用于簇绒地毯织机的新型钩刀割绒机构
2016-07-12郗欣甫孙以泽
罗 娟, 郗欣甫, 孙以泽
(东华大学 机械工程学院, 上海 201620)
用于簇绒地毯织机的新型钩刀割绒机构
罗 娟, 郗欣甫, 孙以泽
(东华大学 机械工程学院, 上海 201620)
为解决多色提花钩刀割绒系统在移针时整个系统的横移问题,根据簇绒地毯割绒的形成原理,设计了一种新型的用于簇绒地毯织机上的钩刀割绒机构,能准确完成勾纱-脱纱工艺。根据这套钩刀割绒机构的机构简图,分成3个封闭多边形,对每个封闭多边形依据其矢量关系,建立矢量方程式,并利用欧拉公式简化方程,进行实部与虚部分离得到构件位移;接着对相关方程式讨论其一阶导数、二阶导数分别得到构件的速度、加速度的数学求解式。通过这些求解式运用MatLab进行编程,计算所求量,得到各构件的运动规律,以及成圈钩的角位移、角速度和角加速度的变化曲线。
钩刀割绒机构; 运动规律; 数学模型; 变化曲线
在簇绒地毯的织造工艺中,成圈钩握持纱线成圈形成圈绒,或割绒刀割断纱线形成割绒,根据不同的工艺方法,簇绒地毯可通过多种方式来实现地毯的多样性[1-2]。其中为满足不断丰富的花型要求,簇绒地毯织机横动技术得到发展,主要包括底布横动技术和针排横动技术,这2种技术对钩刀割绒机构的要求是不同的。底布横动提花只需要移动底布,钩刀割绒机构不需要横移,比较简单,但是由于受到底布运动的限制,只能织出比较简单的花形,而且提花性能不稳定,精度较差,而针排横动技术是针排和割绒系统在进行提花的同时完成整个机构横向移动提花,地毯花型丰富,适用性广[3]。
本文针对多色提花系统中的钩刀割绒机构进行改善,设计了一种新型的钩刀割绒系统,既可完成钩刀割绒机构勾纱-割绒的功能,而且也可在横动时避免整个钩刀割绒系统的整体横动,减少整个系统的不稳定性。
1 割绒形成原理
割绒绒头的形成是在簇绒针植绒后,由钩刀割绒机构完成成圈割绒运动。割绒机构一般由簇绒针、成圈钩和割绒刀组成,通过其之间具有一定规律的配合,以送纱-勾纱-脱纱的循环性动作使绒纱在底布形成绒圈[4-5]。图1为割绒形成原理的示意图。首先,簇绒针带着绒纱开始下降,与此同时,底布向前进,成圈钩脱纱完毕开始向左摆动,为勾住下一个绒圈做准备,割绒刀已经切割完上一个绒圈向下运动。接着,簇绒针继续下降直至下止点,成圈钩从最右端向左边摆动,并从簇绒针和绒圈之间穿过,准备勾纱,同时,割绒刀下降到下止点。然后,簇绒针开始上升,成圈钩已经摆动到最左端并勾住此时的绒圈开始向右摆回,而割绒刀则向上运动开始割断绒圈。此后,簇绒针继续上升,成圈钩向右摆动到最右端,割绒刀上升到最高处,之后重复前面的动作,于是地毯上的割绒就形成了[6]。
2 钩刀割绒机构设计
根据割绒地毯形成的工艺原理,对钩刀割绒机构进行功能设计。所设计的钩刀割绒机构主要完成勾纱-脱纱的循环动作,据此,本文设计了一种新型的簇绒地毯织机的钩刀割绒机构,其结构简图见图2。图中,成圈钩1固连在钩支承杆3上,和转动板件6相连接,直线轴承8和连接板10构成滑块,该滑块组件的运动由水平运动和竖直运动合成,于是可形成转动板件6绕转动中心摆动,从而实现成圈钩的左右摆动;刀支架4夹住割绒刀2,与刀滑杆5相连,其可在滑槽7内滑动,由9、10组成的滑块的水平与竖直的运动使得割绒刀可实现随转动板件6的摆动同时上下移动完成割绒。
对于该机构的运动驱动机构,目前基本上采用连杆机构,该套新型的钩刀割绒机构采用曲柄滑块机构进行钩刀成圈割绒的执行机构[7]。
3 钩刀割绒机构的运动分析
对钩刀系统进行运动分析,可从整个装备中分离出一组割绒钩刀机构以及一组成圈割绒传动机构进行研究,其机构简图见图3。曲柄滑块机构1、2、3作为传动机构,带动滑块3上下往复运动;滑块3上固连横向导轨,滑块4在该导轨上随着滑块3上下运动,同时还可在导轨上左右移动,因此滑块4在C点处构成合成运动,绕D点转动,从而实现了成圈钩的左右摆动;6为割绒刀,5′为成圈钩,割绒刀6与板件5之间在K处存在滑动副;滑块7的运动和滑块4的运动类似,F点的运动是合成运动,实现了割绒刀6随板件5摆动的同时完成割绒。
对该机构的动力学特性进行分析时,将其整个机构分成3个封闭的多边形,对每个多边形根据其矢量关系式,运用复数矢量法,建立坐标系。首先列出机构的位置方程式,然后对位置方程式进行一次求导和二次求导,分别得到机构的速度和加速度的方程,通过欧拉公式的转换,对方程式进行实部与虚部分离,得到所求量的数学求解式,然后利用计算器或者MatLab等相关软件进行计算求解,从而得到机构的运动特性[8-9]。
3.1 连杆2与滑块3的运动分析
图4为割绒钩刀机构的矢量坐标图。根据图示,按三角形O1AB各矢量的方向有:
l1eiφ1+l2eiφ2=iyb
(1)
式中:l1=7 mm,为曲柄1的长度;l2=200 mm,为连杆2的长度;yb为滑块的位移;φ1为曲柄1的角位移;φ2为连杆2的角位移。
分别取实部和虚部:
l1cosφ1+l2cosφ2=0
(2)
l1sinφ1+l2sinφ2=yb
(3)
由式(2)、(3)可得
(4)
yb=l1sinφ1+l2sinφ2
(5)
按式(1)对时间取导数
(6)
上式每项乘e-iφ2,取实部得
(7)
对式(6)取实部有
(8)
按式(6)对时间取导数得
(9)
上式每项乘e-iφ2,取实部得
(10)
对式(6)取实部,可得
(11)
3.2 滑块4、摆杆5与成圈钩5′的运动分析
根据图4,按多边形O1BCDM各矢量的方向有
iyb+l4=xd+iyd+l5eiφ5
(12)
式中:l4为滑块4的位移;xD为D点水平位移;yD=166 mm为D点竖直位移;l5=103.71 mm为杆件5的长度;φ5为杆件5的角位移。
对上式取虚部:
(13)
由图4中的几何关系可得
φ5′=φ5-(180°-∠CDM)
(14)
式中:φ5′为簇绒钩5′的角位移;∠CDM为角度,其值为50.48°。
按式(12)对时间取导数
(15)
不考虑D点运动,所以有
;
于是可得
(16)
上式每项乘e-iφ5,取实部得
(17)
对(15)式取虚部得
(18)
由于成圈钩5′与摆杆5固连,因此有
(19)
按式(15)对时间取导数得
(20)
上式每项乘e-iφ5,取实部得
(21)
对式(18)取虚部有
(22)
并且有
(23)
3.3 割绒刀6与滑块7的运动分析
根据图4,按多边形O1BFDM各矢量的方向有
(24)
式中:lDK=25 mm为D点到K点的水平位移;φ6为割绒刀6的角位移;l6为K点到F点的距离;l7为滑块7的位移。
对上式取虚部
(25)
由图4中的几何关系有
φ6=φ5+∠CDM
(26)
按式(24)对时间取导数
(27)
上式每项乘e-iφ6,取虚部得
(28)
对式(27)取虚部得:
(29)
将式(27)对时间取导数得:

(30)
上式每项乘e-iφ6,取虚部得:
(31)
对式(30)取虚部有
(32)
4 结果与分析
根据钩刀割绒机构运动分析建立的数学模型,在MatLab中进行编程计算,曲柄的转速为600r/min,可得到相关构件的所求量,计算得到的部分结果如表1所示,根据结果绘出成圈钩的角位移、角速度以及角加速度曲线,如图5所示。
由图5可知,成圈钩的摆角行程为10°左右,割绒刀的摆角行程与成圈钩的摆角行程同步。结合表中数据分析,当主轴转角φ1=0°时,成圈钩与水平轴正向的夹角为90.18°(逆时针方向为正),位于其摆动的中间位置,此时割绒刀随板件转动时的上下运动位移l6的大小为66.17mm;当φ1=45°时,成圈钩与水平轴正向的夹角为86.63°,夹角变小,说明此时成圈钩开始向右摆动,l6的大小为62.75mm,值变小,根据图4可知,此时割绒刀向上运动,割绒完成开始脱纱;当φ1=90°时,成圈钩与水平轴正向的夹角为85.15°,夹角达到最小值,说明此时成圈钩摆到最右端,脱纱完成,l6的大小为61.33mm,值达到最小,此时割绒刀上升到最大高度;当主轴转角φ1=135°时,成圈钩与水平轴正向的夹角变为86.63°,夹角开始向左增大,成圈钩向左摆动,l6的大小为62.75mm,割绒刀开始下降;当φ1=180°时,成圈钩摆回中间位置,割绒刀继续下降;当φ1=225°时,成圈钩继续向左摆动,进行勾纱;当φ1=270°时,成圈钩与水平轴正向的夹角为95.22°,达到最大值,说明成圈钩此时已摆到最左端,纱线已被完全勾住,l6的大小为71.02mm,割绒刀下降到最低处。当φ1=270°~360°时,成圈钩向左摆动,而割绒刀也开始向上运动,之后重复上述动作。
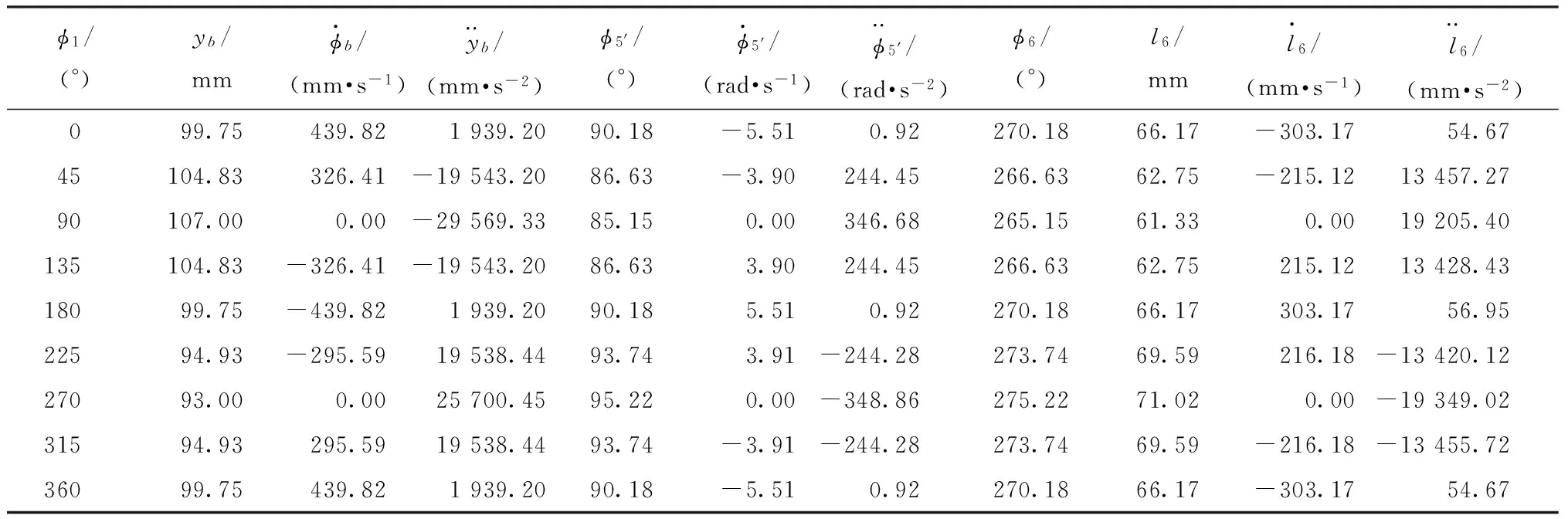
表1 割绒钩刀机构运动分析结果Tab.1 Result of kinematic analysis of cut pile mechanism
根据簇绒地毯的割绒形成工艺,簇绒针穿过底布下降到最低点时,成圈钩勾住纱线,之后继续向左摆动,然后在适当的位置割绒,放纱[10]。通过以上分析可知,在φ1=180°时成圈钩处于中间位置并向左摆动,因此根据簇绒针和成圈钩的配合要求可知,此时簇绒针应该到达下止点或运动到其附近,同时成圈钩开始勾纱,之后,簇绒针向上运动,成圈钩继续之后动作,完成放纱。成圈钩左右的摆动角度都大约为5°,割绒刀上下割绒的行程为10mm左右。同时成圈钩的角加速度也相对较小,过渡平滑,不存在突变,因此该机构具有较好的运动性能,能满足割绒的功能要求。
5 结 论
1)分析割绒形成原理,根据割绒机构的勾纱-脱纱的功能要求,设计出了一套新型的钩刀割绒机构。
2)绘出该钩刀割绒机构的矢量坐标图,并运用封闭多边形的矢量分析方法,建立数学模型,求解成圈钩、割绒刀等构件的位移、速度和加速度,通过MatLab软件进行编程计算,得到所求量,并绘出了成圈钩的位移随主轴摆角变化的曲线、速度随主轴摆角变化的曲线以及加速度随主轴摆角变化曲线。
3)根据所得的数据和运动曲线,对成圈钩和割绒刀的运动进行分析,得到成圈钩的摆角行程和割绒刀的割绒行程。成圈钩的摆角大约为10°,割绒刀的割绒行程大约为10mm:在主轴转角φ1=90°时成圈钩摆到最右端,向右摆动角度大约为5°,割绒刀上升到最高处;在主轴转角φ1=270°时成圈钩摆到最左端,向左摆动角度也为5°左右,割绒刀下降到最低处。在主轴转角φ1=0°~45°的范围内,成圈钩勾住纱线向右摆动,割绒刀割绒;在主轴转角φ1=90°~270°范围内,割绒刀向下运动直至最低点,成圈钩向左摆动直至最左端,此时成圈钩完成勾纱运动。在主轴转角φ1=270°~360°范围内,割绒刀向上运动为割绒做准备,成圈钩勾住纱线向右摆动为脱纱做准备。成圈钩的角加速度值和割绒刀的角速度值都相对较小,变化光滑,无冲击。
FZXB
[1] 王晓春, 郭森茂. 现代地毯制造技术[J]. 国外纺织技术, 1991(9):27-28.WANGXiaochun,GUOSenmao.Moderncarpetmanufacturingtechnology[J].TextileTechnologyOverseas,1991(9):27-28.
[2] 李康, 赵鑫, 华元明,等. 簇绒地毯织造工艺的探讨[J]. 广西纺织科技, 2008, 37(5): 19-21.LIKang,ZHAOXin,HUAYuanming,etal.Discussiononthecarpettuftingprocess[J].GuangxiTextileTechnology, 2008,37(5):19-21.
[3] 阮岑. 地毯簇绒装备横动提花机构研究与设计[D].上海:东华大学, 2008:19-30.RUANCen.Designandresearchofcarpettuftingmachinepatterntransversemechanism[D].Shanghai:DonghuaUniversity, 2008:19-30.
[4] 顾水恒,孟婥,曹维妙.地毯簇绒装备成圈钩传动机构运动分析[J].机械设计与制造,2008(10):219-221.GUShuiheng,MENGZhuo,CAOWeimiao.Kinematicalanalysisofactuatingmechanismoftheloop-hamulusintheloop-cuttingcarpettuftingmachine[J].MachineryDesignandManufacture, 2008(10): 219-221.
[5]JONATHANWilliamClarke,WARRENJohnMeade.Methodforrunningatuftingmachine:USPatent, 6971326[P]. 2005-12-06.
[6] 薛士鑫.机制地毯[M].北京:化学工业出版社,2003: 320-325.XUEShixin.Machine-MadeCarpet[M].Beijing:ChemicalIndustryPress, 2003: 320-325.
[7]ROYTC,JOSEPHLC.Highspeedtuftingmachine:USPatent, 4665845[P]. 1987-05-19.
[8] 黄锡恺.机械原理[M].北京:高等教育出社,1989:63-74.HUANGXikai.TheoryofMachinesandMecha-nisms[M].Beijing:HigherEducationPress, 1989:63-74.
[9] 高永芳, 吴作伟, 宾婵慧,等. 连杆机构运动分析的解析设计[J]. 机械研究与应用, 2006, 19(4):72-73.GAOYongfang,WUZuowei,BINChanhui,etal.Analyticdesignonkinematicsanalysisoflinkagemechanisms[J].MechanicalResearch&Application, 2006, 19(4):72-73.
[10] 丁彩红. 基于非简谐方式的地毯簇绒机成圈运动的时间配合[J]. 纺织学报, 2008, 29(11):111-114.DINGCaihong.Timecoordinationanalysisofloop-formingbasedonn-SHMinacarpettuftingmachine[J].JournalofTextileResearch,2008, 29(11):111-114.
Novel cut pile mechanism on tufting carpet loom
LUO Juan, CHI Xinfu, SUN Yize
(College of Mechanical Engineering, Donghua University, Shanghai 201620, China)
To solve the problem of whole mechanism shogging of cut pile mechanism system on multi-color jacquard weaving, according to the principle of cut pile on tufted carpet, a novel cut pile mechanism on tufting carpet loom was proposed, which could accurately complete the processes of snagging and sloughing. By analyzing the kinetic characteristics of cut pile mechanism, according to schematic diagram of cut pile mechanism, it was divided into three closedi-polygons, and for each closedi-polygon, vector equation was obtained on the basis of vector relations. And using Euler formula, reduced equation, separated real part and imaginary part of equation, displacement of component was obtained. Then for the equation, the first and order derivatives were discussed and mathematical formulas about velocity and angular acceleration of component were obtained. Using the software MatLab, on the basis of solving equations, desired value was calculated and the motion law was given, especially the change curve of the loopi-hamulus about its the angular displacement, angular velocity and angular acceleration curve.
transverse jacquard; movement law; mathematical model; change curve
10.13475/j.fzxb.20150404206
2015-04-23
2016-03-02
国家自然科学基金项目(51375084);教育部创新团队发展计划项目(IRT1220)
罗娟(1990—),女,硕士生。主要研究方向为多幅并行多色提花割绒块毯织造系统设计。孙以泽,通信作者,E-mail:sunyz@dhu.edu.cn。
TH 112.1;TS 103.3
A