个轮的中心线上,并且尽量靠后,避免小车在突然启停时前翻。通过多次修改调试,得到如图6所示的小车结构。遥控控制端采用手势姿态控制小车行驶,将其直接安装在手背上,如图7所示。
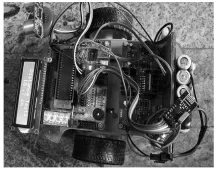
图6 智能车整体结构

图7 MPU6050安装示意
3.2系统测试
组装好小车和遥控器后,对其进行整体测试。手势与对应运行姿态见表2。单片机写入程序后,按照表2中的动作进行测试,小车能按照手势进行姿态的变化,动作准确。

表2 手势与小车姿态对照表
设置手势阈值:
4 结语
通过对体感控制进行研究,选择相关体感遥控器件和算法,设计了一款基于手势控制的体感遥控器,并通过无线传输模块对小车行驶进行控制。通过软硬件的设计,并对小车硬件结构进行合理化布局,所设计成品可以为相关课题提供实验基础,例如:自平衡台、两轮自平衡小车等平衡装置的设计,同时也可以将其应用到轮椅设计中,为人们带来更大的便利。
参考文献
[1]杨晓迪,廖昕,古丽米拉·克孜尔别克,等.基于ARM的智能家居控制系统设计[J].现代电子技术,2015,38(8):93⁃95.
[2]张鑫,徐文胜,刘阶萍,等.基于Kinect的智能花盆体感控制系统研究[J].机电工程,2014,31(9):1226⁃1230.
[3]吕云芳,陈帅帅,郝兴森,等.基于C51高级语言程序控制的智能循迹小车设计与实现[J].实验室研究与探索,2015,34(3):142⁃145.
[4]王永喜,胡玫.基于单片机的电磁控制运动系统[J].自动化与仪器仪表,2014(2):123⁃125.
[5]陈晖,张军国,李默涵,等.基于STC89C52和nRF24L01的智能小车设计[J].现代电子技术,2012,35(17):12⁃15.
[6]李贺,程祥,曾令国.基于nRF24L01芯片的近程无线通信系统设计[J].现代电子技术,2014,37(15):32⁃34.
[7]赖义汉,王凯.基于MPU6050的双轮平衡车控制系统设计[J].河南工程学院学报(自然科学版),2014,26(1):53⁃57.
[8]李战明,王晓萌.基于新型MEMS传感器的老年人跌倒检测系统设计[J].工业仪表与自动化装置,2014(4):52⁃55.
[9]张建军.基于改进的扩展卡尔曼滤波伺服系统建模技术研究[J].计算机应用研究,2012,29(3):944⁃946.
[10]高显忠,侯中喜,王波.四元数卡尔曼滤波组合导航算法性能分析[J].控制理论与应用,2013,30(2):171⁃176.
谢玮(1975—),男,讲师,系统分析师,博士。研究方向为控制科学与工程。
中图分类号:TN710⁃34
文献标识码:A
文章编号:1004⁃373X(2016)03⁃0155⁃04
doi:10.16652/j.issn.1004⁃373x.2016.03.040
收稿日期:2015⁃07⁃12
基金项目:哈尔滨工业大学(威海)科研基金资助(HIT(WH)201303)
作者简介:陈玉敏(1978—),女,硕士,工程师。研究方向为控制科学与工程。
Design of smart car based on motion sensing control
CHEN Yumin1,XIE Wei1,MENG Xianmin2
(1.College of Information,Harbin Institute of Technology at Weihai,Weihai 264209,China;2.Shandong Kaer Electric Co.,Ltd.,Weihai 264209,China)
Abstract:The MCU is taken as the main controller of the remote end and control end in the design of smart car.The car in the remote end can receive the control signal transmitted from the control end to realize the actions of self⁃turning and atti⁃tude transform.The attitude sensor is mounted on the back of the hand as the control end,and transmits the relevant parameters to the receiving device of the car by wireless transmitters.The controller executes the corresponding filtering algorithm after re⁃ceiving the relevant parameters,and sends instructions to realize remote control.The devices are selected according to the princi⁃ples of low power consumption and high precision in the design.The hardware circuit design including master controller and mo⁃tor drive should conform to the requirement of economy and simplification.The software design gives full play to the characteris⁃tics of the flexible software control to implement the functions of stability and accurate attitude transform of the car.The imple⁃mented smart car can be applied to the medical treatment,entertainment,and other fields.
Keywords:motion sensing control;smart car;gyroscope;wirelless transmission
