基于D-H坐标系法的机器人运动学研究
2016-07-04张博
张 博
(惠州工程技术学校 工学系,广东 惠州 516001)
基于D-H坐标系法的机器人运动学研究
张博
(惠州工程技术学校 工学系,广东 惠州 516001)
摘要在机器人运动学研究中,普遍用D-H坐标系法作为分析方法。虽然D-H坐标系法在机器人运动学中应用广泛,但其本身缺少误差补偿。文中通过D-H正运动学法构建了机械运动学模型,并在此基础上提出了一种误差分析方法。该方法通过分析坐标系参数偏差的方式计算偏差量并纠正原模拟结果。通过matlab仿真,所得结果对比表明,D-H正运动学法能较好地描述机械结构的运动趋势,加入参数误差补偿后,能得到更准确的结果。
关键词机器人;D-H坐标系;误差补偿;参数偏差
在机器人运动学分析中,关节的运动方式决定着机器人的运动方式[1-2]。因此,各关节处运动参数的分析至关重要。一直以来,对于机器人运动学的研究均是在关节处建立坐标系,通过对坐标系参数的分析来判断关节的运动方向,进而分析整个机器人或机器人某部分的运动方向[3-4]。建立机器人坐标系有两种较为常用的方法,分别是旋量理论和D-H法,相对于旋量理论,D-H法应用更为广泛[5-7]。D-H法的本质是坐标变换,将坐标系建立在机器人的移动或转动关节处,然后进行相应的坐标变换,得到关节变量参数表,代入运动方程获得解析解[6]。D-H法适用于大部分机械结构的运动学研究。但在用其建立各关节坐标系时,参数等选择的偏差会给最终结果带来影响,使分析结果偏离真实情况。
本文应用D-H正运动学法构建目标机械结构的运动模型,并提出一种误差补偿法。该方法通过分析坐标系的参数误差,并根据实际情况,提供适当的补偿,能使模拟结果更加接近真实情况。
1D-H坐标系法分析
D-H模型是常用的机器人运动学模型,用θi、αi、ai和di4个参数描述机器人相邻两连杆的关系,简称四参法[8]。其中,θi表示关节处转角;αi表示关节处扭角;ai表示杆长;di表示连杆间距。DH运动学模型的齐次变换矩阵通式为
A=Rot(x,αi)Trans(x,ai)Rot(z,θ)Trans(z,di)=
(1)
1.1机器人正运动学分析
有如下机械结构,如图1所示。根据D-H坐标法简要建立图2所示坐标系。D-H坐标系的关节变量参数如表1所示。

图1 机械结构

图2 D-H法简要坐标系

iαi-1/cmαi+1/(°)di/mmθi/(°)100fθ12g=8-900θ23l1=6400θ34l490l2=46θ45l3=15-900θ560900θ6
根据表1的参数可求出各连杆坐标系之间的齐次变换矩阵,即
其中,c表示cos;s表示sin,则机器人末端执行器对基础坐标系的齐次坐标变换矩阵为
(2)
其中,T11=((cθ1·c(θ2+θ3)·cθ4-sθ1·sθ4)cθ5-cθ1·s(θ2+θ3)sθ5-(cθ1·c(θ2+θ3)sθ4+sθ1·cθ4))sθ6;
T12=(-(cθ1·c(θ2+θ3)·cθ4-sθ1·sθ4)cθ5-cθ1·s(θ2+θ3)sθ5-(cθ1·c(θ2+θ3)sθ4+sθ1·cθ4))sθ6;
T13=((cθ1·c(θ2+θ3)·cθ4-sθ1·sθ4)cθ5-cθ1·s(θ2+θ3)sθ5;
T14=(c(θ2+θ3)·cθ4·l3+c(θ2+θ3)·l4+s(θ2+θ3)·l2+cθ2·l1+g)cθ1-sθ1·sθ4·l3;
T21=((sθ1·c(θ2+θ3)·cθ4-cθ1·sθ4)cθ5-(sθ1·c(θ2+θ3)sθ4+cθ1·cθ4))sθ6;
T22=(-(sθ1·c(θ2+θ3)·cθ4-cθ1·sθ4)cθ5-(sθ1·c(θ2+θ3)sθ4+cθ1·cθ4))sθ6;
T23=((sθ1·c(θ2+θ3)·cθ4-cθ1·sθ4)cθ5;
T24=((sθ1·c(θ2+θ3)·cθ4-cθ1·sθ4)·l3+(c(θ2+θ3)·l4+s(θ2+θ3)·l2+cθ2·l+g)sθ1;
T31=-(cθ5·s(θ2+θ3)·cθ4+c(θ2+θ3)·sθ5)cθ6+sθ4·s(θ2+θ3)sθ6;
T32=(cθ5·s(θ2+θ3)·cθ4+c(θ2+θ3)·sθ5)cθ6+sθ4·s(θ2+θ3)sθ6;
T33=-sθ5·s(θ2+θ3)·cθ4+c(θ2+θ3)·cθ5;
T34=-s(θ2+θ3)·cθ4·l3-s(θ2+θ3)·l4+l3·c(θ2+θ3)-sθ2·l1+f。
1.2误差分析
影响机器人运动误差的因素较多,但在定标过程中,误差主要是关节参数偏差所引起的,某关节所产生的偏差为各关节参数误差的叠加
(3)
每一关节均有参数误差存在,各关节传递到执行器末端,末端端点误差矩阵为
(4)
(5)
2实验仿真与结果分析
从机器结构运动轨迹上选取一段,根据上述分析利用Matlab模拟此轨迹,实际轨迹与利用D-H坐标法得到的轨迹及加入补偿误差后得到的轨迹对比如图3所示。
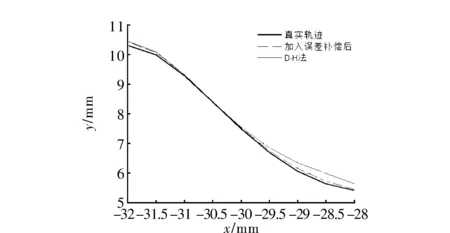
图3 轨迹对比图
从对比图可看出,应用D-H算法得到的轨迹与真实轨迹较为接近,能正确描述机器运动趋势,并可满足基本的运动学研究。加入误差补偿值之后的轨迹更接近真实轨迹,能更好描述机器的运动趋势,可用于要求较高的机器人运动学研究。但误差不可能完全消除,由于人为的参数选取偏差,以及一些数值计算中的偏差,仍会导致模拟结果与真实情况存在一定的偏差。另外,加入补偿值的大小,同样也会在一定程度上影响模拟分析的结果。
3结束语
在运动学分析中,通过D-H正向运动学分析法,可准确模拟机械结构的运动趋势。但由于参数等的误差,会使通过D-H法得到的轨迹与真实轨迹出现偏差。根据实际情况,加入误差补偿会使得到的轨迹与真实轨迹更为相似,得到更好的结果。但此方法仍不完善,由于补偿值的计算较为复杂,易出现错误,故加入补偿值后可能得到更差的结果。因此,后续的工作还需改进误差补偿机制。
参考文献
[1]蒋刚,龚迪琛,蔡勇,等.工业机器人[M].成都:西南交通大学出版社,2011.
[2]任伟建,陈奕君.基于神经网络的移动机器人多传感器数据融合研究[J].电子设计工程,2014,22(12):5-8.
[3]李正文,张国良,张维平,等.基于中枢模式发生器的仿人机器人步态规划[J].电子设计工程,2011,19(13):69-72.
[4]Denavit J,Hartenberg R S. A kinematic notation for lower-pair mechanisms based on matrices[J].ASME Journal of Applied Mechanics,1955,22(2):215-221.
[5]李宪华,郭永存,宋韬.六自由度工业机器人手臂正运动学分析与仿真[J].安徽理工大学学报:自然科学版,2013,33(2):34-38.
[6]宋伟刚.机器人学-运动学,动力学与控制[M].北京:科学出版社,2007.
[7]Paul R P. Robot manipulators: mathematics, programming, and control[M].Cambridge, MA:The MIT Press,1981.
[8]侯琳祺,冯淑红.基于距离精度的机器人5参数位置误差模型[J].机器人技术与应用,2002(2):31-35.
[9]任永杰,邾继贵,杨学友,等.基于距离精度的测量机器人标定模型及算法[J]计量学报,2008, 29(3):198-202.
An Study of Robot in Kinematics based on Coordinate System
ZHANG Bo
(Engineering Department, Huizhou Engineering Technical School, Huizhou 516001, China)
AbstractIn the study of robot kinematics,it’s pretty common to use D-H coordinate system method as the analytical method.Although the D-H method is widely applied in robot kinematics,it’s still lack of compensatorydeviation.A model of mechanical kinematics is built through D-H forward kinematics method in this article.And an error analysis method is brought up base on that.This method analyzes the parameters deviation of the coordinate system to calculate the total deviation and correct the results in original simulation as well.According to the contrast results of simulation in matlab, D-H forward kinematics method can develop a good description of the movement trend of the mechanical structure.After adding a proper compensation for parameter error,it can get a more accurate result.
Keywordsrobot; D-H coordinate system; error compensation; parameter deviation
收稿日期:2015-12-16
作者简介:张博(1983-),男,硕士,讲师。研究方向:电子信息。
doi:10.16180/j.cnki.issn1007-7820.2016.06.044
中图分类号TP242
文献标识码A
文章编号1007-7820(2016)06-154-03
