应用自适应混沌差分进化算法评定圆柱度误差*
2016-07-04车林仙黄勇刚
车林仙,易 建,何 兵,黄勇刚
(1. 重庆工程职业技术学院 机械工程学院,重庆 402260;2. 制造装备机构设计与控制重庆市重点实验室(重庆工商大学),重庆 400067;3. 泸州职业技术学院 机械工程系,四川 泸州 646005)
应用自适应混沌差分进化算法评定圆柱度误差*
车林仙1, 2,易建3,何兵3,黄勇刚2
(1. 重庆工程职业技术学院 机械工程学院,重庆402260;2. 制造装备机构设计与控制重庆市重点实验室(重庆工商大学),重庆400067;3. 泸州职业技术学院 机械工程系,四川 泸州646005)
摘要:根据评定误差的最小包容区域准则,应用坐标变换法建立评定圆柱度误差的4变量无约束优化模型。由于差分进化(Differential evolution, DE)算法具有概念简单和收敛速度快的优点,文中利用一种改进DE算法——自适应混沌DE(Adaptive chaotic DE, ACDE)算法求解评定圆柱度误差的无约束优化问题。通过2个基准函数优化问题的对比测试,验证改进算法的有效性。最后,给出2个圆柱度误差评定实例。结果表明,ACDE算法的计算效率优于遗传算法和蜂群优化算法,可靠性和稳健性优于6种对比智能算法。误差评定模型和求解方法适用于形位误差测量仪器及三坐标测量机。
关键词:圆柱度误差;误差评定;无约束优化;差分进化算法;混沌逃逸
0引言
圆柱面是各类机械零部件中应用最广泛的规则几何要素之一,其形状误差对机械产品的质量和寿命有很大影响,因此圆柱度误差测量与评定在机械制造业(尤其是精密制造)中具有重要理论和实践意义。
圆柱度误差的常用评定方法有最小二乘法(LSC)和最小区域法(MZC)[1]。LSC的实质是寻找被测圆柱面轮廓对应的理想圆柱面,使各测量点到该理想圆柱面的径向距离之平方和取最小值。因其评定原理存在缺陷,故该法很难求得精确圆柱度误差。MZC的实质是寻找两理想同轴圆柱面,使其包容各测量点,且两半径之差取最小值。该法符合ISO1101定义的圆柱度评定方法。多年来,许多学者致力于MZC圆柱度误差评定模型与算法研究。如,李济顺等[2]将坐标变换法与网格搜索技术结合,再用于MZC误差评定。
由于MZC圆柱度误差评定系非线性优化问题,其全局最优解较难获得,而智能算法是求解优化问题的一类有效方法,因此应用现代智能算法确定圆柱度误差是计量技术领域的研究热点之一。贝广霞等[3]应用遗传算法(Genetic algorithm,GA)求解MZC圆柱度误差评定问题,Wen等[4]应用粒子群优化(Particle swarm optimization,PSO)算法求解该问题,罗钧等[5]应用蜂群优化(Bee colony optimization,BCO)算法求解该问题;Zhang等[6]则提出一种PSO与差分进化(Differential evolution,DE)混合算法,再用于误差评定优化问题求解。
DE算法是一种简单高效的群体智能算法,已在数值和工程优化领域获得广泛应用[7]。王东霞等[8]应用DE算法评定平面度误差。车林仙等[9-11]应用改进DE算法求并联机器人机构位置正解,其实质是求无约束优化问题。本文探索应用DE算法求解MZC误差评定中的无约束优化问题。
以圆柱度误差评定为研究对象,在给出最优包容圆筒定义和MZC圆柱度误差评定原理的基础上,应用坐标变换法建立确定圆柱度误差的无约束优化模型,再应用一种改进DE算法——自适应混沌DE(Adaptive chaotic DE,ACDE)算法[9]求解该问题。最后,给出2个误差评定实例。计算结果表明,ACDE算法的计算效率明显优于改进GA[3]和具有禁忌策略的BCO算法[5],可靠性和稳健性优于对比算法。
1圆柱度误差评定数学模型
应用MZC评定圆柱度误差,实质是确定包容点集的两最佳同轴圆柱。为便于叙述,首先给出如下定义。
定义:对于给定的空间点集Sp,作两同轴圆柱,使两柱面之间的区域(即圆筒)包容Sp。以两圆柱半径之差最小为目标确定的惟一圆筒,称为最优包容圆筒;其轴线称为最优轴线。
如图1所示,设接受圆柱度误差评定的空间测点集为{Aj,j=1,2,…,J}(J为测点数),任意点Aj在测量坐标系Oxyz中的坐标为(xj,yj,zj)。根据上述定义和MZC圆柱度误差评定准则,存在包容该点集的最优包容圆筒。过原点O建立与最优包容圆筒固联的坐标系OXYZ,且OZ轴平行于最优轴线CC′。由于OZ轴确定之后,OX,OY轴只要满足右手规则即可,并无特殊要求。为简便起见,令OY轴位于Oy轴和OZ轴确定的平面内。
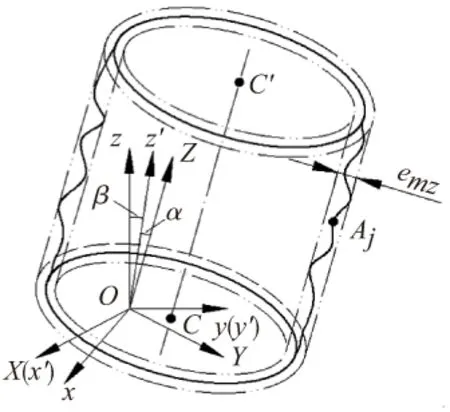
图1 评定圆柱度误差的最优包容圆筒
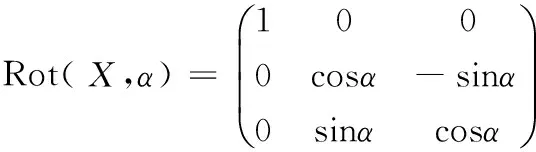
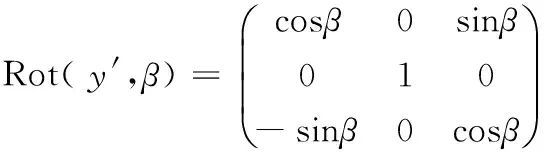
根据运动学原理,可用Y-X-Z型Eluer角表示坐标系Oxyz在坐标系OXYZ中的姿态。因OZ,Oy及OY共面,故可设坐标系OXYZ绕OX轴旋转α角,得坐标系Ox′y′z′;再绕Oy′轴旋转β角,得坐标系Oxyz。那么,坐标系Oxyz的姿态可用二维Euler角(α,β)进行降维表示。设测点Aj在坐标系OXYZ中的坐标为(Xj,Yj,Zj),于是有坐标变换:
(Xj,Yj,Zj)T=Rot(X,α)Rot(y′,β)(xj,yj,zj)T
(j=1,2,…,J)
(1)
式中,Rot(X,α),Rot(y′,β)系旋转矩阵,分别为
设轴线CC′与平面OXY的交点为C(XC,YC,0)。将所有测点Aj向平面OXY投影,各投影点在平面坐标系OXY中的坐标为(Xj,Yj)。最优包容圆筒则投影为圆环,其厚度即为圆柱度最小误差emz。该问题的实质是寻找与最优包容圆筒对应的4元参数组(α,β,XC,YC)。若令x=(x1,x2,x3,x4)T=(α,β,XC,YC)T,则确定该最优参数的非线性规划问题,可转化为如下无约束优化模型:
(2)
由上式求得最小目标函数值f(x*),即为MZC圆柱度误差emz。
常规圆柱度误差评定方法中(如文献[3]),通常以理想圆柱轴线的方向余弦参数(其平方和为1)及轴线上一点的3维坐标为待求参数,因此常规方法为6维决策变量。但在方向余弦参数中,只有2个自由变量(本文搜索Euler角α和β);而理想轴线上有无穷多点,可给定其中1维坐标(本文给定Z=0),转为搜索轴线上的唯一点。由此可知,优化模型式(2)无多余变量,变量间不存在约束关系,故式(2)为含4个自由变量的无约束优化问题。
为方便应用,还需求出坐标系Oxyz下的最优轴线CC′单位矢量n0和点C坐标。根据式(1),可分别得出如下计算式:
n0=(n0x,n0y,n0z)T=[Rot(y′,β)Rot(X,α)]-1(0,0,1)T
(3)
(xC,yC,zC)T=[Rot(y′,β)Rot(X,α)]-1(XC,YC,0)T
(4)
2误差评定的改进差分进化算法
2.1基本差分进化算法

(5)

(6)
式中,CR(0,1),为交叉因子;rand()为(0,1)内服从均匀分布的随机数,对每维分量采样一次;dr{1,…,4},为随机自然数,对每对交叉个体采样一次,确保试验个体中至少有一维分量来自变异个体。若分量越界,则在其取值范围内随机生成该维分量。
(7)
2.2自适应混沌差分进化算法
ACDE算法详细流程及收敛性证明参见文献[9],以下仅简述算法改进思路。
(1)分类变异策略
对于目标函数值小于当前代种群平均目标函数值的较优个体,按式(5)生成变异个体;而对于目其余较差个体,则沿目标函数值降低的方向生成变异个体,即将式(5)改进为:
(8)
式中,sgn(·)为符号函数。
(2)混沌逃逸操作
若相邻两代种群之间的最优目标函数值满足
(9)


(10)
(3)精英个体保留策略
2.3算法优化性能验证
应用2个基准函数作为测试问题(均为最小化问题),以GA,PSO算法,人工蜂群(Artificial bee colony algorithm,ABC)[12]算法,基本DE算法[7](将采用DE/rand/1bin和DE/best/2/bin变异策略的基本算法分别记为DE1和DE2)和带选择文档的自适应DE算法(简记为JADE[13])等6种算法为对比算法,验证ACDE算法的有效性。与圆柱度误差评定问题式(2)类似,这2个函数均为小维数多极值较难优化问题。
Schaffer函数(简记为SC):

Hartman函数(简记为HA):

xd[0,1],d=1,2,…,6。
b=

c=(1,1.2,3,3.2)。
为公平起见,7种算法的N及T一致,即均取N=40,T=200。

7种算法分别独立运行50次,优化性能指标统计见表1。表中,fb,fw,fav和σf分别表示最好、最差、平均最优目标函数值和标准差。平均最优目标函数值进化曲线如图2所示。
要进一步强化基层检疫申报点建设,科学配置检疫、日常办公所需设施设备,合理安排检疫工作人员,优化检疫申报点设置,明确检疫申报点功能,产地检疫申报点和屠宰检疫申报点应分开设置,严禁混合办公。要进一步完善检疫人员准入、退出、考核、奖惩和监督管理制度,加强岗前培训和在岗人员轮训,提高检疫人员业务水平。

表1 7种算法求解测试函数的性能指标比较


图2 求解测试函数的平均最优适应度进化曲线
由表1可知,对于2个测试函数,ACDE算法的指标fw,fav和σf均优于对比算法。6种对比算法的fav和σf均偏大(图2也可印证fav偏大),表明其优化性能不稳定,有陷入局部最优区域的可能。而ACDE算法的σf很小(求解SC函数时为0),表明算法陷入局部最优区域后,可通过执行混沌逃逸操作来跳出该区域,使种群继续搜索全局最优解,因此改进算法具有良好稳健性。
3圆柱度误差评定实例
3.1误差评定结果
以下用2个实例(测点坐标见表2和3)来验证本文模型和算法的有效性。其中,例1数据引自文献[3,5],例2数据引自文献[2]。ACDE算法除T=400外,其余参数设置同SC函数(见第2.3节)。决策矢量取值下限l=(0rad,0rad,-10mm,-10mm)T,上限u=(2πrad,2πrad,10mm,10mm)T。
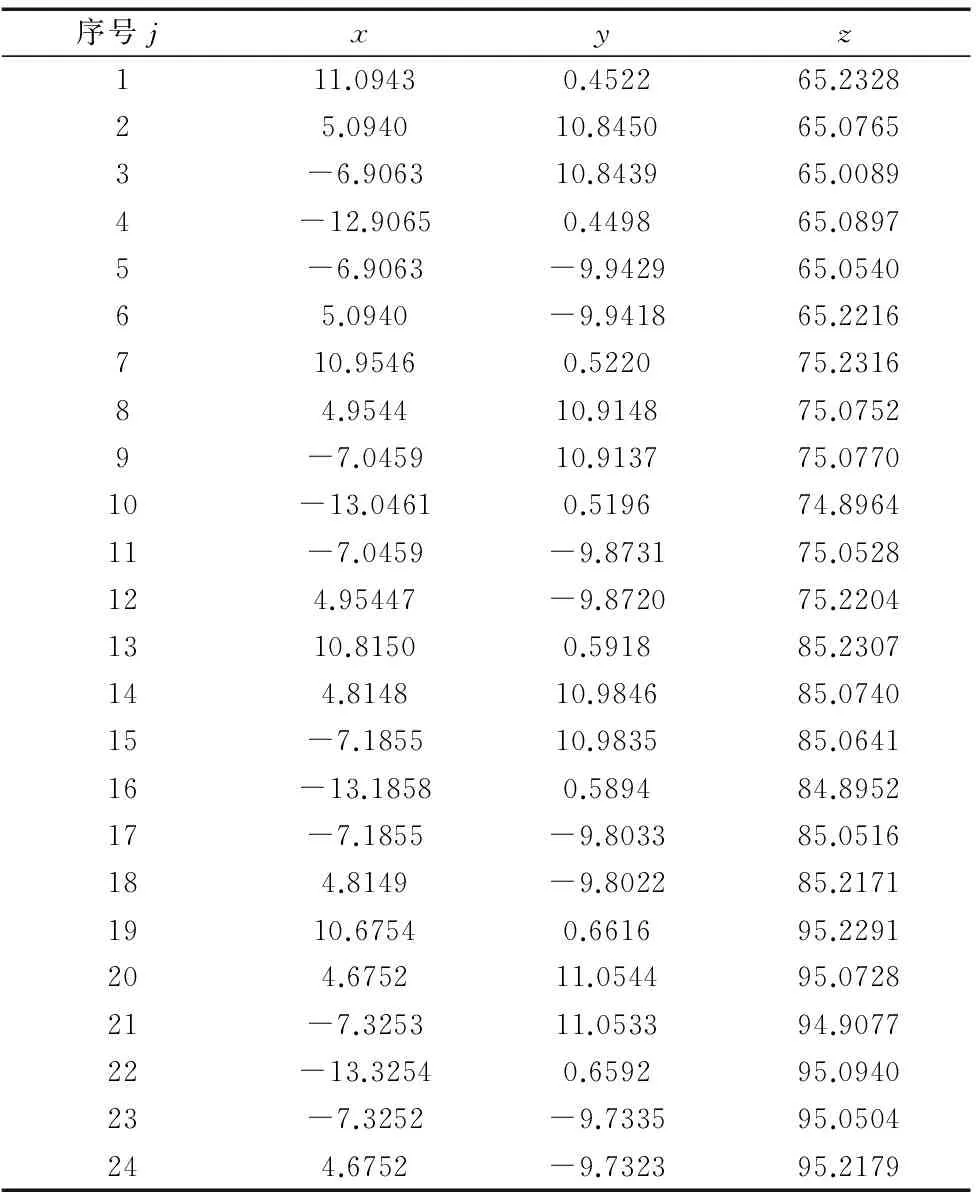
表2 实例1的测点坐标 mm

表3 实例2的测点坐标 mm
应用ACDE算法求得的最优结果见表4。表中,最优轴线CC′单位矢量n0和点C坐标,系最优解分别经式(3)和(4)变换所得。同时,将相关文献中的最优解也列入表4(其中,点C的坐标是据原文献位置参数经坐标变换所得),以便比较。

表4 圆柱度误差评定结果比较
由表4可知,对例1,三坐标测量机软件[3]、改进GA[3]、具有禁忌策略的BCO算法[5]和ACDE算法确定的最优解接近,但ACDE算法的精度更高。文献[3]的最大函数评价次数为40000,文献[5]的函数评价次数为80000;而ACDE算法的基本函数评价次数为16000。ACDE算法独立运行100次,经统计,该算法因执行混沌逃逸操作而增加的平均函数评价次数为179,相对于基本算法可忽略不计,故该操作几乎不影响计算效率。因此,本文计算效率明显高于文献[3,5]。
对例2,ACDE算法确定的圆柱度误差较网格搜索算法[2]的最好结果提高约0.27μm。由此可见,ACDE算法的精度高于文献[2]。
3.27种智能算法对比测试
为验证ACDE算法求解圆柱度误差评定问题的有效性,以下仍比较7种算法的性能指标。因篇幅所限,仅给出例1的测试结果。为公平起见,7种算法均取T=400,其余参数设置同SC函数(见第2.3节)。GA和ABC算法均以1/f(x)为适应度。
由表5可知,ACDE算法除fb与DE1,DE2和JADE算法相当外,其余指标均好于6种对比算法。GA,PSO和ABC算法的rs为0或1%,表明这3种算法求解例1的全局优化能力差,收敛速度慢(图3所示平均最优目标函数值进化曲线也可验证此结论)。DE算法的rs很高,但仍有几次陷入局部最优区域,导致其fav和σf较大;ACDE算法能全部收敛于全局最优解的邻域,其fb与fw很接近,σf非常小。由图3可知,ACDE算法在最差情况下,进化至250代左右即可收敛于全局最优解,表明其敛速快、可靠性高。综上可知,ACDE算法在计算可靠性和稳健性方面明显优于6种对比算法。由于ACDE算法具有良好优化性能,故可将文中的误差评定模型和算法作为关键模块之一,封装在三坐标测量软件中,提高评定精度和可靠性。

表5 7种算法求解实例1的性能指标比较

图3 7种算法求解实例1的平均进化曲线比较
4结论
(1)在给出最优包容圆筒定义和MZC圆柱度误差评定原理的基础上,应用坐标变换方法,建立确定圆柱度误差的4变量无约束优化模型。
(2)应用ACDE算法确定圆柱度误差评定问题的最优解,新算法的最优解与已有文献结果相当,但计算效率明显高于对比文献。本文方法可推广到其他形位误差评定问题中。
(3)仿真结果表明:ACDE算法的性能指标fw,fav,σf和rs优于GA,PSO,ABC,基本DE和JADE等6种对比算法,收敛精度和计算可靠性高。
[参考文献]
[1] 黄祥. 基于最小区域法的圆柱度几何误差评定[J]. 组合机床与自动化加工技术, 2013(6): 27-29.
[2] 李济顺, 雷贤卿, 薛玉君, 等. 基于坐标变换的圆柱度误差评定算法[J]. 中国机械工程, 2009, 20(16): 1983-1986.
[3] 贝广霞, 楼佩煌, 王晓勇, 等. 基于遗传算法的圆柱度误差评定方法[J]. 山东大学学报: 工学版, 2008, 38(2): 33-36, 50.
[4] Wen Xiulan, Huang Jiacai, Sheng Danghong, et al. Conicity and cylindricity error evaluation using particle swarm optimization[J]. Precision Engineering, 2010, 34(2): 338-344.
[5] 罗钧, 卢嘉江, 陈伟民, 等. 具有禁忌策略的蜂群算法评定圆柱度误差[J]. 重庆大学学报, 2009, 32(12): 1482- 1485.
[6] Zhang Xiangchao, Jiang Xiangqian, Scott P J. A reliable method of minimum zone evaluation of cylindricity and conicity from coordinate measurement data[J]. Precision Engineering, 2011, 35(3): 484-489.
[7] Das S, Suganthan P N. Differential evolution: A survey of the state-of-the-art[J]. IEEE Transactions on Evolutionary Computation, 2011, 15(1): 4-30.
[8] 王东霞, 温秀兰, 汪凤林. 基于微分进化算法的平面度误差评定[J]. 组合机床与自动化加工技术, 2013(12): 18-20, 24.
[9] 车林仙. 面向机构分析与设计的差分进化算法研究[D]. 徐州: 中国矿业大学, 2012.
[10] 车林仙, 程志红, 何兵. 4-PRUR并联机构及其位置分析的差分进化算法[J]. 机械工程学报, 2010, 46(23): 36-44.
[11] 车林仙, 何兵, 程志红. 6-CRS并联机器人机构及其位置分析[J]. 中国机械工程, 2010, 21(14): 1669- 1675.
[12] Karaboga D, Basturk B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm[J]. Journal of Global Optimization, 2007, 39(3): 459-471.
[13] Zhang Jingqiao, Sanderson A C. JADE: Adaptive differential evolution with optional external archive[J]. IEEE Transactions on Evolutionary Computation, 2009, 13(5): 945- 958.
(编辑赵蓉)
Adaptive Chaotic Differential Evolution Algorithm for Evaluation of the Cylindricity Error
CHE Lin-xian1,2, YI Jian3, HE Bing3, HUANG Yong-gang2
(1. School of Mechanical Engineering, Chongqing Vocational Institute of Engineering, Chongqing 402260, China;2. Chongqing Municipal Key Laboratory of Mechanism Design and Control for Manufacturing Equipment (Chongqing Technology and Business University), Chongqing 400067, China)
Abstract:An unconstrained optimization model with 4 variables is constructed to evaluate cylindricity errors by utilizing the coordinate transformation method according to the minimum zone criteria for evaluating errors. The difference evolution (DE) algorithm is characterized by simple concept and quick convergence. Thus a modified DE algorithm, namely adaptive chaotic DE (ACDE) algorithm, is implemented to solve the unconstrained optimization problem for evaluating cylindricity errors. The modified algorithm is tested against two benchmark examples of function optimization and the results verify its effectiveness. Finally, two real cases for evaluating cylindricity errors are given to test ACDE algorithm, and the experimental results demonstrate that its computational efficiency is superior to that obtained by the genetic algorithm or bee colony optimization, and it outperforms the six compared intelligence algorithms in terms of reliability and robustness. It is suited for evaluation of position measuring instruments and the coordinate measuring machines.
Key words:cylindricity error; error evaluation; unconstrained optimization; differential evolution algorithm; chaotic escape
文章编号:1001-2265(2016)06-0016-05
DOI:10.13462/j.cnki.mmtamt.2016.06.005
收稿日期:2015-07-29;修回日期:2015-08-13
*基金项目:重庆市教育委员会科学技术研究项目(KJ1403201);四川省教育厅重点科技计划项目(14ZA0333)
作者简介:车林仙(1971—),男,四川泸州人,重庆工程职业技术学院教授,博士,研究方向为机械优化设计、机构设计和智能信息处理,(E-mail) lx.che@qq.com。
中图分类号:TH161.13;TG506
文献标识码:A