基于改进ICP算法的线结构光扫描系统误差校准
2016-07-04袁满满穆平安戴曙光
袁满满,穆平安,戴曙光
(上海理工大学 光电信息与计算机工程学院,上海 200093)
基于改进ICP算法的线结构光扫描系统误差校准
袁满满,穆平安,戴曙光
(上海理工大学 光电信息与计算机工程学院,上海 200093)
摘要为了实现工业自动化检测,采用机器人技术与线结构光扫描技术两者相结合,将线结构光传感器安装在机器人法兰盘上,由于安装误差等的存在,影响到扫描系统的测量精度。针对这一问题,文中利用改进ICP算法的点云配准技术,对点云进行配准,反求由安装误差造成的变换矩阵,实现对系统误差的校准。实验结果表明,文中所提方法达到了较好的校准效果。
关键词改进ICP 算法;点云配准;误差校准
现代工业生产领域中,零部件日益精密化,因而对零部件制造以及检测提出了更高的要求。随着近年来机器人技术和结构光传感器技术[1]的发展,越来越多的检测系统将两者结合在一起,实现工业领域的自动化检测。
由于结构光传感器安装误差等因素,使得多次扫描的点云数据无法很好地吻合,点云配准技术可以实现点云的精确化配准,为误差的校准提供了解决方案。两片点云中存在大量对应点信息,将两片点云进行拼接配准,可反求由于安装误差的存在附加到该系统上的坐标变换(旋转矩阵Rb和平移矩阵Tb),进而达到校准的目的,并具有较好的校准精度。
Besl[2]和Chen[3]分别提出ICP算法,即迭代最近点算法(Iteration Closed Point),采用点对点距离约束寻找最近点,求解旋转矩阵和平移矩阵,设定均方误差函数阈值,迭代循环。该算法对初始值较敏感,耗时长,收敛效果不佳。Chen[4]在ICP算法的基础上,提出了利用点云的切平面逼近点云,通过将目标点云中的点到参考点云切平面的距离最小化来求解两个点云间的坐标变换矩阵;Blais[5]等提出对点云进行随机搜索,该方法可提高匹配速度,但影响拼合精度;Li[6]改进ICP算法,在其基础上提出迭代最近线法(ICL)和迭代最近三角法(ICT),这两种方法先分别对两组点云中的点进行连线和三角化处理,后通过一定法则,寻找对应线段和三角形,建立目标函数,再利用四元数法求解变换矩阵。
1ICP算法
假设一三维物体由点集M所定义,当物体上的任意两点P1和P2间距离D不随时间、空间变换时,该物体称为刚体。刚体运动时物体坐标系和基准坐标系之间的关系可用变换矩阵T(4×4矩阵)表示,如式(1)
(1)
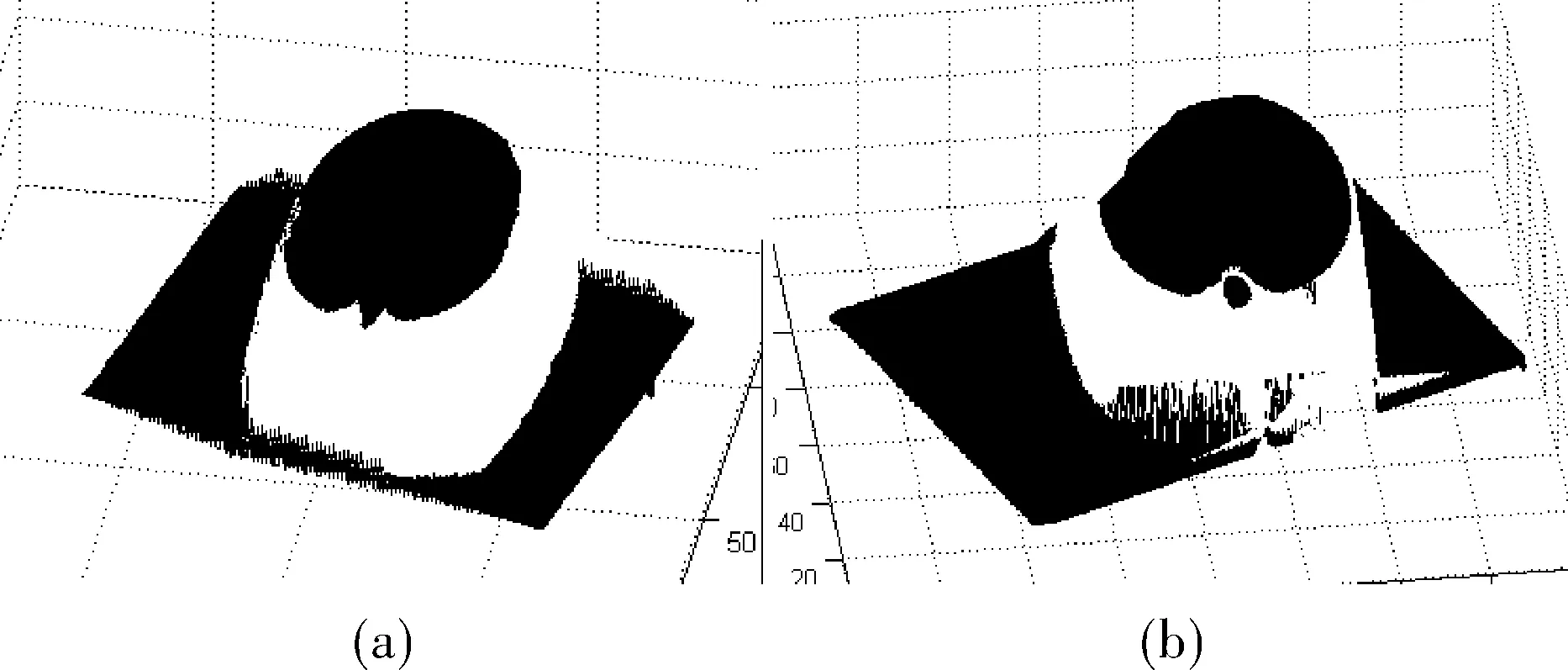
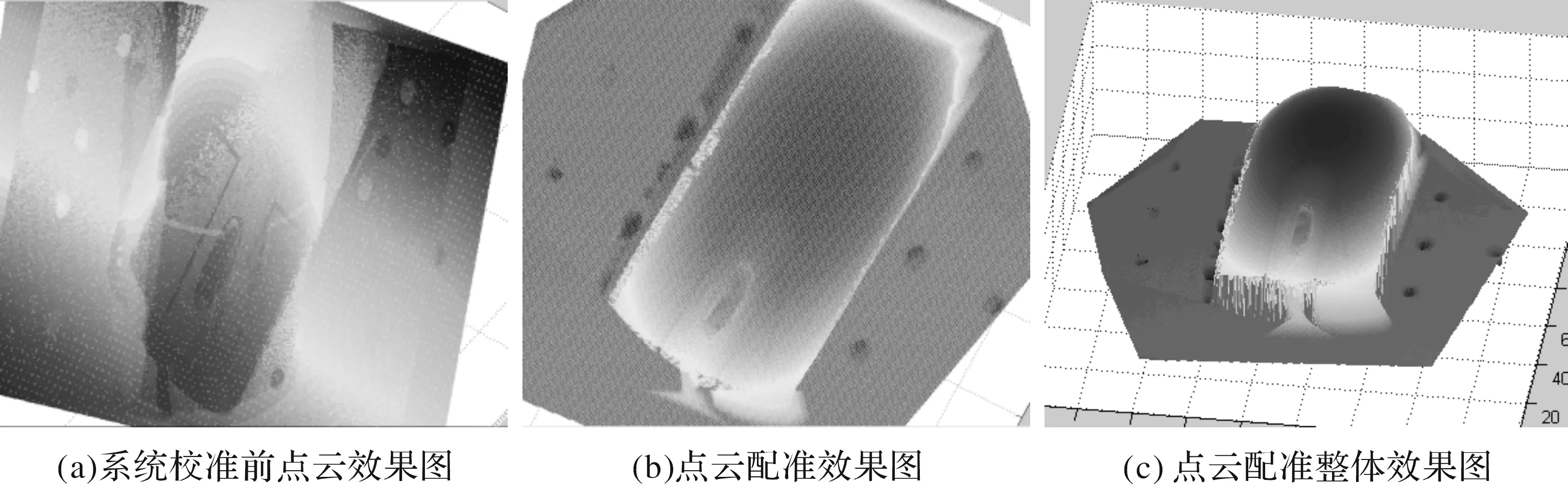
设参考点云为P,目标点云为Q,其中点的个数分别为N和M(N 算法步骤: (1)建立对应点集。对P中的每一点pi在Q中查找最近点qi,满足要求的点建立点集Q’,Q’包含M’个点,N=M’; (2)计算配准矩阵P= Q’×Tm。利用单位四元数法求旋转矩阵Rm和平移向量tm; (3)求旋转平移后的点云:qi’=qi*Rm+tm。建立点集Qm; 关于误差评价函数的阈值l的选取,鉴于本课题讨论的是线结构光扫描点云,该点云属于均匀点云,考虑到线结构光传感器在x方向和z方向上的最小分辨率Resx和Resy,每秒扫描帧数n,以及整个系统扫描时的速度v,则 l≤min{Resx,Resy,v/n} 2建立对应点集 目前确定对应点集的方法主要分3类[7-14]:点到点、点到投影、点到面。 其中点到点方法虽计算简便直观,但其所确立的对应点集中存在大量错误对应点对,算法迭代容易陷入局部极值。点对投影可大幅缩短计算时间,但无法达到较高的拼接精度。本文选择点对面方法,其在3种方法中精度最高。 对于P中的每一点p0,首先应求出Q中与p0欧氏距离最近的3个点,距离求取公式如下 (2) 然后用这3点做一个三角面,假设三点坐标分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3),则这个三角面的方程为 (3) 以点p0到该三角面的垂足作为它的最近点。在点对点确定对应点集的情况中,多受到采样间距的影响,P点云中的采样点实际上应该匹配到Q点云的两点中间,但点对点的算法只能选择在Q点云中的点。而点对平面的算法使得P中的点能匹配到Q点云中两点之间的插值,因此有可能低于采样点云在x方向和y方向上的采样间隔。 3单位四元数求最优解 关于寻找变换矩阵的问题,Arun[11]等人曾提出先确定最优旋转矩阵R,后根据R确定平移向量t,即t=F(R)。该方案缺点是计算t时带来积累误差。另一方案是Herbert[12]提出的分别求解R和t的方法,常导致两者的最优解并不相吻合。此外Kamel[13]采用单位四元数方法求取变换矩阵最优解,提高了计算精度,本文在其基础上加以应用,并实现较好的求解结果。 四元数是简单的超复数,由实数加上3个虚数单位i,j,k组成。 四元数可表示成 (4) 其中 (5) 4改进的ICP算法步骤 根据本文设计要求,提出的改进ICP算法步骤如图1所示。 图1 改进后的ICP算法流程图 图2 初始点云图 5实验结果和分析 在实验过程中,采用有部分突出细节特征的鼠标作为验证工具,从两个方向对鼠标进行扫描,并对扫描点云进行拼接,结果能较为直观的反映算法的实现情况。 图3 实验结果 分别对鼠标进行正面扫描和侧面扫描,用Matlab编程,利用本文提出的ICP算法进行点云配准。图2是两幅从不同角度扫描的鼠标的点云图。图3(a)是误差校准前,观察两片点云在坐标系中的重叠部分。可以看出,两片点云不能较为精确的拼合在一起,该误差主要是由安装误差引起的,会影响整个测量系统的精确度,需予以校正;图3(b)是应用改进后的算法对两片点云进行配准后的效果图,观察鼠标及工作台面,配准效果良好。图3(c)是点云配准后整体效果图。最终迭代收敛值为error=D≈0.07,已低于采样点坐标间距,说明使用的模型基本正确。图4为迭代收敛过程,从图中可看出,平均近点对的距离从开始的4mm逐渐收敛到0.5mm以内,且逐步趋于稳定,从以上分析可以得出,改进的ICP算法应用到点云配准中效果良好,较好的校准了该测量系统的误差。 图4 迭代的收敛 6结束语 本文研究的基于改进ICP算法应用到线激光扫描系统中误差校准的方法,在实验中,效果良好,提高了系统测量的精度,具有可行性与可推广性,不失为一种校准激光扫描中系统误差校准的良好解决方案。 参考文献 [1]吴庆华.基于线结构光扫描的三维表面缺陷在线检测的理论与应用研究[D].武汉:华中科技大学,2013. [2]BeslPJ,MckayND.Amethodforregistrationof3Dshapes[J].IEEETransactionsonPatternAnalysisandMachineIntelligence,1992,14(2):239-256. [3]ChenY,MedioniG.Objectmodelingbyregistrationofmultiplerangeimages[C].Sacramento,CA,USA:The1991IEEEInternationalConferenceonRoboticsandAutomation,1991. [4]ChenY,MedioniG.Objectmodelingbyregistrationofmultiplerangeimages[C].CA,USA:Proceedingofthe1991IEEEInternationalConferenceonRoboticsandAutomation,1991. [5]BlaisG,LevineMD.Registeringmultiviewrangedatatocreate3Dcomputergraphics[J].IEEETransactionsonPattenAnalysisandMachineIntelligence,1995,17(8):820-824. [6]LiQingde,GriffithsJG.Iterativeclosestgeometricobjectsregistration[J].ComputersandMathematicswithApplications,2000,40:1 171-1 188. [7]解则晓,徐尚. 三维点云数据拼接中ICP及其改进算法综述[J].中国海洋大学学报:自然科学版,2010,40(1):99-103. [8]罗先波,钟约先,李仁举.三维扫描系统中的数据配准技术[J].清华大学学报:自然科学版,2004,44(8):1104-1106. [9]朱延婿,周来水,张丽艳.散乱点云数据配准算法[D].计算机辅助设计与图形学学报,2006,18(4):475-481. [10]戴静兰,陈志杨,叶修梓.ICP算法在点云配准中的应用[J].中国图象图形学报,2007,12(3):517-521. [11]ArunKS,HuangTS.Least-squaresfittingoftwo3-Dpointsets[J].IEEETransactionsonPatternAnalMachhineIntelligencePAMI,1987(9):698-700. [12]HerbertM,FaugerasOD.A3-Drecognitionandpositioningalgorithmusinggeometricalmatchingbetweenprimitivesurfaces[C].Beijing:EighthInternationalConferenceonArtificialIntelligence,1983. [13]ChouJ,Kamel.FindingthepositionandorientationofasensoronarobotmanipulatorusingQuaternion[J].IntlernationalJournalofRobotResearch,1991,10(3):240-254. [14]解则晓,张成国,张国雄.线结构光测量数据的自动拼合方法[J].中国机械工程,2005,16(9):775-778. Installation Error Calibration Based on Line Structure Improved ICP Optical Scanning System YUAN Manman,MU Pingan,DAI Shuguang (School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology,Shanghai 200093, China) AbstractIn order to realize the detection of industrial automation, the technology of robot and line structure light scanning technology is combined, the line structure light sensor installed on the robot flange, because the installation error exists, affect the measurement accuracy of the scanning system. To solve this problem, by using the improved ICP algorithm of point cloud registration technology in this paper, the registration of point cloud, the reverse transformation matrix caused by installation error, the calibration of the system error. The experimental results show that the proposed method achieves better calibration. Keywordsthe improved ICP algorithm; point cloud registration; the installation error calibration 收稿日期:2015-11-07 作者简介:袁满满 (1991-),女,硕士研究生。研究方向:仪器仪表工程专业 工业图像处理。 doi:10.16180/j.cnki.issn1007-7820.2016.06.051 中图分类号TP301.6 文献标识码A 文章编号1007-7820(2016)06-178-04