喷油嘴针阀的公差建模及规范设计*
2016-07-04孙永厚张宇轩黄美发肖振泉
孙永厚,张宇轩,黄美发,肖振泉
(1.桂林电子科技大学 机电工程学院,广西 桂林 541004;2.广西制造系统与先进制造技术重点实验室,广西 桂林 541004)
喷油嘴针阀的公差建模及规范设计*
孙永厚1,2,张宇轩1,黄美发1,2,肖振泉1
(1.桂林电子科技大学 机电工程学院,广西 桂林541004;2.广西制造系统与先进制造技术重点实验室,广西 桂林541004)
摘要:产品规范模型是新一代GPS实现产品对偶性认证的前提。为了建立喷油嘴针阀规范模型,首先采用基于SDT(small displacement torsor,即小位移旋量)的三维公差域建模方法,建立了喷油嘴针阀主要形位公差的数学模型,然后根据其误差的实际测量数据,利用Matlab生成针阀形位公差带内的随机点,将随机点导入三维建模软件Catia中,通过曲面操作生成零件的规范模型。最后利用新一代GPS的规范操作算子,完成了喷油嘴针阀的规范设计,为实现产品功能要求、规范设计及测量认证的一致性表达提供了一定理论基础。
关键词:喷油嘴针阀;形位公差;规范设计
0引言
喷油嘴针阀和针阀体是柴油机的精密零件,主要特点是结构尺寸小、形位误差精度高,而且配合精度和表面质量要求严格。所以对其公差的规范设计已成为国内外学术界研究的热点。
在新一代GPS标准体系中,通过建立规范模型实现几何产品在功能、设计、制造及检验各个阶段规范的统一,规范模型是实现GPS系统各阶段规范表达的根本。在产品设计阶段,工程师根据几何产品的功能要求,利用规范模型对实际工件表面进行模拟,对限定要素进行分离、提取、滤波、拟合等操作,确定在满足功能要求前提下几何要素的最大偏差,用来指导公差设计[1]。但是,目前对新一代GPS规范设计的研究主要是建立形位公差的数学模型[2-3],并在Matlab内生成产品的规范表面模型[4],没有涉及到针对产品实体规范模型的研究,本文采用Matlab与Catia联合建模的方法,生成了包含形位公差的实体规范模型,为针阀的后续有限元分析提供了基础。
1针阀主要形位公差的数学模型
1.1针阀的功能要求
新一代GPS标准体系要求规范模型需满足零件的功能要求。喷油嘴针阀偶件的功能要求主要有针阀外圆柱面与阀体内圆柱面之间的滑动以及圆锥面对喷孔的密封作用,根据喷油嘴针阀的功能要求及其失效形式,可以确定其主要形位公差类型有:针阀外圆柱工作面的圆度、针阀外圆柱工作面轴线的直线度、密封圆锥的圆锥度,生成的规范模型需符合这一特征。
1.2SDT理论
SDT小位移旋量是表示理想特征变动量的矢量,在1996年由Bourdet引入公差领域[6]。任意理想特征的变动量都可以表示为三个平动矢量和三个转动矢量。其中,平动矢量为(dx,dy,dz)T,转动矢量为(dθx,dθy,dθz)T,则SDT矢量可表示为D=(dθx,dθy,dθz,dx,dy,dz)T。
1.3针阀外圆柱工作面圆度公差数学模型
针阀外圆柱工作面的圆度公差带为针阀上任一截面的半径差为TF的两个同心圆之间的区域。图1所示为圆度公差带相对尺寸公差带在x轴方向最大位移时的情况。根据新一代GPS的恒定类和恒定度的概念,圆度公差带具有沿x轴、y轴平动的两个自由度,由SDT的三维公差域建模方法可得圆度公差的数学模型为[3]:
(1)
约束为:
(2)
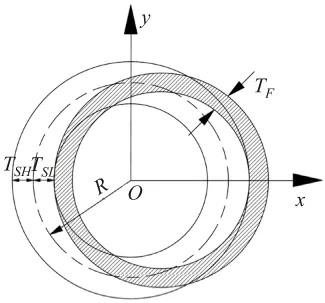
图1 圆度公差带最大位移示意图
1.4针阀外圆柱工作面轴线直线度公差数学模型
针阀外圆柱工作面轴线直线度公差带是直径为TF的一个圆柱内的区域。图2所示为轴线直线度公差带相对尺寸公差带绕y轴最大转动时的情况。根据新一代GPS的恒定类和恒定度的概念,轴线直线度公差带具有沿x轴、y轴平动,绕x轴、y轴转动的四个自由度,由SDT的三维公差域建模方法可得轴线直线度公差的数学模型为[7]:
(3)
约束为:
(4)

图2 轴线直线度公差带最大转动示意图
1.5密封圆锥圆锥度公差数学模型
针阀密封圆锥的圆锥度公差带是截面半径差为TF的两个同轴圆锥之间的区域。图3所示为圆锥度公差带相对尺寸公差带绕y轴最大转动时的情况。根据新一代GPS的恒定类和恒定度的概念,轴线直线度公差带具有沿x轴、y轴、z轴平动,绕x轴、y轴转动的五个自由度,由SDT的三维公差域建模方法可得轴线直线度公差的数学模型为:
(5)
约束:
(6)

图3 圆锥度公差带最大转动示意图
2喷油嘴针阀规范模型的生成
规范模型是一个非完美形状、模拟真实表面的模型,是由无限仿真点组成的。本文采用在零件公差带内随机生成模拟点的方法来建立规范模型。
2.1针阀外圆柱工作面轴线直线度模拟点的生成
首先根据公式(3)、(4)通过零件的尺寸公差值与直线度公差值确定轴线直线度公差带的变动范围,再按照正态分布随机生成dθx,dθy,dx,dy四个参数确定轴线直线度公差带的位置和方向。用一组平行于xoy面的平面与直线度变动公差带相交,得到一组平行的圆形截面,如图4所示。最后在该截面内随机取点即得到轴线直线度的模拟点。

图4 轴向分层示意图

图5 圆周向分角示意图
2.2针阀外圆柱工作面圆度模拟点的生成
根据公式(1)、(2)通过零件的尺寸公差值与圆度公差值确定圆度公差带的变动范围,再按照正态分布随机生成dx,dy两个参数确定圆度公差带的位置。在2.1节生成的平行截面中,以每个截面内的直线度模拟点为圆心等角度生成n个圆度模拟点,如图5所示。其中模拟点的坐标由以下公式求得:
(7)
式中:p、q为轴线模拟点坐标;r0为零件理想半径;Δ为随机值。
2.3密封圆锥圆锥度模拟点的生成
根据公式(5)、(6)通过零件的尺寸公差值与圆锥度公差值确定圆锥度公差带的变动范围,再按照正态分布随机生成dθx,dθy,dx,dy,dz五个参数确定圆锥度公差带的位置和方向。将圆锥按照以上五个参数进行变动,然后用一组平行于xoy面的平面分别与变动圆锥和其轴线相交,得到一组理想圆和圆心,如图6所示。以每个平行平面与轴线的交点为圆心等角度生成n个圆锥度截面的模拟点,其中模拟点坐标由公式(7)求得。即可得到满足圆锥度公差要求的模拟点。

图6 圆锥度规范模型生成示意图
2.4生成实体模型
将Matlab程序生成的点集导入Catia,由于程序生成的点是多截面内的离散点坐标,数据量非常大,如果采用手工描点工作量极大且极易出错。这里利用Catia宏处理可以解决这一问题。首先利用宏命令将各个截面和轴线的离散点连结成样条曲线,通过多截面曲面将各个截面连结成圆柱面及圆锥面。将圆柱面及圆锥面接合、封闭即可得到针阀的规范模型。
2.5应用实例
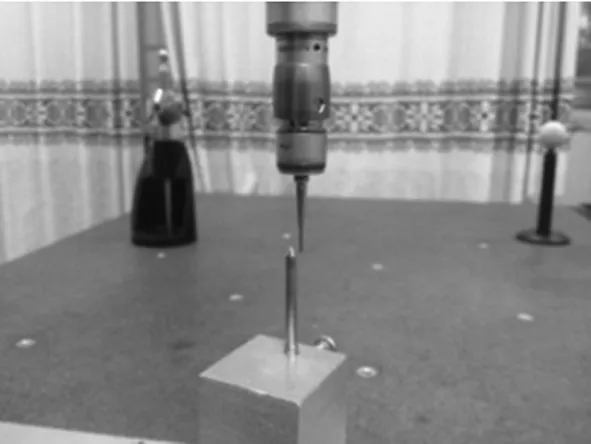
图7 针阀测量图
现阶段常用的误差测量方法为三坐标测量机(CMM)法。CMM测量,精确度高,速度快,适应性强,数字化控制[10],可以满足喷油嘴针阀形位误差的测量。因此,本文采用海克斯康global 07·10·07三坐标测量机对德尔福CRSN011-F型喷油嘴针阀进行测量,如图7所示。得到该型号针阀的各形位误差范围为:圆度误差0.014~0.046mm;直线度误差0.020~0.050mm;圆锥度误差0.032~0.064mm, 根据测量结果绘制喷油嘴针阀零件图,如图8所示。首先由公式(1)~(6)得到针阀圆度、轴线直线度及圆锥度公差域的变动范围,然后按照正态分布随机生成满足条件的圆度、轴线直线度及圆锥度的变动值,最后按照上述方法在公差带内生成零件的规范模型,如图9所示。
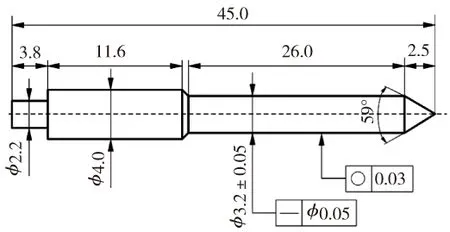
图8 喷油嘴针阀零件图

图9 误差放大200倍规范模型与正常误差规范模型
3规范操作算子
新一代GPS规范要求设计者根据功能要求定义零件的表面模型,对表面模型通过一系列操作,获取几何要素的特征值和极限值,为此需要操作和操作算子数学工具。在喷油嘴针阀的规范设计中,需要的规范操作子为:分离、提取、拟合评估。

图10 分离操作
3.1分离
规范设计中,分离是从规范表面模型中获得相应非理想要素的操作。根据针阀的规范模型,分离出有形位公差要求的非理想表面模型,如图10所示。
3.2提取
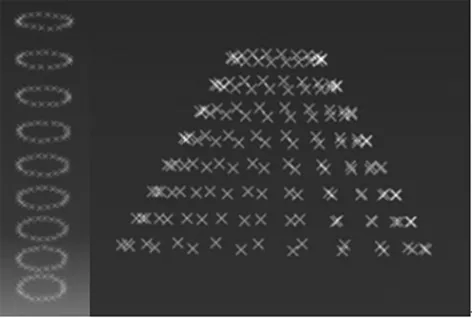
图11 提取操作
提取是根据规则从几何要素上获取一系列点的操作。根据ISO 12180-2,为了拟合计算的方便,本文选取圆周法提取。提取点数根据直径与长度进行[9],对此针阀圆柱面轴向提取9个截面,圆锥面轴向提取5个截面,每个截面内轴向等角度提取30个点,提取结果如图11所示。
3.3拟合
拟合是根据规则用理想要素逼近非理想要素的操作。将提取数据根据最小二乘法进行拟合,拟合即可得到截面圆度误差以及圆柱面和圆锥面上各个截面的圆心,分别将圆柱面和圆锥面上的圆心进行最小二乘拟合。得到圆柱面和圆锥面的轴心线,即评定轴线直线度和圆锥度的基准轴线,如图12所示。

图12 拟合操作
3.4评估
评估是确定要素的值及其公称值与极限值的一种操作。首先通过VB编程找到圆柱截面中距最小二乘圆心最大距离和最小距离的点,两者之差即截面圆度误差值;然后通过VB编程找到圆柱最小二乘圆心到基准轴线最大距离的点,这个距离的2倍即是圆柱轴线直线度误差;最后用VB编程找到圆锥同一截面内距轴线最大距离和最小距离的点,设两者之差为a,则amax·α为圆锥度的评估结果。按照上述方法对拟合结果进行评定,平均圆度误差为0.028mm,轴线直线度误差为0.046mm,圆锥度误差为0.075mm。该结果即为产品特征的规范值,可以看出规范模型能够符合产品的公差要求。
4结论
规范模型是规范设计的重要环节,本文根据喷油嘴针阀的功能要求,确定喷油嘴针阀的主要形位公差类型并建立其数学模型,然后建立了针阀的规范表面模型。通过规范操作算子来指导公差设计,该方法符合新一代GPS规范表面模型的要求,为产品的后续分析提供了坚实基础。
[参考文献]
[1] 蒋向前.新一代GPS标准理论与应用[M].北京:高等教育出版社,2007.
[2] 曹衍龙,茅健,杨将新.直线定向公差数学模型的建立[J].农业机械学报,2007,38(11):93-96.
[3] 蔡敏,杨将新,吴昭同.基于数学定义的圆柱要素形状公差数学模型的研究[J].机械工程学报,2003,39(12):86-90.
[4] 李向前,黄美发,匡兵,等.平面要素规范表面模型生成方法[C].中国电子学会电子机械工程分会2009年机械电子学学术会议论文集,2009:540-546.
[5] X D Zhang, et al. Unified functional tolerancing approach for precision cylindrical components [J].International Journal of Production Research,2005, 43(1): 25-47.
[6] Bourdet Mathew,et al. The concept of small displacement torsors in metrology[J]. Advanced Mathematical Tools in Metrology II in Series on Advances in Mathematics for Applied Science, 1996,40:110-122.
[7] 周鑫,张琳娜,赵凤霞,等.基于GPS的圆柱度公差建模及其规范设计研究[J].机械设计与制造,2012(4):29-31.
[8] ISO/TS 12180-2:2003. Geometrical product specification(GPS)-Cylindricity Part2:Specification operators[S].2003.
[9] 郑玉花,张琳娜,庆科维.新一代GPS的提取方案及其应用研究[J].机械设计与制造,2008(6):193-194.
[10] 张政,厉丹彤,邓佳文,等.基于 CMM的同轴度测量精度分析[J].组合机床与自动化加工技术,2015(4):98-100.
(编辑赵蓉)
The Tolerance Modeling and Specification Design of Nozzle Needle Valve
SUN Yong-hou1,2, ZHANG Yu-xuan1, HUANG Mei-fa1,2,XIAO Zhen-quan1
(1.Mechanical and Electrical Engineering of Guilin University of Electronic and Technology, Guilin Guangxi 541004,China;2.GuangXi Key Laboratory of Manufacturing System & Advanced Manufacturing Technology, Guilin Guangxi 541004, China)
Abstract:Product specification model is the premise of new GPS achieving the duality of the product. First of all, in order to establish nozzle needle valve specification model, the nozzle needle valve mainly mathematical models of the form tolerances are established with three dimensional tolerance domain modeling method based on SDT (small displacement torsor), and then according to the established mathematical model of tolerance, needle valve random points within the geometrical tolerance zone are generated by MATLAB. The random points are imported into CATIA and parts specification model is generated by surface tools. Finally, by the use of specification of the new GPS operators, the specification design of nozzle needle valve is implemented, which provides the foundation for the product function requirements, specification design and measurement certification.
Key words:nozzle needle valve;geometrical tolerance;specification design
文章编号:1001-2265(2016)06-0055-04
DOI:10.13462/j.cnki.mmtamt.2016.06.014
收稿日期:2015-07-22;修回日期:2015-08-20
*基金项目:国家自然科学基金(51365009);广西制造系统与先进制造技术重点实验室主任课题资助项目(13-051-09-009Z);桂林电子科技大学研究生教育创新计划资助项目(GDYCSZ201445)
作者简介:孙永厚(1967—),男,山东沂水人,桂林电子科技大学教授,工学硕士,研究方向为现代设计与制造技术、新一代GPS标准体系理论以及故障诊断专家系统,(E-mail)114431797@qq.com。
中图分类号:TH16;TG506
文献标识码:A
