全自动智能垃圾桶设计浅谈
2016-07-05罗萱格
罗萱格


摘 要:提出了一种用于收集可压缩生活垃圾、完全无人工干预的智能气动生活垃圾桶,设计了智能化气压传动垃圾桶总体方案,介绍了其机械、气动、电气等系统的方案。分析和试验表明,智能垃圾处理柜噪声不超过30 dB,表明气动系统平顺性好、无噪声。满足了居民区环保、便利的生活需要,具有很好的实际应用价值。
关键词:全自动,垃圾桶,气压驱动
中图分类号:TH122;X70 文献标志码:B
传统的生活垃圾收集方式对环境的污染,困扰着人们的日常生活和健康。
其一,无盖的垃圾桶虽然方便人们投送垃圾,但是存在卫生问题,垃圾的各种难闻的气味特别容易通过空气传播,而细菌的感染间接地給人们带来了种种疾病的隐患,影响人们的生活;
其二,有盖的垃圾桶相对卫生但是很不方便,而且必须通过自己亲手开启垃圾桶的盖子才能扔垃圾,这样就容易造成接触感染,既不卫生又影响心情。
同时,对于传统的环卫垃圾桶而言,换袋、打包、装车等动作必须由环卫工人来完成,既增加了工人的劳动强度又不卫生。
为此,不少科技工作者设计了半自动或全自动垃圾收集装置[ 1-3 ],但均难以实现真正意义上的全自动智能化控制,仍然需要扔垃圾者、收垃圾者,以及垃圾箱管理者进行人工干预,人们难以适应,因此一直难以推广[ 1 ]。
气动技术、PLC控制在机器人中得到了广泛应用[ 4 ],因此,作者提出一种用于收集可压缩生活垃圾、完全无人工干预的智能气动生活垃圾桶。
一、总体方案
(一)选用气动作为驱动
与电动和液动相比,气动具有如下显著优势,因此,这种驱动方式最适合本设备:
1)由于空气的粘度只有液压油的万分之一,流动阻力小,有利于介质的集中供应和远距离输送;
2)气源集中供应的优势,使得这个系统不需要高压电,不但安全,而且容易实现集成化、网络化;
3)由于其压缩性好,机构运动最柔和,冲击小;
4)介质为空气,清洁安全、获取简单、运行成本最低廉、尤其无任何环境污染;
5)能量存储最方便;
6)系统构造最简单、最可靠、使用维护保养最方便。
(二)实现如下功能:
人接近垃圾柜后,感应开关控制气缸将垃圾桶盖2打开→人往垃圾柜内丢可压缩垃圾后,气缸压实垃圾一次并收回到初始位置→人离开后,垃圾桶盖2在气缸驱动下自动关闭→如果检测到垃圾压实后已经到达设定的高度,则一个气缸推动加热器的砧座,从一个方向把垃圾袋推往中心位置;另一个气缸推动加热器的热阻丝座,从另一个方向把垃圾袋推往中心位置,将垃圾袋压紧在电热阻丝座与砧座之间→垃圾袋被压紧后,电热阻丝自动给电,对袋口加热一定时间,然后冷却;然后上述两个气缸分别带着砧座和电阻丝缩回到初始位置→之后,气缸使垃圾柜的侧门打开→之后,气缸伸出推动装满垃圾的垃圾袋,推出使之离开垃圾柜,然后气缸收回至初始位置→之后,气动马达带动卷纸筒,将新垃圾袋运送到中间位置→最后,气缸推动垃圾柜的侧门关上,同时将新垃圾袋压紧。
总之,垃圾柜可实现柜体开闭、垃圾压缩、垃圾袋封口、垃圾推送和换袋步骤的全自动操作,实现了扔垃圾者、收垃圾者永远不需要接垃圾柜、管理者也常年不需要开箱、而自动包装后的垃圾自动整齐排放于地面的“超级懒人”效果,设备不带强电、无污染、可抵抗日晒风吹雨淋。
二、机械结构系统
如图1~8所示,垃圾桶的总体尺寸为:长450,宽440,高470。
本文设计的全自动智能垃圾桶,包括桶体1、设于桶体1上方的桶盖2以及设于桶体1内部的内胆3,该桶体1内装设有桶盖2开闭装置、垃圾压缩机构、垃圾袋25封口装置、垃圾推送机构、换袋装置,所有运动都采用气动驱动和PLC控制。
图1为本文全自动智能垃圾桶的45°俯视示意图;
图2为本文全自动智能垃圾桶的侧视结构示意图;
图3为本文全自动智能垃圾桶的后视结构示意图;
图4为图3中A-A处的剖视结构示意图;
图5为图4中B处的局部放大图;
图6为本文全自动智能垃圾桶的俯视结构示意图;
图7为本文全自动智能垃圾桶中垃圾袋卷展开后的结构示意图;
图8为本文全自动智能垃圾桶中垃圾袋卷换袋时的结构示意图。
图1~ 8中:
1、桶体;2、桶盖2;3、内胆;4、红外传感器;5、橡胶坐垫;6、桶盖气缸;7、垃圾压缩气缸;8、压缩踏板;9、封口气缸;10、位置传感器;11、侧板;12、背板;13、底板;14、垂直门;15、垂直门驱动气缸;16、推送气缸;17、垃圾推送架;18、气动马达;19、驱动转轴;20、颜色传感器;21、从动转轴;22、垃圾袋25卷;23、背景布;24、垃圾袋25放置孔;25、垃圾袋;26、颜色识别带;27、上夹板;28、下夹板。
桶盖2开闭装置包括:设于所述桶盖2上方的红外传感器4,用于检测垃圾桶周围是否有垃圾投放者;安装于桶体1内壁的橡胶座垫和橡胶,用于桶盖2关闭时缓冲;装设于橡胶座垫上的桶盖2气缸,用于驱动桶盖2启闭,该桶盖2气缸的一端与橡胶座垫连接,另一端与桶盖2的内壁相连。
垃圾压缩机构包括安装于桶盖2上的垃圾压缩气缸7,该垃圾压缩气缸7的活塞杆伸入桶体1内,活塞杆伸入桶体1内的一端连接一压缩踏板8。
垃圾袋25封口装置包括:两个分别设置于桶体1的桶口处相对两侧的封口气缸9;其中一个封口气缸9的活塞杆通过绝缘材料连接一加热元件;另一个封口气缸9的活塞杆连接一绝缘木垫,该绝缘木垫上包裹有绝热布,加热元件与绝缘木垫平行设置;内胆3的上部内侧安装有位置传感器10,检测气缸的位置,通过PLC控制气缸的运动启、停。
智能垃圾桶的内胆3用于盛放垃圾,它包括:两块侧板11、一块背板12、一块底板13,内胆3的两块侧板11与桶体1的正面内侧连接,桶体1的正面开口,开口处滑设一垂直门14,桶体1内安装有驱动该垂直门14升降的垂直门14驱动气缸。
智能垃圾桶的垃圾推送机构包括:安装于内胆3下方的推送气缸16,该推送气缸16的活塞杆连接一L形的垃圾推送架17,内胆3的底板13置于该垃圾推送架17上。
智能垃圾桶的换袋装置包括:a.装设于桶体1一侧外壁上的气动马达18,气动马达18连接一驱动转轴19。b.垃圾桶的桶体1与装有气动马达18相对的一侧外壁上安装有从动转轴21,从动转轴21上卷设有垃圾袋25卷22。c.桶体1的外壁上于桶壁与驱动转轴19之间安装有颜色传感器20,颜色传感器20通过垃圾袋25上的颜色带来检测垃圾袋25,通过PLC控制器使得马达将垃圾袋25运送到内胆3中央。d.垃圾袋25卷22,包括长条形的背景布23,背景布23上均匀开设有多个垃圾袋25放置孔24,垃圾袋25放置孔24内设有垃圾袋25,垃圾袋25的袋口与垃圾袋25放置孔24的外周粘贴,背景布23上于相邻的垃圾袋25放置孔24之间设置有颜色识别带26。
垃圾桶桶体1的桶口处设有上夹板27和下夹板28,上夹板27的下沿和下夹板28的上沿均设有橡胶垫29,上夹板27长于下夹板28,垂直门14的两侧设有上搭扣和下搭扣31,垂直门14升起时,下搭扣31将上夹板27和下夹板28分开,垂直门14降下时,上搭扣将上夹板27和下夹板28压合。
气动控制系统包括安装于桶体1内的空气压缩机、电磁换向阀、压力调节阀和流量调节阀,空气压缩机与压力调节阀连接,压力调节阀与流量调节阀相连,流量调节阀连接电磁换向阀。
三、气动系统
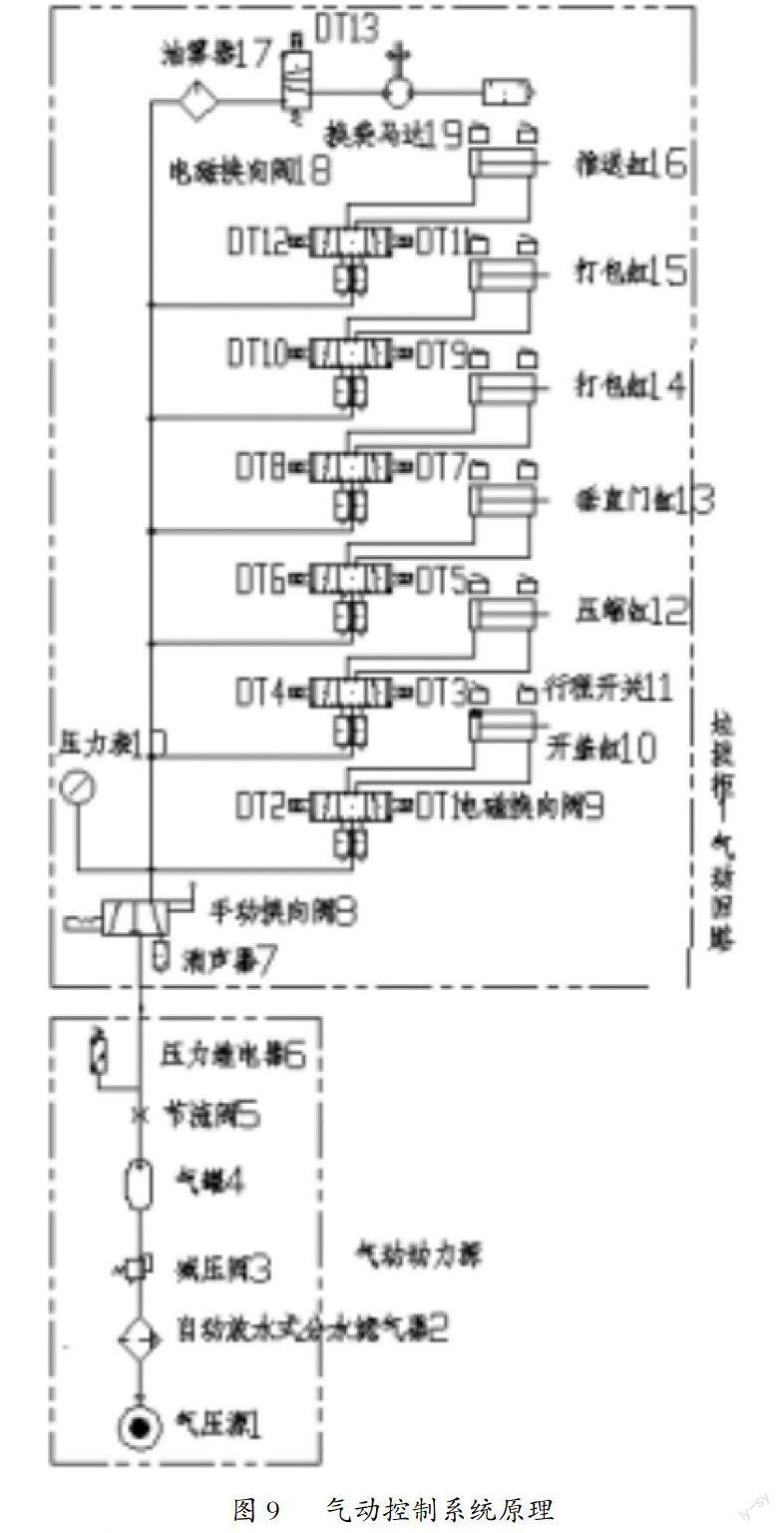
气动控制系统原理图如图9所示。
1)空气压缩机系统1、4:为系统动力源装置,包括气泵和气罐。气泵采用单泵无油静音气压源,体积小巧,工作安静,独立垃圾柜单元所需气压源规格为8 m3,而其最大压力则参考国家标准,选取系统安全压力1 MPa。气罐4为消除气压源排出的气流脉动,同时稳定压缩空气气源系统管路和负载压力,确保气缸、气马达的运动平顺性,此外,因气罐本身就是辅助动力源装置,它可以降低气压源流量配置、减少气压源启动频率。
2)气动马达19和气缸10、12~16:由气动马达19执行垃圾袋的运送,由气缸10、12~16执行桶盖开闭等6个机构的运动。其中,开盖缸10的缸径32,行程50;压缩缸12的缸径20,行程125;垂直门缸13的缸径20,行程300;打包缸14、15分别用于驱动封口用的加热元件和绝缘木垫,缸径20,行程125;推送缸16用于推动垃圾桶的内胆3,以将打包后的垃圾袋推出垃圾桶,推送缸16的缸径20,行程300。
3)节流阀5:本系统各执行机构中,气动马达19所需流量最大,并且速度不能太快以免扯坏图3所示的垃圾袋卷22,因此,节流阀5首要功能是调节气动马达19的速度,节流阀5的第二个功能是,提高各气缸、气马达的运动平顺性,以避免气流过大导致冲击和噪声。
4)气动换向控制阀8、9:三位五通电磁换向阀9共6件,分别用于控制执行气缸的动作方向,实现开关门、封口、压缩推送等动作。手动换向阀8用于维修时,将垃圾柜与气动动力源断开,同时将内部管路气体排掉。
5)减压阀3:用于使系统压力适应负载需要,同时提高执行机构动作的平顺性,以避免气流过大导致冲击和噪声。
四、电控系统
本装置采用热融封口,即用电阻丝通电发热融化塑料,然后冷却,使塑料垃圾袋口固结。本装置选用市面上可以买得到的成熟手压塑料薄膜封口机进行简单改装。塑料薄膜封口机主要技术参数如下:
电源电压220 V,脉冲功率400 W,加热时间0.2~1.5 s可调。
电热封口布局方案如图10所示,将封口机的电阻丝加热器和起垫块作用的绝缘木垫拆分开来,绝缘木垫和和电阻丝加热器分别被两个气缸控制,气缸的到位换向由SQ1~SQ4等4个行程开关检测。
垃圾柜的电气控制采用通用的PLC程序控制[ 4 ],其顺序动作程序如图11所示。据此设计PLC控制系统的功能图,并转换成梯形图,就可以成为PLC控制程序,从而实现对垃圾柜顺序动作过程的控制。
控制电路中,由PLC把脉冲信号CP、方向信号DIR等开展信号发送给电磁换向阀,来控制方向阀的位置、从而控制气缸的运动方向。
五、结语
1)通过采用多种传感器检测相应的控制信号,配合PLC控制器和气动控制系统,实现了桶盖开闭、垃圾压缩、垃圾袋封口、垃圾推送和换袋操作的全自动化作业,实现了垃圾桶的真正的全自动智能化,与普通垃圾桶相比,避免了工作人员与垃圾的直接接触,更加卫生,工作人员只需隔一段时间安放垃圾袋卷并提走打包好的垃圾袋,省时省力。
2)本文所有操作均采用气动控制系统,相对于电动控制系统,成本更低、故障更少、可靠性更高、维修方便、能在恶劣环境下工作;同时,由于控制系统以空气为工作介质,可直接从周围环境中获取,该垃圾桶对环境友好,符合绿色设计、绿色制造的要求。
3)本文的垃圾桶采用垃圾袋上端固定状态下的热封口技术,相对于现有的皮筋封口及金属丝封口等技术,垃圾袋封口的成功率更高,封口质量更好。
本文研制成功的全自动智能垃圾柜,经过试验表明,智能垃圾处理柜噪声不超过30 dB,表明气动系统平顺性好、无噪声。分析和试验表明,该装置具有较好的推广应用价值。
(指导老师:蒋志武)
参考文献:
[1] 李毅华.校园垃圾箱的设计与制造[J].数据采集与处理,科技经济市场,2011(10):24-26.
[2] 张存明.连体垃圾压缩箱的进料系统设计方案的分析[J].装备制造技术,2012(3):21-24.
[3] 蒋伍.智能垃圾收集箱设计[J].科技风,2016(4):126-127.
[4] 范金玲.基于PLC的气动机械手控制系统设计[J].液压与气动,2010(7):36-38.
作者简介:
羅萱格 (1999-),女,汉族,湖南长沙人,高中学生。
指导老师简介:
蒋志武(1973-),男,汉族,湖南长沙人,本科,中教一级/教师,研究方向:物理教育学与应用物理学。
