直接驱动数控转台抗负载扰动研究*
2016-07-04暨利勇沈建新
暨利勇,沈建新
(南京航空航天大学 机电学院,南京 210016)
直接驱动数控转台抗负载扰动研究*
暨利勇,沈建新
(南京航空航天大学 机电学院,南京210016)
摘要:针对力矩电机易受参数扰动和外界干扰影响的特点,利用基于负载转矩观测器的前馈补偿方法提高直接驱动数控转台的抗负载扰动能力。所设计的降阶负载转矩观测器采用电机转角代替电机转速作为输入,输出中的转速观测值还可用作速度环反馈信号,因而避免了由转角微分求转速可能引入的高频噪音。仿真结果表明,相较于常规PI控制,所提出的控制策略具有更好的鲁棒性,能够显著提高转台的抗负载扰动能力。
关键词:数控转台;直接驱动;抗负载扰动;负载转矩观测器
0引言
数控转台是各类四轴及四轴以上数控机床的关键配套功能部件,其性能优劣和技术水平高低直接影响着数控机床整机的加工性能和发展水平。直接驱动数控转台取消了从电机到台面之间的一切中间传动环节,将转台旋转部分直接与环形永磁力矩电机转子刚性固联,从而消除了中间传动机构带来的摩擦磨损、弹性变形和反向间隙等对系统精度和控制性能的影响,具有结构简单、加速度大、响应速度快以及定位精度高等优点,代表了数控转台未来的发展方向。但由于直接驱动技术完全用“电”来代替原来的机械传动环节,因此数控转台伺服系统对参数不确定性及负载扰动更为敏感,其稳定性和鲁棒性大大降低[1]。
目前,电机调速系统中普遍采用的PI控制虽然具有算法简单、可靠性高及调速方便等优点,但在外界扰动过大或电机内部参数发生变化时,难以满足精确的定位及调速要求[2]。因此,针对直接驱动数控转台的特点,尝试采用基于负载转矩观测器的前馈补偿方法提高其抗负载扰动能力。
1力矩电机的数学模型
力矩电机本质上是一种大力矩的三相永磁同步电机。与普通永磁同步电机相比,它在结构上具有以下特点:①长径比小,轴向长度短;②极对数多,转子上安排有大量永磁体以提供大转矩[3]。
假设气隙磁场正弦分布、磁路不饱和,并忽略铁心涡流与磁滞损耗,可得力矩电机在d-q旋转坐标系下的数学模型(电压方程、电磁转矩方程、机械运动方程)[4-6]:
其中,ud、uq分别为d、q轴的电压,id、iq分别为d、q轴的电流,Ld、Lq分别为d、q轴的电感,Te、TL分别为电磁转矩、负载转矩,ωe、ωm分别为电角速度、机械角速度,J为转动惯量,R为定子电阻,np为磁极对数,B为阻尼系数,ψ为转子永磁体与定子交链磁链。
若力矩电机矢量控制系统的电流控制方法采用id=0控制,则式(3)可改写为:
Te=1.5npψiq
(5)
2负载转矩观测器的设计
文献[7]设计的负载转矩观测器需要转速微分作为输入,而文献[2,5,8-12]设计的负载转矩观测器则需要转速作为输入。转速通常是由转角微分得到,受机械传感器对转子位置测量分辨率和量化误差的影响,直接微分得到的速度量往往含有很大的微分噪声,所以常常使用一个滑动平均或低通滤波器,但是这样又会造成动态过程中速度测量的相位延迟,影响系统的动态响应速度[13-14]。因此,基于文献[15-16]的设计思想对文献[10]建立的降阶负载转矩观测器进行改进,以直接测量得到的转角作为观测器的输入,以转速和负载转矩作为观测器的输出,不仅实现了负载转矩的有效观测,还可以将转速观测值用做速度环反馈信号、从而使控制系统彻底避免了对转角的微分。
文献[10]建立的降阶负载转矩观测器如图1所示,相应的表达式为:

图1 文献[10]建立的降阶负载转矩观测器
将式(6)、(7)中的含有ωm的项移到等号左边,可得改进的降阶负载转矩观测器,表达式如下:


图2 本文建立的降阶负载转矩观测器
3仿真研究
采用基于负载转矩观测器的前馈补偿方法建立的直接驱动数控转台控制系统如图3所示。依据图3在Simulink软件中建立仿真模型并进行数值仿真。仿真所用的电机为德国西泰克(CyTec)公司生产的RM166/100型环形永磁力矩电机,仿真参数如下:磁极对数np=15,定子电阻R=2Ω,定子电感Ld=Lq=51mH,转矩系数KT=9.4N·m·A-1,阻尼系数B=0.09N·m·(rad/s)-1,总转动惯量J=0.3kg·m2。转台给定转速120r/min,空载启动,在0.5s加载TL=120N·m。
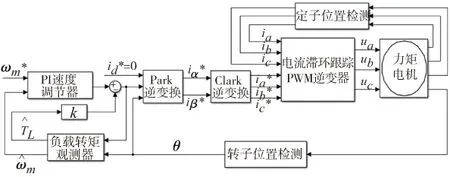
图3 基于前馈补偿方法的转台控制系统原理图
采用前馈补偿方法的转台控制系统仿真结果见图4。图4a中,图例PI表示采用常规PI控制(Kp=6,Ki=100),图例PI+Torque_Observer表示在常规PI控制的基础上增加前馈补偿(Kp=10,Ki=1,k=1/9.4,k1=2579.3,k2= -60000),两者在加载后的转速降和恢复时间分别为18r/min、0.25s和12 r/min、0.035s,可见基于负载转矩观测器的前馈补偿方法显著增强了转台的抗扰性;此外,增加前馈补偿还可以显著改善转台的启动性能,实现速度环无超调快速跟踪,而采用常规PI控制时的速度超调量高达20 r/min。图4b、4c分别为负载转矩和转速观测效果,可见观测精度较高、观测器设计合理。图4d表明,转速观测值可用作速度环反馈信号。

图4 前馈补偿方法的仿真结果
4结论
采用常规PI控制时,为了保证力矩电机在负载转矩作用后转速无静差所采用的比例系数和积分系数往往会使其动态性能变差、转速超调严重,转台伺服系统难以取得较好的综合控制性能。
本文利用基于负载转矩观测器的前馈补偿方法提高直接驱动数控转台的抗负载扰动能力。增加前馈补偿允许PI速度调节器减小比例系数和积分系数,从而减小转速超调量、乃至实现转速无超调快速跟踪。仿真结果表明,相较于常规PI控制,所采用的控制策略可以实现转台速度环的强抗负载扰动性和无超调快速跟踪。
[参考文献]
[1] 孙宜标,金石,王成元.直接驱动数控转台的QFT-H_∞控制[J].组合机床与自动化加工技术,2006(11):48-51.
[2] 李政,胡广大,崔家瑞,等.永磁同步电机调速系统的积分型滑模变结构控制[J].中国电机工程学报,2014,34(3):431-437.
[3] 葛秀苇.环形力矩电机动态滑模控制研究[D].沈阳:沈阳工业大学,2011.
[4] 高月波,王勉华,张国平,等.高性能高精度力矩电机伺服控制系统设计[J].微电机,2012,45(2):52-55.
[5] 张晓光,孙力,赵克.基于负载转矩滑模观测的永磁同步电机滑模控制[J].中国电机工程学报,2012,32(3):111-116.
[6] 舒志兵,周玮,李运华,等.交流伺服运动控制系统[M].北京:清华大学出版社,2006.
[7] 刘鎏,尹泉,王庆义.一种基于转矩补偿的PMSM矢量控制系统设计[J].伺服控制,2011(2):34-36.
[8] 刘颖,周波,方斯琛.基于新型扰动观测器的永磁同步电机滑模控制[J].中国电机工程学报,2010,30(9):80-85.
[9] 高扬,杨明,于泳,等.基于扰动观测器的PMSM交流伺服系统低速控制[J].中国电机工程学报,2005,25(22):128-132.
[10] 鲁文其,胡育文,梁骄雁,等.永磁同步电机伺服系统抗扰动自适应控制[J].中国电机工程学报,2011,31(3):75-81.
[11] 王志宇,王长松,齐昕,等.永磁同步电机自适应滑模负载观测器研究[J].电机与控制学报,2012,16(1):45-49.
[12] 焦山旺,施火泉,汤一林.基于改进型指数趋近率的PMSM滑模控制[J].江南大学学报(自然科学版),2014,13(4):421-426.
[13] 郑泽东,李永东,肖曦,等.永磁同步电机负载转矩观测器[J].电工技术学报,2010,25(2):30-36.
[14] Kickul H,Kwanghee N.A disturbance torque compensation scheme considering the speed measurement delay[C].Industry Applications Conference,San Diego,America,1996.
[15] 张兵,唐猛,廖海洲.基于负载观测的PMSM滑模抗扰动自适应控制[J].工程设计学报,2013,20(5):427-433.
[16] GENE F Franklin,POWEEL J Dvaid,ABBAS Emami-Naeini.动态系统的反馈控制 [M].4版.朱齐丹,译.北京:电子工业出版社,2004.
(编辑赵蓉)
Research on Anti-Load Disturbance of Direct Drive Numerical Control Rotary Table
JI Li-yong,SHEN Jian-xin
(College of Mechanical and Electrical Engineering, Nanjing University of Aeronautics and Astronautics , Nanjing 210016, China)
Abstract:A feed-forward compensation method based on load torque observer was proposed to improve the anti-load disturbance ability of direct drive NC rotary tables. The reduced-order load torque observer uses motor rotation instead of motor speed as input, hence avoids the introduction of differential mutation. Simulation results based on Simulink showed that the proposed controller has no overshoot, faster response and better anti-load disturbance ability compared with traditional PI controller.
Key words:numerical control rotary table; direct drive; anti-load disturbance; load torque observer
文章编号:1001-2265(2016)06-0005-03
DOI:10.13462/j.cnki.mmtamt.2016.06.002
收稿日期:2015-07-18
*基金项目:"高档数控机床与基础制造装备"国家科技重大专项 (2014ZX04001071)
作者简介:暨利勇(1988—),男,南京航空航天大学硕士研究生,研究方向为数控转台,(E-mail)jiliyong@foxmail.com;沈建新(1969—),男,南京航空航天大学教授,博导,研究方向为数字化设计制造技术、飞机柔性装配技术、可重构工装设计技术与数字化医疗装备技术,(E-mail)cadatc@nuaa.edu.cn。
中图分类号:TH166;TG659
文献标识码:A
