复合导引头多源异步信息融合精确拦截算法*
2016-07-14韦道知黄树彩
韦道知,赵 岩,黄树彩,陈 宸
(1.空军工程大学 防空反导学院, 陕西 西安 710051;2.空军装备研究院地面防空装备研究所, 北京 100085)
复合导引头多源异步信息融合精确拦截算法*
韦道知1,赵岩1,黄树彩1,陈宸2
(1.空军工程大学 防空反导学院, 陕西 西安710051;2.空军装备研究院地面防空装备研究所, 北京100085)
摘要:针对单一制导体制难以满足现代战场作战需求且多传感器数据更新率不同步的问题,建立一种新的微惯导/毫米波/红外复合制导体制,研究了该体制下多传感器异步信息融合的时间同步和空间配准问题;提出一种自适应无迹卡尔曼滤波算法,该算法采用预测残差构造状态模型误差统计量,通过自适应因子调整状态模型信息对状态参数估值的贡献,有效控制状态模型噪声异常对状态参数估值的影响。将提出的算法应用到微惯导/毫米波/红外复合制导系统中进行仿真验证,结果表明,提出的自适应无迹卡尔曼滤波算法的解算精度高于标准扩展卡尔曼滤波和无迹卡尔曼滤波算法,能有效提高导弹的制导的解算精度。
关键词:复合制导;地空导弹;信息融合;非线性滤波
随着电子战理论的不断成熟,干扰、隐身、反导和光电对抗技术的逐步深化,现代战场的作战环境日益复杂,单一模式的末制导体制在制导精度、抗干扰性能和可靠性等方面已经难以满足战场作战的需要[1]。常见的制导模式中,毫米波(MilliMeter-Wave,MMW)雷达制导具有全天候测角和测距等优点,但其测角精度较低,并且是一种主动制导模式,容易受到箔条和角反射器等假目标和敌方的电子干扰[2];红外(InfRared,IR)制导通过目标辐射的热能进行探测,具有较高的测角精度和目标识别能力,但是红外制导容易受到云、雾、烟等因素的影响,导致制导精度下降[2-3]。因此,采用复合制导体制成为精确制导技术发展的必然方向,特别是毫米波与红外复合制导体制,凭借其在抗干扰、反隐身等方面的独特优势,受到世界军事强国的强烈关注[4]。
目前已有学者对MMW/IR复合制导体制进行了相关研究。文献[5]通过雷达、红外和人工监控采集测量信息,并将这些信息应用到提出的基于贝叶斯理论的分层粒子滤波(HierarchicalParticleFiltering,HPF)中,仿真结果表明,该算法具有较高的识别率,且均方根误差较小。文献[6]研究MMW/IR复合制导下的最优滤波算法,在比较标准扩展卡尔曼滤波(ExtendedKalmanFiltering,EKF)和无迹卡尔曼滤波(UnscentedKalmanFiltering,UKF)算法的基础上,提出了一种新的航迹迭代UKF。当系统产生较小偏差时,该算法利用目标的历史航迹参数估算出新的实时航迹,通过数字仿真证明,提出的算法具有较高的可靠性,但是文中也指出,当系统的角度存在偏差时,还需要进行深入研究。文献[7]研究复杂环境中的MMW/IR复合制导,提出了一种基于决策信息的改进加权信息融合算法,该算法通过导弹运行状态和受干扰情况计算制导决策信息,再利用该信息优化自适应加权融合因子,提高滤波精度,从而提高复合制导性能。文献[8]研究精确估计MMW/IR复合系统中传感器的系统误差的方法,根据极坐标系下的测量噪声建立误差估计模型,据此推导似然函数和准则函数,采用高斯-牛顿迭代法进行准则函数的优化,得到了一种基于无偏转换测量的精确极大似然误差估计算法。通过仿真实验表明,该算法在误差估计精度和收敛速度上都优于精确极大似然估计算法和修正的精确极大似然算法。文献[9]基于红外和毫米波复合导引系统获得的测量信息,采用滑动模态控制方法,以优化制导精度为目标,设计了一种自适应非线性变结构控制律,利用Lyapunov稳定理论严格证明了制导闭环系统的全局渐进稳定性,并通过仿真验证了这种制导律具有很强的鲁棒性和适应性。
本文在MMW/IR复合制导研究基础上,结合微型惯性测量元件(MiniatureInertialMeasurementUnit,MIMU),提出一种新的MIMU/MMW/IR复合导引头多源信息融合滤波器及其非线性信息融合算法。在时间同步和空间配准的基础上,提出一种自适应无迹卡尔曼滤波(AdaptiveUnscentedKalmanFilter,AUKF)算法。
1复合制导系统数学模型
通过惯性测量元件提供的测量信息,可以解算得到载体的三维位置、速度和姿态信息,且不向外辐射,因此,将MIMU作为主系统,MMW和IR作为辅助系统,可修正MIMU的位置和姿态信息,构成MIMU/MMW/IR复合制导系统。
1.1状态方程
在制导坐标系中,复合制导系统的状态量选用:
x=[δL,δλ,δh,δvE,δvN,δvU,φE,φN,φU,εrx,εry,εrz,rx,ry,rz]T
(1)
状态方程为:

(2)
其中:δL,δλ,δh为位置误差;δvE,δvN,δvU为速度误差;φE,φN,φU为姿态误差;εrx,εry,εrz和rx,ry,rz分别为陀螺误差和加速度计误差;w为状态误差;f(x)是关于状态量的非线性函数,包含以下等式:
式中的参数说明见文献[10]。
1.2量测方程
通过MMW测量得到的位置和姿态信息为:
(3)
式中:r,ψ和θ分别为导弹距目标的距离、方位角和俯仰角信息。通过该方程组可以求得导弹相对目标的三维位置和部分姿态信息,则得到MIMU/MMW量测模型为:
(4)
式中:下标IMU表示通过MIMU测量得到的信息;下标MMW为由毫米波测量得到的信息;v1L,v1λ,v1h,v1ψ和v1θ为MIMU/MMW子系统的位置、方位和俯仰的量测误差。
类似地,通过IR得到的姿态信息为:
(5)
从而可以得到MIMU/IR量测模型为:
(6)
由式(2)、式(4)和式(6)构成了MIMU/MMW/IR制导系统的数学模型。
2可调残差因子的精确拦截算法
针对式(2)、式(4)和式(6)所描述的非线性系统,UKF算法步骤如下。
1)初始化。初始状态和初始方差分别为:
(7)
(8)
状态经扩维后,得到:
(9)
(10)
式中:Q和R分别为状态噪声和量测噪声序列的方差阵。
(11)
(12)
(13)

均值和协方差的权值分别为:
(14)
(15)
其中:λ,α,β均为对称采样中的经验系数。
3)构造自适应因子。令
(16)

(17)
(18)
采用两段函数自适应因子[12]:
(19)
式中,c为常数,一般c取值为1.0~2.5。
4)预测方程:
(20)
(21)
一步预测均方差为:

(22)
(23)
(24)
(25)
(26)
5)更新方程。
滤波增益为:
(27)

(28)

(29)
3滤波数据优化
多传感器信息融合过程中,数据配准是多传感器信息融合中不可避免的重要问题。该问题中存在的难点就是如何把各个传感器的时间和空间统一到参考的标准时间和空间上,即时间同步和空间配准问题。
3.1非等间隔的时间更新问题
时间同步是多传感器信息融合的前提,各传感器之间保持高精度的时间同步是提高数据处理精度的基础。在MIMU/MMW/IR复合制导系统中,惯性器件数据更新率远高于毫米波和红外子系统的数据更新率,因此,考虑主系统量测输出时刻与子系统量测输出时刻不重合的情况下,假设滤波周期为[Tk, Tk+1),寻求各传感器数据更新的最小公倍数作为滤波的采样周期,如图1所示(图中τ表示各传感器采样间隔,N为各传感器采样次数,下标为对应传感器类型)。
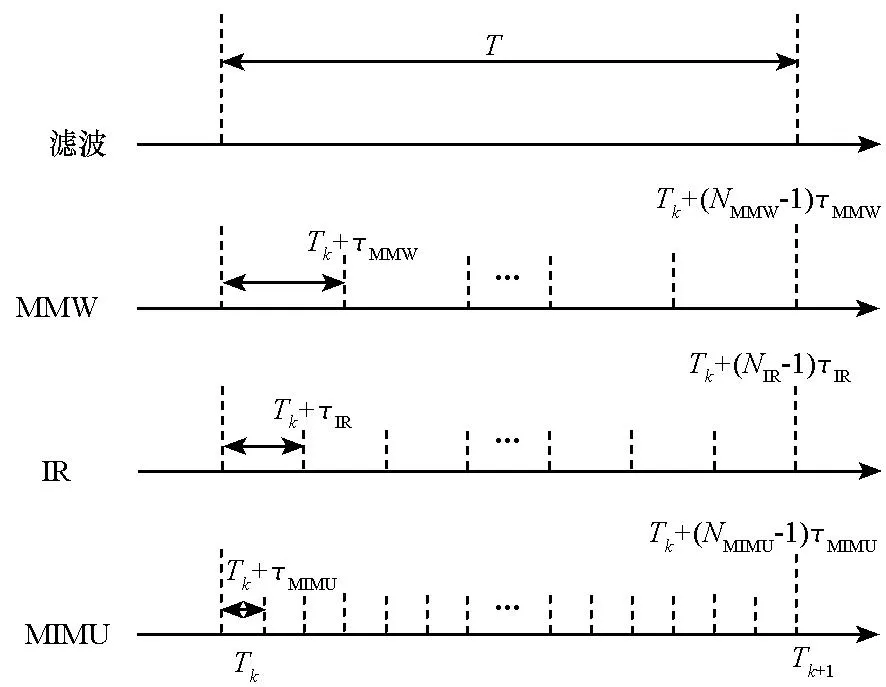
图1 滤波周期与传感器采样周期同步时序图Fig.1 Sequence chart between filtering periodand sampling period of sensor
3.2空间配准问题
传感器安装位置的差异导致各传感器在不同测量坐标系下工作。在数据融合前,需要对来自不同传感器的数据进行处理。处理过程包括坐标系的变换和误差标定。坐标系变换是将已知传感器在量测坐标系中的位置信息映射到参考坐标系中。误差标定通常通过测试已知位置信息的目标来估计各个传感器的偏移量,然后进行校正,原理如式(30)所示:
(30)
式中:δr,δψ和δθ分别表示传感器距离、方位角和俯仰角量测误差信息;rk,ψk和θk为传感器测量得到的距离、方位角和俯仰角信息,其中,k为传感器类型参数,表示MIMU,MMW和IR(IR没有距离信息)测量设备;r,ψ和θ为已知目标的距离、方位角和俯仰角信息;Δrk,Δψk和Δθk为各传感器的系统误差;εr,εψ和εθ为系统随机误差。经过多次测量得到系统误差的数据算术平均值,从而修正系统偏差,如式(31)所示。
(31)
4仿真实验与分析
4.1仿真参数
采用文献[13]中描述的非线性导弹-目标三维相对运动模型,如式(32)所示:
(32)
式中的参数含义见文献[13]。
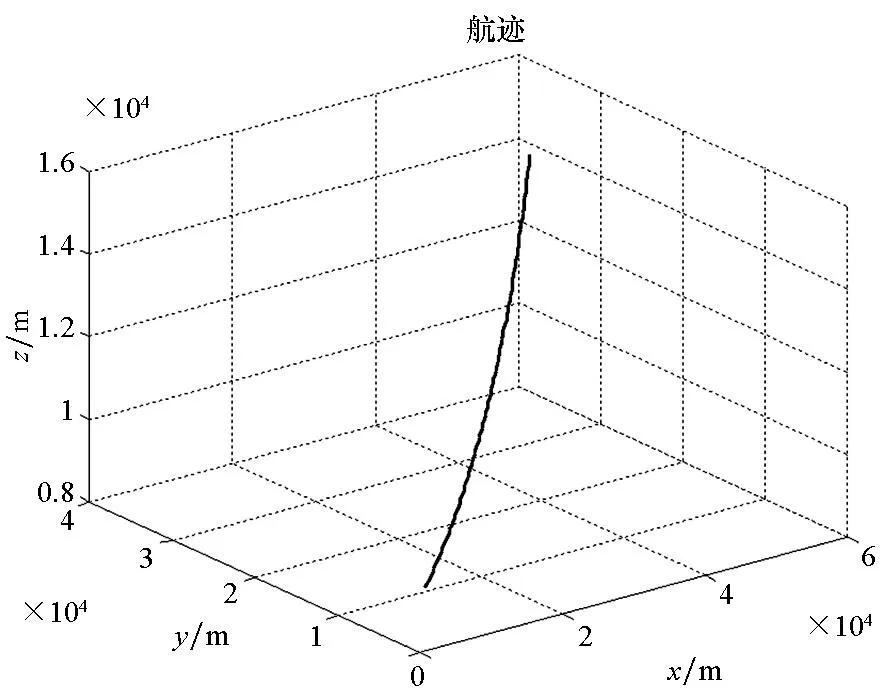
图2 导弹与目标相对运动航迹图Fig.2 Trajectory of relative motion betweenmissile and target
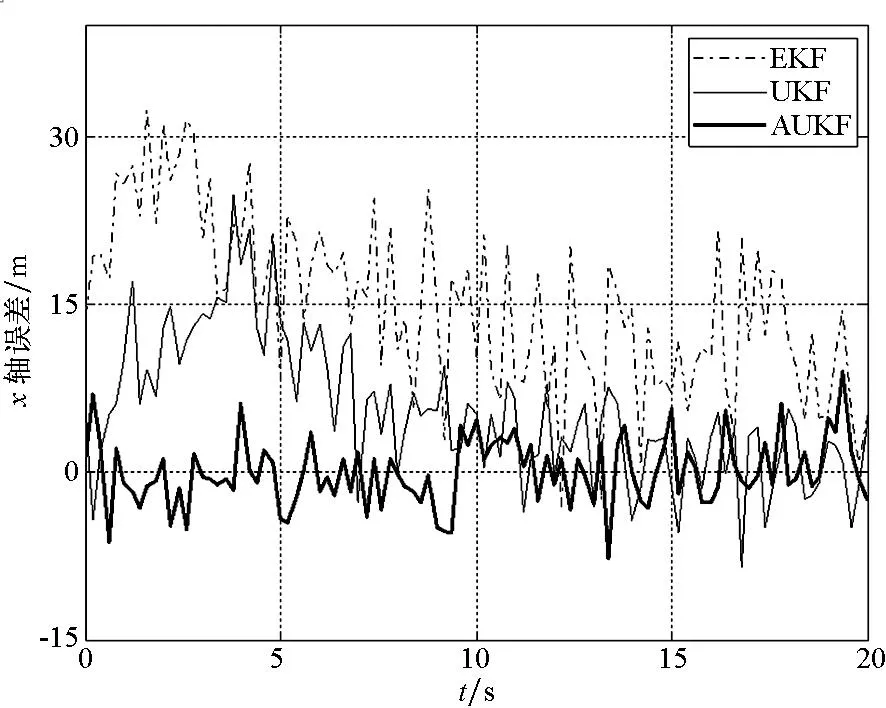
图3 x轴位置误差曲线Fig.3 Position error of x-axis
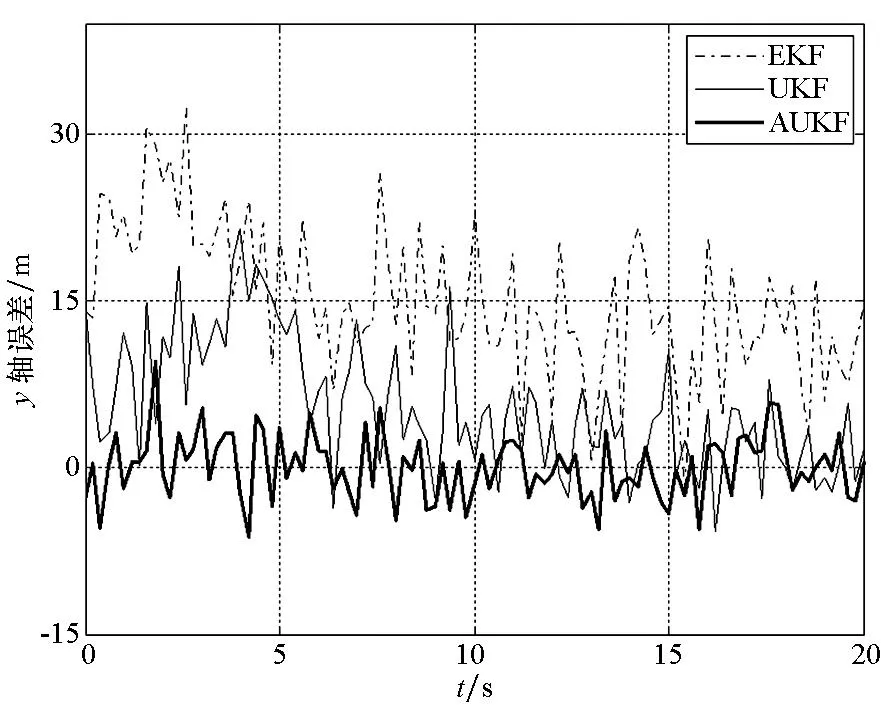
图4 y轴位置误差曲线Fig.4 Position error of y-axis
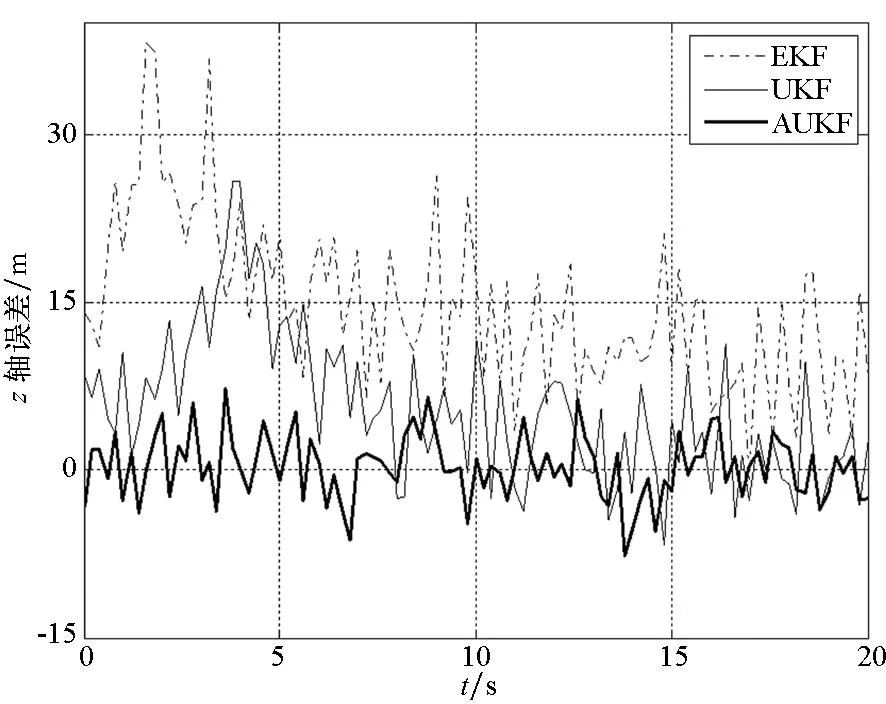
图5 z轴位置误差曲线Fig.5 Position error of z-axis
4.2结果分析
将提出的AUKF和标准EKF,UKF算法应用到建立的MIMU/MMW/IR复合制导系统中进行仿真验证,位置信息的仿真结果如图3~5所示。通过对仿真结果的分析可以得到:
首先,每一幅仿真图中,采用标准EKF解算得到的位置误差最大,标准UKF明显减小,提出的AUKF的位置误差最小。这是因为本研究采用的是非线性程度较高的系统模型,而EKF的泰勒展开只能一阶近似,且舍入误差较大。而当系统误差为高斯误差时,UKF算法至少二阶近似,因此,在相同的仿真条件下,提出的AUKF算法和标准UKF算法的滤波精度明显高于标准EKF算法的。
其次,水平方向的位置误差小于高度方向的位置误差,即图3与图4中3种算法的滤波结果优于图5中的结果。这是因为惯导系统在高度方向上具有不稳定性。但是,滤波结果并没有发散,原因是滤波的量测信息还融入了MMW和IR提供的信息。
最后,从图3~5可以得到,采用标准EKF和标准UKF算法在仿真初期,滤波结果具有较大的波动,而提出的AUKF算法能够使滤波结果较早地平稳输出,提高了UKF算法的收敛速度,说明采用可调残差因子,通过补偿状态模型误差判别统计量,能够有效提高系统的抗扰动能力。
经比较,采用标准EKF算法解算得到的位置误差最大,均方误差在24m以内;采用标准UKF算法得到的位置误差比EKF得到的略小,位置均方误差小于13m。而采用所提出的AUKF算法计算得到的位置误差相对较小,且收敛速度较快,位置均方误差稳定在6m以内。具体数值如表1所示。综上所述,提出的AUKF算法对弹目之间相对位置误差的估计精度高于标准EKF和UKF算法,其能够提高导弹的打击精度。
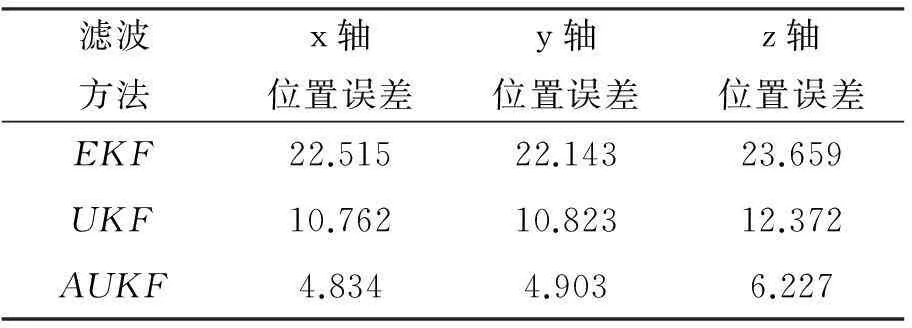
表1 三种算法的位置绝对误差均值
5结论
AUKF算法采用预测残差构造状态模型误差统计量,通过自适应因子调整状态模型信息对状态参数估值的贡献,有效控制状态模型噪声异常对状态参数估值的影响。将AUKF算法应用到MIMU/MMW/IR复合制导系统中进行仿真验证,结果表明,提出的AUKF算法在制导过程中,对弹目之间的位置误差解算精度高于标准EKF和UKF算法,其能有效提高导弹制导的解算精度。
参考文献(References)[1]张大元, 雷虎民, 李海宁, 等. 复合制导导引头开机截获概率估算[J]. 固体火箭技术, 2014, 37(2): 150-155.
ZHANGDayuan,LEIHumin,LIHaining,etal.Estimateofstartuptargetacquisitionprobabilityofseekerofmissileswithcompositeguidance[J].JournalofSolidRocketTechnology, 2014, 37(2): 150-155. (inChinese)
[2]DongCY,YuanQ,WangQ.Acombinedwaveletanalysis-fuzzyadaptivealgorithmforradar/infrareddatafusion[J].ExpertSystemswithApplications, 2010, 37(3): 2563-2570.
[3]KhanMMR,IftekharuddinKM,McCrackenE,etal.Autonomouswirelessradarsensormotefortargetmaterialclassification[J].DigitalSignalProcessing, 2013, 23(3): 722-735.
[4]TianH,LiuHT,ChengHF.Athinradar-infraredstealth-compatiblestructure:design,fabrication,andcharacterization[J].ChinsesPhysicsB, 2014, 23(2): 333-338.
[5]ChavaliP,NehoraiA.Hierarchicalparticlefilteringformulti-modaldatafusionwithapplicationtomultiple-targettracking[J].SignalProcessing, 2014, 97: 207-220.
[6]WangJJ,HuangJJ.Aspatialalignmentalgorithmfortimevaryingbiasesofradarandinfraredsensors[J].ProcediaEngineering, 2011, 15: 2614-2618.
[7]许建忠, 王祖林, 郭旭静. 基于决策信息的毫米波/红外复合制导信息融合[J]. 控制与决策, 2012, 27(1): 120-123, 128.
XUJianzhong,WANGZulin,GUOXujing.Informationfusionbasedondecisioninformationformillimeterwaveandinfraredcompoundguidance[J].ControlandDecision, 2012, 27(1): 120-123, 128. (inChinese)
[8]亓琳, 苏文博, 史泽林. 毫米波/红外成像系统中的精确极大似然误差估计算法[J]. 红外与毫米波学报, 2010, 29(5): 372-377.
QILin,SUWenbo,SHIZelin.ExactmaximumlikelihooderrorestimationalgorithminMMW/IRimagingsystem[J].JournalofInfraredandMillimeterWaves, 2010, 29(5): 372-377. (inChinese)
[9]杨宇彬, 汤国建, 郭建国, 等. 基于红外/毫米波复合制导律设计[J]. 宇航学报, 2011, 32(5): 1035-1038.
YANGYubin,TANGGuojian,GUOJianguo,etal.Compoundguidancelawdesignbasedoninfrared/millimetrewavedetectioninformation[J].JournalofAstronautics, 2011, 32(5): 1035-1038. (inChinese)
[10]赵岩, 高社生, 杨一. 自适应SDV-UPF算法及其在紧组合中的应用[J]. 中国惯性技术学报, 2014, 22(1): 83-88.
ZHAOYan,GAOShesheng,YANGYi.AdaptiveSVD-UPFalgorithmandapplicationtotightly-coupledintegratednavigation[J].JournalofChineseInertialTechnology, 2014, 22(1): 83-88. (inChinese)
[11]YangY,GaoW.Anewlearningstatisticforadaptivefilterbasedonpredictedresiduals[J].ProgressinNaturalScience, 2006, 16 (8): 833-837.
[12]YangYX,GaoWG.AnoptimaladaptiveKalmanfilter[J].JournalofGeodesy, 2006, 80(4): 177-183.
[13]张旭, 雷虎民, 李炯, 等. 变论域模糊自适应滑模有限时间收敛制导律[J]. 国防科技大学学报, 2015, 37(2): 149-155.
ZHANGXu,LEIHumin,LIJiong,etal.Variableuniversefuzzyadaptiveslidingmodeguidancelawwithfinitetimeconvergence[J].JournalofNationalUniversityofDefenseTechnology, 2015, 37(2): 149-155. (inChinese)
Precise interception method of multi-source asynchronous information fusion for combined seeker
WEI Daozhi1, ZHAO Yan1, HUANG Shucai1, CHEN Chen2
(1.AirandMissileDefenseCollege,AirForceEngineeringUniversity,Xi′an710051,China;2.TheAirForceArmamentsAcademyEquipmentInstituteofLand-basedAirDefence,Beijing100085,China)
Abstract:Inviewoftheproblemsthatsoleguidesystemcannotmeetthemodernbattlefielddemandanddataupdateofmulti-sensorisnotsynchronized,anewMIMU/MMW/IR(miniatureinertialmeasurementunit/millimeter-wave/infrared)compositeguidancesystemwasbuiltandthetimesynchronizationandspacematchproblemsofmulti-sensorasynchronousinformationfusioninthissystemwerestudied.AnoveladaptiveUKF(unscentedKalmanfilter)algorithmwaspresented.Thestatisticsofstatusmodelerrorwasbuiltbypredictionerrorinthisalgorithm;contributionofstatusmodelinformationtostatusparameterestimationwasadjustedbyadaptivefactor.Sotheinfluenceofstatusmodelnoiseiseffectivelyregulated.TheproposedalgorithmwasappliedtotheMIMU/MMW/IRcompoundguidancesystemandthealgorithmperformancewastested.ThesimulationresultsshowthattheadaptiveUKFisbetterthanthestandardUKFandextendedKalmanfilter,anditcanimprovethepositioningprecisioneffectively.
Keywords:compositeguidance;surfacetoairmissile;informationfusion;nonlinearfiltering
doi:10.11887/j.cn.201603026
收稿日期:2015-05-04
基金项目:航空科学基金资助项目(20130196004)
作者简介:韦道知(1977—),男,河南淮阳人,讲师,博士,E-mail:superwsw2012@163.com
中图分类号:V448
文献标志码:A
文章编号:1001-2486(2016)03-154-06
http://journal.nudt.edu.cn
